Изобретение относится к испытательной технике, а именно к системам управления ротационной машиной и оборудованием при проведении многофункциональных воздействий на испытываемые изделия с возможностью перепрограммирования оборудования.
Известна ротационная машина с автоматизированным (следящим) приводом, обеспечивающим плавную регулировку угловой скорости, см. Клюев В.В. “Испытательная техника”. М.: Машиностроение, 1982. Кн.1. - 433 с.
Эта ротационная машина имеет малую степень автоматизации испытательных процессов.
Известна ротационная машина с электроприводом для поворота платформы, см. авторское свидетельство СССР №504127 по кл. G 01 М 7/00, опубл. 1976 г.
Эта ротационная машина используется только при испытаниях на вибрацию и на ударные нагрузки.
Известен ротационный стенд для воздействия переменных линейных ускорений, см. авторское свидетельство СССР №1775635 по кл. G 01 М 9/00, опубл. 1992 г.
Функциональные возможности этого стенда ограничены испытанием изделий на воздействие линейных ускорений.
Известна система управления испытательным комплексом, включающим ротационную машину, имеющую ротор с приводом, статор, см. Самсонов Л.М. “Ротационные методы испытаний приборных устройств”. М.: Машиностроение, 1981. 5-8 с.
Данное техническое решение принято за прототип настоящего изобретения.
Однако оно обладает рядом недостатков.
Система прототипа не имеет достаточно широкой функциональности, управление машиной малоэффективно, нет единого испытательного комплекса.
В основу настоящего изобретения положено решение задачи расширения функциональности системы путем объединения оборудования для имитации воздействий в единый комплекс и увеличения набора имитационных воздействий при воспроизведении их в одном цикле испытаний посредством перенастройки (перепрограммирования) оборудования.
Согласно изобретению эта задача решается за счет того, что в системе управления многофункциональным программируемым испытательным комплексом, включающим ротационную машину, имеющую ротор с приводом, статор; привод ротора, обеспечивающий имитацию инерционных воздействий, выполнен реверсивным с пневмосистемой и содержит устройства для имитации механических воздействий, включая гидравлические и пневматические, и устройство генерирования электрических импульсов для создания электрических сигналов, а статор снабжен ударным механизмом для имитации ударных воздействий и оборудованием для пневмосистемы, включающим систему ее управления, кроме того, система управления комплексом содержит центральный управляющий компьютер (ЦУК), связанный с приводом машины контроллерами ротора и статора, при этом контроллер ротора взаимодействует с устройством генерирования электрических импульсов и пневмосистемой, а контроллер статора - с приводом ударного механизма и системой управления пневмосистемой.
Заявителем не выявлены источники, содержащие информацию о технических решениях, идентичных настоящему изобретению, что позволяет сделать вывод о его соответствии критерию “новизна”.
За счет реализации отличительных признаков изобретения (в совокупности с признаками, указанными в ограничительной части формулы) достигаются важные новые свойства объекта.
В предложенном техническом решении расширение функциональности системы достигается использованием имитаций разного рода, как создания электрических сигналов, имитации механических воздействий, включая гидравлические и пневматические, имитации ударных воздействий, при проведении их в одном цикле посредством перепрограммирования за счет использования в системе, объединенных в единый комплекс, привода ротора, оборудования статора, устройств для выполнения различного рода имитаций, систем управления, считывающих и передающих устройств, связанных с центральным управляющим компьютером (ЦУК).
Заявителю не известны какие-либо публикации, которые содержали бы сведения о влиянии отличительных признаков изобретения на достигаемый технический результат. В связи с этим, по мнению заявителя, можно сделать вывод о соответствии заявляемого технического решения критерию “изобретательский уровень”.
Сущность изобретения поясняется чертежами, где изображены:
на фиг.1 - принципиальная схема системы;
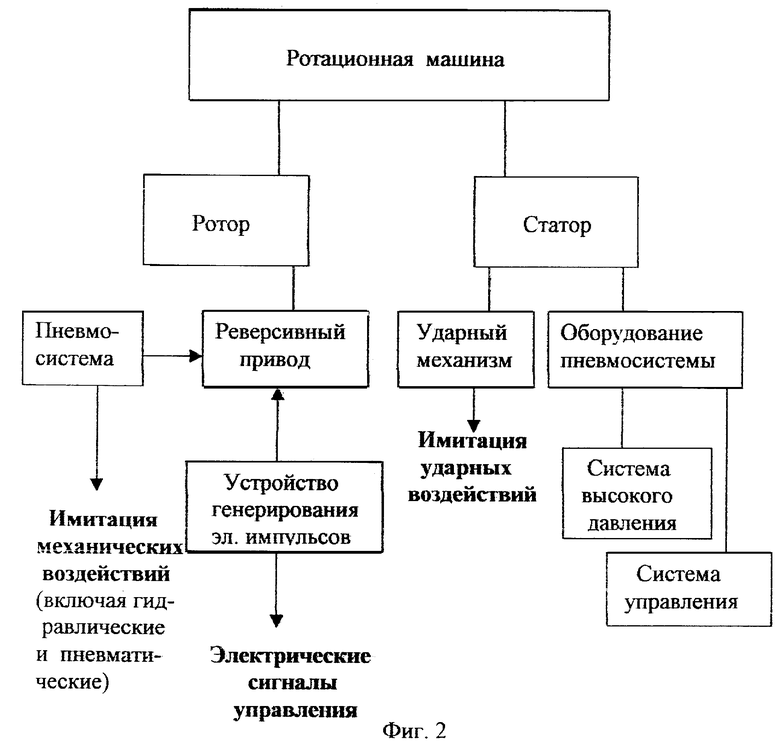
на фиг.2 - функциональная схема ротационной машины;
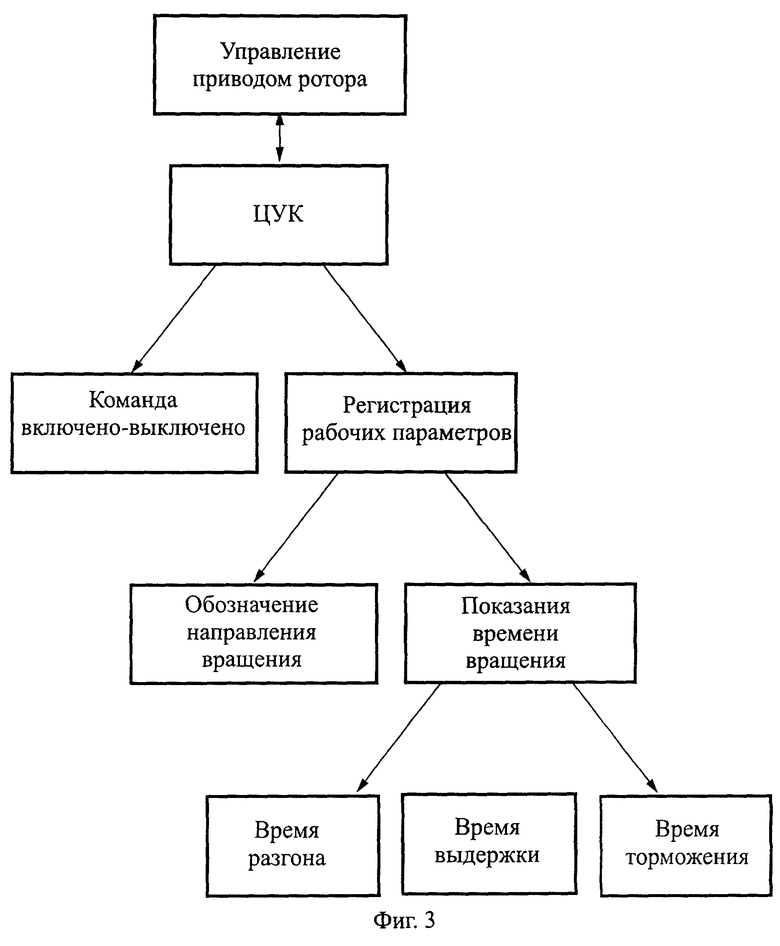
на фиг.3 - структурная схема управления приводом ротора.
Испытательный комплекс содержит ротационную машину 1, ротор 2, реверсивный привод 3, статор 4, пневмосистему 5, устройство генерирования электрических импульсов 6, ударный механизм 7, привод ударного механизма 8, оборудование пневмосистемы (на статоре) 9, систему управления пневмосистемой 10, систему воздуха высокого давления 11, управляющий компьютер 12, частотно-регулируемый привод 13, контроллер ротора 14, контроллер статора 15.
Ротационная машина 1 содержит ротор 2 с реверсивным приводом 3 и статор 4. Привод ротора 3, осуществляющий имитацию инерционных воздействий, обеспечивает позиционирование ротора 2 для имитации механических воздействий, включая гидравлические и пневматические, с помощью пневмосистемы 5 и содержит устройство генерирования электрических импульсов 6 для создания электрических сигналов. На статоре 4 установлен ударный механизм 7 с приводом 8 для имитации ударных воздействий и оборудование пневмосистемы 9, включающее систему воздуха высокого давления 11 и систему управления пневмосистемой 10. Система управления испытательным комплексом содержит центральный управляющий компьютер (ЦУК) 12. На роторе 2 ротационной машины 1 установлен контроллер 14, а на статоре 4 - контроллер 15. ЦУК 12 связан с частотно-регулируемым приводом 13 машины 1 посредством контроллеров 14 и 15. ЦУК 12 выполнен на базе стандартного персонального компьютера, имеющего промышленное использование, и функционирует под управлением операционной системы.
Управление испытательным комплексом осуществляется следующим образом.
Система управления испытательным комплексом обеспечивает централизованное управление ротационной машиной 1 и всем установленным на ней испытательным оборудованием.
Привод ротора 3, предназначенный для вращения ротора 2, обеспечивает имитацию требуемого инерционного воздействия (перегрузки) на изделие. Для обеспечения нормального воспроизведения инерционных перегрузок привод ротора 3 осуществляет динамическую балансировку ротора 2. Кроме того, привод ротора 3 осуществляет позиционирование ротора 2 в определенное положение относительно статора 4 ротационной машины 1. При воспроизведении инерционных воздействий используются типовые режимы работы привода 3, какими являются разгон и торможение с кратковременным и гарантированным достижением скорости требуемой перегрузки. Ускорения разгона и торможения практически не ограничены требованиями плавности нарастания и спада перегрузки, а лимитируются энергетическими возможностями привода ротора 3 и моментом инерции ротора 2.
Имитацию механических воздействий осуществляет пневмосистема 5, взаимодействующая с приводом 3. На приводе 3 установлено также устройство генерирования электрических импульсов 6 для имитации электрических сигналов.
Имитацию ударных воздействий осуществляет ударный механизм 7, установленный на статоре 4.
ЦУК 11 связан с частотно-регулируемым приводом 12 ротационной машины 1 контроллером 13, установленным на роторе 2 и контроллером 14, установленным на статоре 4. Все действия контроллеров 13 и 14 подчинены командам управления, поступающим от ЦУК 11. Этим обеспечивается возможность реализации неограниченного многообразия программ испытаний изделий только путем видоизменения программы работы ЦУК 11.
Через контроллер 13 осуществляется управление приводом ротора 3. С учетом типовых режимов работы, а также требований бесконтактности и компьютерного управления управление приводом ротора 3 реализуется на базе трехфазного асинхронного электродвигателя и частотно-регулируемого преобразователя (инвертора). Управление приводом ротора 3 состоит в передаче команд включения-выключения двигателя и регистрации рабочих параметров. Регистрация рабочих параметров определяет обозначение направления вращения ротора 2 и показания времени вращения. Показания времени вращения указывают на время разгона до необходимой скорости, время выдержки заданной частоты вращения и время торможения /см. фиг.3/.
В процессе работы привода производится периодический запрос и считывание основных параметров работы двигателя для контроля за его состоянием и получения информации о текущей скорости вращения ротора. В неординарных ситуациях выдается команда экстренного торможения и выключения привода 2.
Контроллер статора 15 осуществляет управление оборудованием пневмосистемы 9, расположенным на статоре 4. К нему относятся система воздуха высокого давления 11 и система управления пневмосистемой 10. Контроллер статора 15 осуществляет управление приводом ударного механизма 8. Кроме того, контроллер 15 считывает и передает в ЦУК 11 показания датчиков дисбаланса, входящего в систему автобалансировки ротора.
В предложенной системе управления испытательным комплексом использованы конструктивные узлы, элементы, приборы и оборудование, широко применяемые при управлении и автоматизации испытательными процессами, что обуславливает, по мнению заявителя, ее соответствие критерию “промышленная применимость”.
Использование заявленного технического решения позволяет
- расширить функциональные возможности системы путем проведения полного цикла испытаний - линейные инерционные перегрузки, механические нагрузки, электрические сигналы, ударные воздействия;
- объединить оборудование для имитации воздействий, используемых при испытании изделий, особенно в условиях потребителей, в единый автоматизированный комплекс;
- воспроизводить в одном цикле весь набор воздействий, используемых при испытаниях того или иного типа изделия, с возможностью расширения номенклатуры изделий (набора воздействий) путем перенастройки (перепрограммирования) оборудования;
- обеспечить централизованное управление и автоматизацию проведения испытательного процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ РОТАЦИОННЫЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2001 |
|
RU2221235C2 |
| Экспериментальный стенд для испытаний вакуумных присосок различных конструктивов и материалов на кручение в различных средах | 2024 |
|
RU2841057C1 |
| Контрольно-проверочный комплекс проверки автопилота | 2016 |
|
RU2615850C1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ И ИСПЫТАНИЯ ЭЛЕКТРОПРИВОДОВ | 2012 |
|
RU2521788C2 |
| Способ акустических испытаний автомобильного электрогенератора | 2022 |
|
RU2798588C1 |
| Стенд для испытания электроприводов | 2020 |
|
RU2737738C1 |
| СПОСОБ СТЕНДОВОЙ ОТРАБОТКИ УПРАВЛЯЕМЫХ ПО ЛАЗЕРНОМУ ЛУЧУ РАКЕТ, МИКРОПОЛИГОН И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2299475C2 |
| Стенд для испытания ударных машин | 1989 |
|
SU1645494A1 |
| СТЕНД С ЭЛЕКТРОМАГНИТНЫМ НАГРУЗОЧНЫМ МОДУЛЕМ ДЛЯ ИССЛЕДОВАНИЯ И ИСПЫТАНИЯ ЭЛЕКТРОПРИВОДОВ | 2010 |
|
RU2442995C2 |
| Стенд универсальный автоматизированный энергосберегающий | 2024 |
|
RU2840012C1 |
Изобретение относится к испытательной технике, а именно к схемам управления ротационной машиной и оборудованием при проведении многофункциональных воздействий на испытываемые изделия. Технический результат заключается в расширении функциональных возможностей системы за счет проведения полного цикла испытаний. Система включает ротационную машину с ротором и статором. Привод ротора выполнен реверсивным с пневмосистемой и содержит устройства для имитации механических воздействий, включая гидравлические и пневматические, и устройство генерирования электрических импульсов для создания электрических сигналов управления, а статор снабжен ударным механизмом для имитации ударных воздействий и оборудованием для пневмосистемы, включающим систему ее управления. Система управления комплексом содержит центральный управляющий компьютер (ЦУК), связанный с приводом машины контроллерами ротора и статора, при этом контроллер ротора взаимодействует с устройством генерирования электрических импульсов и пневмосистемой, а контроллер статора - с приводом ударного механизма и системой управления пневмосистемой. 3 ил.

Система управления многофункциональным программируемым испытательным комплексом, включающим ротационную машину, имеющую основание (статор), ротор, привод ротора, и испытательное оборудование, содержащая устройства управления, отличающаяся тем, что привод ротора выполнен с устройствами имитаций инерционного и электрического воздействий и пневмосистемой, включающей устройства имитаций гидравлического и механического воздействий, статор выполнен с приводом ударного механизма, а система управления содержит центральный управляющий компьютер (ЦУК), связанный с приводом ротора и статором посредством контроллеров ротора и статора, соответственно, подчиненных поступающим от ЦУК командам работы двигателя привода ротора, например, сигнал включения - выключения двигателя, и регистрация рабочих параметров ротора, например, обозначение направления вращения ротора, показания времени разгона до необходимой скорости, выдержки заданной частоты вращения и торможения, контроллер ротора предназначен для управления устройством имитации электрического воздействия и устройствами имитаций гидравлического и механического воздействий, установленными на роторе, а контроллер статора предназначен для управления регулирующими и контролирующими элементами пневмосистемы и приводом ударного механизма, установленным на статоре.
| САМСОНОВ Л.М | |||
| и др | |||
| Ротационные методы испытаний приборных устройств | |||
| - М.: Машиностроение, 1981, с.5-8 | |||
| Центробежный стенд для испытания изделий на воздействие переменных линейных ускорений | 1990 |
|
SU1775635A1 |
| Центробежный стенд для испытаний изделий на линейные ускорения | 1973 |
|
SU504127A1 |
| US 3745832 А, 17.07.1973 | |||
| СПОСОБ ИЗМЕРЕНИЯ ПОПЕРЕЧНОГО ПРОФИЛЯ ИЗДЕЛИЯ | 2003 |
|
RU2240496C1 |

