Изобретение относится к радиолокации, в частности к области моноимпульсных вторичных радиолокаторов (МРЛ), обладающих повышенной точностью измерения угловых координат, и может быть использовано в системах управления воздушным движением.
Одним из перспективных типов МРЛ, обладающих высокой точностью, является МРЛ со сквозными фазовыми каналами, в которых производится автоматическая подстройка фазы, осуществляемая по внешним контрольным сигналам вынесенного контрольного ответчика (КО), местоположение которого точно известно [1, 2].
МРЛ указанного типа будем в дальнейшем именовать как МРЛ со сквозными фазовыми каналами (МРЛ СФК).
Наиболее близким к заявляемому является МРЛ по патенту [2], который принимается за прототип.
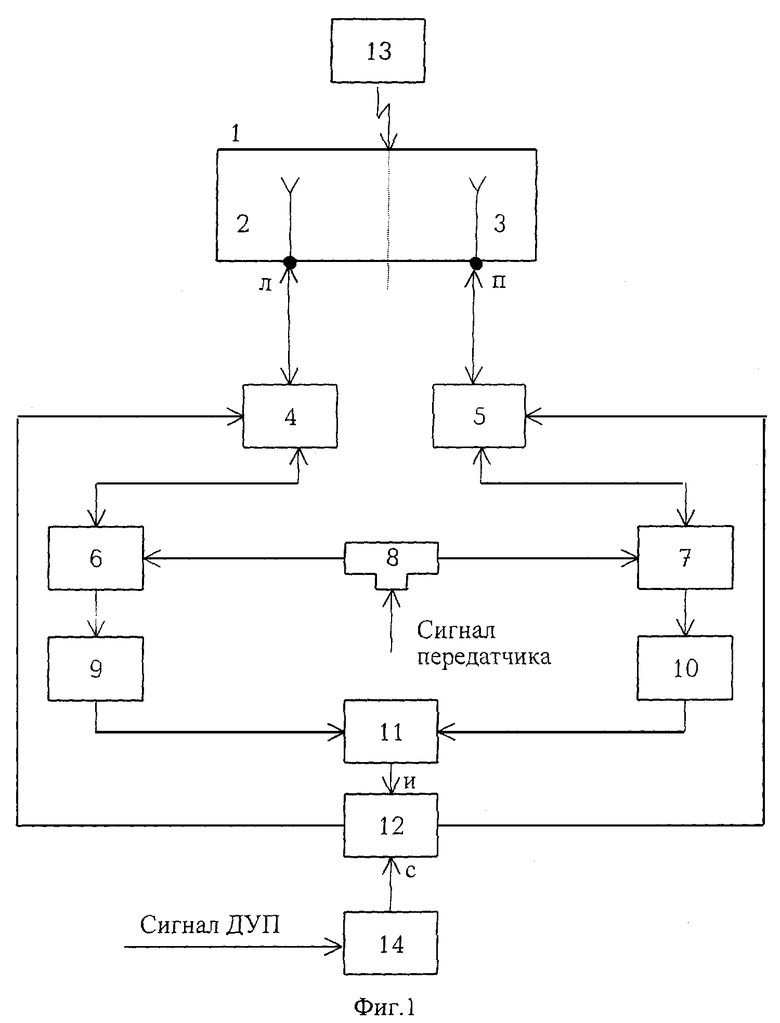
Устройство-прототип содержит (фиг.1) антенну 1, выполненную в виде двух идентичных каналов - левого 2 и правого 3 относительно направления излучения, каждый из которых расположен симметрично относительно оси антенны, с возможностью формирования двух одинаковых независимых диаграмм направленности с разнесенными фазовыми центрами, выходы левого и правого каналов антенны через соответственно первый 4 и второй 5 управляемые фазовращатели соединены с общими выводами первого 6 и второго 7 переключателей прием-передача, передающие выводы которых подключены к соответствующим выходам равноплечного делителя мощности 8, вход которого является входом сигнала передатчика, приемные выходы упомянутых переключателей прием-передача подключены соответственно к входам первого 9 и второго 10 усилителей, выходы которых подключены к входам фазового детектора 11, выход которого подключен к информационному входу узла автоматической подстройки фазы 12, первый и второй выходы которого подключены к входам первого 4 и второго 5 управляемых фазовращателей, контрольный ответчик 13, используемый в качестве генератора внешнего контрольного сигнала, формирователь строба КО 14, выход которого подключен к стробирующему входу узла автоматической подстройки фазы 12, а вход соединен с выходом датчика углового положения (ДУП) антенны 1.
В МРЛ СФК причиной основной нестабильности пеленгационной характеристики является фазовая нестабильность сквозных каналов, которая приводит к перемещению пеленгационной характеристики параллельно самой себе и появлению ошибок измерения азимута.
Автоматическая подстройка фаз в сквозных каналах возвращает пеленгационную характеристику на исходную позицию, осуществляя при этом стабилизацию ее положения относительно равносигнального направления антенны.
Однако, помимо основной причины ошибки, вызванной уходом фаз и приводящей к изменению положения пеленгационной характеристики, на точность измерения азимута влияет также наклон пеленгационной характеристики и нарушение симметрии ее ветвей.
Пеленгационную характеристику МРЛ СФК удобно изобразить (см. фиг.2) как функцию

где Qист - истинное значение угла прихода сигнала;
Qизм - измеренное значение угла прихода сигнала.
При отсутствии ошибок Qизм=Qист и зависимость (1) является прямой, проходящей через начало координат под углом наклона 45° (фиг.2а).
На фиг.2б, в, г показан вид пеленгационной характеристики при нарушении соответственно ее положения относительно начала координат, наклона и симметрии ветвей.
При нарушении положения относительно начала координат (физически это означает нарушение положения относительно равносигнального направления) характеристика перемещается параллельно самой себе, при нарушении наклона характеристика поворачивается вокруг начала координат, при нарушении симметрии ветвей линейная характеристика претерпевает излом в начале координат.
Нарушение наклона и симметрии пеленгационной характеристики в МРЛ СФК могут происходить лишь вследствие изменений амплитудно-фазового распределения поля в раскрыве антенны и характеристик фазового детектора, то есть искажений на входе и выходе сквозных каналов.
Эти искажения, по сравнению с фазовыми искажениями в сквозных каналах, появляются достаточно слабо, но с ними необходимо считаться.
В МРЛ-прототипе для устранения ошибок, вызванных изменением наклона пеленгационной характеристики и ее симметрии, приходится периодически проверять форму пеленгационной характеристики и осуществлять ручную подстройку, что усложняет условия эксплуатации и не всегда позволяет обнаруживать ошибки в момент их появления.
Задачей заявленного изобретения является дальнейшее повышение точности измерения азимута и упрощение условий эксплуатации МРЛ СФК, что достигается путем одновременной автоматической подстройки положения пеленгационной характеристики относительно начала координат и ее наклона.
Поставленная задача решается следующим образом.
В моноимпульсный радиолокатор со сквозными фазовыми каналами, содержащий антенну, выполненную в виде двух идентичных каналов - левого и правого относительно направления излучения, каждый из которых расположен симметрично относительно оси антенны, с возможностью формирования двух одинаковых независимых диаграмм направленности с разнесенными фазовыми центрами, выходы левого и правого каналов антенны через соответственно первый и второй управляемые фазовращатели соединены с общими выводами первого и второго переключателей прием - передача, передающие выводы которых подключены к соответствующим выходам равноплечного делителя мощности, вход которого является входом сигнала передатчика, приемные выходы упомянутых переключателей прием - передача подключены соответственно к входам первого и второго усилителей, выходы которых подключены к входам фазового детектора, узел автоматической подстройки фазы, первый и второй выходы которого подключены к входам первого и второго управляемых фазовращателей, контрольный ответчик, используемый в качестве генератора внешнего контрольного сигнала, и первый формирователь строба КО, вход которого соединен с выходом датчика углового положения антенны, введены второй формирователь строба КО, аналого-цифровой преобразователь, узел коррекции наклона пеленгационной характеристики, а узел автоматической подстройки фазы выполнен с первым и вторым стробирующими входами и дополнительным выходом, при этом выход фазового детектора через аналого-цифровой преобразователь соединен с информационным входом узла коррекции наклона пеленгационной характеристики, корректирующий вход которого соединен с дополнительным выходом узла автоматической подстройки фазы, а выход узла коррекции наклона пеленгационной характеристики соединен с информационным входом узла автоматической подстройки фазы, первый и второй стробирующие входы которого соединены соответственно с выходами первого и второго формирователей стробов контрольного ответчика, входы которых соединены между собой.
Предложен вариант моноимпульсного радиолокатора, в котором узел автоматической подстройки фазы выполнен двухканальным и содержит в первом канале соединенные последовательно клеммами "выход - вход" первый вычислитель ошибки, первый усреднитель ошибки, узел полусуммы, первый сумматор, первый преобразователь кода, схему управления формирователями, при этом выход первого сумматора через первый регистр накопленной ошибки соединен с его дополнительным входом, выходы схемы управления фазовращателями образуют первый и второй выходы узла автоматической подстройки фазы, а во втором канале - соединенные последовательно клеммами "выход - вход" второй вычислитель ошибки, второй усреднитель ошибки, узел полуразности, второй сумматор, второй преобразователь кода, при этом выход второго сумматора через второй регистр накопленной ошибки соединен с его дополнительным входом, выход второго преобразователя кода образует дополнительный выход узла автоматической подстройки фазы, при этом введены перекрестные связи между первым и вторым каналами, соединяющие выход первого усреднителя ошибки одновременно с дополнительным входом узла полуразности, а выход второго усреднителя ошибки одновременно с дополнительным входом узла полусуммы, информационные входы первого и второго вычислителей ошибки соединены с информационным входом автоматической подстройки фазы, а их стробирующие входы образуют соответственно первый и второй стробирующие входы узла автоматической подстройки фазы.
Работа заявляемого устройства поясняется фиг.1а, 3, 4, 5.
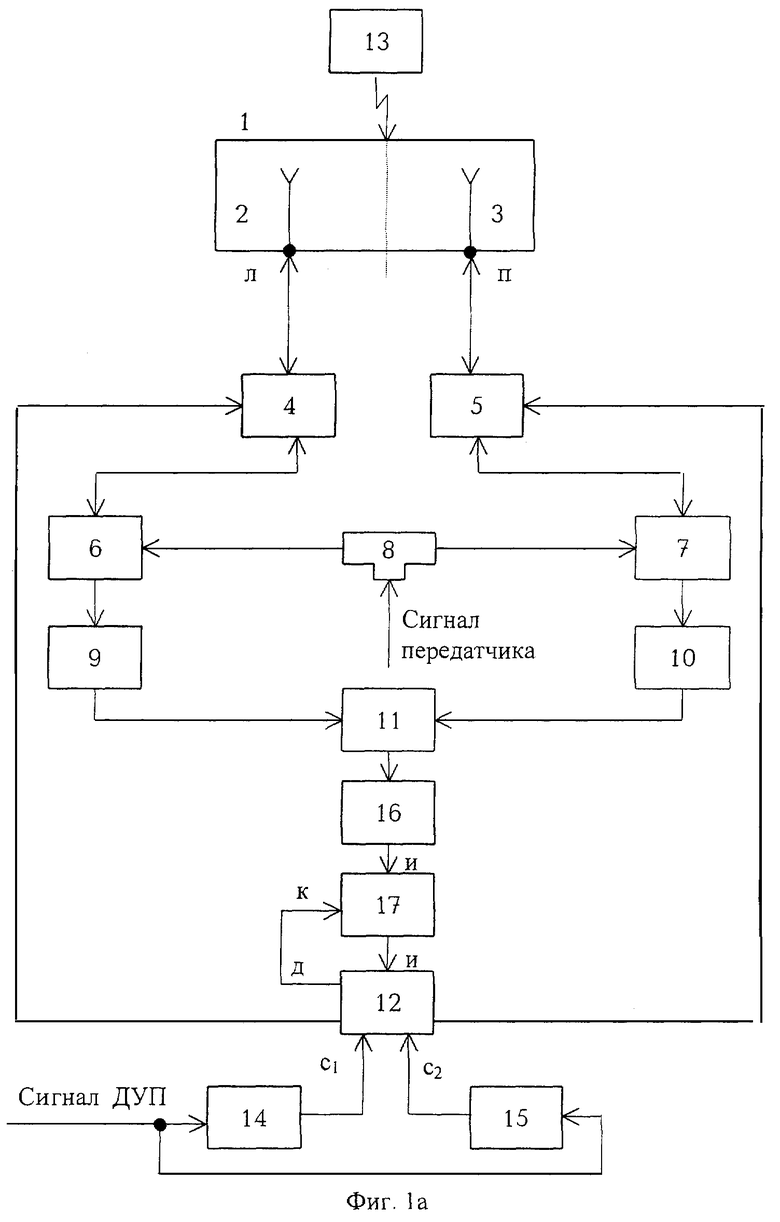
Моноимпульсный радиолокатор со сквозными фазовыми каналами (фиг.1 а), содержащий антенну 1, выполненную в виде двух идентичных каналов - левого 2 и правого 3 относительно направления излучения, каждый из которых расположен симметрично относительно оси антенны, с возможностью формирования двух одинаковых независимых диаграмм направленности с разнесенными фазовыми центрами, выходы левого и правого каналов антенны через соответственно первый 4 и второй 5 управляемые фазовращатели соединены с общими выводами первого 6 и второго 7 переключателей прием-передача, передающие выводы которых подключены к соответствующим выходам равноплечного делителя мощности 8, вход которого является входом сигнала передатчика, приемные выходы упомянутых переключателей прием-передача подключены соответственно к входам первого 9 и второго 10 усилителей, выходы которых подключены к входам фазового детектора 11, узел автоматической подстройки фазы 12, первый и второй выходы которого подключены к входам первого и второго управляемых фазовращателей 4 и 5, контрольный ответчик 13, используемый в качестве генератора внешнего контрольного сигнала, первый 14 и второй 15 формирователи стробов контрольного ответчика, соединенные входами между собой и с выходом ДУП антенны, аналого-цифровой преобразователь 16, узел коррекции наклона пеленгационной характеристики 17, а узел автоматической подстройки фазы 12 выполнен с первым и вторым стробирующими входами (с1, с2) и дополнительным выходом (д), при этом выход фазового детектора 11 через аналого-цифровой преобразователь 16 соединен с информационным входом (и) узла коррекции наклона пеленгационной характеристики 17, корректирующий вход (к) которого соединен с дополнительным выходом (д) узла автоматической подстройки фазы 12, а выход (к) узла коррекции наклона пеленгационной характеристики 17 соединен с информационным входом (и) узла автоматической подстройки фазы 12, первый и второй стробирующие входы (с1, с2) которого соединены соответственно с выходами первого и второго формирователей стробов контрольного ответчика 14 и 15.
ДУП содержит информацию об азимуте антенны относительно направления на север, так же, как и в прототипе.
В варианте моноимпульсного радиолокатора, представленном на фиг.3, узел автоматической подстройки фазы 12 выполнен двухканальным. Он содержит в первом канале соединенные последовательно клеммами "выход - вход" первый вычислитель ошибки 18, первый усреднитель ошибки 19, узел полусуммы 20, первый сумматор 21, первый преобразователь кода 22, схему управления фазовращателями 23, при этом выход первого сумматора 21 через первый регистр накопленной ошибки 24 соединен с его дополнительным входом, выходы схемы управления фазовращателями 23 образуют первый и второй выходы узла автоматической подстройки фазы, во втором канале - соединенные последовательно клеммами "вход - выход" второй вычислитель ошибки 25, второй усреднитель ошибки 26, узел полуразности 27, второй сумматор 28, второй преобразователь кода 29, при этом выход второго сумматора 28 через второй регистр накопленной ошибки 30 соединен с дополнительным его входом, выход второго преобразователя кода 29 образует дополнительный выход (д) узла автоматической подстройки фазы 12, при этом введены перекрестные связи между первым и вторым каналами - выход первого усреднителя ошибки 19 соединен одновременно с дополнительным входом (д2) узла полуразности 27, а выход второго усреднителя ошибки 26 соединен одновременно с дополнительным входом (д2) узла полусуммы 20, информационные входы первого и второго вычислителей ошибки соединены с информационным входом (и) узла автоматической подстройки фазы 12, а их стробирующие входы образуют соответственно первый (с1) и второй (с2) стробирующие входы узла автоматической подстройки фазы 12.
В динамике устройство работает следующим образом.
Благодаря разнесению фазовых центров диаграмм левого 2 и правого 3 каналов антенны 1 (см. фиг.1а), в заявленном устройстве осуществляется фазовая пеленгация принимаемых сигналов, в результате которой информация об угле прихода сигналов Θ закладывается в фазовые сдвиги между сигналами каналов ϕ.
Автоматическая подстройка фазы в сквозных фазовых каналах, осуществляемая по сигналам контрольного ответчика 13 с помощью узла 12 и управляемых фазовращателей 4 и 5, позволяет сохранить фазовые сдвиги между сигналами в процессе их прохождения через левые 2, 4, 6, 9 и правые 3, 5, 7, 10 узлы каналов. Сигналы контрольного ответчика выделяются в узле 12 с помощью формирователей стробов КО 14 и 15.
Напряжение U, образующееся на выходе фазового детектора 11, является функцией сдвига фаз между сигналами каналов ϕ.
Зависимость

представляет собой пеленгационную характеристику [в более общем виде пеленгационная характеристика представляется функцией (1)].
В результате автоматической подстройки фазы стабилизируется положение пеленгационной характеристики относительно начала координат.
Аналогично описанному происходит работа и в прототипе [2].
Однако, как указывалось ранее, на точность измерения сказываются не только ошибки положения пеленгационной характеристики относительно начала координат, но и ошибки в наклоне, а также ошибки, вызванные нарушением симметрии ветвей пеленгационной характеристики.
Для возможности осуществить одновременную автоматическую подстройку не только положения пеленгационной характеристики, но и ее наклона, используя при этом единые внешние контрольные сигналы, необходимо осуществлять измерение ошибок в двух точках пеленгационной характеристики, находящихся на разных участках относительно начала координат. Пеленгационная характеристика представляет собой прямую линию, и ее местоположение на осях координат полностью характеризуется двумя точками.
Выбор участков, на которых осуществляется измерение ошибок, наиболее целесообразно производить в средних точках левой и правой ветвей пеленгационной характеристики. Это позволяет не только стабилизировать положение пеленгационной характеристики относительно начала координат и ее наклона, но и наиболее оптимально минимизировать ошибки, вызванные асимметрией ветвей.
Таким образом, если в прототипе измерение ошибок осуществлялось в центре пеленгационной характеристики с помощью одного центрального азимутального строба контрольного ответчика, то в заявленном МРЛ оно осуществляется с помощью двух смещенных относительно равносигнального направления азимутальных стробов, соответствующих средним точкам ветвей пеленгационной характеристики (см. фиг.2а).
Азимутальные стробы, поступающие на входы (c1 и с2), вырабатываются в 1-м и 2-м формирователях строба КО 14 и 15. В каждом из формирователей строба КО 14 и 15 устанавливается постоянное запоминающее устройство (ПЗУ), в которое записывается известное угловое положение КО. На входы формирователей строба КО 14 и 15 от датчика углового положения антенны подается сигнал текущего углового положения антенны.
Момент формирования азимутальных стробов определяется хранящейся в ПЗУ информацией об угловом положении КО и сигналом текущего углового положения антенны.
В заявленном МРЛ выходное аналоговое напряжение фазового детектора преобразуется в аналого-цифровом преобразователе 16 в цифровой параллельный код, который через узел коррекции наклона пеленгационной характеристики 17 поступает на вычислители 18 и 25 узла автоматической подстройки фазы 12, стробируемые соответственно первым и вторым формирователями строба контрольного ответчика 14 и 15, и далее - на усреднители ошибок 19 и 26 (см. фиг.3).
Усредненные сигналы ошибок, вычисленных в средних точках левой и правой ветвей пеленгационной характеристики, подвергаются преобразованиям. Из них в узлах 20, 27 образуются соответственно полусумма и полуразность ошибок.
Ошибка полусуммы поступает на сумматор 21, где складывается с накопленной ранее ошибкой, хранящейся в регистре накопленной ошибки 24, и после преобразователя кода 22 поступает на схему управления фазовращателями 23, выходные сигналы которой воздействуют на управляемые фазовращатели 4 и 5, изменяющие положение пеленгационной характеристики относительно равносигнального направления.
Ошибка полуразности поступает на сумматор 28, где складывается с накопленной ошибкой, хранящейся в регистре накопленной ошибки 30, и после преобразователя 29 поступает через дополнительный выход (д) на узел коррекции наклона пеленгационной характеристики 17.
Необходимо отметить, что полусумма и полуразность ошибок обладают особыми свойствами.
Полусумма ошибок слева и справа однозначно отражает изменение положения пеленгационной характеристики относительно начала координат и не зависит от изменения ее наклона.
Ошибка полусуммы корректирует положение пеленгационной характеристики, перемещая ее параллельно самой себе, и сводит ошибку, вызванную изменением положения, к нулю. При этом ошибки в средних точках ветвей пеленгационной характеристики, слева и справа, либо обращаются в ноль, либо будут иметь равные величины и противоположные знаки, то есть будут представлять собой ошибки наклона (фиг.2в).
Полуразность ошибок слева и справа однозначно отражает изменение наклона пеленгационной характеристики и не зависит от изменения ее положения относительно начала координат.
Ошибка полуразности корректирует наклон пеленгационной характеристики, вращая ее относительно начала координат, и сводит ошибку, вызванную изменением наклона, к нулю. При этом ошибки в средних точках ветвей пеленгационной характеристики, слева и справа, либо обращаются в ноль, либо будут иметь равные величины и одинаковые знаки, то есть будут представлять собой ошибки положения пеленгационной характеристики относительно начала координат (фиг.2б).
Процессы, происходящие при автоматической подстройке положения и наклона пеленгационной характеристики, наглядно иллюстрируются на фиг.4 и 5.
Эти процессы могут происходить как одновременно в одном обороте антенны, так и последовательно в соседних оборотах. При этом вначале может происходить подстройка положения, а затем подстройка наклона, и наоборот, вначале подстройка наклона, а затем подстройка положения.
На фиг.4б показан промежуточный результат, полученный после подстройки положения, осуществленный путем смещения пеленгационной характеристики вправо вдоль оси абсцисс. В итоге ошибки положения устранены, но сохранились ошибки наклона.
На фиг.4в показан промежуточный результат, полученный после подстройки наклона, осуществленный путем поворота пеленгационной характеристики (по часовой стрелке). В итоге ошибки наклона устранены, но сохранились ошибки положения.
На фиг.4г показан окончательный результат, полученный после подстройки наклона или после подстройки положения. В итоге ошибки положения и наклона устранены по всей длине пеленгационной характеристики.
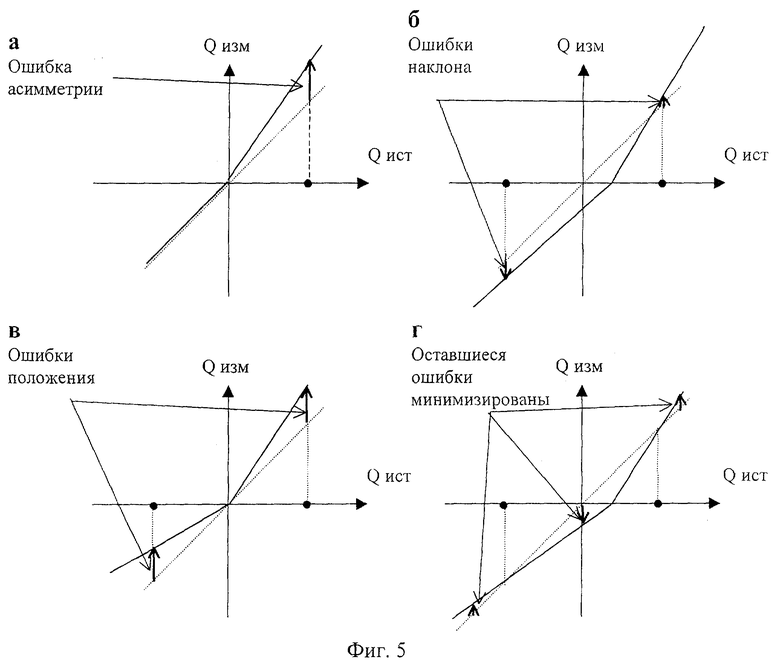
На фиг.5а изображен случай, когда пеленгационная характеристика асимметрична и аппроксимируется двумя отрезками прямых с изгибом в начале координат.
В этом случае полное устранение ошибок возможно не по всей длине пеленгационной характеристики, а лишь в двух средних точках ее ветвей, в которых осуществляется измерение ошибок. На краях же ветвей и в начале координат сохраняются небольшие ошибки противоположных знаков, величины которых примерно в четыре раза меньше первоначальной ошибки на краю ветви, вызванной изломом пеленгационной характеристики.
На фиг.5б ошибки положения устранены, но сохранились ошибки наклона, имеющие равные величины и противоположные знаки.
На фиг.5в ошибки наклона устранены, но сохранились ошибки положения, имеющие равные величины и знаки.
На фиг.5г ошибки положения и наклона в средних точках ветвей пеленгационной характеристики устранены, а ошибки на краях и в центре сведены к минимуму.
Таким образом, в заявленном МРЛ осуществляется одновременная подстройка положения пеленгационной характеристики относительно начала координат и ее наклона, которая в случае линейной пеленгационной характеристики сводит ошибки положения и наклона к нулю по всей ее длине, а в случае излома пеленгационной характеристики сводит к нулю ошибки положения и наклона в средних точках ветвей характеристики и минимизирует ошибки по всей ее длине.
Первый и второй формирователи стробов КО 14 и 15 выполнены идентичными и реализуются на двоичных счетчиках с асинхронным обнулением (микросхема 1533ИЕ10) и на ПЗУ (микросхема 27С516).
Импульс строба КО вырабатывается непосредственно ПЗУ, срабатывание которого во времени определяется сигналом от упомянутого двоичного счетчика.
Узлы полусуммы и полуразности 20 и 27 выполнены на микросхемах сумматоров 133ИМЗ.
Остальные узлы полностью идентичны с аналогичными узлами прототипа.
Проведенная на опытном образце экспериментальная проверка работоспособности заявленного МРЛ СФК подтвердила правильность заложенных принципов и возможность их промышленной реализации. Среднеквадратичное значение аппаратурной ошибки измерения азимута не превысило 2-х угловых минут.
Использование предложенного МРЛ позволит осуществить дальнейшее повышение точности измерения азимута и упростить условия эксплуатации, так как при одновременной автоподстройке положения и наклона пеленгационной характеристики отпадает необходимость в периодической проверке формы пеленгационной характеристики и ее ручной корректировке, а также использования для оценки точности МРЛ дорогих и сложных внешнетраекторных измерений.
Заявленный МРЛ найдет широкое применение в системах управления воздушным движением.
ИСТОЧНИКИ ИНФОРМАЦИИ, ПРИНЯТЫЕ ВО ВНИМАНИЕ
[1] Патент РФ №2155355, кл. G 01 S 13/44, 7/44, заявл. 02.08.1999, опубл. 27.08.2000, Бюл. №24.
[2] Патент РФ №2122218, кл. G 01 S 13/44, заявл. 14.08.97, опубл. 20.11.98, Бюл. №32.
| название | год | авторы | номер документа |
|---|---|---|---|
| КВАЗИМОНОИМПУЛЬСНЫЙ ВТОРИЧНЫЙ РАДИОЛОКАТОР | 2016 |
|
RU2622399C1 |
| МОНОИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 1997 |
|
RU2122218C1 |
| МОНОИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 1999 |
|
RU2155355C1 |
| МОНОИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 2000 |
|
RU2183329C1 |
| МОНОИМПУЛЬСНЫЙ РАДИОЛОКАТОР СО СКВОЗНЫМИ ФАЗОВЫМИ КАНАЛАМИ | 2002 |
|
RU2232404C1 |
| МОНОИМПУЛЬСНАЯ СИСТЕМА СО СВЕРХРЕГЕНЕРАТИВНЫМ ОТВЕТЧИКОМ | 2007 |
|
RU2368916C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С АВТОМАТИЧЕСКОЙ КАЛИБРОВКОЙ | 2008 |
|
RU2389038C2 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| Облучающая система следящей зеркальной антенны | 2023 |
|
RU2802763C1 |



Изобретение относится к области радиолокации, а именно к области вторичных моноимпульсных радиолокаторов (МРЛ) со сквозными фазовыми каналами (СФК), в которых по сигналам вынесенного контрольного ответчика осуществляется автоматическая подстройка фазы (АПФ). Достигаемым техническим результатом является повышение точности измерения азимута и упрощение условий эксплуатации благодаря одновременной автоматической подстройке положения пеленгационной характеристики (ПХ) относительно начала координат и ее наклона. В МРЛ, содержащем антенну из левого и правого каналов, составляющих параллельные СФК с узлами управляемых фазовращателей, переключателей прием-передача, усилителей, а также содержащем фазовый детектор и узел АПФ, при этом выход через введенные АЦП и узел коррекции соединен с информационным входом, стробирующие входы которого соединены с выходами формирователей стробов, с помощью узлов формируется полусумма и полуразность ошибок, измеренных в средних точках левой и правой ветвей ПХ. С помощью полусуммы ошибок осуществляется автоматическая подстройка положения ПХ относительно начала координат, а с помощью полуразности ошибок корректируется наклон ПХ. 1 з.п. ф-лы, 6 ил.
| МОНОИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 1997 |
|
RU2122218C1 |

