Настоящее изобретение касается устройства для подачи заготовок в упаковочную машину.
В нижеследующем описании ссылка исключительно в качестве примера делается на упаковочные машины для изготовления жестких пачек с сигаретами.
Устройства для подачи заготовок в упаковочные машины для сигарет, например, в ту машину, которая описана, например, в US-A-5029834, содержат присасывающую захватную головку, циклично передвигаемую кривошипно-шатунным механизмом, по существу, назад и вперед между позицией захвата, в которой головка взаимодействует с нижним отверстием в накопителе заготовок для извлечения заготовки, и позицией разгрузки, в которой головка подает заготовку на транспортирующий барабан.
Хотя подающие устройства вышеописанного типа и являются вполне удовлетворительными, они из-за инерции и вибрации, вызываемых, по существу, возвратно-поступательным движением захватной головки, не отвечают требованиям в отношении высоких рабочих скоростей /свыше 600 пачек в минуту/, предъявляемым к ним со стороны современных упаковочных машин.
В FR-A-2478576 описывается упаковочная машина с устройством для подачи заготовок, которое содержит накопитель для хранения заготовок, имеющий нижнее отверстие, и захватную головку для извлечения соответствующей заготовки и помещения ее на пластину, соединенную с колесом, непрерывно вращающимся вокруг первой оси для подачи захватной головки по бесконечной траектории, проходящей через позицию загрузки, где захватная головка взаимодействует с нижним отверстием для извлечения заготовки. Пластина соединена с колесом для качания относительно колеса вокруг второй оси, параллельной первой оси, посредством исполнительного механизма.
Подающее устройство, описанное в вышеупомянутой FR-A-2478576, способно действовать со скоростью выше, чем скорость подающего устройства, описанного в US-A-5029834, но оно не способно удовлетворительно действовать при высоких рабочих скоростях /свыше 600 пачек в минуту/, которые требуют от него современные упаковочные машины, вследствие того, что при такой скорости захватная головка, двигаясь, по существу, в радиальном направлении относительно колеса, не располагает достаточным временем для правильного соприкосновения с извлекаемой заготовкой.
Технической задачей настоящего изобретения является создание устройства для подачи заготовок в упаковочную машину, которое является простым и недорогим в изготовлении, обеспечивает устранение вышеупомянутого недостатка и, следовательно, обладает высокой рабочей скоростью.
Данный технический результат достигается за счет того, что устройство для подачи заготовок в упаковочную машину содержит накопитель для хранения заготовок, имеющий нижнее отверстие, пластину, имеющую первый конец и второй конец, противоположные друг другу, захватную головку для извлечения соответствующей заготовки, расположенную на пластине вблизи первого конца пластины, и колесо, непрерывно вращающееся вокруг первой оси для подачи захватной головки вдоль бесконечной траектории, проходящей через позицию загрузки, где захватная головка взаимодействует с нижним отверстием накопителя для извлечения заготовки, при этом пластина соединена с колесом для качания относительно колеса вокруг второй оси, проходящей через второй конец пластины и параллельной первой оси, причем пластина содержит исполнительный механизм для изменения углового положения захватной головки вокруг второй оси. Согласно изобретению исполнительный механизм выполнен с возможностью качания захватной головки относительно колеса вокруг четвертой оси, параллельной и расположенной вблизи от первой оси при подаче захватной головки вдоль траектории.
Исполнительный механизм может быть соединен с пластиной в промежуточной точке между первым концом и вторым концом пластины.
Исполнительный механизм может содержать первую передачу, соединенную с пластиной, и первое копирное управляющее средство, соединенное с первой передачей для управления угловым положением пластины вокруг второй оси.
Первое копирное управляющее средство может содержать неподвижный первый копир, проходящий вокруг первой оси, и первый следящий механизм, взаимодействующий с первым копиром, имеющий первую каретку, шарнирно соединенную с колесом для качания относительно колеса вокруг третьей оси, параллельной первой оси, при этом первая передача содержит первый рычаг, который одним концом шарнирно соединен с пластиной в указанной промежуточной точке, а противоположным концом шарнирно соединен с первой кареткой через второй рычаг, выполненный под углом за одно целое с первой кареткой.
Второй исполнительный механизм может содержать вторую передачу, соединенную с пластиной, и второе копирное управляющее средство, соединенное со второй передачей для управления угловым положением пластины вокруг указанной четвертой оси.
Второе копирное управляющее средство может содержать два неподвижных копира, проходящих вокруг первой оси, и второй следящий механизм, взаимодействующий с двумя неподвижными копирами и имеющий вторую каретку, шарнирно соединенную с колесом для качания вокруг пятой оси, параллельной первой оси, причем вторая передача содержит третий рычаг, который одним концом шарнирно соединен с пластиной для качания относительно пластины вокруг второй оси и противоположным концом шарнирно соединен с колесом для качания относительно колеса вокруг четвертой оси.
Вторая передача может содержать четвертый рычаг, выполненный под углом и за одно целое с третьим рычагом, и пятый рычаг, одним концом шарнирно соединенный со второй кареткой, а противоположным концом - с четвертым рычагом.
Устройство может дополнительно содержать транспортирующий барабан, непрерывно вращающийся вокруг шестой оси и, по существу, тангенциальный к колесу в позиции разгрузки, где заготовка снимается с колеса, и всасывающее устройство, пневматически соединенное с захватной головкой для создания всасывания через захватную головку, при ее перемещении от позиции загрузки к позиции разгрузки.
Всасывающее устройство может содержать всасывающий насос, центральную неподвижную распределительную головку, соосно вставленную в колесо и имеющую камеру, образованную на внешней периферии неподвижной распределительной головки и разделенную на две смежные, пневматически изолированные секции, трубчатый корпус, выполненный за одно целое с колесом и соосный ему, взаимодействующий с неподвижной распределительной головкой и имеющий отверстие, пневматически соединенное с захватной головкой для пневматического соединения при использовании захватной головки с неподвижной камерой, и два клапана для соответствующего соединения насоса с двумя секциями, первая из которых расположена у позиции загрузки, а вторая - у позиции разгрузки.
Неограничивающий вариант осуществления настоящего изобретения будет описан в качестве примера со ссылкой на сопровождающие чертежи, на которых:
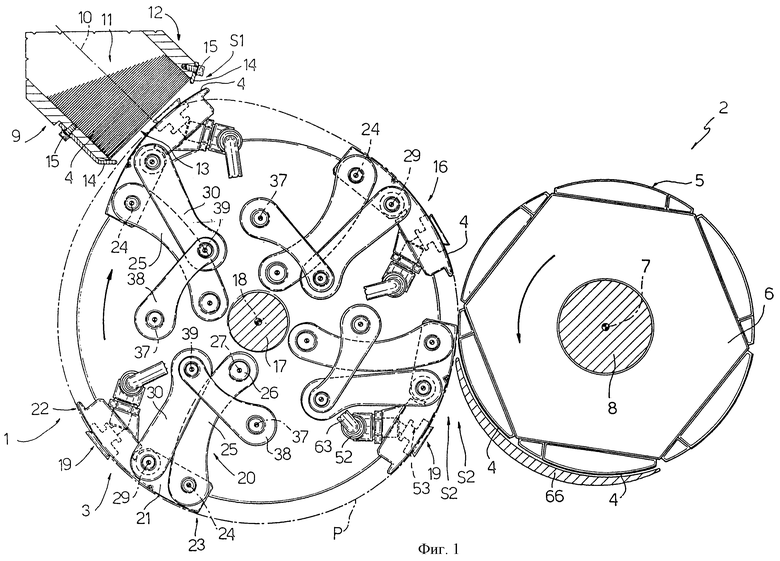
фиг.1 схематически и с удалением частей для ясности показывает вид спереди с частичным разрезом - предпочтительный вариант выполнения устройства согласно настоящему изобретению;
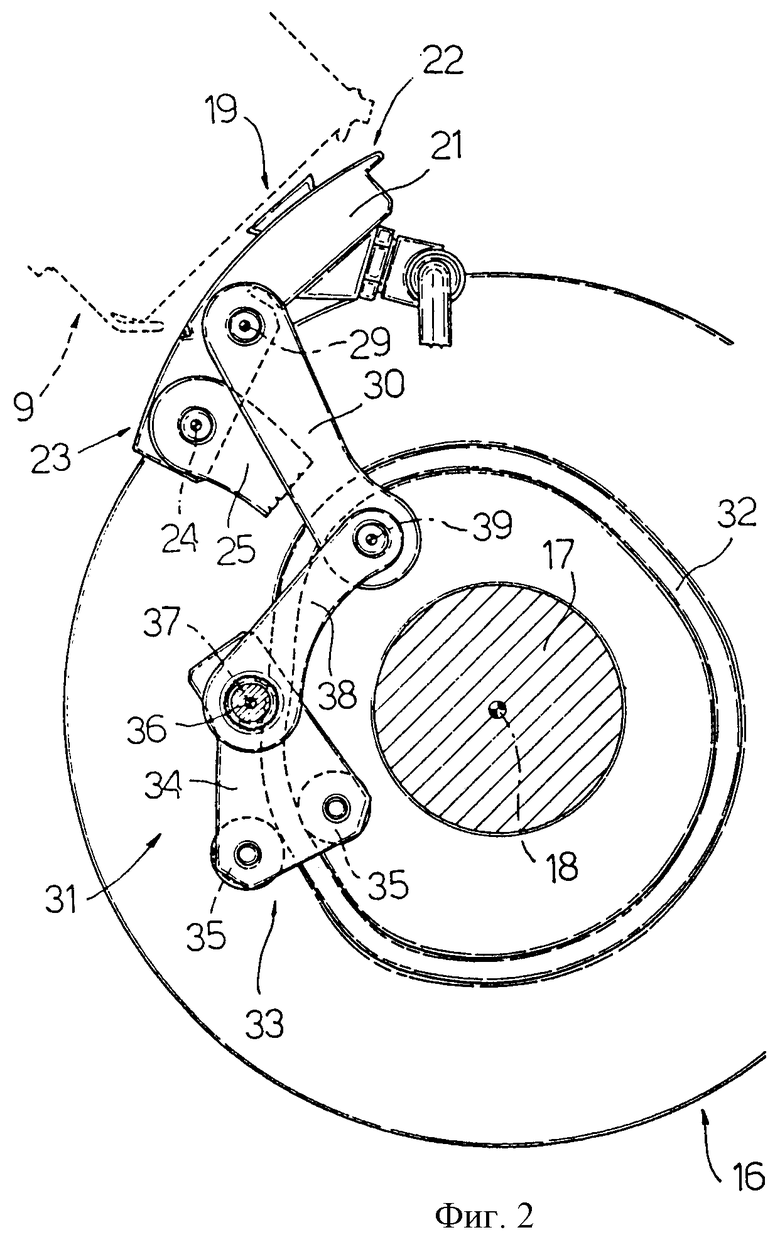
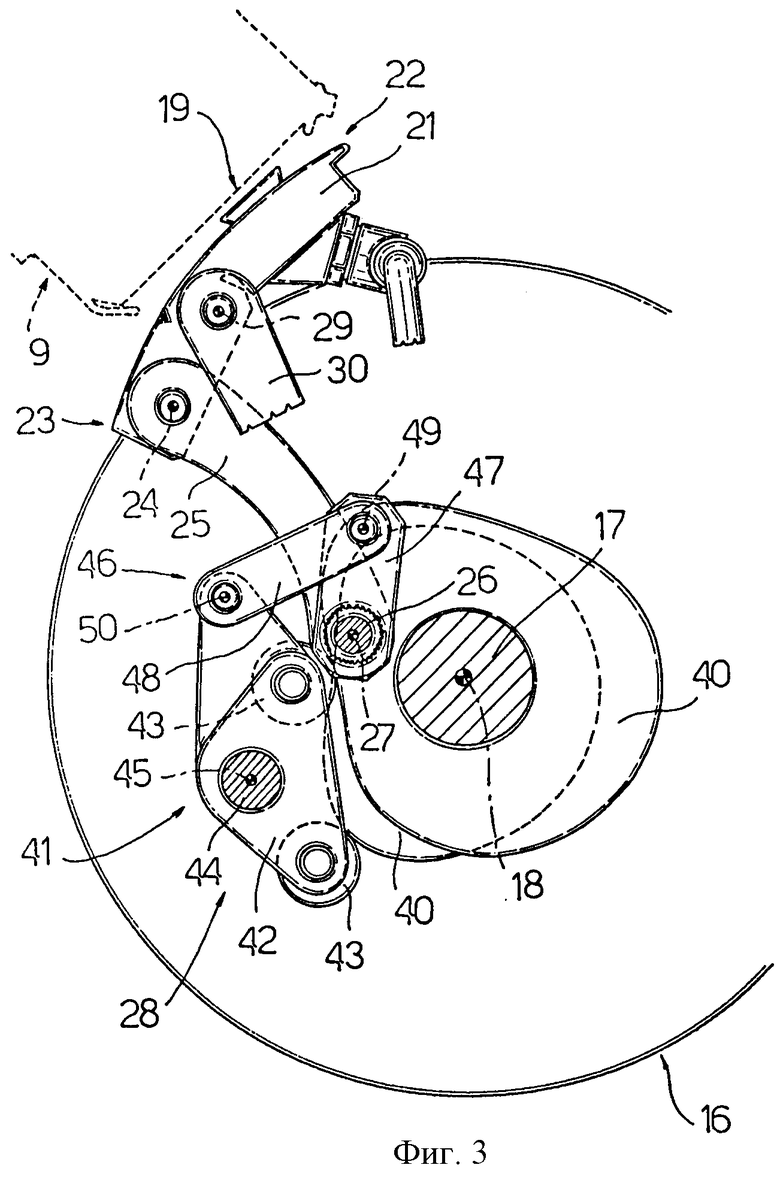
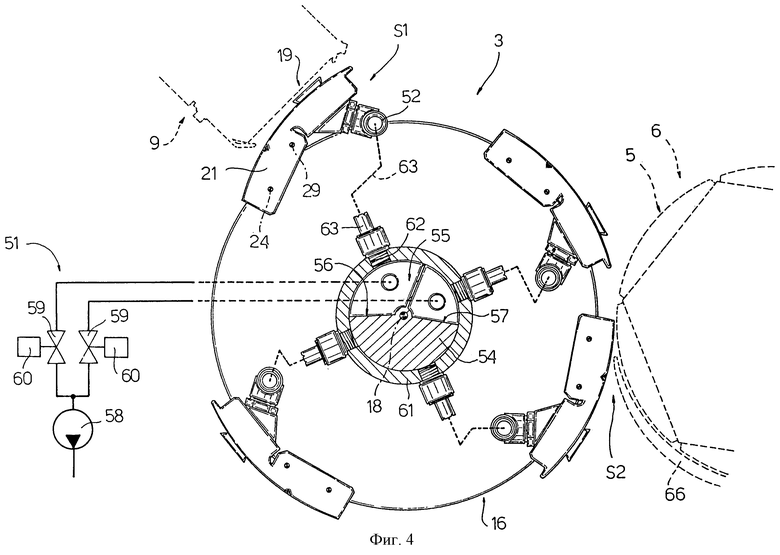
фиг.2, 3 и 4 показывают соответствующие подробные виды устройства на фиг.1;
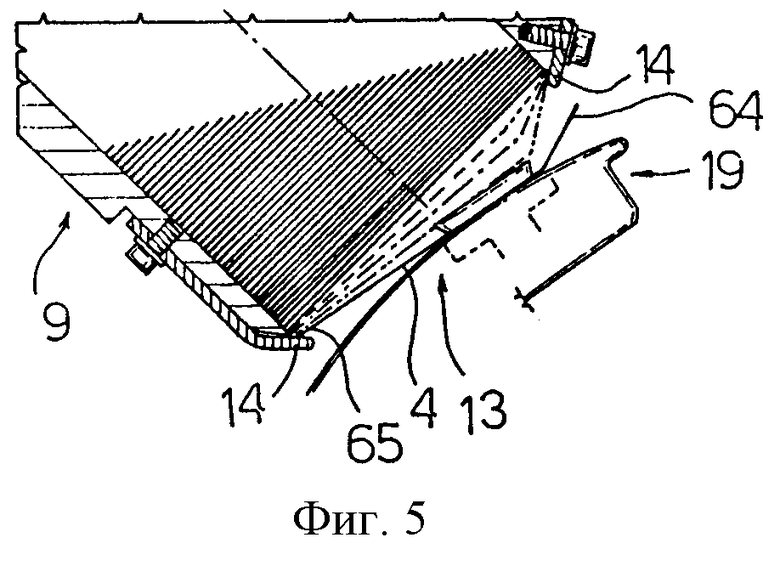
фиг.5 показывает более подробный вид устройства на фиг.1 в другом рабочем положении.
На фиг.1 позицией 1 в целом обозначена подающая часть упаковочной машины 2, содержащая устройство 3 для подачи заготовок 4 к соответствующим присасывающим опорам 5, имеющимся на наружной периферии транспортирующего барабана 6, который посредством приводного вала 8 непрерывно вращается /против часовой стрелки на фиг.1/ вокруг неподвижной центральной оси 7, перпендикулярной к плоскости фиг.1.
Устройство 3 содержит накопитель 9, имеющий центральную ось в плоскости фиг.1 и вмещающий стопу 11, по существу, прямоугольных заготовок 4. Накопитель 9 проходит, по существу, в вертикальной плоскости и содержит нижнюю часть 12, имеющую, по существу, прямоугольное нижнее отверстие 13 с двумя выступающими частями 14, прикрепленными к накопителю 9 соответствующими винтами 15 для удержания стопы 11 заготовок 4 внутри накопителя 9 против действия силы тяжести.
Кроме того, устройство 3 содержит колесо 16, которое посредством приводного вала 17, имеющего неподвижную ось 18 параллельно оси 7 и поперек оси 10, вращается с постоянной скоростью /по часовой стрелке на фиг.1/ и поддерживает ряд присасывающих захватных головок 19, равномерно распределенных вокруг оси 18. Непрерывное вращение колеса 16 вокруг оси 18 обеспечивает подачу каждой захватной головки 19 вдоль траектории Р через позицию загрузки S1, где захватная головка 19 взаимодействует с нижним отверстием 13 для извлечения соответствующей заготовки 4 в отверстии 13, и через позицию разгрузки S2, где захватная головка 19 подает извлеченную заготовку 4 к соответствующей опоре 5 на транспортирующем барабане 6.
Каждая захватная головка 19 механически соединена с колесом 16 с помощью расположенного между ними соответствующего исполнительного механизма 20, который при прохождении захватной головки 19 через позицию загрузки S1 передвигает захватную головку 19 тангенциально по отношению к окружности колеса 16 для удержания захватной головки 19 таким образом, чтобы она была обращена к нижнему отверстию 13 в течение достаточно длительного интервала времени для полного извлечения соответствующей заготовки 4 в отверстии 13. В пределах того же самого интервала времени исполнительный механизм 20 передвигает захватную головку 19 радиально по отношению к колесу 16 для предоставления захватной головке 19 возможности извлечения заготовки 4 из нижнего отверстия 13.
Когда захватная головка 19 перемещается через позицию разгрузки S2, исполнительный механизм 20 приводит захватную головку 19 в неподвижное положение, по существу, тангенциально по отношению к окружности колеса 16 для подачи извлеченной заготовки 4 к соответствующей опоре 5.
Каждый исполнительный механизм 20 содержит пластину 21, имеющую конец 22, который расположен впереди по направлению перемещения захватной головки 19 и на котором установлена соответствующая захватная головка 19, и конец 23, который является противоположным к концу 22 и на котором пластина 21 шарнирно прикреплена к одному концу рычага 25 для качания относительно оси, причем противоположный конец рычага 25 шарнирно прикреплен к колесу 16 с помощью пальца 26 и может качаться относительно колеса 16 вокруг оси 27 под действием копирного механизма управления 28 /показан на фиг.3/.
В своей промежуточной части между концами 22 и 23 каждая пластина 21 шарнирно соединена с одним концом рычага 30 для качания относительно оси 29, причем рычаг 30 на противоположном конце механически соединен с копирным управляющим средством 31 /показан на фиг.2/ и передвигается этим средством 31, по существу, радиально по отношению к колесу 16.
Как показано на фиг.2, каждое управляющее средство 31 содержит неподвижный копир 32, проходящий вокруг оси 18 и взаимодействующий со следящим механизмом 33, который содержит каретку 34 с двумя параллельными копировальными роликами 35, находящимися в соприкосновении с противоположными боковыми поверхностями копира 32. Каретка 34 пальцем 36 шарнирно соединена с колесом 16 для обеспечения возможности ее качания относительно колеса 16 вокруг оси 37, параллельной оси 18, и образует первое плечо качающегося рычага 38, поворачивающегося на колесе 16 на оси 37 и содержащего второе плечо 38, конец которого, противоположный концу, выполненному за одно целое с кареткой 34, в 39 шарнирно соединен со свободным концом соответствующего рычага 30.
При вращении колеса 16 вокруг оси 18 профиль копира 32 обуславливает качание каждой каретки 34 и соответствующего рычага 38 вокруг оси 37 и, таким образом, передвижение соответствующего рычага 30, по существу, радиально по отношению к колесу 16, при этом радиальное движение рычага 30, в свою очередь, вызывает качание соответствующей пластины 21 относительно соответствующего рычага 25 вокруг соответствующей оси 24 и, таким образом, передвижение соответствующей захватной головки 19, по существу, радиально по отношению к колесу 16.
Как показано на фиг.3, каждый механизм управления 28 содержит два неподвижных копира 40, проходящих вокруг оси 18, смещенных в осевом направлении относительно друг друга и взаимодействующих со следящим механизмом 41, содержащим каретку 42 с двумя копировальными роликами 43, каждый из которых соприкасается с соответствующим копиром 40. Каретка 43 пальцем 44 шарнирно соединена с колесом 16 для обеспечения возможности ее качания относительно колеса 16 вокруг оси 45, параллельной оси 18, и с помощью кривошипно-шатунного механизма 46 механически соединена с одним концом соответствующего рычага 25.
Каждый кривошипно-шатунный механизм 46 содержит плечо 47, которое вместе с соответствующим плечом 25 образует качающийся рычаг, шарнирно установленный на колесе 16 и качающийся относительно него вокруг оси 27. Кроме того, кривошипно-шатунный механизм 46 содержит рычаг 48, на одном конце соединенный с плечом 47 с помощью шарнира 49, а на другом конце - с кареткой 42 с помощью шарнира 50.
При вращении колеса 16 вокруг оси 18 профили копиров 40 обуславливают качание каждой каретки 42 вокруг соответствующей оси 45; движение, создаваемое качанием каретки 42, соответствующим рычагом 48 передается к плечу 47 для качания плеча 47 и соответствующего плеча 25 вокруг соответствующей оси 27 и при данном небольшом расстоянии между осями 27 и 18, как это ясно показано на фиг.3, качание плеча 25 вокруг соответствующей оси 27 вызывает движение соответствующей пластины 21 и, следовательно, соответствующей захватной головки 19, по существу, тангенциально по отношению к окружности колеса 16.
Как показано на фиг.4, устройство 3 содержит всасывающее устройство 51, которое пневматически соединено с одним концом 52 внутреннего трубопровода 53 /фиг.1/ каждой захватной головки 19 для создания всасывания через головку 19 с целью удерживания соответствующей заготовки 4 на головке 19 при ее перемещении от позиции загрузки S1 к позиции разгрузки S2.
Всасывающее устройство 51 содержит неподвижную центральную распределительную головку 54, соосно вставленную в колесо 16 и имеющую камеру 55, которая образована на внешней периферии распределительной головки 54 и разделена на две смежные, пневматически изолированные секции 56 и 57, расположенные соответственно в позициях S1 и S2. Каждая секция 56, 57 соединена с всасывающим насосом 58 через соответствующий клапан 59, управляемый управляющим устройством 60.
Кроме того, всасывающее устройство 51 содержит трубчатый корпус 61, который расположен соосно колесу 16 и вращается с ним, взаимодействует с распределительной головкой 54 и для каждой захватной головки 19 имеет сквозное отверстие 62, пневматически соединенное на одном конце с распределительной головкой 54, а на другом конце - с соответствующим концом 52 посредством трубопровода 63.
При вращении колеса вокруг оси 18 каждое отверстие 62 сообщается с секцией 56, когда соответствующая захватная головка 19 проходит через позицию загрузки S1, и затем сообщается, по существу, без перерыва с секцией 57, когда соответствующая захватная головка 19 перемещается через позицию разгрузки S2. Секции 56, 57 имеют такую угловую протяженность, чтобы всасывание через каждую захватную головку 19 начиналось при ее взаимодействии с нижним отверстием 13 накопителя 9 и прекращалось при расположении захватной головки 19 напротив соответствующей опоры 5 на транспортирующем барабане 6.
Теперь со ссылкой на одну захватную головку 19 будет описано действие устройства 3 в тот момент, когда захватная головка 19 покидает позицию разгрузки S2.
При непрерывном вращении колеса 16 захватная головка 19 подается через позицию загрузки S1, где соответствующий исполнительный механизм 20 передвигает захватную головку тангенциально, т.е., по существу, вдоль траектории Р по отношению к колесу 16 с целью удерживания головки 19 при ее обращении к нижнему отверстию 13 накопителя 9 в течение достаточно длительного интервала времени для завершения извлечения соответствующей заготовки 4 в отверстии 13. В течение того же самого интервала времени исполнительный механизм 20, кроме того, передвигает головку 19 радиально по отношению к колесу 16 посредством указанного качания вокруг соответствующей оси 24, чтобы привести головку 19 в соприкосновение с заготовкой 4, которая прилипает к головке 19 под действием всасывания, создаваемого, как описывалось, всасывающим устройством 51.
Как показано на фиг.5, после того как заготовка прилипнет к головке 19, исполнительный механизм 20 отводит головку 19 от нижнего отверстия 13 посредством указанного качания вокруг соответствующей оси 24, что приводит к деформированию края 64 заготовки 4 и к возможности его скольжения по передней выступающей части 14 по направлению перемещения головки 19 вдоль траектории Р. В конце радиального движения головки 19 исполнительный механизм 20 останавливает тангенциальное движение головки 19, которая еще раз подается вдоль траектории Р благодаря непрерывному вращению колеса 16 вокруг оси 18, а при перемещении головки 19 по траектории Р край 65 заготовки отводится от низа задней выступающей части 14 по направлению перемещения для завершения извлечения заготовки 4 из нижнего отверстия 13.
При непрерывном вращении колеса 16 головка 19 затем проходит через позицию разгрузки S2, где исполнительный механизм 20 устанавливает захватную головку 19 в фиксированное положение, по существу, тангенциально по отношению к колесу 16 с целью подачи извлеченной заготовки 4 к соответствующей опоре 5, движущейся через позицию разгрузки S2 вместе с захватной головкой 19 и, по существу, тангенциально относительно нее.
Заготовка 4 передается с захватной головки 19 к соответствующей опоре 5 простым прекращением всасывания, как описывалось, через захватную головку 19 и одновременным включением всасывания через опору 5. Для обеспечения полного прилипания заготовки 4 к опоре 5 позади позиции разгрузки S2 по направлению вращения предусмотрена неподвижная дугообразная часть 66, по существу, тангенциальная к опоре 5.
Вышеуказанные стадии повторяются циклически.
Во время нормальной работы упаковочной машины 2 известный блок управления /не показан/ машины 2 может посылать сигнал к управляющему устройству 60 не подавать заготовку 4 к транспортирующему барабану 6 в случае, например, отбраковывания соответствующего изделия /не показано/.
В этом случае управляющее устройство 60 вначале воздействует на клапан 59 для временного отключения всасывания в секции 56 и, таким образом, для предотвращения извлечения заготовки 4 захватной головкой 19 на позиции загрузки S1 и для сохранения всасывания в секции 57, чтобы предшествующая захватная головка 19, перемещающаяся к позиции разгрузки S2, могла удерживать соответствующую заготовку 4.
Затем управляющее устройство 60 воздействует на клапан 59 секции 57 для временного отключения всасывания в секции 57 и, таким образом, предотвращения всасывания через незагруженную захватную головку 19 и для сохранения всасывания в секции 56, чтобы следующая захватная головка 19 могла извлекать соответствующую заготовку 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДАЮЩАЯ ЛИНИЯ ДЛЯ ПОДАЧИ ИЗДЕЛИЙ В ФОРМЕ ПАРАЛЛЕЛЕПИПЕДА К МАШИНЕ ПОЛЬЗОВАТЕЛЯ | 1999 |
|
RU2233780C2 |
| УПАКОВОЧНАЯ МАШИНА ДЛЯ СИГАРЕТ | 1999 |
|
RU2228887C2 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЗАГОТОВОК В УПАКОВОЧНУЮ МАШИНУ | 1999 |
|
RU2228889C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДАЧИ ЗАГОТОВОК ОБЕРТОЧНОГО МАТЕРИАЛА В УПАКОВОЧНУЮ МАШИНУ | 1999 |
|
RU2232113C2 |
| СПОСОБ И МАШИНА ДЛЯ ОБЕРТЫВАНИЯ ИЗДЕЛИЯ, В ЧАСТНОСТИ, ПАЧКИ СИГАРЕТ В ЛИСТ ТЕРМОСВАРИВАЕМОГО ОБЕРТОЧНОГО МАТЕРИАЛА | 1999 |
|
RU2233776C2 |
| Транспортно-технологический ротор | 1987 |
|
SU1498565A1 |
| Многопозиционный кольцераскатныйСТАН | 1979 |
|
SU814530A1 |
| СПОСОБ И МАШИНА ДЛЯ ОБЕРТЫВАНИЯ ИЗДЕЛИЯ | 1999 |
|
RU2233779C2 |
| Роторно-конвейерная машина | 1988 |
|
SU1574479A1 |
| СПОСОБ И МАШИНА ДЛЯ ОБЕРТЫВАНИЯ ИЗДЕЛИЙ, В ЧАСТНОСТИ, ПАЧЕК СИГАРЕТ В ЛИСТЫ ОБЕРТОЧНОГО МАТЕРИАЛА | 1999 |
|
RU2233777C2 |
Устройство /3/ для подачи заготовок /4/ в упаковочную машину /2/ содержит колесо /16/, непрерывно вращающееся вокруг первой оси /18/ и подающее захватную головку /19/ для заготовки вдоль бесконечной траектории /Р/, проходящей через позицию загрузки /S1/, где захватная головка /19/, качающаяся относительно колеса /16/ вокруг второй оси /24/, параллельной оси /18/ колеса /16/, взаимодействует с нижним отверстием /13/ накопителя /9/ заготовок для извлечения заготовки /4/, и затем через позицию разгрузки /S2/, где захватная головка /19/, поворачивающаяся вместе с колесом /16/, подает заготовку /4/ на транспортирующий барабан /6/. Описанное подающее устройство способно обеспечить правильное соприкосновение захватной головки с извлекаемой заготовкой при высоких скоростях упаковочных машин. 8 з.п. ф-лы, 5 ил.
| СПОСОБ ПОЛУЧЕНИЯ ЛЕТУЧИХ СОЕДИНЕНИЙ ПЛАТИНОВЫХ МЕТАЛЛОВ | 2011 |
|
RU2478576C2 |
| US 5029834 A, 09.07.1991 | |||
| US 3386558 A, 04.06.1968 | |||
| ПРОТЕКТОР ПНЕВМАТИЧЕСКОЙ ШИНЫ | 1993 |
|
RU2053133C1 |
| ТРАНСФОРМАТОР ДЛЯ ЭЛЕКТРОТЕРМИЧЕСКИХ УСТАНОВОК | 1971 |
|
SU425226A1 |
| ЭКРАННЫЙ УЗЕЛ ЛЮМИНЕСЦЕНТНЫХ УСТРОЙСТВ ОТОБРАЖЕНИЯ МНОГОЦВЕТНОЙ ВИДЕОИНФОРМАЦИИ | 2001 |
|
RU2207656C2 |

