Изобретение относится к радиотехнике, а именно к радиолокации, и может быть использовано для определения угловых координат радиотехническими методами, например, аэрологических радиозондов (АРЗ), также может быть использовано для сопровождения АРЗ по угловым координатам.
Общеизвестен метод определения угловых координат методом равно-сигнальной зоны АРЗ, снабженного сверхрегенеративным приемопередатчиком путем конического сканирования диаграммы направленности параболической антенны РЛС. При вращении облучателя, смещенного относительно фокуса антенны, образуется коническая поверхность, ось которой совпадает с равносигнальным направлением. Признаком точного наведения антенны на радиозонд является постоянная амплитуда сигнала на выходе приемного устройства РЛС, см. А.А.Ефимов «Принципы работы аэрологического информационно-вычислительного комплекса АВК-1», М.: Гидрометеоиздат, 1989 г., стр.12-27. Недостатком такого метода является ухудшение точности измерения угловых координат вследствие влияния амплитудных флуктуаций сигнала на больших дальностях.
Известен моноимпульсный метод измерения угловых координат на основе амплитудных и фазовых дискриминаторов с суммарно-разностной обработкой, см. кн. «Информационные технологии в радиотехнических системах». /Под. ред. И.Б.Федорова. - М.: Изд-во МГТУ им. Н.Э.Баумана, 2003. - 672 с. - прототип.
Технической задачей изобретения является повышение точности измерения угловых координат, снижение запросной мощности передатчика РЛС, повышение помехоустойчивости комплекса и скрытности работы.
Отечественные системы радиозондирования атмосферы (СР) построены на основе угломерно-дальномерного принципа и совмещенного радиоканала. Это обеспечивается применением в составе радиозондов сверхрегенеративных приемопередатчиков-ответчиков (СПП), которые позволяют реализовать радиоимпульсный метод измерения наклонной дальности и одновременно осуществлять передачу телеметрической информации [1].
Важным требованием, предъявляемым к перспективной системе радиозондирования (СР) атмосферы, является высокая точность измерения высоты подъема радиозонда. Существует возможность практического построения СР на импульсно-фазовом принципе построения канала измерения дальности. Это позволяет повысить реальную чувствительность СПП радиозонда, соответственно снизить мощность передатчика запросного сигнала РЛС, обеспечить, при необходимости, сопровождение радиозонда, определяя мгновенную скорость его движения в атмосфере. Весьма существенно то, что осуществление приема когерентных ответных радиоимпульсов СПП позволяет построить систему измерения угловых координат на моноимпульсном принципе. Как известно, моноимпульсный метод позволяет приблизительно в 1.4-1.8 раза повысить точность определения угловых координат цели и на 2-3 дБ повысить уровень потенциала радиоканала в сравнении с методом равносигнальной зоны (конического сканирования) [3, 4].
Необходимо сделать пояснения особенностей работы предлагаемой моноимпульсной радиосистемы с ответчиком радиозонда, построенным на основе СПП.
Структурная схема РЛС, реализующая моноимпульсный метод измерения угловых координат на основе импульсно-фазового метода обнаружения и обработки ответного сигнала СПП по дальности, изображена на фиг.1. На фиг.2-6 - графики, поясняющие работу системы.
На фиг.2 изображено: а) спектр радиоимпульсов G (f), излучаемых СПП АРЗ; б) амплитудно-частотная характеристика Y (f) СПП.
На фиг.3 изображено: 1) огибающая спектра излучения СПП, 2) дискретные спектральные составляющие излучения СПП.
На фиг.3 изображено: а) спектр синхронизированных радиоимпульсов, излучаемых СПП; б) спектр квазинепрерывного запросного сигнала на входе СПП, 1) огибающая спектра излучения СПП, 2) дискретные спектральные составляющие излучения СПП.
На фиг.4 изображено: а) огибающая запросного сигнала радиоимпульса РЛС, б) вид ответного сигнала СПП на выходе фазового детектора РЛС.
На фиг.5 изображено: а) вид ответного сигнала СПП на входе системы дальности; б) вид сигнала пеленга на выходе углового дискриминатора РЛС.
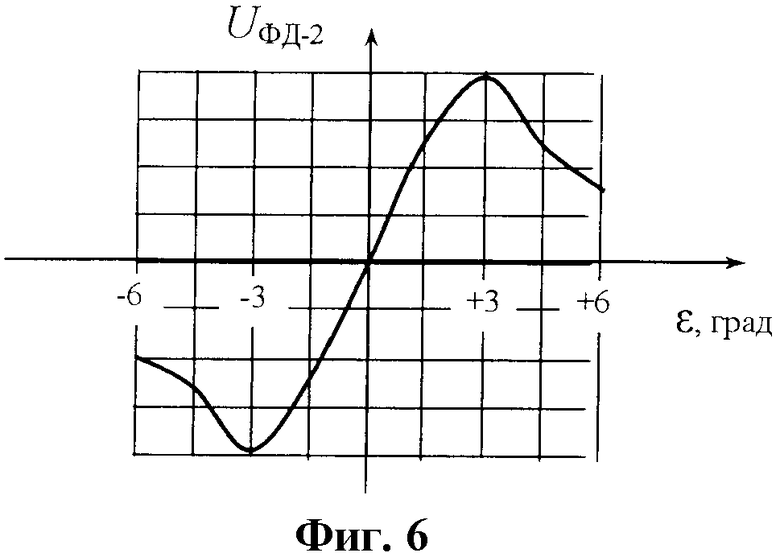
На фиг.6 изображена пеленгационная характеристика моноимпульсной РЛС.
Необходимо отметить следующие особенности функционирования радиосистемы.
Принципиальное отличие от классического аналога заключается в том, что несущая частота fспп вследствие нестабильности СВЧ-автогенератора СПП может существенно отличаться от частоты запросного (зондирующего) сигнала fзс в сравнении с допплеровским сдвигом частоты.
Обнаружение и сопровождение ответных когерентных радиоимпульсов СПП по дальности происходит в потоке некогерентных радиоимпульсов таких же по уровню мощности.
Излучение СПП промодулировано низкочастотными сигналами блока телеметрии радиозонда, например, путем частотно-импульсной манипуляции поднесущей (суперирующей) частоты приемопередатчика.
Непосредственное использование излучения СПП для формирования сигнала ошибки в моноимпульсной системе измерения угловых координат затруднено из-за значительного уровня амплитудного и фазового шумов в спектре СПП. Предложенный вариант построения канала дальности на основе приема ответных когерентных радиоимпульсов СПП [1, 2] позволяет принципиально использовать их для формирования сигнала отклонения антенны РЛС от равносигнального направления с помощью, например, фазового суммарно-разностного углового дискриминатора [5].
Радиочастотный спектр излучения СПП является сплошным, шумоподобным и широкополосным по отношению к передаваемой телеметрической информации на наземную РЛС (см. фиг.2) [1]. На фиг.2 также показана АЧХ СПП, которая характеризует его приемные свойства. Значение несущей частоты fспп соответствует максимуму спектра излучения радиоимпульсов СПП. Частота оптимального приема
fпр соответствует центру АЧХ. При правильной настройке СПП частота приема практически совпадает с частотой излучения fпр≅fспп. Значения частот fспп, fпр и характеристики спектра приведены для СПП серийных радиозондов типа МРЗ-3. Ширина спектра по первому лепестку зависит от длительности радиоимпульсов СПП, которая находится в пределах τи=0.25-0.35 мкс. Относительная нестабильность частот fспп и fпр определяется нестабильностью частоты СВЧ-автогенератора СПП и практически составляет величину порядка ±10-3 [2].
При отсутствии запросного сигнала последовательность радиоимпульсов СПП на промежуточной частоте Uпч приемного устройства РЛС, поступающая на вход ФД-1, имеет шумоподобный спектр, подобный изображенному на фиг.1. Фазы радиоимпульсов СПП некоррелированы и распределены равномерно, поэтому выходной сигнал ФД-1 в этом случае представляет собой непрерывный шумовой поток разнополярных видеоимпульсов (см. фиг4,б), равномерно распределенных по амплитуде во всем диапазоне от -Umax до +Umax. Следует отметить, что обычно значение суперирующей частоты СПП Fc в десятки раз превышает частоту повторения запросных радиоимпульсов Fп. Кроме того, моменты прихода запросных радиоимпульсов РЛС на вход СПП и запуска радиоимпульсов СПП случайны. Поэтому на фиг.4,б осциллограмма выходных видеоимпульсов ФД, синхронизированная с моментом запуска передатчика запросного сигнала и приходом ответного сигнала и не синхронизированная с моментом запуска радиоимпульсов СПП, воспринимается в виде огибающей с непрерывным заполнением (затемненная часть фиг.4,б).
При появлении на входе приемного устройства синхронизированных по фазе когерентных радиоимпульсов (ответного сигнала) СПП (см. фиг.3,а) при постоянном значении наклонной дальности Rн, выходной сигнал ФД-1 устанавливается на некотором определенном уровне Uос в течение действия (длительности τзс) запросного радиоимпульса (см. фиг.4,б), пропорциональном разности фаз опорного сигнала и принятых радиоимпульсов. Необходимо подчеркнуть, что ширина линии уровня ответного сигнала Uσ определяется среднеквадратичным значением плотности распределения фазы σφ во время действия запросного сигнала, другими словами - уровнем мощности запросного сигнала Рзс. На фиг.4 условно принято, что время задержки запросного и ответного сигналов при их распространении до радиозонда и обратно равно нулю (Rн=0).
При изменении наклонной дальности вследствие эффекта Допплера будет происходить смещение частот спектральных линий fспп i синхронизированных радиоимпульсов СПП относительно частоты опорного сигнала foc на величину частоты Допплера FД. Сигнал на выходе ФД-1 будет изменяться с частотой биений FД между опорным сигналом fос и первой совпадающей гармоникой fспп 0 синхронизированных радиоимпульсов. Частота биений с другими гармониками спектра СПП fспп i увеличивается пропорционально Fc и номеру этих гармоник относительно fоп и fcпп 0. Поэтому при изменении наклонной дальности RH уровень ответного сигнала Uос будет смещаться параллельно оси абсцисс с частотой Допплера FД от максимума отрицательного до максимума положительного уровня видеоимпульсов. Для улучшения условий наблюдения и снижения влияния фазового шума не синхронизированных радиоимпульсов СПП, ответный сигнал далее выделяется с помощью стробов, вырабатываемых в блоке измерения наклонной дальности системой автоматического сопровождения ответного сигнала. Длительность стробов выбирается равной длительности ответного сигнала СПП. Таким образом, работа следящей системы блока измерения наклонной дальности сводится к смещению строба в пределах периода повторения запросных радиоимпульсов ТП, выделяющего из всего излучения радиозонда ответный сигнал. По времени распространения tp определяется наклонная дальность до радиозонда (фиг.5).
При отсутствии ответного сигнала спектр в течение стробирующего импульса имеет флуктуационный характер. Признаком появления ответного сигнала является изменение спектра сигнала U* ФД в интервале стробирования. Другими словами, при появлении ответного сигнала в стробе он приобретает регулярный характер, связанный с наличием допплеровской частоты.
Необходимо указать некоторые принципиальные методы обнаружения ответного сигнала.
Ответный сигнал после стробирования можно выделить с помощью цепочки узкополосных параллельных фильтров, резонансные частоты которых выбраны в пределах изменения FД.
Как уже отмечалось, обнаружение ответного сигнала может быть осуществлено с помощью анализатора спектра. Максимум амплитуды спектральных составляющих на выходе анализатора спектра или отношения сигнал/шум на выходе фильтров является признаком точного совмещения по времени стробирующих импульсов с ответным сигналом. Далее в блоке осуществляется непосредственное измерение допплеровской частоты FД смещения уровня ответного сигнала Uос и вычисление мгновенной скорости перемещения радиозонда VR.
Возможны другие более сложные методы обнаружения и автосопровождения ответного сигнала СПП, основанные на методах цифровой обработки.
Таким образом, применение импульсно-фазового метода формирования и приема ответного сигнала по дальности СПП дает следующие результаты:
Фазовая чувствительность СПП на 10-15 дБ превосходит его чувствительность в классическом режиме вторичной реакции и составляет минус 110-115 дБ/Вт. Устойчивость и стабильность работы СПП в режиме фазовой синхронизации значительно выше, чем в режиме работы с вторичной реакцией. При этом снижается уровень амплитудных шумов СПП, длительность радиоимпульсов может быть практически увеличена до оптимального значения, равного примерно половине длительности периода суперирующего напряжения, что позволяет уменьшить ширину спектра в 1.5-2.0 раза, Все эти меры повышают потенциал радиоканала дополнительно на 1.5-3.0 дБ.
Импульсно-фазовый метод позволяет измерять с высокой точностью мгновенную скорость ветра, используя эффект Допплера. Это дает возможность контролировать тонкую структуру возмущений в атмосфере - ее турбулентность.
На основе импульсно-фазового метода измерения дальности, учитывая когерентность ответных радиоимпульсов, возможно построение радиосистемы с моноимпульсным измерением угловых координат, что позволяет дополнительно повысить точность измерения угловых координат и потенциал радиоканала СР [3, 4,
5].
На фиг.1 приведена структурная схема варианта моноимпульсной РЛС (одного углового канала), реализованной на основе фазового суммарно-разностного углового дискриминатора и канала измерения дальности на основе когерентного импульсно-фазового метода, на которой изображено: 1 - антенный переключатель, 2 - когерентный передатчик (импульсный усилитель мощности), 3 - синхронизатор, 4 - цифровое измерительное устройство (блок измеритель дальности), 5 - антенный блок, 6 - антенно-волновой тракт (АВТ), 7, 14 - первый и второй смесители, 8, 15 - первый и второй усилители промежуточной частоты (УПЧ), 9, 12 - первый и второй фазовые детекторы (ФД), 10 - первый, второй и третий синтезаторы частот (СЧ), 11 - блок автоматической регулировки усиления (АРУ), 13 - фильтр низкой частоты (ФНЧ), 16 - блок сдвига π/2.
Схема имеет следующие соединения: антенный блок 5 через АВТ 6 своим выходом соединен с сигнальным входом второго смесителя 15, а входом/выходом UΣ с АП1, который своим выходом U соединен с сигнальным входом первого смесителя 7, выход последнего через первый УПЧ 8 соединен с сигнальным входом первого фазового детектора 9, выход которого UФД соединен с входом блока измерителя дальности 4, с синхровходом которого соединен выход синхронизатора 3, выход которого также соединен с входом когерентного передатчика 2, а выход измерителя дальности 4 является выходом системы: выход второго смесителя 15 через блок сдвига 16 соединен с опорным входом второго фазового детектора 12, с сигнальным входом которого соединен выход первого УПЧ 8, а с разрешающим входом второго фазового детектора 12 соединен выход измерителя дальности 4, выход второго фазового детектора 12 через ФНЧ 13 является выходом системы по Δε; выходы синтезатора частот 10 соединены: шиной первой частоты f1 - с первым 7 и вторым 14 смесителями, шиной второй частоты f2 - с когерентным передатчиком 2, шиной третьей частоты f3 - с опорным входом первого фазового детектора 9, второй выход первого УПЧ 8 соединен с АРУ 11, выход которой соединен с регулирующими входами первого 8 и второго 15 УПЧ.
Измерение угловых координат осуществляется путем сравнения фаз колебаний, принятых антеннами, построенными, например, на основе фазированных антенных решеток (ФАР) А1 и А2, фазовые центры которых разнесены на величину базы d. Суммарный UΣ и разностный UΔ сигналы формируются в суммарно-разностном тракте (СРТ).
Далее они поступают на входы приемных устройств суммарного и разностного каналов. В упрощенном виде уравнение, описывающее отклонение антенны по углу от точного направления на цель, имеет вид [5]

где Zc,  - сигналы на выходах УПЧ суммарного (УПЧ-1) и разностного (УПЧ-2) каналов. Множитель j учитывается введением в схему обработки фазовращателя (π/2).
- сигналы на выходах УПЧ суммарного (УПЧ-1) и разностного (УПЧ-2) каналов. Множитель j учитывается введением в схему обработки фазовращателя (π/2).
Вычисление реальной части произведения комплексно-сопряженных амплитуд Zc,  осуществляется в фазовом детекторе (ФД-2). Операция деления обеспечивается введением автоматической регулировки усиления (АРУ) по суммарному каналу (УПЧ-1) и использованием ее для регулировки усиления в канале разностного сигнала (УПЧ-2).
осуществляется в фазовом детекторе (ФД-2). Операция деления обеспечивается введением автоматической регулировки усиления (АРУ) по суммарному каналу (УПЧ-1) и использованием ее для регулировки усиления в канале разностного сигнала (УПЧ-2).
Ответный сигнал СПП формируется на выходе ФД-1 и поступает на вход следящей системы измерения дальности, которая вырабатывает стробирующие импульсы, совпадающие по времени с ответным сигналом СПП. Стробирующие импульсы обеспечивают поступление на первый вход детектора сигнала ошибки угла ФД-2 ответных когерентных радиоимпульсов СПП. На второй вход поступает разностный сигнал с выхода фазовращателя (π/2). Сигнал на выходе ФД соответствует амплитуде видеоимпульсов UФД [2]. Стробы, поступающие с выхода системы измерения дальности на ФД-2, обеспечивают выделение из общего шумового потока видеоимпульсов, амплитуда которых пропорциональна величине отклонения антенны от пеленга и полярность, определяющую направление отклонения от пеленга. Амплитуда разнополярных видеоимпульсов UФД-2(t) на выходе ФД-2 пропорциональна величине угловой ошибки Δε, а знак определяет направление рассогласования пеленга (см. фиг.5).
Далее видеоимпульсы поступают на вход системы управления приводами антенны и обеспечивают ее наведение на направление точного пеленга цели.
Ширина диаграммы направленности микрополосковой антенны при экспериментальных измерениях пеленгационной характеристики составляла θ=6.2 град. Измерение пеленгационной характеристики РЛС, работающей в моноимпульсном режиме, проводилось путем измерения амплитуды видеоимпульсов на выходе ФД-2 для различных углов направления антенны на радиозонд. Результаты измерений пеленгационной характеристики приведены на фиг.6. Они подтверждают совпадение с ожидаемыми параметрами классической моноимпульсной радиосистемы [3, 4].
Литература
1. Радиозондирование атмосферы. Иванов В.Э., Фридзон М.Б., Ессяк С.П. Екатеринбург. УрО РАН, 2004, 596 с., ISBN 5-7691-1513-0.
2. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. М.: «Сов. радио», 1970.
3. Справочник по радиолокации. / Под ред М.Сколника. Нью-Йорк, 1970. Пер. с англ. (в 4 томах) под общей ред. К.Н.Трофимова. Т 4. Радиолокационные станции и системы / Под ред. М.М.Вейсбейна. М.: Сов. радио, 1978, 376 с.
4. Бартон Д., Вард Г. Справочник по радиолокационным измерениям. М.: Сов. радио, 1976, 356 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА | 2004 |
|
RU2304290C2 |
| МНОГОРЕЖИМНЫЙ АЭРОЛОГИЧЕСКИЙ КОМПЛЕКС | 2019 |
|
RU2710965C1 |
| РАДИОЛОКАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2793597C1 |
| СПОСОБ РЕГУЛИРОВКИ ВЫХОДНЫХ ПАРАМЕТРОВ СВЕРХРЕГЕНЕРАТИВНОГО ПРИЕМОПЕРЕДАТЧИКА РАДИОЗОНДА | 2011 |
|
RU2470323C1 |
| СПОСОБ ДОПЛЕРОВСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2808775C1 |
| НАВИГАЦИОННО-РАДИОЛОКАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2805163C1 |
| СПОСОБ ПЕРЕДАЧИ КОМАНД УПРАВЛЕНИЯ НА БОРТ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2804516C1 |
| СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ С ПАКЕТНОЙ ПЕРЕДАЧЕЙ МЕТЕОРОЛОГИЧЕСКОЙ ИНФОРМАЦИИ | 2013 |
|
RU2529177C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА | 2023 |
|
RU2801741C1 |
| СПОСОБ СТАБИЛИЗАЦИИ УРОВНЯ СИГНАЛА НА ВХОДЕ АВТОДИННОГО АСИНХРОННОГО ПРИЕМОПЕРЕДАТЧИКА СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2023 |
|
RU2808230C1 |





Изобретение относится к радиотехнике, а именно к радиолокации, и может быть использовано для определения наклонной дальности радиотехническими методами, например, до аэрологических радиозондов (АРЗ), также может быть использовано для измерения угловых координат АРЗ и сопровождения АРЗ по дальности. Достигаемым техническим результатом изобретения является повышение точности измерения угловых координат радиозонда, снижение мощности передатчика запросного сигнала, повышение помехоустойчивости комплекса и повышение скрытности работы наземной радиолокационной станции (РЛС). Указанный результат достигается за счет того, что моноимпульсная РЛС построена на принципах когерентно-импульсной обработки ответного сигнала сверхрегенеративных приемо-передатчиков-ответчиков, оптимальной цифровой обработки сигналов и цифровых методов управления. Это позволяет в 1,5-2 раза повысить точность измерения угловых координат радиозонда. 6 ил.
Моноимпульсная система, содержащая две разнесенные фазированные антенные решетки, выходы которых подключены через антенно-волноводный тракт (АВТ) его суммарным выходом к антенному переключателю, а разностным - к смесителю амплитудного подканала, включающему также усилитель промежуточной частоты (УПЧ) и фазовый детектор, выход антенного переключателя соединен со смесителем фазового подканала, включающего также последовательно соединенные УПЧ и фазовый детектор, выход синтезатора частот с одной частотой подключен к входам смесителей обоих подканалов, выход каждого смесителя подключен к УПЧ соответствующего подканала, второй вход фазового детектора фазового подканала соединен с выходом синтезатора частот с другой частотой, выход когерентного передатчика соединен с входом антенного переключателя, отличающийся тем, что выход УПЧ фазового подканала соединен с автоматическим регулятором уровня (АРУ), выходы которого соединены с регулирующими входами соответственно УПЧ амплитудного и фазового подканалов, выход УПЧ амплитудного подканала через фазовращатель на π/2 соединен с фазовым детектором амплитудного подканала, второй вход которого соединен с выходом УПЧ фазового подканала, а разрешающий вход фазового детектора амплитудного подканала соединен с выходом измерителя дальности, выход фазового детектора амплитудного подканала соединен с фильтром низких частот (ФНЧ), выход которого является одним из выходов системы, выход фазового детектора фазового подканала соединен с измерителем дальности, второй вход которого соединен с синхронизатором, а выход является другим выходом системы, синхронизатор также связан с входом когерентного передатчика, другой вход которого связан с выходом синтезатора частот с третьей частотой.
| Информационные технологии в радиотехнических системах | |||
| Под ред | |||
| ФЕДОРОВА И.Б | |||
| - М.: изд | |||
| МВТУ им | |||
| Н.Э.Баумана, 2003, 672 с | |||
| RU 2004128517 А, 10.03.2006 | |||
| ЗЕМЛЕСОСНАЯ МАШИНА | 1937 |
|
SU53453A1 |
| RU 13704 U1, 10.05.2000 | |||
| ДВУХКОЛЕСНАЯ ТЕЛЕЖКА ДЛЯ ТРАНСПОРТИРОВАНИЯ ГРУЗОВ В ТАРЕ | 1935 |
|
SU52491A1 |
| US 6087974 A, 11.07.2000 | |||
| US 5440483 A, 08.08.1995 | |||
| WO 9504943 A1, 16.02.1995. | |||

