Настоящее изобретение касается способа и устройства для подачи заготовок в упаковочную машину.
Настоящее изобретение может быть успешно применено в упаковочных машинах для сигарет, к которым нижеследующее описание отсылает исключительно в качестве примера.
Известные упаковочные машины для сигарет обычно содержат устройство для подачи заготовок типа, описанного в патенте US-A-5029834, в котором по существу вертикальный подающий канал содержит стопу заготовок и оканчивается упорной поверхностью, образованной рамкой с отверстием для извлечения заготовок, частично закрытым неподвижными зубцами для удерживания заготовок внутри канала.
С отверстием для извлечения заготовок циклично взаимодействует присасывающее захватное устройство для извлечения нижней заготовки в стопе и ее перемещения к последующему рабочему устройству на упаковочной машине.
Заготовки запасают вблизи упаковочной машины в виде пачек уложенных одна на другую заготовок, скрепленных вместе обычными картонными лентами; и согласно одному известному способу ленту каждой пачки удаляют перед загрузкой пачки в подающий канал. Однако после удаления ленты пачка оказывается неустойчивой, так что ее особенно трудно вставить в подающий канал.
Технической задачей настоящего изобретения является создание способа и устройства для подачи заготовок в упаковочную машину, которые предназначены устранить вышеупомянутые недостатки и которые одновременно являются простыми и недорогими в использовании.
Данная техническая задача решается за счет того, что согласно изобретению в способе подачи заготовок в упаковочную машину к входному участку накопителя, имеющего горизонтальную ось, подают указанные заготовки, расположенные перпендикулярно указанной оси и находящиеся в пачках, каждая из которых имеет соответствующую крепежную ленту, проходящую вокруг пачки, перемещают указанные пачки вдоль указанного накопителя и по направлению к указанному захватному участку для обеспечения плотной укладки указанных пачек одна к другой, удаляют указанные ленты для образования в указанном накопителе непрерывного ряда заготовок, оканчивающегося на указанном захватном участке, и извлекают указанные заготовки одну за другой с указанного захватного участка.
Кроме того, техническая задача решается за счет того, что согласно изобретению устройство для подачи заготовок в упаковочную машину содержит накопитель для помещения в него указанных заготовок, который имеет горизонтальную ось, входной участок и захватный участок на противоположных концах накопителя; подающее устройство для подачи на указанный входной участок указанных заготовок, расположенных перпендикулярно оси накопителя и находящихся в пачках, каждая из которых имеет соответствующую крепежную ленту, проходящую вокруг пачки; транспортирующее средство для перемещения указанных пачек вдоль указанного накопителя и по направлению к указанному захватному участку для обеспечения плотной укладки указанных пачек одна к другой; средство для удаления указанных лент с целью образования в указанном накопителе непрерывного ряда заготовок, оканчивающегося на указанном захватном участке; и захватное устройство для извлечения указанных заготовок одна за другой с указанного захватного участка.
Неограничивающий вариант осуществления настоящего изобретения будет описан в качестве примера со ссылкой на сопровождающие чертежи, на которых:
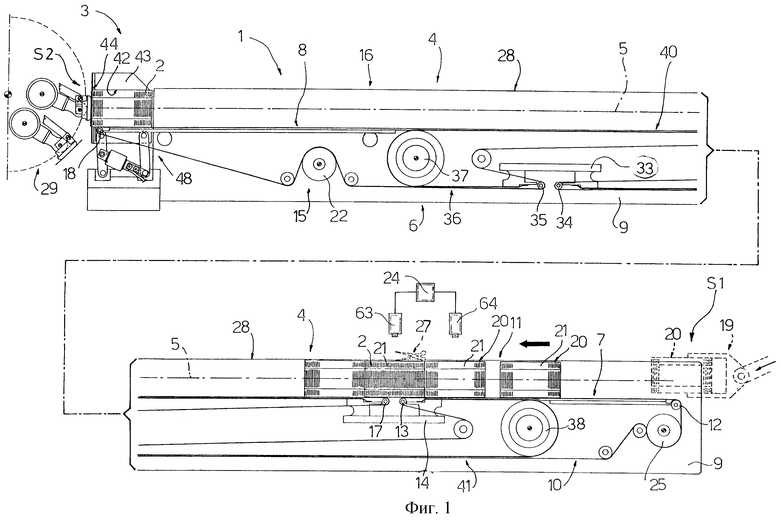
фиг.1 показывает схематический вид сбоку предпочтительного варианта выполнения устройства согласно настоящему изобретению без удаленных для ясности деталей;
фиг.2 показывает вид в плане устройства на фиг.1;
фиг.3 в увеличенном масштабе показывает вид сбоку части устройства на фиг.1;
фиг.4 показывает вид в плане части устройства на фиг.3 без удаленных для ясности деталей;
фиг.5 в увеличенном масштабе показывает вид сбоку другой части устройства на фиг.1.
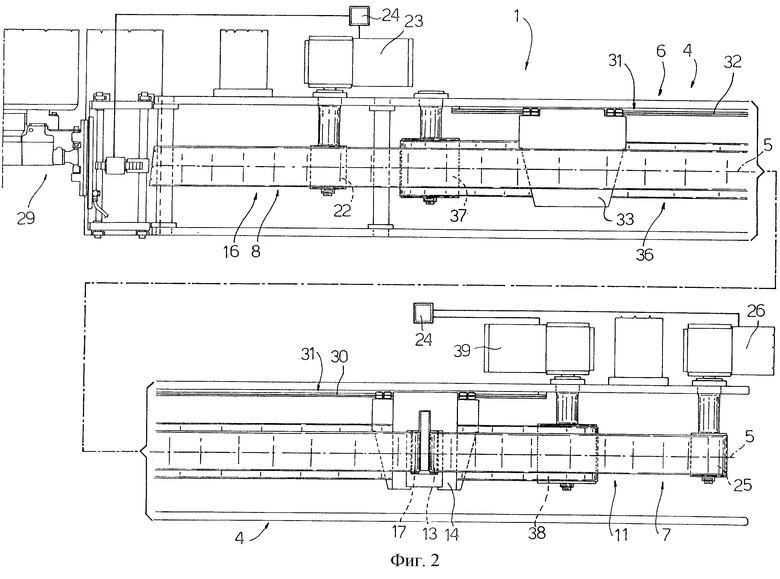
На фиг.1 позицией 1 в целом обозначено устройство для подачи заготовок 2 в упаковочную машину 3, в частности в упаковочную машину для производства жестких пачек сигарет (не показаны).
Устройство 1 содержит накопитель 4 для помещения в него заготовок 2, который имеет горизонтальную ось 5 (параллельную плоскости фиг.1) и, в свою очередь, содержит входной участок S1 и захватный участок S2 на противоположных концах накопителя 4.
Накопитель 4 содержит транспортирующее устройство 6, проходящее вдоль оси 5 между входным участком S1 и захватным участком S2 для перемещения заготовок 2 на ребре, т.е. перпендикулярно оси 5, вдоль накопителя 4.
Транспортирующее устройство 6 содержит два ленточных транспортера 7 и 8, установленных на раме 9, последовательно расположенных для перемещения заготовок 2 вдоль накопителя 4.
Транспортер 7 содержит обратную ветвь 10 и транспортирующую ветвь 11, которые проходят между концевым шкивом 12, неподвижно установленным на входном участке S1, и противоположным концевым шкивом 13, установленным на каретке 14, передвигающейся вдоль оси 5.
Транспортер 8 содержит обратную ветвь 15 и транспортирующую ветвь 16, которые проходят между концевым шкивом 17, установленным на каретке 14 и обращенным к шкиву 13, и противоположным концевым шкивом 18, неподвижно установленным на захватном участке S2.
На входном участке S1 предусмотрено известное подающее устройство 19 для снабжения транспортера 7 заготовками 2, упорядоченно находящимися в пачках 20, каждая их которых заключена в соответствующую крепежную ленту 21.
Ленточный транспортер 8 приводится в движении шкивом 22, соединенным с двигателем 23, управляемым блоком управления 24, который, как подробнее объясняется позже, обеспечивает работу транспортера 8 со скоростью V1, зависящей от скорости отбора заготовок 2 с захватного участка S2.
Ленточный транспортер 7 приводится в движении шкивом 25, соединенным с двигателем 26, управляемым блоком управления 24 для работы транспортера 7 со скоростью V2 больше, чем скорость V1, и, таким образом, для плотной укладки пачек 20 одна к другой вдоль накопителя 4. Очевидно, что такая плотная укладка связана со скольжением уплотняемых пачек 20 относительно транспортера 7.
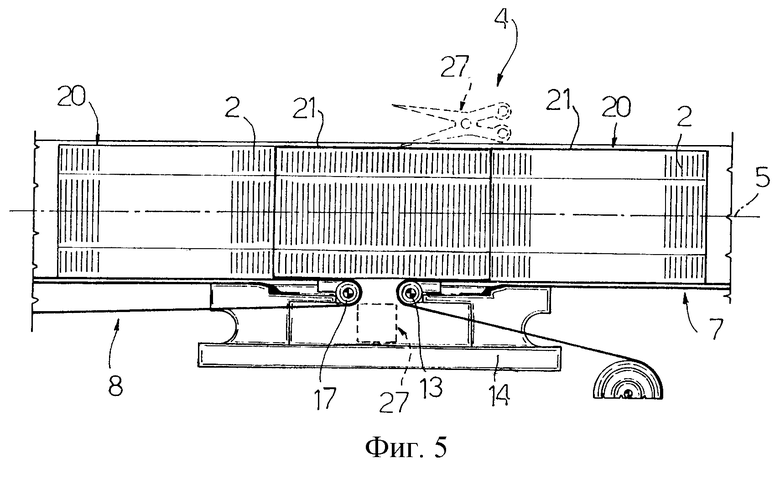
Как показано на фиг.5, каретка 14 поддерживает известное устройство 27 (показано схематически) для удаления лент 21, которое взаимодействует с каждой пачкой 20 заготовок для удаления соответствующей ленты 21 с пачки 20 и образования в накопителе 4 непрерывного ряда 28 заготовок 2, оканчивающегося на захватном участке S2.
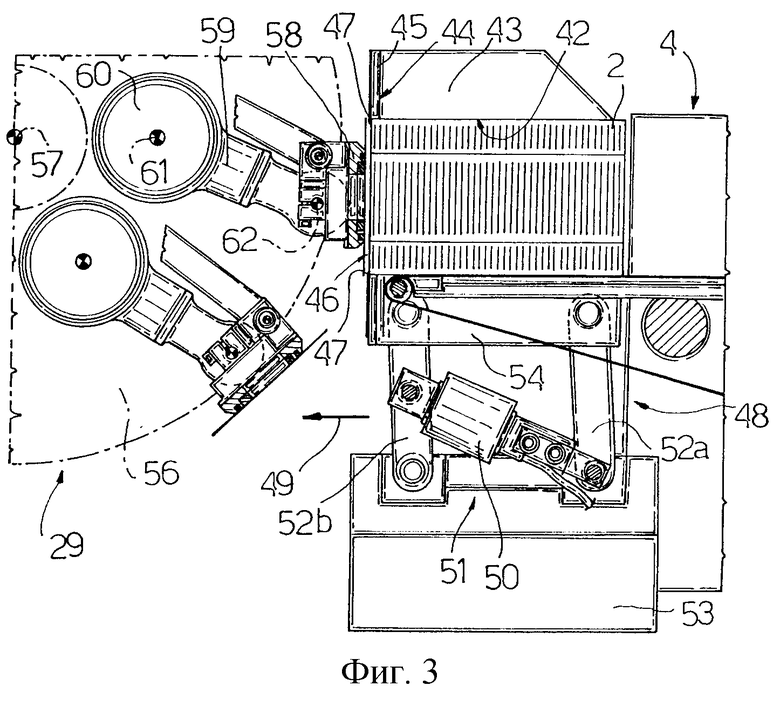
Как показано на фиг.3, на захватном участке S2 упаковочная машина 3 содержит известное захватное устройство 29 для извлечения заготовок 2 одну за другой с захватного участка S2.
Как показано на фиг.2, каретка 14 передвигается по рельсу 30 неподвижной направляющей 31, установленной на раме 9 и проходящей параллельно оси 5. Кроме того, направляющая 31 содержит рельс 32, по которому передвигается другая каретка 33, поддерживающая два обращенных друг к другу промежуточных шкива 34 и 35 соответствующих транспортеров 7 и 8. Каретки 14 и 33 механически соединены с ленточным транспортером 36, имеющим холостой концевой шкив 37 и противоположный концевой шкив 38 с приводом от двигателя 39, управляемого блоком управления 24.
Шкивы 37 и 38 определяют верхнюю транспортирующую ветвь 40, нижнюю транспортирующую ветвь 41, параллельные и противоположные друг другу и простирающиеся вдоль оси 5. Верхняя транспортирующая ветвь 40 соединена с кареткой 14, а нижняя транспортирующая ветвь 41 - с кареткой 33.
При вращении шкива 38 вокруг своей оси под управлением блока управления 24 каретки 14 и 33 совершают одинаковое движение, но в противоположных направлениях, чтобы всегда поддерживать постоянную общую длину транспортеров 7 и 8 и, таким образом, предотвращать вредное растягивание лент транспортеров 7 и 8.
При фактическом использовании каретка 14, снабженная устройством 27 для удаления лент 21, обычно поддерживается неподвижной в данном рабочем положении вдоль оси 5; и когда пачка 20, заключенная в соответствующую ленту 21, перемещается на каретку 14 и в заданное положение относительно устройства 27, устройство 27 взаимодействует с пачкой 20 для удаления соответствующей ленты 21 известным способом.
В ходе вышеуказанной операции удаления ленты каретка 14 перемещается вдоль накопителя 4 одновременно с пачкой 20 для сохранения ленты 21, пачки 20 и устройства 27 неподвижными относительно друг друга в указанном заданном положении.
После удаления ленты 21 устройство 27 высвобождает пачку 20 и каретка 14 возвращается в первоначальное рабочее положение для ожидания следующей пачки 20, заключенной в соответствующую ленту 21.
Как ясно показано на фиг.1, транспортеры 7 и 8 скользящим образом опираются на верхнюю транспортирующую ветвь 40 транспортера 36 на части соответствующих транспортирующих ветвей 11 и 16.
На захватном участке S2 транспортер 8 подает непрерывный ряд 28 заготовок 2 в канал 42, который снизу ограничен транспортером 8, а сверху и по бокам - рядом неподвижных частей 43 и который оканчивается упорной поверхностью 44, перпендикулярной к оси 5 и выдерживающей осевое усилие F, оказываемое непрерывным рядом 28 заготовок и зависящее от скорости передвижения транспортера 8.
В непоказанном варианте осуществления изобретения канал 42 имеет переменное сечение, которое становится меньше по направлению к упорной поверхности 44 для направления и размещения заготовок 2 в данном поперечном положении.
Упорная поверхность 44 определяется рамкой 45, которая содержит отверстие 46 для извлечения заготовок, частично закрытое неподвижными зубцами 47, и установлена на раме 9 с помощью устройства 48, деформирующегося в направлении деформирования 49, по существу параллельном оси 5, и в противодействии датчику силы 50, в частности динамометрическому датчику.
Устройство 48 содержит пару шарнирно-сочлененных параллелограммов 51, каждый из которых содержит пару параллельных противоположных рычагов 52а, 52в, на одном конце шарнирно-соединенных с неподвижным основанием 53, образующим часть рамы 9, и на другом конце - с тягой 54, поддерживающей рамку 45 и горизонтально расположенной под транспортирующей ветвью 16 транспортера 8.
Два параллелограмма 51 объединены друг с другом двумя поперечинами 55, одна из которых простирается между двумя точками поворота рычагов 52а относительно основания 53, другая - между двумя соответствующими промежуточными точками двух рычагов 52в.
Датчик силы 50 расположен между двумя поперечинами 55, противодействуя деформации двух параллелограммов 51 из данной конфигурации, принимаемой параллелограммами 51 при реакции на нулевое осевое усилие F.
Таким образом, датчик 50 способен мгновенно определять величину осевого усилия F, оказываемого непрерывным рядом 28 заготовок 2 на рамку 45, и сообщать соединенному с ним блоку управления 24 о величине осевого усилия F.
Захватное устройство 29 - известного типа и обеспечивает извлечение каждой заготовки 2 по одиночке через отверстие 46 в рамке 45 и подачу заготовки 2 к оберточному колесу (не показано) упаковочной машины 3.
Устройство 29 содержит колесо 56, непрерывно вращающееся (по часовой стрелке на фиг.1) вокруг соответствующей неподвижной оси 57, перпендикулярной к оси 5 и несущей ряд пневматических захватных головок 58, расположенных вокруг оси 57 и соединенных с колесом 56 соответствующими рычагами 59, каждый из которых шарнирно соединен с колесом 56 осью 60 для качения относительно колеса 56 вокруг соответствующей оси 61, параллельной оси 57.
Каждая захватная головка 58, в свою очередь, шарнирно соединена с соответствующим рычагом 59 для качения относительно рычага 59 вокруг соответствующей оси 62, параллельной оси 57.
Теперь будет описана работа подающего устройства 1 с момента (показан на фиг.1), в котором накопитель 4 содержит непрерывный ряд 28 заготовок 2, простирающийся между упорной поверхностью 44 и кареткой 14, и данное количество пачек 20 заготовок 2 до каретки 14 по направлению перемещения заготовок.
С захватного участка S2 захватное устройство 29 извлекает заготовки 2 одну за другой со скоростью, зависящей от скорости работы упаковочной машины 3; и одновременно блок управления 24 управляет двигателем 23 для регулирования скорости передвижения V1 транспортера 8 с целью поддержания величины осевого усилия F постоянной и равной (в пределах диапазона регулирования) заданной величине.
Как уже упоминалось, блок управления 24 управляет двигателем 26 для работы транспортера 7 со скоростью V2 больше, чем скорость V1 транспортера 8, с целью плотной укладки пачек 20 одну к другой вдоль накопителя 4.
Блок управления 24 с интервалами, зависящими от скорости транспортера 8 и, следовательно, от скорости отбора заготовок захватным устройством 29, приводит в действие подающее устройство 19 для подачи пачки 20 заготовок 2 на транспортер 7 на входном участке S1.
Датчик, например оптический датчик 63, соединен с блоком управления 24 и находится над указанным рабочим положением каретки 14, сообщая блоку управления 24, когда пачка 14, заключенная в соответствующую ленту 21, подается на каретку 14 в указанное заданное положение относительно устройства 27.
С блоком управления 24 соединен другой датчик, например оптический датчик 64, находящийся над указанным рабочим положением каретки 14 и сообщающий блоку управления 24, плотно ли уложена пачка 20, заключенная в ленту 21 и расположенная на каретке 14, между непрерывным рядом 28 заготовки 2 и, по меньшей мере, одной следующей пачкой 20, заключенной в соответствующую ленту 21.
Только когда пачка 20 оказывается расположенной на каретке 14 и одновременно плотно уложенной между непрерывным рядом 28 свободно размещенных заготовок 2 и, по меньшей мере, следующей пачкой 20, заключенной в соответствующую ленту 21, блок управления 24 приводит в действие устройство 27 для удаления ленты 21 с пачки 20 на каретке 14, как это описано ранее.
Следовательно, подающее устройство 1 обеспечивает удаление лент 21 в наилучших возможных условиях благодаря тому, что во время удаления ленты 21 устройство 27 сохраняется в постоянном неподвижном положении относительно соответствующей пачки 20.
Кроме того, после удаления ленты 21 соответствующая пачка 20 остается устойчивой (т.е. положение заготовок 2 в пачке 20 остается неизменным) благодаря плотному расположению пачки 20 между непрерывным рядом 28 свободно размещенных заготовок 2 и, по меньшей мере, одной следующей пачкой 20, заключенной в соответствующую ленту 21.
Наконец, осевое усилие F, оказываемое заготовками 2 на рамку 45 с упорной поверхностью, является по существу постоянным и равным данной величине, которая не является настолько большой, чтобы препятствовать легкому извлечению заготовок 2 присасывающим захватным устройством 29, и не настолько малой, чтобы не допускать плотной укладки и правильного расположения заготовок 2 внутри канала 42.
Указанная данная величина осевого усилия F обычно вычисляется блоком управления 14 в соответствии с рабочей скоростью упаковочной машины 3 и типом используемой заготовки 2.
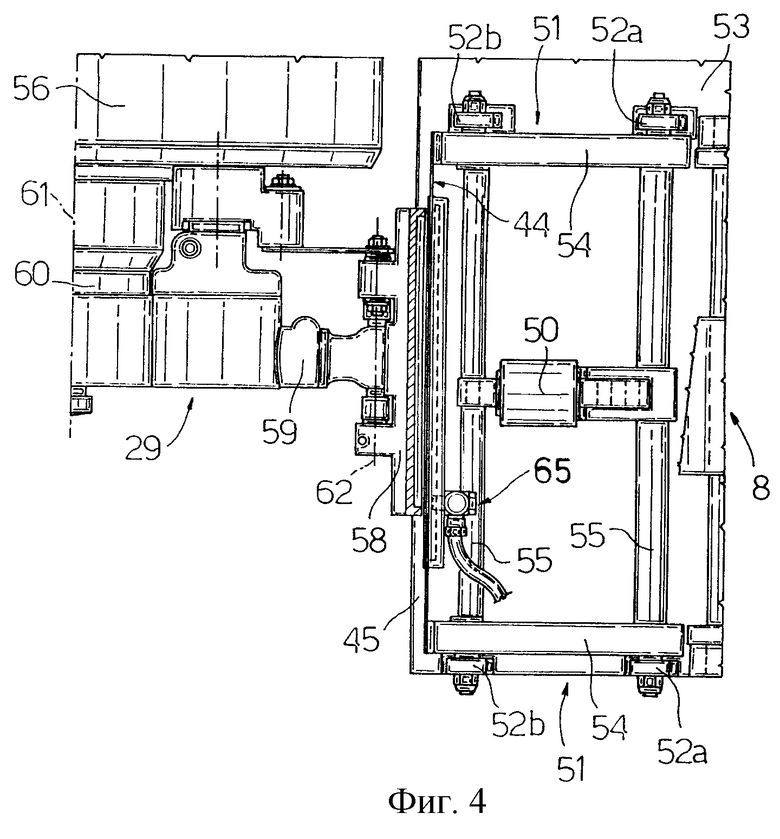
Как показано на фиг.4, вблизи рамки 45 расположено разделительное устройство 65 для вдувания воздуха между заготовками 2, примыкающими к рамке 45, и, таким образом, способствования извлечению захватным устройством 29 заготовки 2 у отверстия 46.
В непоказанном варианте осуществления изобретения датчик силы 50 соединен с механическим выключающим устройством для ограничения до безопасной величины максимальной нагрузки, которой подвергается датчик 50.
В другом непоказанном варианте осуществления изобретения транспортер 8 снабжен вибрационным устройством, которое действует на непрерывный ряд 28 заготовок 2, способствуя плотной укладке и правильному расположению заготовок 2 вдоль накопителя 4 и, в частности, внутри канала 42.
Изобретение касается способа и устройства 1 для подачи заготовок 2 в упаковочную машину 3, посредством которых накопитель 4, имеющий горизонтальную ось 5, перемещает непрерывный ряд 28 заготовок 2 к захватному участку S2, с которого заготовки 2 извлекаются одна на другой. Заготовки 2 подают к входному участку S1 накопителя 4 в пачках 20, в которых заготовки 2 расположены перпендикулярно горизонтальной оси 5 накопителя и скреплены вместе лентой 21, которую удаляют только после плотной укладки пачек 20 вдоль накопителя 4. Изобретение позволяет повысить устойчивость пачек после удаления крепежной ленты. 2 с. и 12 з.п. ф-лы, 5 ил.
| DE 4301169 А, 21.07.1994 | |||
| ФИЛЬТРУЮЩИЙ МАТЕРИАЛ | 2000 |
|
RU2157274C1 |
| DE 3723589 А, 26.01.1989 | |||
| US 5029834 А, 09.07.1991. | |||

