Область техники, к которой относится изобретение
Настоящее изобретение относится к электродвигателю, который включает в себя совокупность подвижных элементов или неподвижных статоров и преобразует подводимую электрическую мощность в движущую силу, вырабатываемую на подвижных элементах.
Предпосылки создания изобретения
В качестве электродвигателя этого вида из предшествующего уровня техники известен электродвигатель, раскрываемый в патентной литературе 1. Электродвигатель является так называемой вращающейся машиной и включает в себя первый ротор и второй ротор, соединенные соответственно с первым вращающимся валом и вторым вращающимся валом, и один статор. Первый и второй вращающиеся валы размещены концентрически один относительно другого, а первый ротор, второй ротор и статор размещены в направлении радиуса первого вращающегося вала в указанном порядке, начиная от внутренней стороны.
Первый ротор включает в себя совокупность первых постоянных магнитов и вторых постоянных магнитов, выстроенных в окружном направлении. Первые и вторые постоянные магниты выстроены параллельно одни другим в направлении оси первого ротора. Статор выполнен так, что при подводе электрической мощности генерирует первое вращающееся магнитное поле и второе вращающееся магнитное поле, которые вращаются в окружном направлении. Первое вращающееся магнитное поле генерируется между статором и участком первого ротора со стороны первых постоянных магнитов, а второе вращающееся магнитное поле генерируется между статором и участком первого ротора со стороны вторых постоянных магнитов. Второй ротор включает в себя совокупность первых сердечников и вторых сердечников, выстроенных в окружном направлении. Эти первые и вторые сердечники образованы элементами из магнитомягкого материала. Первые сердечники размещены между участком первого ротора со стороны первых постоянных магнитов и статором, а вторые сердечники размещены между участком первого ротора со стороны вторых постоянных магнитов и статором. Количество магнитных полюсов первых и вторых постоянных магнитов, количество магнитных полюсов первых и вторых вращающихся магнитных полей и количество первых и вторых сердечников задано равными одни другим.
В электродвигателе описываемой выше конструкции в результате намагничивания первого и второго сердечников под действием магнитных полюсов первого и второго вращающихся магнитных полей, генерируемых при подводе электрической мощности к статору, между этими элементами генерируются магнитные силовые линии. При этом под действием магнитных сил в направлении магнитных силовых линий первый и второй роторы приводятся в движение, и на первом и втором вращающихся валах вырабатывается движущая сила.
Для обеспечения должного действия магнитных сил в направлении магнитных силовых линий, обусловливающего преобразование электрической мощности, подводимой к статору, в движущую силу, вырабатываемую на первом и втором вращающихся валах, в конструкции описываемого выше традиционного электродвигателя требуется наличие не только первого ряда элементов из магнитомягкого материала, состоящего из совокупности первых сердечников, но также и второго ряда элементов из магнитомягкого материала, состоящего из совокупности вторых сердечников, что неизбежно приводит к увеличению размеров электродвигателя и повышению стоимости его изготовления. Кроме того, конструкция этого электродвигателя обусловливает возможность его реализации только при выполнении соотношения между скоростями, при котором разность между числом оборотов первого и второго вращающихся магнитных полей и числом оборотов второго ротора и разность между числом оборотов второго ротора и числом оборотов первого ротора становятся равными одна другой, что уменьшает степень свободы при проектировании электродвигателя.
Настоящее изобретение направлено на разрешение указанных выше проблем, и его целью является создание электродвигателя с уменьшенными размерами, сниженной стоимостью изготовления и увеличенной степенью свободы при его проектировании.
Патентная литература 1
Публикация №2008-67592 выложенной заявки Японии (Kokai).
Раскрытие изобретения
Для достижения указанной выше цели в п.1 формулы изобретения предлагается электродвигатель 1, 31, содержащий первую структуру (первый ротор 4, первый вращающийся вал 6, второй статор 34), включающую в себя ряд магнитных полюсов, где ряд магнитных полюсов образован определенной совокупностью магнитных полюсов (постоянные магниты 4а, 34а), которые выстроены в определенном направлении и размещены так, что каждые два соседних магнитных полюса имеют полярности, отличающиеся одна от другой, вторую структуру (статор 3, первый статор 33), включающую в себя ряд якорей, где ряд якорей образован совокупностью якорей (железный сердечник 3а, катушки 3с-3е индуктивности U-W-фаз, железный сердечник 33а, катушки 33с-33е индуктивности U-W-фаз), выстроенных в определенном направлении и размещенных напротив ряда магнитных полюсов для генерирования подвижных магнитных полей, движущихся в определенном направлении, между рядом якорей и рядом магнитных полюсов за счет определенной совокупности магнитных полюсов якорей, генерируемых в совокупности якорей при подводе к ним электрической мощности, и третью структуру (второй ротор 5, второй вращающийся вал 7, подвижный элемент 35), включающую в себя ряд элементов из магнитомягкого материала, где ряд элементов из магнитомягкого материала образован определенной совокупностью элементов из магнитомягкого материала (сердечники 5а, сердечники 35b), выстроенных в определенном направлении с зазором один относительно другого и размещенных так, что ряд элементов из магнитомягкого материала располагается между рядом магнитных полюсов и рядом якорей, причем соотношение между числом магнитных полюсов якорей, числом магнитных полюсов и числом элементов из магнитомягкого материала в пределах определенного участка вдоль определенного направления задается пропорцией 1:m:(1+m)/2(m≠1,0).
В этом электродвигателе ряд магнитных полюсов первой структуры и ряд якорей второй структуры располагаются один против другого, а ряд элементов из магнитомягкого материала третьей структуры размещен так, что располагается между рядом магнитных полюсов и рядом якорей. Совокупности магнитных полюсов, якорей и элементов из магнитомягкого материала, образующие соответственно ряд магнитных полюсов, ряд якорей и ряд элементов из магнитомягкого материала, выстроены в определенном направлении. Кроме того, при подводе электрической мощности к ряду якорей генерируется совокупность магнитных полюсов якорей, и за счет магнитных полюсов якорей между рядом якорей и рядом магнитных полюсов генерируются подвижные магнитные поля, движущиеся в определенном направлении. При этом каждые два соседних магнитных полюса имеют полярности, отличающиеся одна от другой, а каждые два соседних элемента из магнитомягкого материала размещаются с зазором один относительно другого. Как указывалось выше, между рядом магнитных полюсов и рядом якорей под действием совокупности магнитных полюсов якорей генерируются подвижные магнитные поля, и между рядом магнитных полюсов и рядом якорей размещен ряд элементов из магнитомягкого материала, поэтому под действием магнитных полюсов якорей и магнитных полюсов элементы из магнитомягкого материала подвергаются намагничиванию. Это намагничивание, а также размещение каждых двух соседних элементов из магнитомягкого материала с зазором один относительно другого обусловливают генерирование магнитных силовых линий, соединяющих магнитные полюса, элементы из магнитомягкого материала и магнитные полюса якорей одни с другими. Кроме того, действие магнитных сил в направлении магнитных силовых линий обеспечивает преобразование электрической мощности, подводимой к якорям, в движущую силу, вырабатываемую на первой структуре, второй структуре и третьей структуре.
В этом случае, например, когда электродвигатель согласно настоящему изобретению имеет конструкцию, удовлетворяющую следующим условиям (а) и (b), соотношение между скоростями подвижных магнитных полей первой и третьей структур и соотношение между вращающими моментами структур с первой по третью выражаются следующим образом, а эквивалентная схема, соответствующая электродвигателю, имеет вид, показанный на фиг.19.
(a) Электродвигатель является вращающейся машиной, и якоря имеют трехфазные катушки индуктивности U-фазы, V-фазы и W-фазы.
(b) Число магнитных полюсов якорей составляет 2, число магнитный полюсов - 4, то есть число пар магнитных полюсов якорей, в которых полюс N и полюс S образуют одну пару, составляет 1, число пар магнитных полюсов, в которых полюс N и полюс S образуют одну пару, составляет 2, а число элементов из магнитомягкого материала - 3.
При этом по всему описанию изобретения термин "пара полюсов" означает пару полюсов, образуемую полюсом N и полюсом S.
В этом случае магнитный поток Ψk1 магнитного полюса, пересекающий первый элемент из магнитомягкого материала в составе элементов из магнитомягкого материала, выражается следующим уравнением (1):

где ψf представляет собой максимальное значение магнитного потока магнитного полюса, а θ1 и θ2 - соответственно угол поворота магнитного полюса и угол поворота элемента из магнитомягкого материала относительно катушки индуктивности U-фазы. Кроме того, в этом случае, так как отношение числа пар магнитных полюсов к числу пар магнитных полюсов якорей составляет 2,0, то магнитный поток магнитного полюса вращается (изменяется) с периодом повторения, в два раза превышающим период повторения подвижных магнитных полей, что в приведенном выше уравнении (1) выражается умножением (θ2-θ1) на 2,0.
Поэтому магнитный поток Ψu1 магнитного полюса, пересекающий катушку индуктивности U-фазы через посредство первого элемента из магнитомягкого материала, выражается следующим уравнением (2), полученным путем умножения уравнения (1) на cosθ2.

Точно так же магнитный поток Ψk2 магнитного полюса, пересекающий второй элемент из магнитомягкого материала в составе элементов из магнитомягкого материала, выражается следующим уравнением (3):

Так как угол поворота второго элемента из магнитомягкого материала относительно якоря опережает угол поворота первого элемента из магнитомягкого материала на 2π/3, то в вышеупомянутом уравнении (3) это выражается суммированием 2π/3 с θ2.
Поэтому магнитный поток Ψu2 магнитного полюса, пересекающий катушку индуктивности U-фазы через посредство второго элемента из магнитомягкого материала, выражается следующим уравнением (4), полученным путем умножения уравнения (3) на cos(θ2+2π/3).

Точно так же магнитный поток Ψu3 магнитного полюса, пересекающий катушку индуктивности U-фазы посредством третьего элемента из магнитомягкого материала в составе элементов из магнитомягкого материала, выражается следующим уравнением (5):

В электродвигателе, показанном на фиг.19, магнитный поток Ψu магнитного полюса, пересекающий катушку индуктивности U-фазы через посредство элементов из магнитомягкого материала, получают путем суммирования магнитных потоков Ψu1-Ψu3, выражаемых приведенными выше уравнениями (2), (4) и (5), и поэтому магнитный поток Ψu выражается следующим уравнением (6):

При обобщении уравнения (6) магнитный поток Ψu магнитного полюса, пересекающий катушку индуктивности U-фазы через посредство элементов из магнитомягкого материала, выражается следующим уравнением (7):

где a, b и с представляют собой соответственно число пар магнитных полюсов, число элементов из магнитомягкого материала и число пар магнитных полюсов якорей.
При преобразовании приведенного выше уравнения (7) с учетом формулы суммы и произведения тригонометрических функций получается следующее уравнение (8):

Если в уравнении (8) положить, что b=а+с, то с учетом того, что cos(θ+2π)=cosθ, уравнение (8) преобразуется в следующее уравнение (9):
При преобразовании этого уравнения (9) с учетом теоремы сложения тригонометрических функций получается следующее уравнение (10):
При условии, что а-с≠0, второй член в правой части уравнения (10) при преобразовании с учетом суммы ряда и формулы Эйлера становится равным 0, как показано в следующем уравнении (11):
Кроме того, при условии, что а-с≠0, третий член в правой части уравнения (10) при преобразовании с учетом суммы ряда и формулы Эйлера, как показано в следующем уравнении (12), становится равным 0:
Из приведенных выше уравнений следует, что при а-с≠0 магнитный поток Ψu магнитного полюса, пересекающий катушку индуктивности U-фазы через посредство элементов из магнитомягкого материала, выражается следующим уравнением (13):

Если в этом уравнении (13) положить, что а/с=α, то получится следующее уравнение (14):

Кроме того, если в этом уравнении (14) положить, что с·Еθ2=θе2, а с·Еθ1=θe1, то получится следующее уравнение (15):

В этом уравнении, как следует из того, что θе2 является произведением угла θ2 поворота элемента из магнитомягкого материала относительно катушки индуктивности U-фазы на число с магнитных полюсов якорей, θе2 представляет собой электрический угол элемента из магнитомягкого материала относительно катушки индуктивности U-фазы. Кроме того, как следует из того, что θе1 является произведением угла θ1 поворота магнитного полюса относительно катушки индуктивности U-фазы на число пар магнитных полюсов якорей, θе1 представляет собой электрический угол магнитного полюса относительно катушки индуктивности U-фазы.
Точно так же, так как электрический угол катушки индуктивности V-фазы опережает электрический угол катушки индуктивности U-фазы на 2π/3, то магнитный поток Ψv магнитного полюса, пересекающий катушку индуктивности V-фазы через посредство элементов из магнитомягкого материала, выражается следующим уравнением (16). Кроме того, так как электрический угол катушки индуктивности W-фазы опережает электрический угол катушки индуктивности U-фазы на 2π/3, то магнитный поток Ψw магнитного полюса, пересекающий катушку индуктивности W-фазы через посредство элементов из магнитомягкого материала, выражается следующим уравнением (17):


Кроме того, если магнитные потоки Ψu-Ψw, выражаемые приведенными выше уравнениями соответственно (15)-(17), подвергнуть дифференцированию по времени, то получатся следующие уравнения (18)-(20):



где ωе1 обозначает величину, полученную дифференцированием θe1 по времени, то есть величину, полученную в результате преобразования угловой скорости первой структуры относительно второй структуры в электрическую угловую скорость, а ωе2 обозначает величину, полученную дифференцированием θе2 по времени, то есть величину, полученную в результате преобразования угловой скорости третьей структуры относительно второй структуры в электрическую угловую скорость.
Кроме того, магнитные потоки, пересекающие катушки индуктивности U-W-фаз непосредственно, без посредства элементов из магнитомягкого материала, являются весьма малыми, и их влиянием можно пренебречь. Поэтому dΨu/dt-dΨw/dt, являющиеся величинами, полученными дифференцированием соответственно магнитных потоков Ψu-Ψw (уравнения (18)-(20)) магнитных полюсов, пересекающих катушки индуктивности U-W-фаз через посредство элементов из магнитомягкого материала, по времени, представляют собой напряжения противоЭДС (напряжения индуктированной ЭДС), генерируемые в катушках индуктивности U-W-фаз при вращении (движении) магнитных полюсов и элементов из магнитомягкого материала относительно ряда якорей.
Из приведенных выше уравнений следует, что электрические токи Iu, Iv и Iw, протекающие соответственно через катушки индуктивности U-фазы, V-фазы и W-фазы, выражаются следующими уравнениями (21), (22) и (23):



где I представляет собой амплитуду (максимальное значение) каждого электрического тока, протекающего через катушки индуктивности U-W-фаз.
Из приведенных выше уравнений (21)-(23) следует, что электрический угол θmf вектора подвижного магнитного поля (вращающегося магнитного поля) относительно катушки индуктивности U-фазы выражается следующим уравнением (24), а электрическая угловая скорость ωmf подвижного магнитного поля относительно катушки индуктивности U-фазы выражается следующим уравнением (25):


В случае, когда ряд якорей так же, как и вторая структура, выполнен неподвижным, механическая мощность (движущая сила) W, вырабатываемая на первой и третьей структурах, в результате протекания токов Iu-Iw через катушки индуктивности соответственно U-W-фаз, выражается, за исключением участка с магнитным сопротивлением, следующим уравнением (26):

При преобразовании этого уравнения (26) путем подстановки уравнений (18)-(23) получается следующее уравнение (27):

Соотношение между этой механической мощностью W, вращающим моментом Т1, передаваемым на первую структуру через посредство магнитных полюсов (именуемым далее "первым вращающим моментом Т1"), вращающим моментом Т2, передаваемым на третьего структуру через посредство элементов из магнитомягкого материала (именуемым далее "вторым вращающим моментом Т2"), электрической угловой скоростью ωe1 первой структуры и электрической угловой скоростью ωе2 третьей структуры выражается следующим уравнением (28):

Как следует из приведенных выше уравнений (27) и (28), первый и второй вращающие моменты Т1 и Т2 выражаются следующими уравнениями (29) и (30):


Если считать, что вращающий момент, эквивалентный электрической мощности, подводимой к ряду якорей, и электрической угловой скорости ωmf подвижных магнитных полей, является эквивалентным вращающим моментом Те привода, то так как электрическая мощность, подведенная к ряду якорей, и механическая мощность W равны одна другой (при условии пренебрежения потерями), из уравнения (28) получается эквивалентный вращающий момент Те привода, выражаемый следующим уравнением (31):

Из приведенных выше уравнений (29)-(31) получается следующее уравнение (32):

Соотношение между вращающими моментами, выражаемое уравнением (32), и соотношение между электрическими угловыми скоростями, выражаемое приведенным выше уравнением (25), являются абсолютно такими же, как и соотношение между скоростями вращения и соотношение между вращающими моментами на солнечном зубчатом колесе, на зубчатом венце и на водиле планетарного механизма. При этом такое соотношение между электрическими угловыми скоростями и такое соотношение между вращающими моментами не ограничиваются только описываемым выше случаем неподвижной второй структуры, но выполняются также и при всех условиях, касающихся подвижности структур с первой по третью. Например, указанные выше соотношения выполняются также и в случае, когда вторая структура выполнена с возможностью движения, и электрическая мощность подводится в состоянии, при котором движущая сила прикладывается ко второй структуре, а также в случае, когда помимо второй структуры неподвижной выполнена первая или третья структура, и электрическая мощность подводится к ряду якорей в состоянии, при котором движущая сила прикладывается к первой или третьей структуре. Кроме того, эти соотношения выполняются также в случае, когда вторая структура выполнена с возможностью движения, а первая и/или третья структура(ы) выполнена неподвижной и электрическая мощность подводится в состоянии, при котором движущая сила прикладывается к первой и/или третьей структуре(ам).
Как указывалось выше, при условии, что b=а+с, и а-с≠0, выполняются соотношение между электрическими угловыми скоростями, выражаемое уравнением (25), и соотношение между вращающими моментами, выражаемое уравнением (32). Если положить, что число магнитных полюсов равно р, а число магнитных полюсов якорей - q, то указанное выше условие b=а+с будет иметь выражение b=(p+q)/2, то есть b/q=(1+p/q)/2. При этом, если положить, что p/q=m, то получится выражение b/q=(1+m)/2, и выполнение приведенного выше условия b=а+с будет означать, что соотношение между числом магнитных полюсов якорей, числом магнитных полюсов и числом элементов из магнитомягкого материала выразится пропорцией 1:m:(1+m)/2. А выполнение приведенного выше условия а-с≠0 будет означать, что m≠1,0. Так как в электродвигателе согласно настоящему изобретению в пределах определенного участка вдоль определенного направления соотношение между числом магнитных полюсов якорей, числом магнитных полюсов и числом элементов из магнитомягкого материала задается пропорцией 1:m:(1+m)/2 (m≠1,0), то выполняются соотношение между электрическими угловыми скоростями, выражаемое уравнением (25), и соотношение между вращающими моментами, выражаемое уравнением (32), что свидетельствует о том, что электродвигатель работает должным образом.
В отличие от традиционного электродвигателя, рассмотренного выше, электродвигатель согласно изобретению может работать даже при одном ряде элементов из магнитомягкого материала, что позволяет уменьшить размеры и снизить стоимость изготовления электродвигателя. Кроме того, как следует из уравнений (25) и (32), задание α=а/с, то есть отношения числа пар магнитных полюсов к числу пар магнитных полюсов якорей обеспечивает возможность свободного задания соотношения между электрическими угловыми скоростями подвижных магнитных полей второй и третьей структур, а также соотношения между вращающими моментами структур с первой по третью и, следовательно, возможность увеличения степени свободы при проектировании электродвигателя. Такие же полезные эффекты можно получить и в случае, когда число фаз катушек индуктивности совокупности якорей отличается от рассматриваемых выше 3, а также в случае, когда электродвигатель является не вращающейся машиной, а линейным двигателем. При этом в случае линейного двигателя обеспечивается свободное задание соотношения не между "вращающими моментами", а между "тяговыми усилиями".
В п.2 формулы изобретения электродвигатель 1, 31 по п.1 дополнительно содержит средство измерения относительного взаимоположения (первый датчик 21 угла поворота, второй датчик 22 угла поворота, преобразователь 16b электрического угла, датчик 41 положения) для измерения относительного взаимоположения структур с первой по третью и средство управления (ECU 16) для управления подвижными магнитными полями на основе измеренного относительного взаимоположения между структурами с первой по третью.
При такой конструкции средство измерения относительного взаимоположения измеряет относительное взаимоположение между структурами с первой по третью, а средство управления управляет подвижными магнитными полями на основе измеренного относительного взаимоположения между структурами с первой по третью. Это позволяет должным образом генерировать магнитные силовые линии между магнитными полюсами, элементами из магнитомягкого материала и магнитными полюсами якорей и обеспечивать, таким образом, возможность должного действия магнитных сил в направлении магнитных силовых линий и, следовательно, возможность обеспечения надежной работы электродвигателя.
В п.3 формулы изобретения в электродвигателе 1, 31 по п.2 средство измерения относительного взаимоположения (первый датчик 21 угла поворота, второй датчик 22 угла поворота, преобразователь 16b электрического угла) измеряет в качестве относительного взаимоположения структур с первой по третью электрические углы первой структуры и третьей структуры относительно второй структуры, а средство управления управляет подвижными магнитными полями на основе разности между значением, полученным в результате умножения измеренного электрического угла (второго электрического угла θER2 ротора) третьей структуры на (1+m), и значением, полученным в результате умножения измеренного электрического угла (электрического угла θER1 первого ротора) первой структуры на m.
При такой конструкции управление подвижными магнитными полями осуществляется на основе разности между значением, полученным в результате умножения измеренного электрического угла третьей структуры относительно второй структуры на (1+m), и значением, полученным в результате умножения измеренного электрического угла первой структуры относительно второй структуры на m. Как следует из п.1, m представляет собой отношение числа магнитных полюсов к числу магнитных полюсов якорей. Как указывалось выше, в процессе работы электродвигателя по п.1 соотношение между электрическим углом подвижных магнитных полей и электрическими углами второй и третьей структур выражается уравнением (24). В уравнении (24) α представляет собой отношение (а/с) числа пар магнитных полюсов к числу пар магнитных полюсов якорей, то есть отношение числа магнитных полюсов к числу магнитных полюсов якорей, равное m. Поэтому описываемая выше конструкция позволяет обеспечить более надежную работу электродвигателя.
В п.4 формулы изобретения в электродвигателе 1, 31 по любому из п.п.1-3 магнитные полюса являются магнитными полюсами постоянных магнитов 4а, 34а.
При такой конструкции использование в качестве магнитных полюсов полюсов постоянных магнитов в отличие от случая использования магнитных полюсов электромагнитов позволяет обойтись без электрических схем и катушек индуктивности для подвода электрической мощности к электромагнитам. Это позволяет также уменьшить размеры электродвигателя и упростить его конструкцию. Кроме того, например, в случае, когда первая структура, имеющая магнитные полюса, выполнена с возможностью вращения, то при использовании в качестве магнитных полюсов полюсов электромагнитов можно обойтись без токосъемного кольца для подвода электрической мощности к электромагнитам, что обеспечивает возможность уменьшения размеров электродвигателя и возможность повышения его эффективности.
В п.5 формулы изобретения электродвигатель 1 по п.1 является вращающейся машиной.
При такой конструкции обеспечивается возможность получения полезных эффектов, описываемых применительно к электродвигателю по п.1, и для вращающейся машины.
В п.6 формулы изобретения электродвигатель 31 по п.1 является линейным двигателем.
При такой конструкции обеспечивается возможность получения полезных эффектов, описываемых применительно к электродвигателю по п.1, и для линейного двигателя.
Краткое описание чертежей
Фиг.1 - схематический вид сечения электродвигателя согласно первому примеру осуществления настоящего изобретения.
Фиг.2 - блок-схема электродвигателя, представленного на фиг.1, и ECU (электронного блока управления).
Фиг.3 - схематический вид статора, а также первого и второго роторов электродвигателя, представленного на фиг.1, в развернутом в окружном направлении состоянии.
Фиг.4 - схематический коллинеарный график, иллюстрирующий пример соотношения между электрической угловой скоростью магнитных полей и электрическими угловыми скоростями первого и второго роторов электродвигателя, представленного на фиг.1.
Фиг.5 - схематический вид электродвигателя, представленного на фиг.1, иллюстрирующий работу электродвигателя в случае подвода электрической мощности к статору при неподвижном состоянии первого ротора.
Фиг.6 - схематический вид электродвигателя, являющийся продолжением иллюстрации фиг.5.
Фиг.7 - схематический вид электродвигателя, являющийся продолжением иллюстрации фиг.6.
Фиг.8 - схематический вид электродвигателя, иллюстрирующий взаимоположение между магнитные полюсами якорей и сердечниками после поворота магнитных полюсов якорей на угол 2π из состояния, показанного на фиг.5.
Фиг.9 - схематический вид электродвигателя, иллюстрирующий работу электродвигателя, представленного на фиг.1, в случае подвода электрической мощности к статору при неподвижном состоянии второго ротора.
Фиг.10 - схематический вид электродвигателя, являющийся продолжением иллюстрации фиг.9.
Фиг.11 - схематический вид электродвигателя, являющийся продолжением иллюстрации фиг.10.
Фиг.12 - схематический график, иллюстрирующий пример изменений напряжений противоЭДС U-W-фаз в случае неподвижного состояния первого ротора электродвигателя согласно настоящему изобретению.
Фиг.13 - схематический график, иллюстрирующий пример изменений эквивалентного вращающего момента привода, а также вращающих моментов передачи первого и второго роторов в случае неподвижного первого ротора электродвигателя согласно настоящему изобретению.
Фиг.14 - схематический график, иллюстрирующий пример изменений напряжений противоЭДС U-W-фаз в случае неподвижного второго ротора электродвигателя согласно настоящему изобретению.
Фиг.15 - схематический график, иллюстрирующий пример изменений эквивалентного вращающего момента привода, а также вращающих моментов передачи первого и второго роторов в случае неподвижного второго ротора электродвигателя согласно настоящему изобретению.
Фиг.16 - схематический вид спереди электродвигателя согласно второму примеру осуществления настоящего изобретения и функциональных блоков, обеспечивающих работу этого электродвигателя.
Фиг.17 - схематический вид сверху электродвигателя, представленного на фиг.16.
Фиг.18 - схематический вид электродвигателя, представленного на фиг.16, иллюстрирующий соотношение между числами магнитных полюсов якорей, сердечников и магнитных полюсов электродвигателя.
Фиг.19 - схематический вид эквивалентной схемы электродвигателя согласно настоящему изобретению.
Лучший вариант осуществления изобретения
Ниже приводится подробное описание настоящего изобретения, сопровождаемое ссылками на чертежи, иллюстрирующий предпочтительный пример осуществления этого изобретения. На фиг.1 представлен электродвигатель 1 согласно первому примеру осуществления настоящего изобретения. Электродвигатель 1 выполнен в виде вращающейся машины, работой которой управляет ECU 16, показанный на фиг.2. Как показано на фиг.1, электродвигатель 1 состоит из стационарного корпуса 2, статора 3, установленного внутри корпуса 2, первого ротора 4, установленного внутри корпуса 2 напротив статора 3, второго ротора 5, установленного между статором 3 и первым ротором 4, первого вращающегося вала 6 и второго вращающегося вала 7. При этом для удобства пользования иллюстрацией некоторые из элементов на фиг.1, такие как первый вращающийся вал 6 и др., показаны схематически. Кроме того, опущена штриховка сечений на фиг.1 и других фигурах, рассматриваемых ниже.
Корпус 2 включает в себя полую цилиндрическую окружную стенку 2а и пару дискообразных боковых стенок 2b и 2с, установленных на противоположных концах окружной стенки 2а, образующих единую конструкцию. В центре этих боковых стенок 2b и 2с имеются соответствующие установочные отверстия 2d и 2е, в которых установлены соответствующие подшипники 8 и 9.
Указанные выше первый и второй вращающиеся валы 6 и 7 поддерживаются с помощью соответствующих подшипников 8 и 9 с возможностью свободного вращения и размещены концентрически один относительно другого. Часть и первого, и второго вращающихся валов 6 и 7 располагается внутри корпуса 2, а их остальная часть выступает наружу из корпуса 2. Указанные выше статор 3, второй ротор 5 и первый ротор 4 размещены концентрически один относительно другого в направлении радиуса первого вращающегося вала 6 (что далее именуется просто "в радиальном направлении" или "радиально") и выстроены в указанном порядке, начиная с наружной стороны.
Статор 3 предназначен для генерирования вращающихся магнитных полей и, как показано на фиг.3, включает в себя железный сердечник 3а и катушки 3с, 3d и 3е индуктивности соответственно U-фазы, V-фазы и W-фазы, установленные на железном сердечнике 3а. При этом на фиг.1 для удобства показана только катушка 3с индуктивности U-фазы. Железный сердечник 3а, имеющий форму полого цилиндра, набранного из стальных пластин, проходит в направлении оси первого вращающегося вала 6 (что далее именуется просто "в осевом направлении" или "по оси") и установлен на внутренней окружной поверхности окружной стенки 2а корпуса 2. На внутренней окружной поверхности железного сердечника 3а имеется двенадцать пазов 3b. Пазы 3b проходят в осевом направлении и выстроены с одинаковыми зазорами один относительно другого в окружном направлении первого вращающегося вала 6 (что далее именуется просто "в окружном направлении" или "по окружности"). Катушки 3с-3е индуктивности U-W-фаз намотаны в пазах 3b в виде распределенной обмотки (в виде волновой обмотки) и соединены с регулируемым источником 15 мощности (см. фиг.2). Регулируемый источник 15 мощности, являющийся комбинацией электрической схемы, содержащей инвертор, и батареи, соединен с ECU 16.
В статоре 3, имеющем описываемую выше конструкцию, при подводе электрической мощности от регулируемого источника мощности 15, на конце железного сердечника 3а со стороны первого ротора 4 с одинаковыми зазорами один относительно другого в окружном направлении генерируется четыре магнитных полюса (см. фиг.5), и обусловленные этими магнитными полюсами вращающиеся магнитные поля вращаются в окружном направлении. Далее магнитные полюса, генерируемые на железном сердечнике 3а, именуются "магнитными полюсами якорей". Кроме того, каждые два магнитных полюса якорей, расположенные в окружном направлении один рядом с другим, имеют полярности, отличающиеся одна от другой. При этом на фиг.5 и других фигурах, рассматриваемых ниже, магнитные полюса якорей обозначены на железном сердечнике 3а и катушках 3с-3е индуктивности U-Wфаз буквами (N) и (S).
Как показано на фиг.3, первый ротор 4 включает в себя ряд магнитных полюсов, состоящий из восьми постоянных магнитов 4а. Эти постоянные магниты 4а выстроены с одинаковыми зазорами один относительно другого в окружном направлении, причем ряд магнитных полюсов располагается напротив железного сердечника 3а. Каждый постоянный магнит 4а проходит в осевом направлении, а его длина в осевом направлении задана равной длине железного сердечника 3а статора 3.
Постоянные магниты 4а установлены на внешней окружной поверхности кольцеобразного фиксатора 4b. Этот кольцеобразный фиксатор 4b набран из элементов из магнитомягкого материала, такого как железо, или из стальных пластин, причем своей внутренней окружной поверхностью этот фиксатор 4b закреплен на внешней окружной поверхности дискообразного фланца 4с, образующего единую концентрическую конструкцию с первым вращающимся валом 6. Это обеспечивает возможность свободного вращения первого ротора 4, включающего в себя постоянные магниты 4а, как единой конструкции с первым вращающимся валом 6. Кроме того, так как постоянные магниты 4а, как указывалось выше, закреплены на внешней окружной поверхности кольцеобразного фиксатора 4b, образованного элементами из магнитомягкого материала, то на конце каждого постоянного магнита 4а со стороны статора 3 появляется магнитный полюс (N) или (S). При этом на фиг.3 и других фигурах, рассматриваемых ниже, магнитные полюса постоянных магнитов 4а обозначены буквами (N) и (S). Каждые два постоянных магнита 4а, расположенные в окружном направлении один рядом с другим, имеют полярности, отличающиеся одна от другой.
Второй ротор 5 включает в себя ряд элементов из магнитомягкого материала, состоящий из шести сердечников 5а. Эти сердечники 5а выстроены с одинаковыми зазорами один относительно другого в окружном направлении, причем ряд элементов из магнитомягкого материала размещается между железным сердечником 3а статора 3 и первым ротором 4 с определенными зазорами от одного и другого. Каждый сердечник 5а набран из элементов из магнитомягкого материала, таких как стальные пластины, и проходит в осевом направлении. Кроме того, так же, как и у постоянного магнита 4а, длина сердечника 5а в осевом направлении задана равной длине железного сердечника 3а статора 3. Через посредство полого цилиндрического соединительного элемента 5с, проходящего на небольшое расстояние в осевом направлении, сердечник 5а закреплен на внешнем конце дискообразного фланца 5b. Фланец 5b образует единую концентрическую конструкцию со вторым вращающимся валом 7. Это обеспечивает возможность свободного вращения второго ротора 5, включающего в себя сердечники 5а, как единой конструкции со вторым вращающимся валом 7. На фиг.3 соединительный элемент 5с и фланец 5b для удобства опущены.
Кроме того, как показано на фиг.2, электродвигатель 1 снабжен первым датчиком 21 угла поворота и вторым датчиком 22 угла поворота, каждый из которых является датчиком магнитоиндукционного типа. Первый датчик 21 угла поворота измеряет угол поворота отдельно взятого постоянного магнита 4а первого ротора 4 (именуемый далее "углом θR1 поворота первого ротора") относительно отдельно взятой катушки индуктивности U-фазы 3с статора 3 (именуемой далее "эталонной катушкой индуктивности"), и вырабатывает сигнал, характеризующий измеренный угол θR1 поворота первого ротора, поступающий в ECU 16. Указанный выше второй датчик 22 угла поворота измеряет угол поворота отдельно взятого сердечника 5а второго ротора 5 относительно эталонной катушки индуктивности (именуемый далее "углом θR2 поворота второго ротора") и вырабатывает сигнал, характеризующий измеренный угол θR2 поворота второго ротора, поступающий в ECU 16.
Кроме того, электродвигатель 1 снабжен первым датчиком 23 тока и вторым датчиком 24 тока. Первый и второй датчики 23 и 24 тока измеряют токи, протекающие через соответствующие катушки 3с и 3d индуктивности соответственно U-фазы и V-фазы (именуемые далее соответственно "током Iu U-фазы" и "током Iv V-фазы"), и вырабатывают сигналы, характеризующие соответственно измеренные ток Iu U-фазы и ток Iv V-фазы, поступающие в ECU 16.
ECU 16, реализованный в виде микрокомпьютера, содержащего интерфейс ввода/вывода, CPU (центральный процессор), RAM (оперативное запоминающее устройство) и ROM (постоянное запоминающее устройство), управляет работой электродвигателя 1 на основе сигналов измерений, поступающих от указанных выше датчиков 21-24.
При этом в рассматриваемом примере осуществления постоянные магниты 4а соответствуют магнитным полюсам в настоящем изобретении, а первый ротор 4 и первый вращающийся вал 6 соответствуют первой структуре в настоящем изобретении. Железный сердечник 3а и катушки 3с-3е индуктивности U-W-фаз соответствуют якорям в настоящем изобретении, а статор 3 соответствует второй структуре в настоящем изобретении. Сердечники 5а соответствуют элементам из магнитомягкого материала в настоящем изобретении, а второй ротор 5 и второй вращающийся вал 7 соответствуют третьей структуре в настоящем изобретении. ECU 16 соответствует средству управления в настоящем изобретении, а первый и второй датчики 21 и 22 угла поворота 21 и 22 соответствуют средствам измерения относительного взаимоположения в настоящем изобретении.
Как указывалось выше, электродвигатель 1 включает в себя четыре магнитных полюса якорей, восемь магнитных полюсов постоянных магнитов 4а (именуемых далее "магнитными полюсами магнитов") и шесть сердечников 5а. Таким образом, соотношение между числом магнитных полюсов якорей, числом магнитных полюсов магнитов и числом сердечников 5а (именуемое далее "соотношением чисел полюсов") задается пропорцией 1:2,0:(1+2,0)/2. Как следует из этой пропорции и приведенных выше уравнений (18)-(20), напряжения противоЭДС, генерируемые катушками 3с-3е индуктивности U-W-фаз при вращении первого ротора 4 и второго ротора 5 относительно статора 3 (именуемые далее соответственно "напряжением Vcu противоЭДМ U-фазы", "напряжением Vcv противоЭДС V-фазы" и "напряжением Vcw противоЭДС W-фазы"), выражаются следующими уравнениями (33), (34) и (35):
В этих уравнениях I представляет собой амплитуду (максимальное значение) тока, протекающего по катушкам 3с-3е индуктивности U-W-фаз, a ψF - максимальное значение магнитных потоков магнитных полюсов магнитов. θER1 представляет собой значение, полученное в результате преобразования угла θR1 поворота первого ротора в качестве так называемого механического угла в электрический угол (именуемый далее "электрическим углом первого ротора"), то есть значение, полученное в результате умножения угла θR1 поворота первого ротора на число пар магнитных полюсов якорей, то есть на 2. θER2 представляет собой значение, полученное в результате преобразования угла θR2 поворота второго ротора в качестве механического угла в электрический угол (именуемый далее "электрическим углом второго ротора"), то есть значение, полученное в результате умножения угла θR2 поворота второго ротора на число (2) пар магнитных полюсов якорей. ωER1 представляет собой значение, полученное в результате дифференцирования θER1 по времени, то есть значение, полученное в результате преобразования угловой скорости первого ротора 4 относительно статора 3 в электрическую угловую скорость (именуемую далее "электрической угловой скоростью первого ротора"). ωER2 представляет собой значение, полученное в результате дифференцирования θER2 по времени, то есть значение, полученное в результате преобразования угловой скорости второго ротора 5 относительно статора 3 в электрическую угловую скорость (именуемую далее "электрической угловой скоростью второго ротора").
Как следует из приведенного выше соотношения чисел полюсов и приведенных выше уравнений (21)-(23), ток Iu U-фазы, ток Iv V-фазы и ток (именуемый далее "током Iw W-фазы"), протекающий по катушке 3е индуктивности W-фазы, выражаются соответственно следующими уравнениями (36), (37) и (38):
Как следует из приведенного выше соотношения чисел полюсов и приведенных выше уравнений (24) и (25), электрический угол вектора вращающихся магнитных полей статора 3 относительно эталонной катушки индуктивности (именуемый далее "электрическим углом θMFR магнитных полей") выражается следующим уравнением (39), а электрическая угловая скорость вращающихся магнитных полей относительно статора 3 (именуемая далее "электрической угловой скоростью ωMFR магнитных полей") выражается следующим уравнением (40):


Поэтому в случае, когда соотношение между электрической угловой скоростью ωMFR магнитных полей, электрической угловой скоростью ωER1 первого ротора и электрической угловой скоростью ωER2 второго ротора выражается так называемым коллинеарным графиком, это соотношение отображается, например, как на фиг.4.
Кроме того, если считать, что вращающий момент, эквивалентный электрической мощности, подводимой к статору 3, и электрической угловой скорости ωMFR магнитных полей, является эквивалентным вращающим моментом TSE привода, то, как следует из приведенного выше соотношения чисел полюсов и приведенного выше уравнения (32), соотношение между эквивалентным вращающим моментом TSE привода, вращающим моментом TR1, передаваемым на первый ротор 4 (именуемым далее "вращающим моментом TR1 передачи первого ротора"), и вращающим моментом TR2, передаваемым на второй ротор 5 (именуемым далее "вращающим моментом TR2 передачи второго ротора"), выражается следующим уравнением (41):

Соотношение между электрическими угловыми скоростями, выражаемое уравнением (40), и соотношение между вращающими моментами, выражаемое уравнением (41), являются абсолютно такими же, как и соотношение между скоростями вращения и соотношение между вращающими моментами на солнечном зубчатом колесе, на зубчатом венце и на водиле планетарного механизма, передаточное отношение между солнечным зубчатым колесом и зубчатым венцом которого задается пропорцией 1:2.
ECU 16 управляет прохождением тока по катушкам 3с-3е индуктивности U-W-фаз на основе приведенного выше уравнения (39) и, таким образом, управляет вращающимися магнитными полями. В частности, ECU 16, включающий в себя, как показано на фиг.2, блок 16а вычисления целевого тока, преобразователь 16b электрического угла, преобразователь 16с координат тока, блок 16d вычисления разности, регулятор тока 16е и преобразователь 16f координат напряжения, обеспечивает регулирование токов Iu, Iv и Iw U-W-фаз по так называемому методу векторного управления и, таким образом, управляет вращающимися магнитными полями. При этом в рассматриваемом примере осуществления преобразователь 16b электрического угла соответствует средству измерения относительного взаимоположения.
Блок 16а вычисления целевого тока вычисляет соответствующие целевые значения тока Id по оси d и тока Iq по оси q (именуемые далее соответственно "целевым током Id_tar по оси d и целевым током Iq_tar по оси q"), рассматриваемые ниже, и подает полученные в результате вычислений целевой ток Id по оси d и целевой ток Iq по оси q в блок 16d вычисления разности. При этом целевой ток Id_tar по оси d и целевой ток Iq_tar по оси q вычисляются, например, в соответствии с нагрузкой на электродвигателе 1.
В преобразователь 16b электрического угла вводятся углы θR1 и θR2 поворота первого и второго роторов, измеренные первым и вторым датчиками 21 и 22 угла поворота. Преобразователь 16b электрического угла вычисляет электрические углы θER1 и θER2 первого и второго роторов путем умножения введенных углов θR1 и θR2 поворота первого и второго роторов на число (2) пар магнитных полюсов якорей и подает полученные в результате вычислений электрические углы θER1 и θER2 первого и второго роторов в преобразователь 16с координат тока и преобразователь 16f координат напряжения.
Помимо электрических углов θER1 и θER2 первого и второго роторов в преобразователь 16с координат тока вводятся токи Iu и Iv соответственно U-фазы и V-фазы, измеренные соответственно первым и вторым датчиками 23 и 24 тока. На основе введенных токов Iu и Iv соответственно U-фазы и V-фазы и электрических углов θe1 и θе2 первого и второго роторов преобразователь 16с координат тока преобразует протекающие токи Iu-Iw U-W-фаз в трехфазной системе координат переменного тока в ток Id по оси d и ток Iq по оси q в системе координат dq. Эта система координат dq, в которой осью d является (3·θER2-2·θER1), а осью с - ось, ортогональная оси d, вращается со скоростью (3·ωER2-2·ωER1). В частности, ток Id по оси d и ток Iq по оси q вычисляются по следующему уравнению (42):
Полученные в результате вычислений ток Id по оси d и ток Iq по оси q вводятся преобразователем координат 16с тока в блок 16d вычисления разности.
Блок 16d вычисления разности вычисляет разность между введенными целевым током Id_tar по оси d и током Id по оси d (именуемую далее "разностью dId токов по оси d") и разность между введенными целевым током Iq_tar по оси q и током Iq по оси q (именуемую далее "разностью dIq токов по оси q"). Полученные в результате вычислений разности dId и dIq токов блок 16d вычисления разности подает в регулятор 16е тока.
На основе введенных разности dId токов по оси d и разности dIq токов по оси q с помощью определенного алгоритма управления с обратной связью, например, PI (пропорционально-интегрального) алгоритма управления, регулятор 16е тока вычисляет напряжение Vd по оси d и напряжение Vq по оси q. В результате, вычисление напряжения Vd по оси d осуществляется таким образом, что ток Id по оси d становится равным целевому току Id_tar по оси d, а вычисление напряжения Vq по оси q осуществляется таким образом, что ток Iq по оси q становится равным целевому току Iq_tar по оси q. Полученные в результате вычислений напряжения Vd и Vq соответственно по оси d и по оси q регулятор 16е тока подает в преобразователь 16f координат напряжения.
На основе введенных электрических углов θER1 и θER2 первого и второго роторов преобразователь 16f координат напряжения преобразует введенные напряжение Vd по оси d и напряжение Vq по оси q в значения команд напряжений Vu, Vv, и Vw U-W-фаз в трехфазной системе координат переменного тока (именуемые далее "значением Vu_cmd команды напряжения U-фазы", "значением Vv_cmd команды напряжения V-фазы" и "значением Vw_cmd команды напряжения W-фазы"). В частности, значения Vu_cmd-Vw_cmd команд напряжений U-W-фаз вычисляются по следующему уравнению (43):
Полученные в результате вычислений значения Vu_cmd-Vw_cmd команд напряжений U-W-фаз преобразователь 16f координат напряжения подает в указанный выше регулируемый источник 15 мощности.
При этом напряжения Vu-Vw U-W-фаз, прикладываемые регулируемым источником 15 мощности к электродвигателю, становятся равными соответствующим значениям Vu_cmd-Vw_cmd команд напряжений U-W-фаз, за счет чего обеспечивается регулирование токов Iu-Iw U-W-фаз. В этом случае эти токи Iu-Iw выражаются приведенными выше соответствующими уравнениями (36)-(38). Причем амплитуда I электрического тока определяется на основе целевого тока Id_tar по оси d и целевого тока Iq_tar по оси q.
Описываемый выше процесс управления с помощью ECU 16 обеспечивает возможность такого регулирования электрического угла θMFR магнитных полей, при котором выполняется приведенное выше уравнение (39), и возможность такого регулирования электрической угловой скорости ωMFR магнитных полей, при котором выполняется приведенное выше уравнение (40).
Электродвигатель 1, имеющий описываемую выше конструкцию, используется, например, следующим образом. При неподвижном состоянии первого или второго ротора 4 или 5 или в состоянии, когда движущая сила прикладывается к одному из этих роторов, электрическая мощность, подведенная к статору 3, преобразуется в движущую силу и вырабатывается на другом из роторов. В состоянии же, когда движущая сила вырабатывается одновременно на первом и втором роторах 4 и 5, электродвигатель используется в качестве источника движущей силы такого устройства, как воздушные винты противоположного вращения, в котором вращающий момент нагрузки, удовлетворяющий уравнению (41), одновременно действует на первый и второй ротор 4 и 5.
Далее следует подробное описание процесса преобразования электрической мощности, подводимой к статору 3, в движущую силу, вырабатываемую на первом роторе 4 и втором роторе 5. Прежде всего, со ссылками на фиг.5-7 приводится описание случая подвода к статору 3 электрической мощности при неподвижном состоянии первого ротора 4. При этом номера позиций, характеризующих составные элементы электродвигателя, на фиг.5-7 для удобства опущены. Это относится и к другим фигурам, рассматриваемым ниже. Кроме того, один и тот же магнитный полюс якоря и один и тот же сердечник 5а на фиг.5-7 обозначены для ясности штриховкой.
Пусть, как показано на фиг.5(a), генерирование вращающихся магнитных полей, вращающихся на фиг.5(a) влево, начинается из состояния, при котором центр одного определенного сердечника 5а и центр одного определенного постоянного магнита 4а совмещены один с другим в окружном направлении, а центр каждого третьего сердечника 5а от этого одного определенного сердечника 5а совмещен в окружном направлении с центром каждого четвертого постоянного магнита 4а от этого одного определенного постоянного магнита 4а. На начальном этапе генерирования вращающихся магнитных полей положения каждых двух магнитных полюсов якорей, имеющих одну и ту же полярность, совмещены в окружном направлении с центрами постоянных магнитов 4а, центры которых совмещены с центрами сердечников 5а, а полярности этих магнитных полюсов якорей и этих магнитных полюсов постоянных магнитов 4а являются различными.
Как указывалось выше, вращающиеся магнитные поля генерируются с помощью статора 3 между статором 3 и первым ротором 4, а второй ротор 5, имеющий сердечники 5а, размещается между статором 3 и первым ротором 4, поэтому под действием магнитных полюсов якорей и магнитных полюсов магнитов каждый сердечник 5а подвергается намагничиванию. Это намагничивание, а также размещение каждых двух соседних сердечников 5а с зазором одного относительно другого обусловливают генерирование магнитных силовых линий ML, соединяющих магнитные полюса якорей, сердечники 5а и магнитные полюса магнитов одни с другими. При этом магнитные силовые линии ML железного сердечника 3а и фиксатора 4b на фиг.5-7 для удобства опущены. Это относится и к другим фигурам, рассматриваемым ниже.
В состоянии, показанном на фиг.5(a), магнитные силовые линии ML генерируются таким образом, что соединяют магнитные полюса якорей, сердечники 5а и магнитные полюса магнитов, совмещенные одни с другими в окружном направлении, а также магнитные полюса якорей, сердечники 5а и магнитные полюса магнитов, расположенные в окружном направлении один рядом с другим с противоположных сторон указанных выше совмещенных одних с другими магнитных полюсов якорей, сердечников 5а и магнитных полюсов магнитов. Так как в этом состоянии магнитные силовые линии являются прямыми, то никакие магнитные силы, обеспечивающие возможность поворота сердечников 5а в окружном направлении, на сердечники 5а не действуют.
При повороте магнитных полюсов якорей из положения, показанного на фиг.5(a), в положение, показанное на фиг.5(b), вследствие вращения вращающихся магнитных полей магнитные силовые линии ML изгибаются, и в результате этого на сердечники 5а начинают действовать магнитные силы, обеспечивающие возможность выпрямления магнитных силовых линий ML. В этом случае изгибание магнитных силовых линий ML на сердечниках 5а происходит с образованием выпуклости в направлении, противоположном направлению вращения вращающихся магнитных полей (именуемому далее "направлением вращения магнитных полей"), относительно прямых линий, соединяющих магнитные полюса якорей и магнитные полюса, соединенные один с другим магнитными силовыми линиями ML, и поэтому указанные выше магнитные силы обеспечивают возможность привода сердечников 5а в движение в направлении вращения магнитных полей. Под действием магнитных сил в направлении таких магнитных силовых линий ML сердечники 5а приводятся в движение в направлении вращения магнитных полей и поворачиваются в положение, показанное на фиг.5(c), при котором второй ротор 5, снабженный сердечниками 5а, и второй вращающийся вал 7 также поворачиваются в направлении вращения магнитных полей. При этом штриховые линии на фиг.(5b) и 5(c) указывают на то, что количество магнитного потока магнитных силовых линий ML является чрезвычайно малым, и магнитная связь между магнитными полюсами якорей, сердечниками 5а и магнитными полюсами магнитов является слабой. Это относится и к другим фигурам, рассматриваемым ниже.
При дальнейшем вращении вращающихся магнитных полей последовательность описанных выше этапов, то есть "изгибание магнитных силовых линий ML на сердечниках 5а с образованием выпуклости в направлении, противоположном направлению вращения магнитных полей → возникновение магнитных сил, действующих на сердечники 5а и обеспечивающих возможность выпрямления магнитных силовых линий ML → поворот сердечников 5а, второго ротора 5 и второго вращающегося вала 7 в направлении вращения магнитных полей", как показано на фиг.6(a)-6(d) и фиг.7(a), 7(b), повторяется. Под действием магнитных сил в направлении таких указанных выше магнитных силовых линий ML электрическая мощность, подводимая к статору 3, преобразуется в движущую силу, вырабатываемую на втором вращающемся вале 7.
Фиг.8 иллюстрирует состояние, которое занимают магнитные полюса якорей после поворота из состояния, показанного на фиг.5(a), на электрический угол 2π. Из сравнения фиг.8 и фиг.5(a) следует, что при этом сердечники 5а поворачиваются в том же направлении на 1/3 угла поворота магнитных полюсов якорей. Это совпадает с результатом ωER2=ωMFR/3, получаемым при подстановке ωER1=0 в приведенное выше уравнение (40).
Далее следует описание работы электродвигателя в случае, когда электрическая мощность подводится к статору 3 при неподвижном состоянии второго ротора 5, сопровождаемое ссылками на фиг.9-11. При этом один и тот же магнитный полюс якоря и один и тот же постоянный магнит 4а на фиг.9-11 обозначены для ясности штриховкой. Пусть, как показано на фиг.9(a), генерирование вращающихся магнитных полей, вращающихся на фиг.9(a) влево, начинается так же, как и на фиг.5(a), из состояния, при котором центр одного определенного сердечника 5а и центр одного определенного постоянного магнита 4а совмещены один с другим в окружном направлении, а центр каждого третьего сердечника 5а от этого одного определенного сердечника 5а совмещен в окружном направлении с центром каждого четвертого постоянного магнита 4а от этого одного определенного постоянного магнита 4а. На начальном этапе генерирования вращающихся магнитных полей положения каждых двух магнитных полюсов якорей, имеющих одну и ту же полярность, совмещены в окружном направлении с центрами постоянных магнитов 4а, центры которых совмещены с центрами сердечников 5а, а полярности этих магнитных полюсов якорей и этих магнитных полюсов постоянных магнитов 4а являются различными.
В состоянии, показанном на фиг.9(a), так же, как и на фиг.5(a), магнитные силовые линии ML генерируются таким образом, что соединяют магнитные полюса якорей, сердечники 5а и магнитные полюса магнитов, совмещенные одни с другими в окружном направлении, а также магнитные полюса якорей, сердечники 5а и магнитные полюса магнитов, расположенные в окружном направлении один рядом с другим с противоположных сторон указанных выше совмещенных одних с другими магнитных полюсов якорей, сердечников 5а и магнитных полюсов магнитов. Так как в этом состоянии магнитные силовые линии являются прямыми, то никакие магнитные силы, обеспечивающие возможность поворота постоянных магнитов 4а в окружном направлении, на постоянные магниты 4а не действуют.
При повороте магнитных полюсов якорей из положения, показанного на фиг.9(a), в положение, показанное на фиг.9(b), вследствие вращения вращающихся магнитных полей магнитные силовые линии ML изгибаются, и в результате этого на постоянные магниты 4а начинают действовать магнитные силы, обеспечивающие возможность выпрямления магнитных силовых линий ML. В этом случае эти постоянные магниты 4а занимают опережающее положение относительно продолжения соответствующих магнитных силовых линий ML, соединяющих магнитные полюса якорей и сердечники 5а одни с другими, в направлении вращения магнитных полей, и поэтому указанные выше магнитные силы обеспечивают возможность расположения постоянных магнитов 4а на продолжении этих магнитных силовых линий, то есть возможность привода постоянных магнитов 4а в движение в направлении, противоположном направлению вращения магнитных полей. Под действием магнитных сил в направлении таких магнитных силовых линий ML постоянные магниты 4а приводятся в движение в направлении, противоположном направлению вращения магнитных полей, и поворачиваются в положение, показанное на фиг.9(c), при котором первый ротор 4, снабженный постоянными магнитами 4а, и первый вращающийся вал 6 также поворачиваются в направлении, противоположном направлению вращения магнитных полей.
При дальнейшем вращении вращающихся магнитных полей последовательность описанных выше этапов, то есть "изгибание магнитных силовых линий ML → занятие постоянными магнитами 4а опережающего положения относительно продолжения соответствующих магнитных линий ML, соединяющих магнитные полюса якорей и сердечники 5а, в направлении вращения магнитных полей → возникновение магнитных сил, действующих на постоянные магниты 4а и обеспечивающих возможность выпрямления магнитных силовых линий ML → поворот постоянных магнитов 4а, первого ротора 4 и первого вращающегося вала 6 в направлении, противоположном направлению вращения магнитных полей, как показано на фиг.10(a)-10(d) и фиг.11(a), 11(b) повторяется. Под действием магнитных сил в направлении таких указанных выше магнитных силовых линий ML электрическая мощность, подводимая к статору 3, преобразуется в движущую силу, вырабатываемую на первом вращающемся валу 6.
Фиг.11(b) иллюстрирует состояние, которое занимают магнитные полюса якорей после поворота из состояния, показанного на фиг.9(a), на электрический угол 2π. Из сравнения фиг.11(b) и фиг.9(a) следует, что при этом постоянные магниты 4а поворачиваются в противоположном направлении на 1/2 угла поворота магнитных полюсов якорей. Это совпадает с результатом -ωER1=ωMFR/2, получаемым при подстановке ωER2=0 в приведенное выше уравнение (40).
На фиг.12 и фиг.13 представлены результаты моделирования процесса управления, при котором число магнитных полюсов якорей, число сердечников 5а и число постоянных магнитов 4а заданы соответствующими цифрами 16, 18 и 20, первый ротор 4 является неподвижным, а на втором роторе 5 в результате подвода электрической мощности к статору 3 вырабатывается движущая сила. Фиг.12 иллюстрирует пример изменений напряжений Vcu-Vcw противоЭДС U-W-фаз за период времени изменения электрического угла θER2 второго ротора от 0 до 2π.
В этом случае, так как первый ротор 4 является неподвижным, а число пар магнитных полюсов якорей и число пар магнитных полюсов магнитов составляет соответственно 8 и 10, то при применении приведенного выше уравнения (25) соотношение между электрической угловой скоростью ωMFR магнитных полей и электрическими угловыми скоростями ωER1 и ωER2 первого и второго роторов приобретает вид ωMFR=2,25·ωER2. Как показано на фиг.12, за период времени изменения электрического угла θER2 второго ротора от 0 до 2π число периодов генерации напряжений Vcu-Vcw противоЭДС U-W-фаз составляет приблизительно 2,25. На фиг.12 также показаны изменения напряжений Vcu-Vcw противоЭДС U-W-фаз второго ротора 5. Как показано на фигуре с электрическим углом θER2 второго ротора в качестве горизонтальной оси, напряжения противоЭДС выстроены в порядке напряжение Vcw противоЭДС W-фазы, напряжение Vcv противоЭДС V-фазы и напряжение Vcu противоЭДС U-фазы. Это означает, что второй ротор 5 вращается в направлении вращения магнитных полей. Как показано выше, и представленные на фиг.12 результаты моделирования позволяют подтвердить выполнение выражения ωMFR=2,25·ωER2.
Фиг.13 иллюстрирует пример изменений эквивалентного вращающего момента TSE привода, а также вращающих моментов TR1 и TR2 передачи первого и второго роторов. Так как в этом случае число пар магнитных полюсов якорей и число пар магнитных полюсов магнитов составляет соответственно 8 и 10, то при применении приведенного выше уравнения (32) соотношение между эквивалентным вращающим моментом TSE привода и вращающими моментами TR1 и TR2 передачи первого и второго роторов приобретает вид TSE=TR1/1,25=-TR2/2,25. Как показано на фиг.13, эквивалентный вращающий момент TSE привода составляет приблизительно -TREF, вращающий момент TR1 передачи первого ротора - приблизительно 1,25·(-TREF), а вращающий момент TR2 передачи второго ротора - приблизительно 2,25·TREF. TREF - это определенное значение вращающего момента (например, 200 Нм). Таким образом, и представленные на фиг.13 результаты моделирования позволяют подтвердить выполнение выражения TSE=TR1/1,25=-TR2/2,25.
На фиг.14 и 15 представлены результаты моделирования процесса управления, при котором число магнитных полюсов якорей, число сердечников 5а и число постоянных магнитов 4а заданы такими же, как и в случае, иллюстрированном на фиг.12 и 13, второй ротор 5 является неподвижным, а на первом роторе 4 в результате подвода электрической мощности к статору 3 вырабатывается движущая сила. Фиг.14 иллюстрирует пример изменений напряжений Vcu-Vcw противоЭДС U-W-фаз за период времени изменения электрического угла θER1 первого ротора от 0 до 2π.
В этом случае, так как второй ротор 5 является неподвижным, а число пар магнитных полюсов якорей и число пар магнитных полюсов магнитов составляет соответственно 8 и 10, то при применении приведенного выше уравнения (25) соотношение между электрической угловой скоростью ωMFR магнитных полей и электрическими угловыми скоростями ωER1 и ωER2 первого и второго роторов приобретает вид ωMFR=-1,25·ωER1. Как показано на фиг.14, за период времени изменения электрического угла θER1 первого ротора от 0 до 2π число периодов генерации напряжений Vcu-Vcw противоЭДС U-W-фаз составляет приблизительно 1,25. На фиг.14 также показаны изменения напряжений Vcu-Vcw противоЭДС U-W-фаз первого ротора 4. Как показано на фигуре с электрическим углом θER1 первого ротора в качестве горизонтальной оси, напряжения противоЭДС выстроены в порядке напряжение напряжение Vcu противоЭДС U-фазы, напряжение Vcv противоЭДС V-фазы и Vcw противоЭДС W-фазы. Это означает, что первый ротор 4 вращается в направлении, противоположном направлению вращения магнитных полей. Как показано выше, и представленные на фиг.14 результаты моделирования позволяют подтвердить выполнение выражения ωMFR=-1,25·ωER1.
Фиг.15 иллюстрирует пример изменений эквивалентного вращающего момента TSE привода, а также вращающих моментов TR1 и TR2 передачи первого и второго роторов. В этом случае, как и в случае, иллюстрированном фиг.13, при применении приведенного выше уравнения (32) соотношение между эквивалентным вращающим моментом TSE привода и вращающими моментами TR1 и TR2 передачи первого и второго роторов приобретает вид TSE=TR1/1,25=-TR2/2,25. Как показано на фиг.15, эквивалентный вращающий момент TSE привода составляет приблизительно TREF, вращающий момент TR1 передачи первого ротора - приблизительно 1,25·TREF, а вращающий момент TR2 передачи второго ротора - приблизительно -2,25·TREF. TREF - это определенное значение вращающего момента (например, 200 Нм). Таким образом, и представленные на фиг.15 результаты моделирования позволяют подтвердить выполнение выражения TSE=TR1/1,25=-TR2/2,25.
Как показано выше, согласно рассматриваемому примеру осуществления электродвигатель 1 может работать даже при одном ряде элементов из магнитомягкого материала, образованном сердечниками 5а, что позволяет уменьшить размеры и снизить стоимость изготовления электродвигателя 1. А задание отношения числа пар магнитных полюсов магнитов к числу пар магнитных полюсов якорей обеспечивает возможность свободного задания соотношения между электрической угловой скоростью ωMFR подвижных магнитных полей и электрическими угловыми скоростями ωER1 и ωER2 первого и второго роторов, а также соотношения между эквивалентным вращающим моментом TSE привода и вращающими моментами TR1 и TR2 передачи первого и второго роторов и, следовательно, возможность увеличения степени свободы при проектировании электродвигателя 1.
Регулирование же электрического угла θMFR магнитных полей, удовлетворяющее приведенному выше уравнению (40), позволяет обеспечить надежную работу электродвигателя 1. А использование в качестве магнитных полюсов магнитов полюсов постоянных магнитов 4а в отличие от случая использования магнитных полюсов электромагнитов позволяет обойтись без электрических схем и катушек индуктивности для подвода электрической мощности к электромагнитам, что ведет к дальнейшему уменьшению размеров электродвигателя 1 и упрощению его конструкции. Кроме того, при использовании в качестве магнитных полюсов магнитов полюсов электромагнитов можно обойтись без токосъемного кольца для подвода электрической мощности к электромагнитам, что обеспечивает возможность уменьшения размеров электродвигателя 1 и возможность повышения его эффективности.
В рассмотренном выше первом примере осуществления первый и второй роторы 4 и 5 выполнены с возможностью свободного вращения, однако изобретение не ограничивается такой конструкцией, и один из роторов 4 и 5 может быть выполнен невращающимся, а другой - с возможностью свободного вращения, и на нем может вырабатываться движущая сила. Так как в этом случае один из роторов 4 и 5 выполнен невращающимся, то, как следует из приведенного выше уравнения (39), электрический угол одного из роторов 4 и 5 становится равным 0, и управление вращающимися магнитными полями может осуществляться в соответствии только с электрическим углом другого ротора, измеряемого, например, датчиком. С возможностью свободного вращения может быть выполнен и статор 3. В этом случае электродвигатель используется, например, следующим образом. В состоянии, когда движущая сила прикладывается к одному из роторов 4 и 5 и статору 3, электрическая мощность, поведенная к статору 3, преобразуется в движущую силу и вырабатывается на другом из роторов 4 и 5. При неподвижном же состоянии первого или второго ротора 4 или 5 (или в состоянии, когда движущая сила прикладывается к одному из этих роторов) движущая сила вырабатывается одновременно на статоре 3 и другом из роторов 4, 5, и электродвигатель используется в качестве источника движущей силы такого устройства, как воздушные винты противоположного вращения, в котором вращающий момент нагрузки, удовлетворяющий уравнению (41), одновременно действует на статор 3 и другой из роторов 4 и 5.
Кроме того, в первом примере осуществления в качестве углов θR1 и θR2 поворота первого и второго роторов измеряются соответственно угол поворота отдельно взятого постоянного магнита 4а и угол поворота отдельно взятого сердечника 5а относительно эталонной катушки индуктивности, то есть относительно отдельно взятой катушки 3с U-фазы. В случае же, если углы поворота первого и второго роторов 4 и 5 относительно статора 3 могут быть выражены через углы поворота других составных частей конструкции, то измеряются углы поворота этих составных частей конструкции. Например, в качестве углов θR1 и θR2 поворота первого и второго роторов могут быть измерены соответственно угол поворота отдельно взятого участка фиксатора 4b или первого вращающегося вала 6 и угол поворота отдельно взятого участка фланца 5b или второго вращающегося вала 7 относительно отдельно взятой катушки 3d V-фазы, отдельно взятой катушки 3е W-фазы или отдельно взятой части корпуса 2.
Кроме того, в первом примере осуществления электрический угол θMFR магнитных полей, используемый при управлении вращающимися магнитными полями, вычисляется по уравнению (39) с использованием углов поворота θR1 и θR2 первого и второго роторов, измеренных первым и вторым датчиками 21 и 22 угла поворота. Однако вычисление электрического угла θMFR магнитных полей может быть осуществлено и способом, предложенным в заявке №2007-280916 на патент Японии. В частности, берут планетарный механизм, у которого передаточное отношение между солнечным зубчатым колесом и зубчатым венцом совпадает с отношением между числом магнитных полюсов якорей и числом магнитных полюсов магнитов, и один датчик угла поворота. Солнечное зубчатое колесо или зубчатый венец соединяют с первым ротором 4, а водило - со вторым ротором 5 и затем измеряют угол поворота зубчатого венца или солнечного зубчатого колеса относительно отдельно взятой катушки 3с индуктивности U-фазы с помощью датчика угла поворота. В случае, когда число магнитных полюсов якорей превышает число магнитных полюсов магнитов, с первым ротором 4 соединяют солнечное зубчатое колесо.
Если положить, что отношение числа магнитных полюсов магнитов к числу магнитных полюсов якорей - γ, то угол поворота, измеряемый указанным выше датчиком угла поворота, будет иметь выражение (1+γ)θR2-γ·θR1. Из этого следует, что измерение электрического угла θMFR магнитных полей, используемого при управлении вращающимися магнитными полями, может быть осуществлено с помощью планетарного механизма и одного датчика угла поворота и не требует двух отдельных датчиков для измерения углов поворота первого и второго роторов 4 и 5.
Кроме того, в первом примере осуществления статор 3 и первый ротор 4 размещены в радиальном направлении соответственно с внешней стороны и с внутренней стороны, однако изобретение не ограничивается такой конструкцией, и возможно обратное размещение статора 3 и первого ротора 4 в радиальном направлении соответственно с внутренней стороны и с внешней стороны. Электродвигатель 1 может иметь конструкцию не только так называемого радиального типа, при которой статор 3, а также первый и второй роторы 4 и 5 выстроены в радиальном направлении, но и конструкцию так называемого осевого типа, при которой статор 3, а также первый и второй роторы 4 и 5 выстроены в осевом направлении.
Далее приводится описание электродвигателя 31 согласно второму примеру осуществления настоящего изобретения, сопровождаемое ссылками на фиг.16 и 17. В отличие от первого примера осуществления электродвигатель 31, показанный на этих фигурах, имеет конструкцию линейного двигателя и может быть использован применительно к транспортеру. При этом составные элементы, совпадающие с составными элементами в случае первого примера осуществления, обозначены на фиг.16 одними и теми же номерами позиций. Основное внимание в приводимом ниже описании сосредоточено на отличиях от первого примера осуществления.
Как показано на фиг.16 и 17, электродвигатель 31 состоит из стационарного корпуса 32, первого статора 33, установленного внутри корпуса 32, второго статора 34, установленного внутри корпуса 32 напротив первого статора 33, и подвижного элемента 35, установленного между статорами 33 и 34.
Корпус 32 включает в себя нижнюю стенку 32а в форме пластины, у которой направление вперед-назад (направление удаления от наблюдателя на фиг.16, и вертикальное направление на фиг.17) является направлением ее длины, и боковыми стенками 32b и 32с, образующими единую конструкцию с нижней стенкой 32а и проходящими вверх от противоположных концов нижней стенки 32а одна напротив другой.
Первый статор 33 предназначен для генерирования подвижных магнитных полей и, как показано на фиг.17, включает в себя железный сердечник 33а и катушки 33с, 33d и 33е индуктивности соответственно U-фазы, V-фазы и W-фазы, установленные на железном сердечнике 33а. Железный сердечник 33а, имеющий форму прямоугольного параллелепипеда, набранного из стальных пластин, проходит вдоль всей длины корпуса 32 в направлении вперед-назад и установлен на боковой стенке 32b корпуса 32. На поверхности железного сердечника 33а со стороны второго статора 34 имеется большое число пазов 33b. Пазы 33b проходят в вертикальном направлении и выстроены с одинаковыми зазорами один относительно другого в направлении вперед-назад. Катушки 33c-33е индуктивности U-W-фаз намотаны в пазах 33b в виде распределенной обмотки (в виде волновой обмотки) и соединены с регулируемым источником 15 мощности.
В первом статоре 33, имеющем описываемую выше конструкцию, при подводе электрической мощности от регулируемого источника мощности 15, на конце железного сердечника 33а со стороны второго статора 34 с одинаковыми зазорами один относительно другого в направлении вперед-назад генерируется большое число магнитных полюсов (см. фиг.18), и обусловленные этими магнитными полюсами вращающиеся магнитные поля движутся в направлении вперед-назад. Далее, так же, как и в первом примере осуществления, магнитные полюса, генерируемые на железном сердечнике 33а, именуются "магнитными полюсами якорей". При этом на фиг.18, так же, как и на фиг.5, магнитные полюса якорей обозначены на железном сердечнике 33а и катушках 33с-33е индуктивности U-Wфаз буквами (N) и (S). В этом случае, как показано на фигуре, число магнитные полюсов якорей в пределах определенного участка INT вдоль направления вперед-назад составляет четыре.
Второй статор 34 включает в себя ряд магнитных полюсов, состоящий из большого числа постоянных магнитов 34а. Эти постоянные магниты 34а выстроены с одинаковыми зазорами один относительно другого в направлении вперед-назад, и этот ряд магнитных полюсов размещен напротив железного сердечника 33а первого статора 33. Каждый постоянный магнит 34а имеет форму прямоугольного параллелепипеда, длина которого в вертикальном направлении задана такой же, как и длина железного сердечника 33а. Через посредство фиксатора 34b постоянные магниты 34а установлены на правом конце верхней поверхности нижней стенки 32а (с "правой" стороны на фиг.16). Фиксатор 34b выполнен в виде элемента из магнитомягкого материала, например из железа. Постоянные магниты 34а закреплены на фиксаторе 34b, выполненном, как указывается выше, из железа, и поэтому на конце каждого постоянного магнита 34а со стороны первого статора 33 появляется магнитный полюс (N) или (S). При этом на фиг.17 и 18, так же, как и на фиг.3, магнитные полюса постоянных магнитов 34а (именуемые далее, как и в случае первого примера осуществления, "магнитными полюсами магнитов") обозначены буквами (N) и (S). Кроме того, как показано на фиг.18, полярности каждых двух постоянных магнитов 34а, расположенных в направлении вперед-назад один рядом с другим, являются различными, а числа постоянных магнитов 34а в пределах определенного участка INT составляет восемь.
Подвижный элемент 35 включает в себя верхнюю пластину 35а, установленную над первым и вторым статорами 33 и 34, и ряд элементов из магнитомягкого материала, образованный шестью сердечниками 35b, установленными на верхней пластине 35а. Размеры верхней пластины 35а в направлении вперед-назад и в направлении влево-вправо меньше размеров корпуса 32. Частично верхняя пластина 35а закрывает первый и второй статоры 33 и 34.
Каждый сердечник 35b имеет форму прямоугольного параллелепипеда, набранного из элементов из магнитомягкого материала, таких как стальные пластины, и длина этого сердечника 35b в вертикальном направлении задана такой же, как и длина железного сердечника 33а. Посредством соединительных элементов 35с, установленных на верхних концах сердечников 35b, эти шесть сердечников 35b соединены один с другим и выстроены с одинаковыми зазорами один относительно другого в направлении вперед-назад, причем ряд элементов из магнитомягкого материала, образованный сердечниками 35b, размещается между железным сердечником 33а первого статора 33 и рядом магнитных полюсов второго статора 34с определенными зазорами от одного и другого. В нижней части каждого сердечника 35b имеются колеса 35d. Этими колесами 35d сердечник 35b установлен на рельсовые направляющие (не показаны) на верхней поверхности нижней стенки 32а, обеспечивающие возможность свободного движения подвижного элемента 35, включающего в себя сердечники 35b, в направлении вперед-назад, но неподвижность этого элемента в направлении влево-вправо. При этом на фиг.17 и 18 соединительные элементы для удобства опущены.
В рассматриваемом примере осуществления второй статор 34 соответствует первой структуре в настоящем изобретении, а постоянные магниты 34а соответствуют магнитный полюсам в настоящем изобретении. Первый статор 33 соответствует второй структуре в настоящем изобретении, а железный сердечник 33а и катушки 33с-33е индуктивности U-W-фаз соответствуют якорям в настоящем изобретении. Подвижный элемент 35 соответствует третьей структуре в настоящем изобретении, а сердечники 35b соответствуют элементам из магнитомягкого материала в настоящем изобретении.
Кроме того, электродвигатель 31 снабжен оптическим датчиком положения 41 (средством измерения относительного взаимоположения), вырабатывающим сигнал, характеризующий положение отдельно взятого сердечника 35b подвижного элемента 35 относительно отдельно взятой катушки 33с индуктивности U-фазы первого статора 33 (именуемое далее "положением подвижного элемента"), который поступает в ECU 16. По измеренному положению подвижного элемента ECU 16 определяет относительное взаимоположение между подвижным элементом 35 и первым, а также вторым статорами 33 и 34 и на основе этого взаимоположения управляет прохождением тока по катушкам 3с-3е индуктивности U-W-фаз и, таким образом, управляет вращающимися магнитными полями. В частности, управление осуществляется следующим образом.
Как показано на фиг.18, в пределах определенного участка INT так же, как и в случае первого примера осуществления, число магнитных полюсов якорей составляет четыре, число магнитных полюсов магнитов - восемь, а число сердечников 35b - шесть. Таким образом, соотношение между числом магнитных полюсов якорей, числом магнитных полюсов магнитов и числом сердечников 35b задается пропорцией 1:2:(1+2)/2. Так как в рассматриваемом примере осуществления постоянные магниты 34а выполнены неподвижными, то при применении приведенного выше уравнения (39) регулирование электрического угла вектора вращающихся магнитных полей (именуемого далее "электрическим углом θMFM магнитных полей") осуществляется таким образом, что выполняется соотношение θMFM=3·θEM, где θEM - это величина, полученная в результате преобразования положения подвижного элемента в электрический угол (именуемый далее "электрическим углом подвижного элемента"). В частности, θEM является величиной, полученной в результате умножения измеренного положения подвижного элемента на число пар магнитных полюсов якорей, то есть на 2. При этом, как и в первом примере осуществления, описываемый выше процесс управления осуществляется путем регулирования электрического тока, протекающего по катушкам 33с-33е индуктивности U-W-фаз, методом векторного управления.
Регулирование же электрической угловой скорости подвижных магнитных полей (именуемой далее "электрической угловой скоростью ωMFM магнитных полей") осуществляется таким образом, что выполняется соотношение ωMFM=3·ωЕМ, где ωЕМ обозначает величину, полученную дифференцированием электрического угла θEM подвижного элемента по времени, то есть величину, полученную в результате преобразования скорости подвижного элемента 35 в электрическую угловую скорость (именуемую далее "электрической угловой скоростью подвижного элемента"). Кроме того, если считать, что тяговое усилие, эквивалентное электрической мощности, подводимой к первому статору 33, и электрической угловой скорости ωMFM магнитных полей, является эквивалентным тяговым усилием FSE привода, то при применении приведенного выше уравнения (41) соотношение между эквивалентным тяговым усилием FSE и тяговым усилием FM, передаваемым на подвижный элемент 35 (именуемым далее "тяговым усилием FM передачи подвижного элемента"), приобретает вид FSE=-FM/3.
Как указывалось выше, согласно рассматриваемому примеру осуществления, так же, как и в первом примере осуществления, электродвигатель 31 может работать даже при одном ряде элементов из магнитомягкого материала, образованном шестью сердечниками 35b, что позволяет уменьшить размеры и снизить стоимость изготовления электродвигателя 31. Кроме того, задание отношения числа пар магнитных полюсов магнитов к числу пар магнитных полюсов якорей в пределах определенного участка INT обеспечивает возможность свободного задания соотношения между электрической угловой скоростью ωMFM подвижных магнитных полей и электрической угловой скоростью ωЕМ подвижного элемента, а также соотношения между эквивалентным тяговым усилием FSE привода и тяговым усилием FM передачи подвижного элемента и, следовательно, возможность увеличения степени свободы при проектировании электродвигателя 31.
Регулирование же электрического угла θMFM магнитных полей, удовлетворяющее соотношению θMFM=3·θEM, позволяет обеспечить надежную работу электродвигателя 1. А использование в качестве магнитных полюсов магнитов полюсов постоянных магнитов 34а, как и в первом примере осуществления, ведет к дальнейшему уменьшению размеров электродвигателя 31 и упрощению его конструкции.
При этом электродвигатель 31 может иметь следующую конструкцию. Соединение постоянных магнитов 34а второго статора 34 одного с другим верхней пластиной, отличной от верхней пластины 35а, образует второй подвижный элемент, выполненный с возможностью свободного движения в направлении вперед-назад относительно корпуса 32. Так же, как и в первом примере осуществления, движущая сила может вырабатываться на подвижном элементе 35 и/или на втором подвижном элементе. Кроме того, закрепление железного сердечника 33а первого статора 33 на верхней пластине образует третий подвижный элемент, выполненный с возможностью свободного движения в направлении вперед-назад относительно корпуса 32. При этом, как описывается выше в первом примере осуществления, движущая сила может вырабатываться на подвижном элементе 35, на втором подвижном элементе или на третьем подвижном элементе.
В случае, когда второй подвижный элемент выполнен так, как описывается выше, с помощью датчика измеряется не только положение подвижного элемента 35, но и положение отдельно взятого постоянного магнита 34а второго подвижного элемента относительно отдельно взятой катушки 33с U-фазы, и электрический угол θMFM магнитных полей вычисляется на основе уравнение (39) в соответствии с положением подвижного элемента и измеренного положения второго подвижного элемента. При этом полученный в результате вычислений электрический угол θMFM магнитных полей используется при управления вращающимися магнитными полями.
Во втором примере осуществления в качестве положения подвижного элемента измеряется положение отдельно взятого сердечника 35а относительно отдельно взятой катушки 33с индуктивности U-фазы. В случае же, если положение подвижного элемента 35 относительно первого статора 33 может быть выражено через положение другой составной части конструкции, то измеряется положение этой составной части конструкции. Например, в качестве положения подвижного элемента может быть измерено положение отдельно взятой составной части конструкции, такой как верхняя пластина 35а, относительно отдельно взятой катушки 33d V-фазы, отдельно взятой катушки 33е W-фазы и отдельно взятого участка корпуса 32. Это относится и к указанным выше второму и третьему подвижным элементам.
Настоящее изобретение ни в коей мере не ограничивается рассмотренными выше примерами осуществления и может быть реализовано на практике в различных формах. Например, в рассмотренных выше примерах осуществления магнитный полюс образован магнитным полюсом одного постоянного магнита 4а или 34а, но может быть образован и магнитными полюсами совокупности постоянных магнитов. Например, использование магнитного полюса, образованного магнитными полюсами двух постоянных магнитов, выстроенных в виде перевернутой буквы V так, что смыкание магнитных полюсов этих двух постоянных магнитов одного с другим происходит со стороны статора 3 (первого статора 33), обеспечивает возможность усиления направленности магнитных силовых линий ML. Вместо постоянных магнитов 4а или 34а, использованных в рассмотренных выше примерах осуществления, могут быть использованы электромагниты или якоря с возможностью генерирования подвижных магнитных полей. В рассмотренных выше примерах осуществления катушки 3с-3е и 33с-33е индуктивности U-W-фаз намотаны в пазах 3b и 33b в виде распределенной обмотки, однако изобретение не ограничивается такой конструкцией, и катушки индуктивности могут быть намотаны пазах в виде сосредоточенной обмотки. Кроме того, в рассмотренных выше примерах осуществления катушки 3с-3е и 33с-33е индуктивности U-W-фаз являются трехфазными катушками индуктивности U-W-фаз, однако число фаз катушек индуктивности, выполненных с возможностью генерирования подвижных магнитных полей (вращающихся магнитных полей), может быть произвольным.
Разумеется, и число пазов 3b и 33b может быть произвольным и отличаться от числа пазов в рассмотренных выше примерах осуществления. Кроме того, в рассмотренных выше примерах осуществления пазы 3b и 33b, постоянные магниты 4а и 34а, и сердечники 5b и 35b размещены с одинаковыми зазорами один от другого, однако возможно их размещение и с неодинаковыми зазорами. В рассмотренных выше примерах осуществления число магнитных полюса якорей составляет четыре, число магнитных полюсов магнитов - восемь, а число сердечников 5а или 35b - шесть, однако в пределах пропорции 1:m:(1+m)/2 (m≠1,0) число магнитных полюсов якорей, магнитных полюсов магнитов и сердечников может быть произвольным. Кроме того, в рассмотренных выше примерах осуществления, первый датчик 21 угла поворота, второй датчик 22 угла поворота и датчик 41 положения являются датчиками магнитоиндукционного типа, однако возможно использование и датчиков оптического типа. В рассмотренных выше примерах осуществления в качестве средства управления использован ECU 16, однако возможно использование и комбинации микрокомпьютера и электрических схем. Кроме того, в пределах существа и объема настоящего изобретения возможно изменение и элементной базы конструкции.
Промышленная применимость
Электродвигатель согласно настоящему изобретению позволяет уменьшить размеры и снизить стоимость изготовления электродвигателя и обеспечивает возможность увеличения степени свободы при проектировании.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОПЕРЕЧНЫМ МАГНИТНЫМ ПОТОКОМ (ВАРИАНТЫ) | 2018 |
|
RU2690666C1 |
| БЕСЩЕТОЧНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2001 |
|
RU2231200C2 |
| БЕСКОНТАКТНЫЙ МОМЕНТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2285322C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437203C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| Многофазный мотор-генератор с магнитным ротором | 2015 |
|
RU2609524C1 |
| ВОЗБУДИТЕЛЬ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2440660C2 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МНОГОПАКЕТНЫМ ИНДУКТОРОМ | 2009 |
|
RU2382475C1 |
| БЕСКОНТАКТНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2436221C1 |
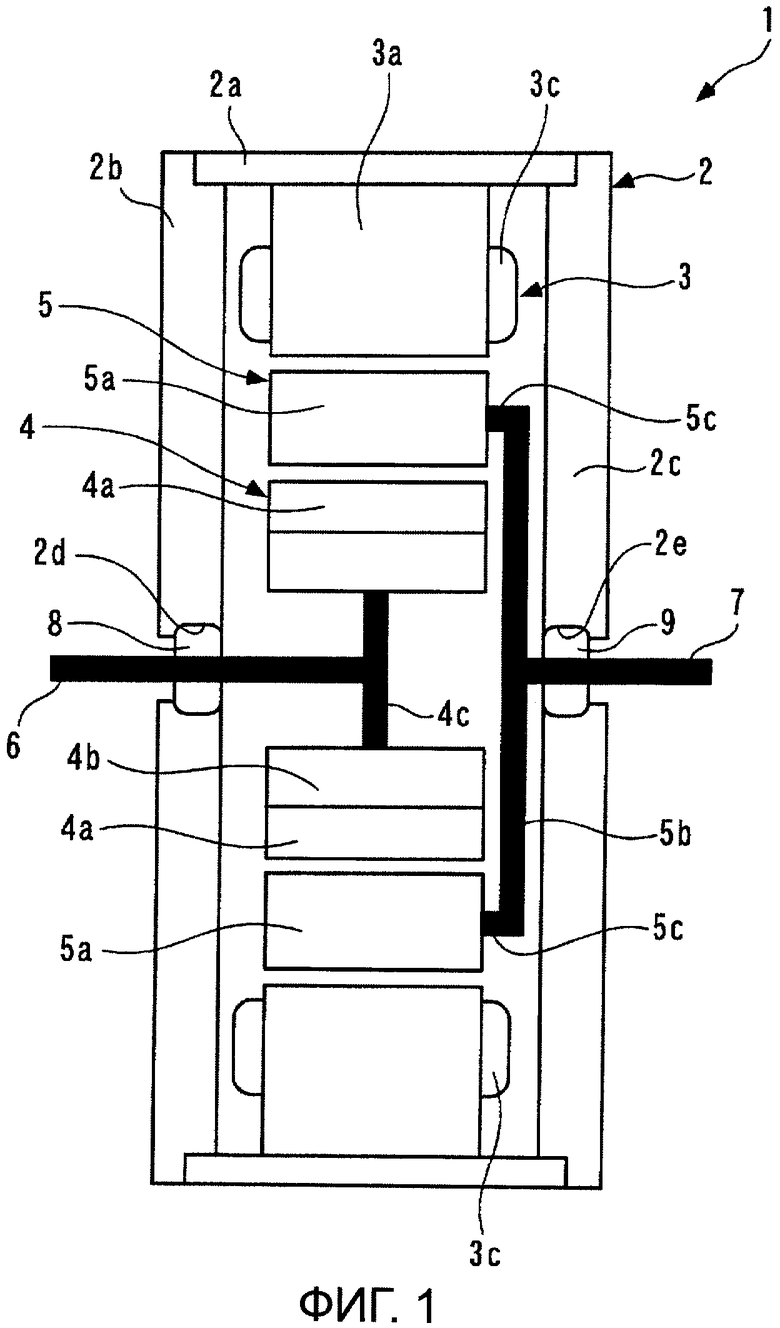
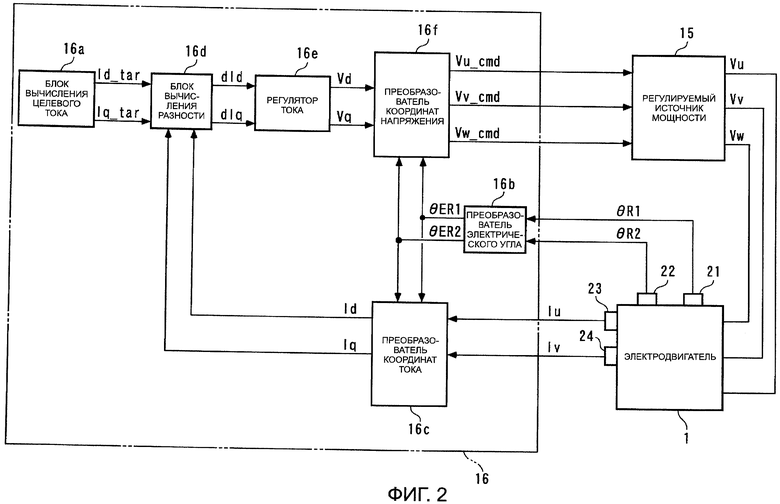
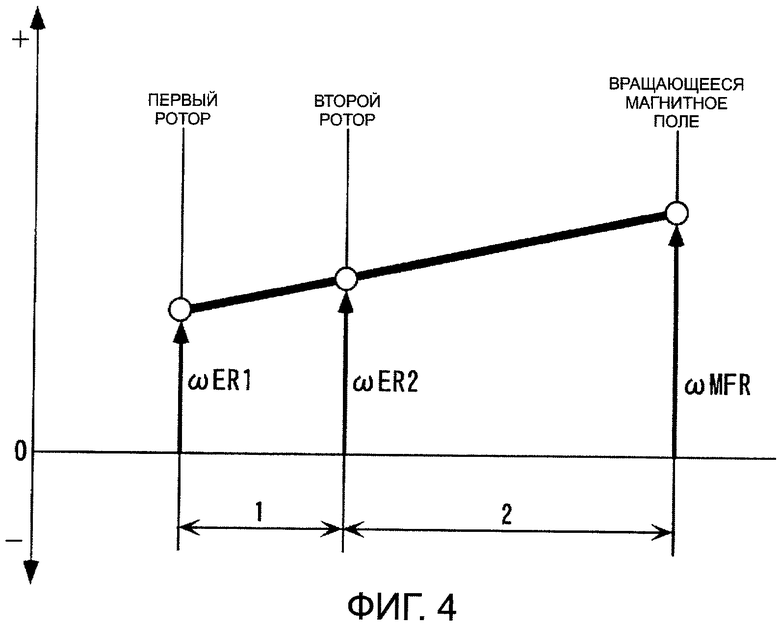
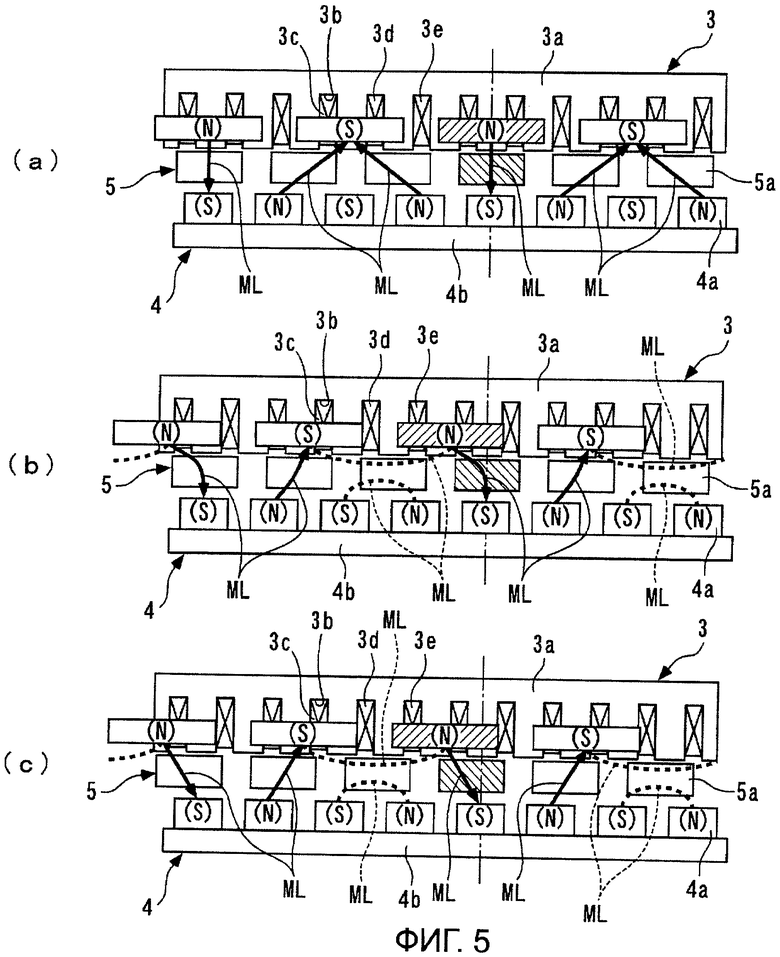
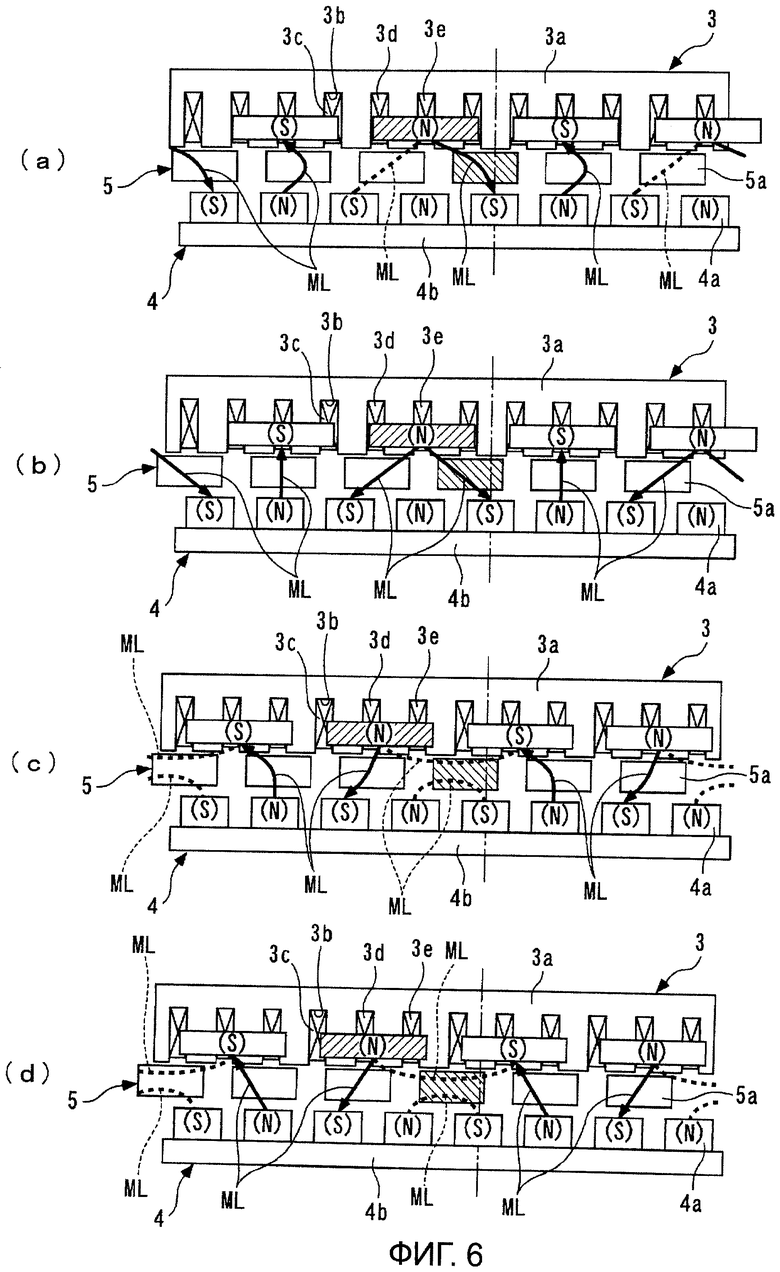
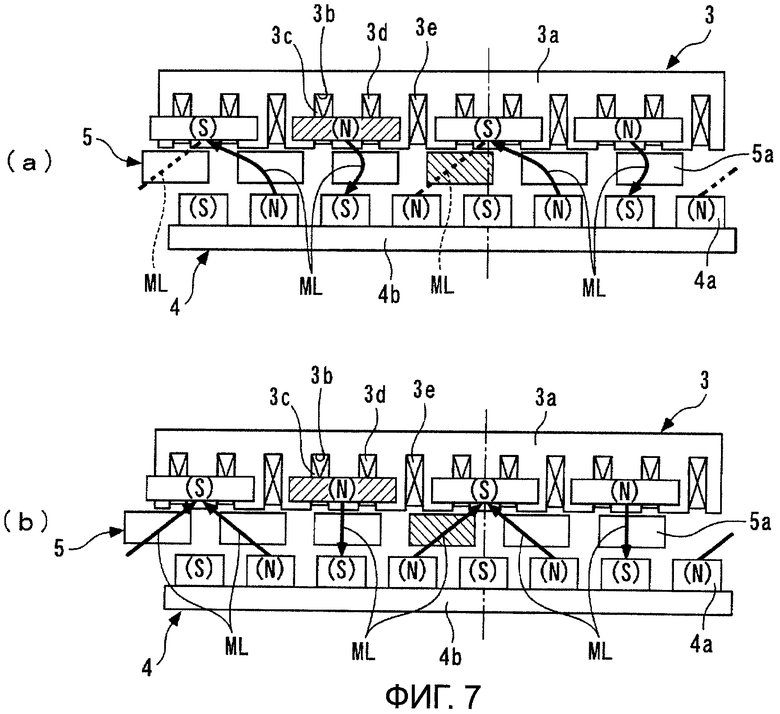
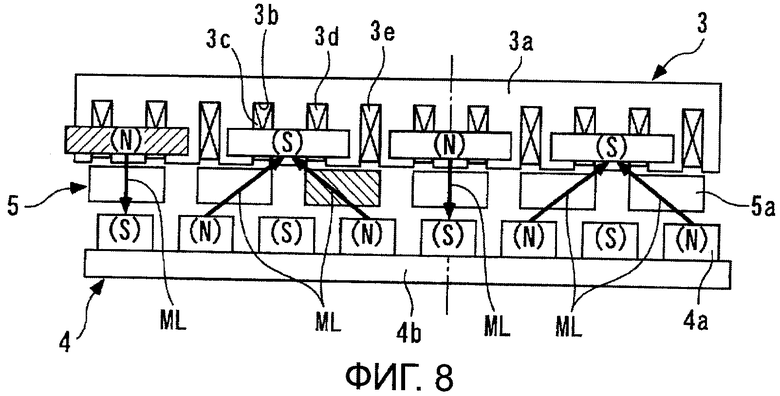
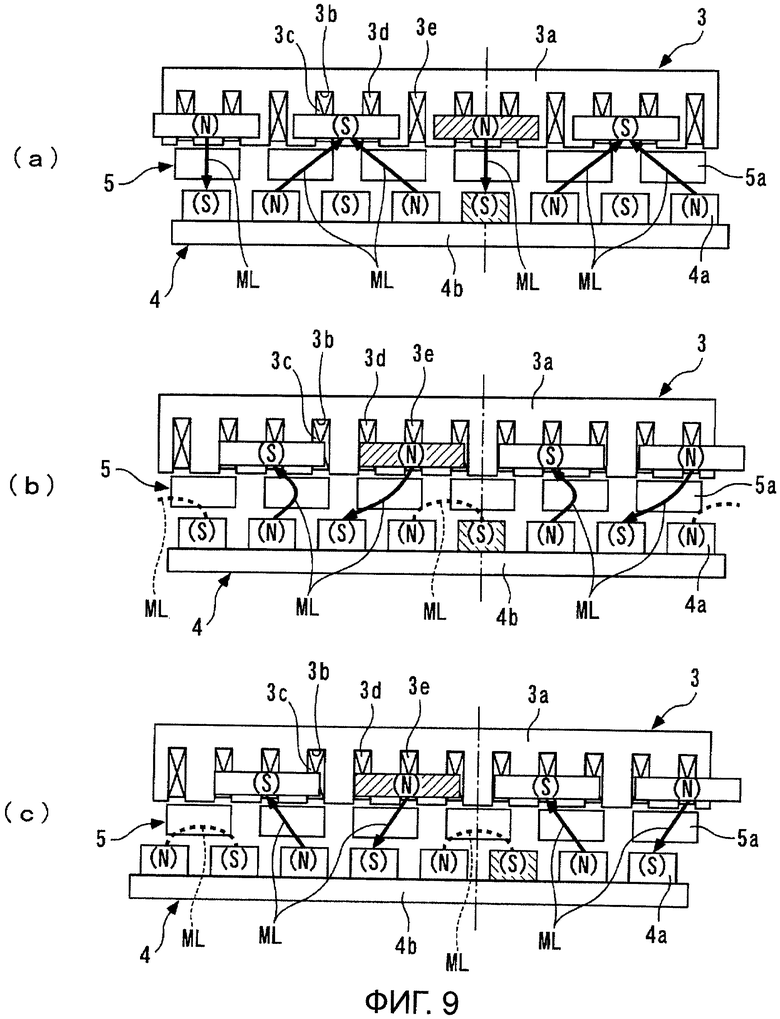
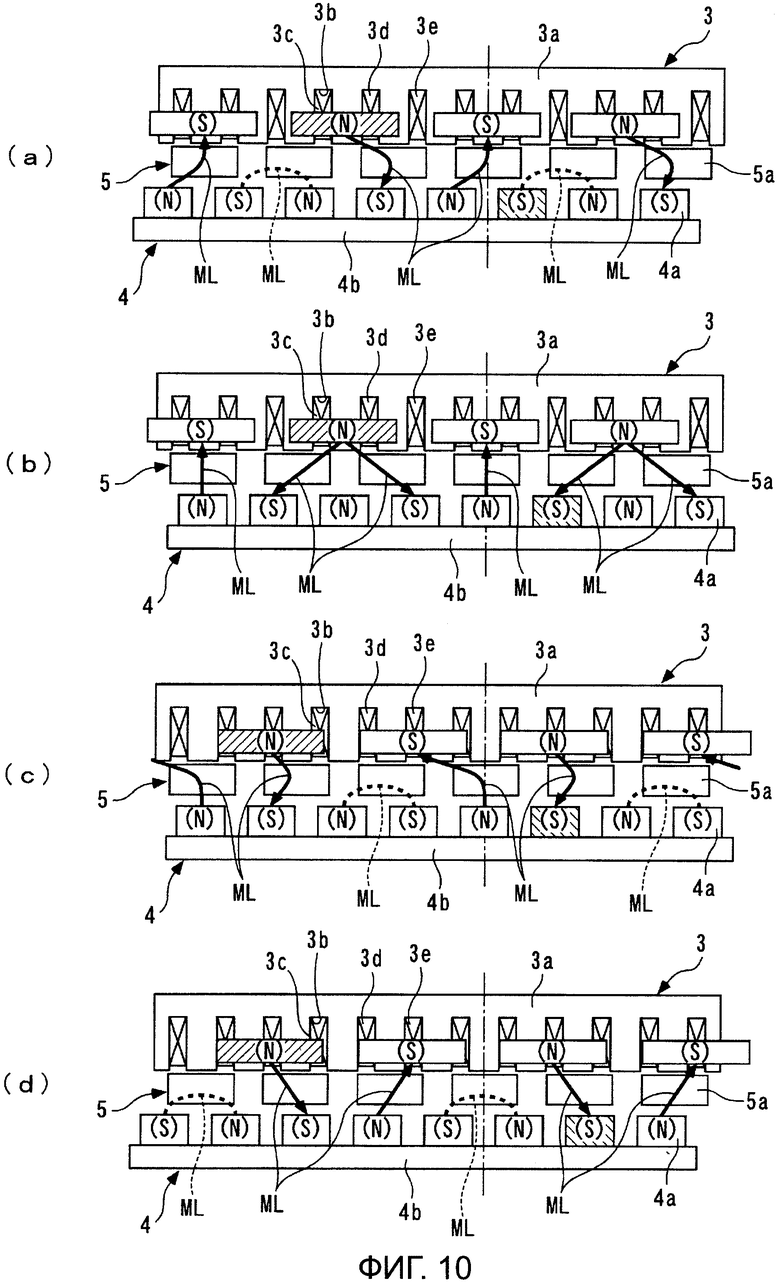
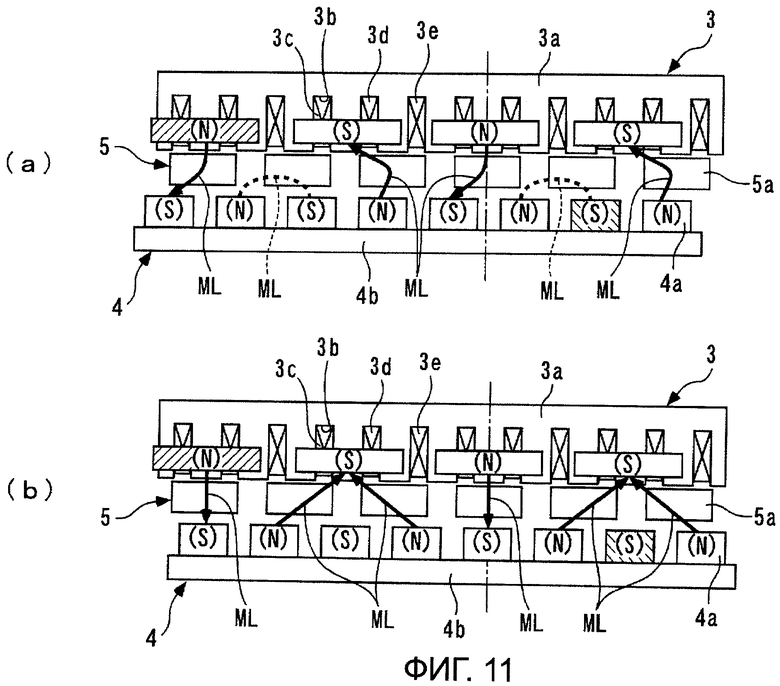
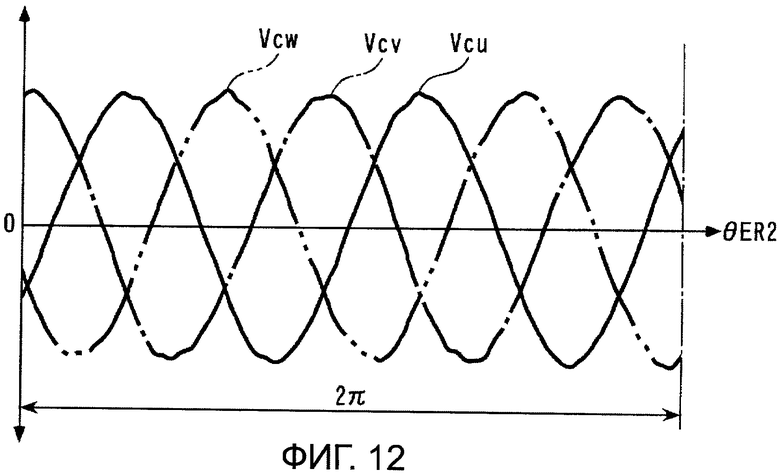
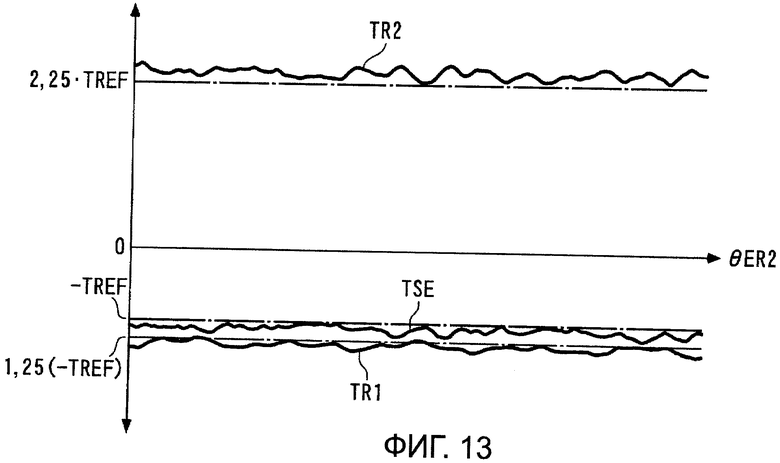
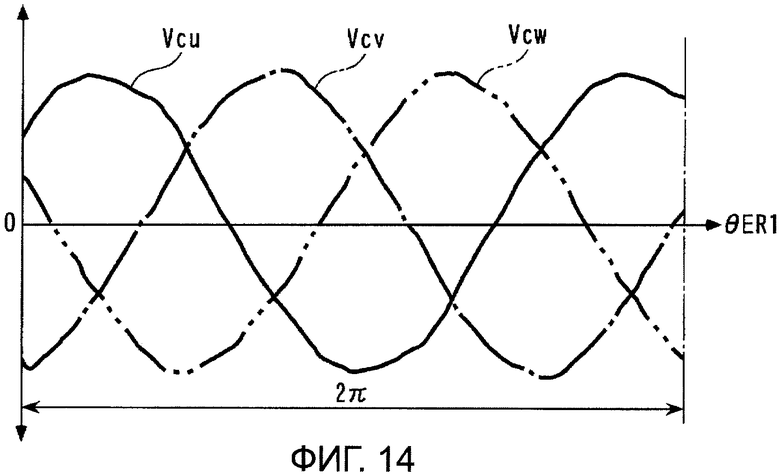
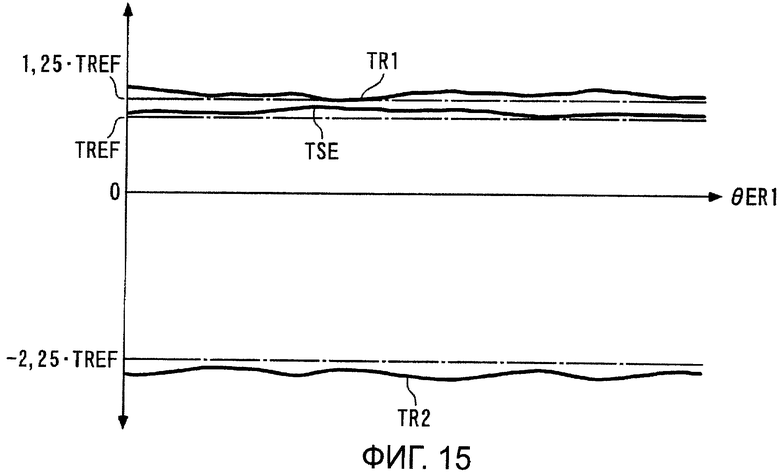
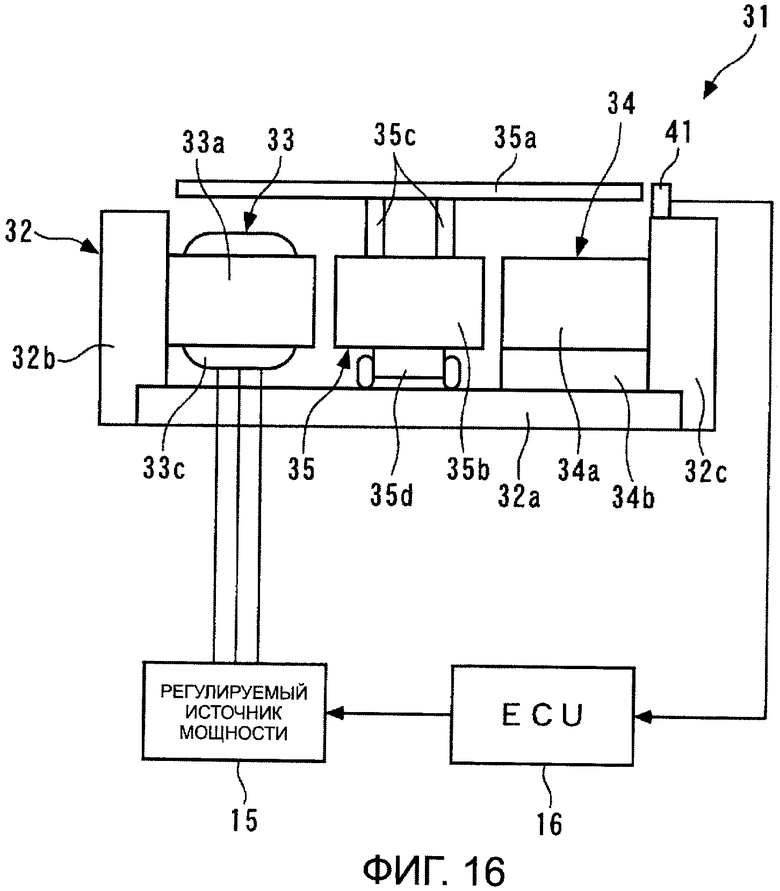
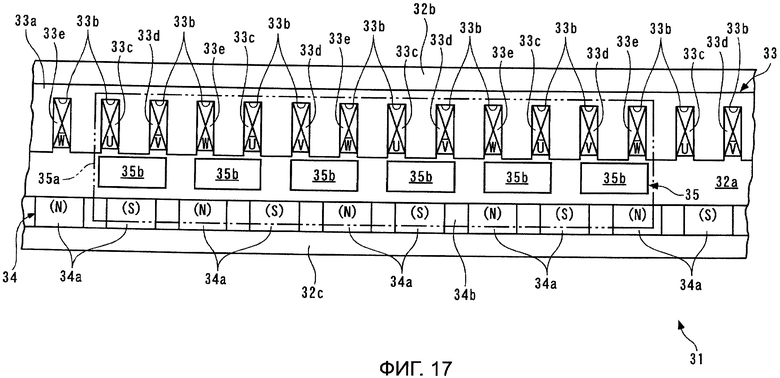
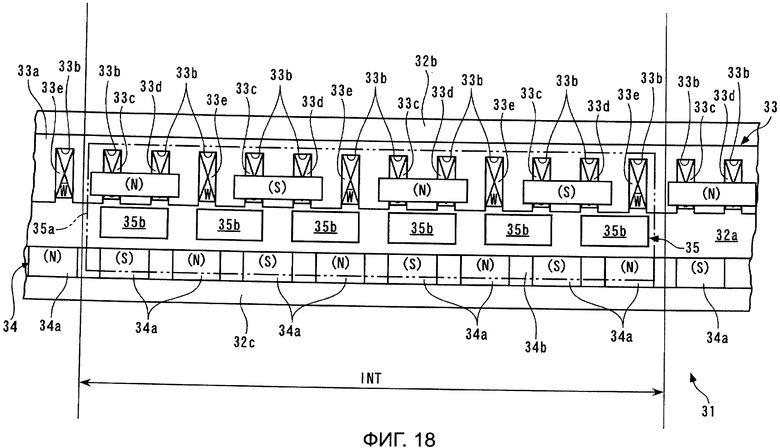
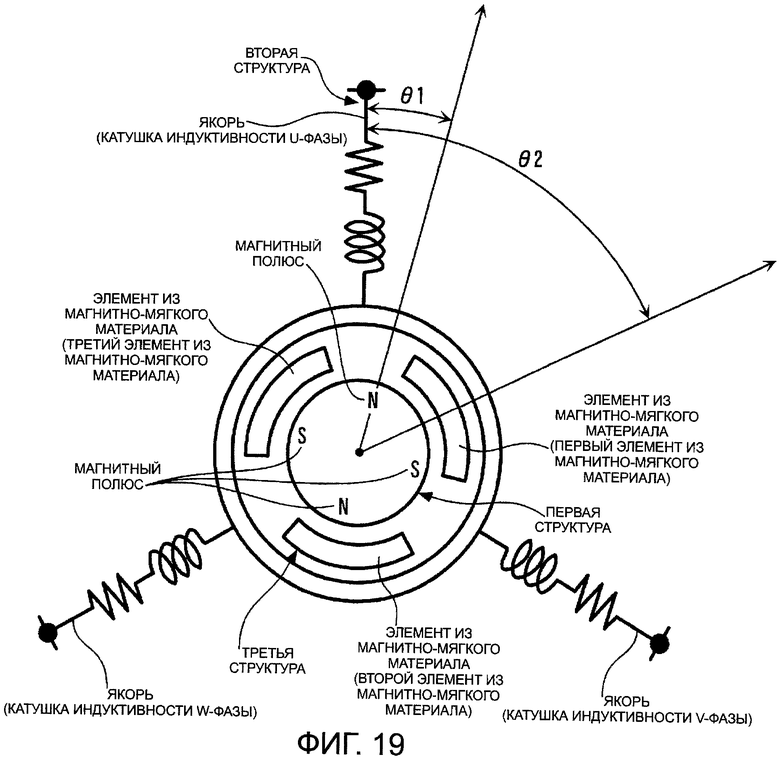
Изобретение относится к области электротехники, в частности к электрическим машинам, и касается особенностей конструктивного выполнения электродвигателей. Технический результат, достигаемый при использовании настоящего изобретения, состоит в уменьшении размеров и снижении стоимости изготовления предлагаемого электродвигателя при одновременном обеспечении возможности увеличения степени свободы при его проектировании. Согласно настоящему изобретению электродвигатель (1) состоит из первой структуры (4), включающей в себя ряд магнитных полюсов, образованных определенной совокупностью магнитных полюсов (4а), выстроенных в определенном направлении и размещенных так, что каждые два соседних магнитных полюса (4а) имеют полярности, которые отличаются одна от другой, второй структуры (3), включающей в себя ряд якорей, размещенных напротив указанного ряда магнитных полюсов для генерирования подвижных магнитных полей, движущихся в определенном направлении, между рядом якорей и рядом магнитных полюсов под действием определенной совокупности магнитных полюсов якорей, генерируемых в якорях (3с-3e) при подводе к ним электрической мощности, и третьей структуры (5), включающей в себя ряд элементов из магнитомягкого материала, образованный определенной совокупностью элементов (5а) из магнитомягкого материала, выстроенных в определенном направлении с зазором один относительно другого и размещенных так, что ряд элементов из магнитомягкого материала располагается между рядом магнитных полюсов и рядом якорей, при этом соотношение между числом магнитных полюсов якорей, числом магнитных полюсов (4а) и числом элементов (5а) из магнитно-мягкого материала задается пропорцией 1:m:(1+m)/2 (m≠1,0). 5 з.п. ф-лы, 19 ил.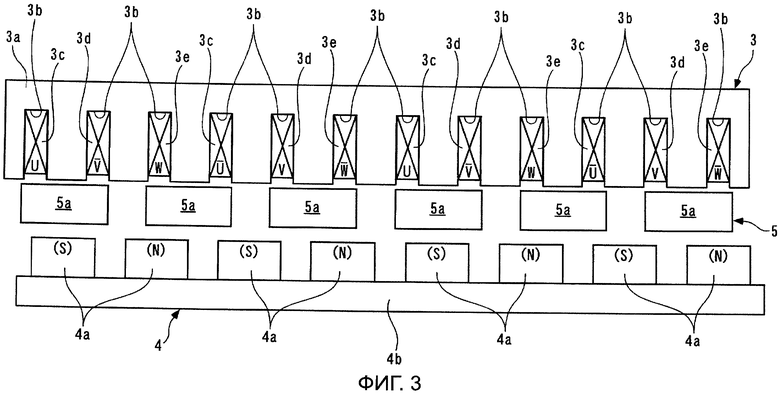
1. Электродвигатель, содержащий:
первую структуру, включающую в себя ряд магнитных полюсов, где указанный ряд магнитных полюсов образован определенной совокупностью магнитных полюсов, которые выстроены в определенном направлении и размещены так, что каждые два соседних магнитных полюса имеют полярности, отличающиеся одна от другой;
вторую структуру, включающую в себя ряд якорей, где указанный ряд якорей образован совокупностью якорей, выстроенных в определенном направлении и размещенных напротив указанного ряда магнитных полюсов для генерирования подвижных магнитных полей, движущихся в определенном направлении, между указанным рядом якорей и указанным рядом магнитных полюсов под действием определенной совокупности магнитных полюсов якорей, генерируемых в указанной совокупности якорей при подводе к ним электрической мощности; и
третью структуру, включающую в себя ряд элементов из магнитомягкого материала, где указанный ряд элементов из магнитомягкого материала образован определенной совокупностью элементов из магнитомягкого материала, выстроенных в определенном направлении с зазором один относительно другого и размещенных так, что указанный ряд элементов из магнитомягкого материала располагается между указанным рядом магнитных полюсов и указанным рядом якорей,
причем соотношение между числом магнитных полюсов якорей, числом магнитных полюсов и числом указанных элементов из магнитомягкого материала в пределах определенного участка вдоль определенного направления задается пропорцией 1:m:(1+m)/2 (m≠1,0).
2. Электродвигатель по п.1, отличающийся тем, что дополнительно содержит:
средство измерения относительного взаимоположения для измерения относительного взаимоположения между указанными структурами с первой по третью; и
средство управления для управления подвижными магнитными полями на основе измеренного относительного взаимоположения между указанными структурами с первой по третью.
3. Электродвигатель по п.2, отличающийся тем, что указанное средство измерения относительного взаимоположения измеряет в качестве относительного взаимоположения указанных структур с первой по третью электрические углы указанной первой структуры и указанной третьей структуры относительно указанной второй структуры, а
указанное средство управления управляет подвижными магнитными полями на основе разности между значением, полученным в результате умножения измеренного электрического угла указанной третьей структуры на (1+m), и значением, полученным в результате умножения измеренного электрического угла указанной первой структуры на m.
4. Электродвигатель по любому из пп.1-3, отличающийся тем, что магнитные полюса являются магнитными полюсами постоянных магнитов.
5. Электродвигатель по п.1, отличающийся тем, что электродвигатель является вращающейся машиной.
6. Электродвигатель по п.1, отличающийся тем, что электродвигатель является линейным двигателем.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ СИЛОВОЙ АГРЕГАТ | 2005 |
|
RU2280940C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321140C1 |
| ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1991 |
|
RU2025870C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА (ВАРИАНТЫ) | 2005 |
|
RU2313885C2 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

