Изобретение относится к железнодорожному транспорту и может быть использовано для дистанционного управления процессами, происходящими в тормозной системе поезда (торможение, отпуск, перекрыша и поддержание зарядного давления в тормозной магистрали) с локомотивной тягой как в составе системы автоведения без участия машиниста, так и от отдельных органов дистанционного управления.
Система для ручного управления тормозами поезда с локомотивной тягой, принятая в качестве прототипа, содержит кран машиниста, соединенный с тормозной и питательной магистралями, уравнительный резервуар, сообщенный через магистраль с краном машиниста, который через соответствующие каналы соединен с редуктором и стабилизатором (см. Иноземцев В.Г., Абашкин И.В. “Тормозное и пневматическое оборудование подвижного состава”, М.: Транспорт, 1984, с. 61-71).
Известное устройство позволяет машинисту в ручном режиме управлять процессами, происходящими в тормозной системе поезда (торможение, отпуск, перекрыша и поддержанием зарядного давления в тормозной магистрали) с локомотивной тягой.
К недостаткам известного устройства следует отнести невозможность осуществления дистанционного управления процессами, происходящими в тормозной системе поезда (торможение, отпуск, перекрыша и поддержание зарядного давления в тормозной магистрали) с локомотивной тягой как в составе системы автоведения без участия машиниста, так и от отдельных органов дистанционного управления, а также механический износ золотника крана машиниста.
Технический результат заключается в обеспечении возможности дистанционного управления процессами, происходящими в тормозной системе поезда (торможение, отпуск, перекрыша и поддержанием зарядного давления в тормозной магистрали) с локомотивной тягой как в составе системы автоведения без участия машиниста, так и от отдельных органов дистанционного управления, и повышении надежности за счет снижения механического износа золотника крана машиниста.
Технический результат достигается тем, что в систему для управления тормозами поезда с локомотивной тягой, содержащую кран машиниста, соединенный с тормозной магистралью и сообщенный через измерительный и первый питательный каналы с редуктором, питательную магистраль, уравнительный резервуар, сообщенный через магистраль с краном машиниста и стабилизатор, введены четыре электромагнитных клапана, три разобщительных крана, два электропневматических вентиля, при этом питательная магистраль подключена к крану машиниста через первый электромагнитный клапан, в канал, сообщающий кран машиниста со стабилизатором, установлен второй электромагнитный клапан, магистраль, сообщающая кран машиниста с уравнительным резервуаром через первый разобщительный кран и первый электропневматический вентиль, соединена с атмосферным каналом, во второй питательный канал, соединяющий кран машиниста с редуктором, установлен второй электропневматический вентиль, питательная магистраль через второй разобщительный кран и третий электромагнитный клапан соединена с первым питательным каналом, сообщающим редуктор с краном машиниста, между питательной магистралью и тормозной магистралью включены четвертый электромагнитный клапан и третий разобщительный кран, цепи управления электромагнитными клапанами и электропневматическими вентилями соединены с контроллером машиниста. Кроме того, дополнительно в систему для управления тормозами поезда с локомотивной тягой на уравнительный резервуар устанавливается датчик давления, выход которого предназначен для подключения к блоку дистанционного управления системы автоведения поезда.
Система для управления тормозами поезда с локомотивной тягой используется как самостоятельный орган управления от электрического контроллера, так и для управления от системы автоведения без участия машиниста. При управлении тормозами от системы автоведения дополнительно на уравнительный резервуар устанавливается датчик давления.
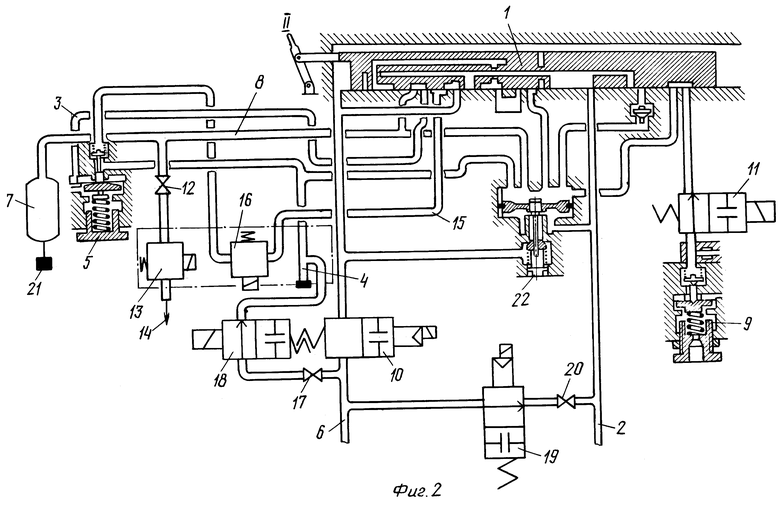
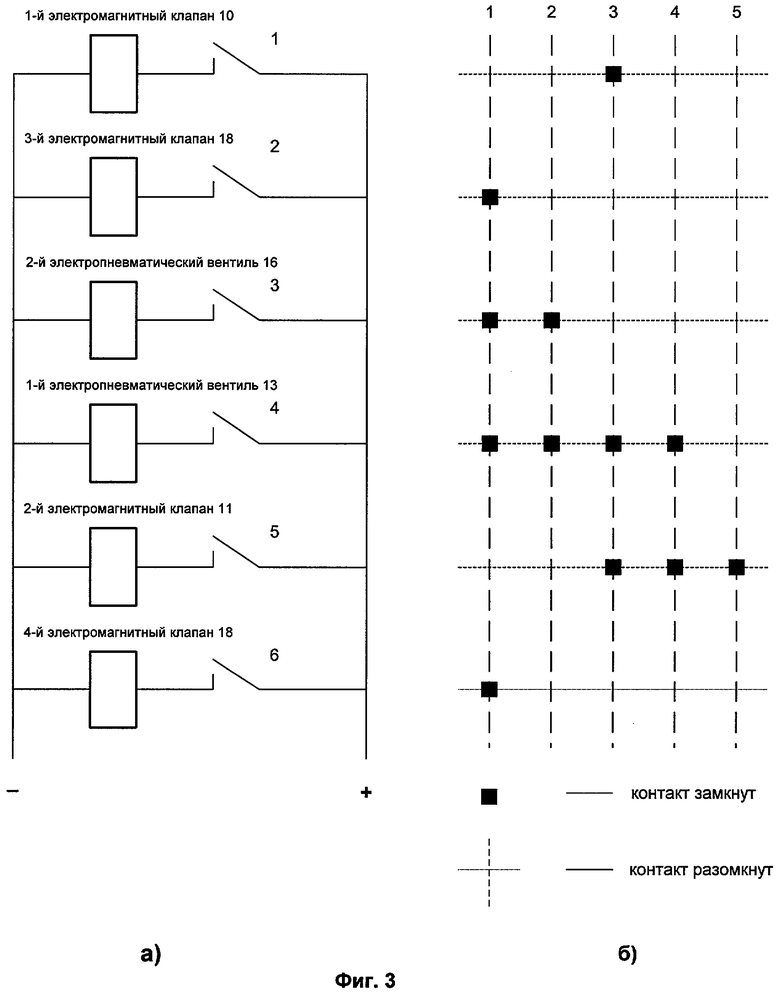
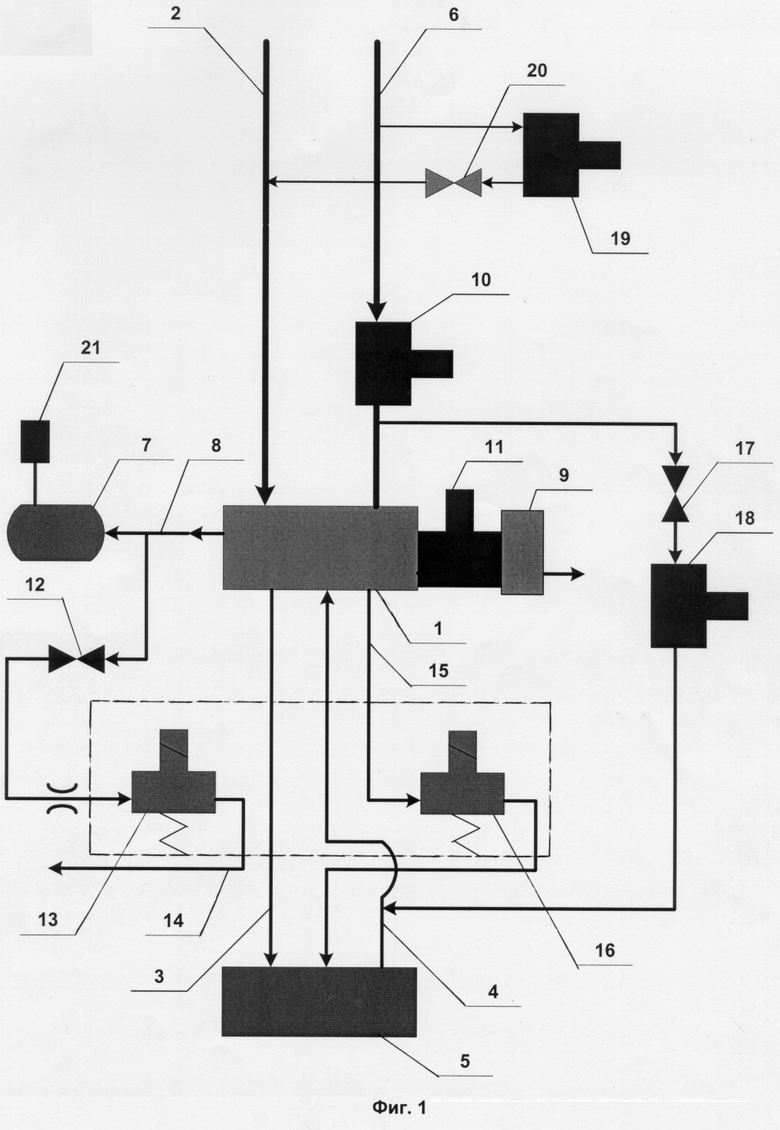
На фиг.1 представлена функциональная схема системы для управления тормозами поезда с локомотивной тягой. На фиг.2 представлена пневмосхема системы для управления тормозами поезда с локомотивной тягой. На фиг.3,а приведена электрическая схема управления электромагнитными клапанами и электропневматическими вентилями посредством контроллера машиниста. Цифрами 1-6 обозначены контакты контроллера, через которые подается управляющее напряжение +50 В на цепи управления соответствующих электромагнитных клапанов и электропневматических вентилей. На фиг.3,б приведена таблица соответствия положений переключателя контроллера положениям ручки крана машиниста при ручном управлении.
Система для управления тормозами поезда с локомотивной тягой содержит (см. фиг.1 и 2) кран 1 машиниста, соединенный с тормозной магистралью 2 и сообщенный через измерительный канал 3 и первый питательный канал 4 с редуктором 5, питательную магистралью 6, уравнительный резервуар 7, сообщенный через магистраль 8 с краном 1 машиниста и стабилизатором 9, при этом питательная магистраль 6 подключена к крану 1 машиниста через первый электромагнитный клапан 10, в канал, сообщающий кран 1 машиниста со стабилизатором 9, установлен второй электромагнитный клапан 11, магистраль 8, сообщающая кран 1 машиниста с уравнительным резервуаром 7 через первый разобщительный кран 12 и первый электропневматический вентиль 13, соединена с атмосферным каналом 14, во второй питательный канал 15, соединяющий кран 1 машиниста с редуктором 5, установлен второй электропневматический вентиль 16, питательная магистраль 6 через второй разобщительный кран 17 и третий электромагнитный клапан 18 соединена с первым питательным каналом 4, сообщающим редуктор 5 с краном 1 машиниста, между питательной магистралью 6 и тормозной магистралью 2 включены четвертый электромагнитный клапан 19 и третий разобщительный кран 20, цепи управления электромагнитными клапанами и электропневматическими вентилями соединены с контроллером машиниста. Дополнительно на уравнительный резервуар устанавливается датчик давления 21, выход которого предназначен для подключения к блоку дистанционного управления системы автоведения поезда.
Кран 1 машиниста может быть выполнен на базе крана машиниста №394М или №395М. Электропневматические вентили 13 и 16, соответственно, выполнены на базе вентилей электропневматических 120 (включающих) и могут быть помещены в один блок. Такой блок носит название - приставка к крану машиниста. Приставка к крану машиниста может быть выполнена на базе приставки электропневматической 206. Первый, второй, третий и четвертый электромагнитные клапаны 10, 11, 18 и 19, соответственно, выполнены на базе электромагнитных клапанов типа КЭО 50/12/2-50/2, КЭО 0,8/10/2-50/2, КЭО 3/10/2-50/11 и КЭО 15/20/2-50/5, соответственно. Первый, второй и третий разобщительные краны 12, 17 и 20, соответственно, могут быть выполнены на базе кранов разобщительных 4200. Атмосферный канал 14 имеет калиброванное отверстие. Калиброванное отверстие может быть выполнено в виде ниппеля диаметром 2,4 мм.
Данная система для управления тормозами поезда с локомотивной тягой обеспечивает характеристики воздушных процессов в соответствии с требованиями, установленными техническими условиями ТУ 24.05.907-89 “Краны машиниста 394М и 395М”. Клапаны электромагнитные отвечают требованиям, установленным техническими условиями ТУ 3742-001-24039780-00, приставка 206 отвечает требованиям, установленным техническими условиями ТУ 3184-001-05756760-98.
Система для управления тормозами поезда с локомотивной тягой работает следующим образом (см. фиг.1 и 2).
В исходном состоянии первый электромагнитный клапан 10 является нормально открытым, второй электромагнитный клапан 11 - нормально открытым, первый электропневматический вентиль 13 - нормально открытым, второй электропневматический вентиль 16 - нормально закрытым, третий электромагнитный клапан 18 - нормально закрытым, четвертый электромагнитный клапан 19 - нормально закрытым.
Кран 1 машиниста находится во 2-м положении ручки крана 1 машиниста, при этом обеспечиваются следующие режимы управления автоматическими тормозами:
- режим “поддержание зарядного давления”. При подаче напряжения на первый и второй электропневматические вентили 13 и 16, соответственно, в первом электропневматическом вентиле 13 перекрывается атмосферный канал 14, а во втором электропневматическом вентиле 16 открывается первый питательный канал 4. По этому каналу воздух от питательной магистрали 6 проходит в редуктор 5 крана 1 машиниста, т.к. рукоятка крана 1 машиниста находится во 2-м положении. Поддержание давления в уравнительном резервуаре 7 и тормозной магистрали 2 происходит по штатной схеме работы крана 1 машиниста №394 (см. Иноземцев В.Г., Абашкин И.В. “Тормозное и пневматическое оборудование подвижного состава”. М.: Транспорт, с. 61-71);
- режим “торможение”. Первый и второй электропневматические вентили 13 и 16, соответственно, обесточиваются. Питательный клапан второго электропневматического вентиля 16 перекрывает сообщение крана 1 машиниста с редуктором 5. Первый электропневматический вентиль 13 сообщает уравнительный резервуар 7 и полость над уравнительным поршнем 22 крана 1 машиниста с атмосферой, обеспечивая разрядку уравнительного резервуара 7 темпом служебного торможения. Время снятия напряжения с первого электропневматического вентиля 13 определяет величину разрядки и контролируется по показанию манометра уравнительного резервуара 7, а в системе автоведения - по сигналу датчика 21 давления;
- режим “перекрыша”. При достижении требуемой величины разрядки уравнительного резервуара 7 на первый электропневматический вентиль 13 подается напряжение. Происходит разобщение уравнительного резервуара 7 и полости над уравнительным поршнем 22 крана 1 машиниста с атмосферой. Поскольку второй электропневматический вентиль 16 обесточен, уравнительный резервуар 7 и полость над уравнительным поршнем 22 крана 1 машиниста разобщены с питательной магистралью 6. В уравнительном резервуаре 7 сохраняется давление установившееся на момент закрытия атмосферного клапана первого электропневматического вентиля 13. Дополнительно, в зависимости от того, на какой электромагнитный клапан, первый электромагнитный клапан 10 или второй электромагнитный клапан 11, подается напряжение, обеспечивается и соответствующий режим “перекрыши” - с питанием тормозной магистрали 2 или без питания тормозной магистрали 2, соответственно;
- режим “отпуска”. Осуществляются два режима отпуска. Это отпуск короткосоставных поездов (поезд с составом до 11 вагонов включительно) и поездов нормальной и повышенной длины.
Для отпуска тормозов в короткосоставных поездах подается питание на первый и второй электропневматические вентили 13 и 16, соответственно, и третий электромагнитный клапан 18. При подаче напряжения на первый и второй электропневматические вентили 13 и 16, соответственно, протекают процессы, описанные в разделе “поддержание зарядного давления”. Через третий электромагнитный клапан 18 из питательной магистрали 6 поступает воздух, давлением питательной магистрали 6, в полость над уравнительным поршнем 22, открывая питательный клапан на хвостовике уравнительного поршня 22 крана 1 машиниста на максимальную величину. Время подачи питания на третий электромагнитный клапан 18 контролируется по показанию манометра на уравнительном резервуаре 7, а в системе автоведения - по сигналу датчика 21 давления. При восстановлении зарядного давления в уравнительном резервуаре 7 снимается питание с третьего электромагнитного клапана 18.
Отпуск тормозов в поездах нормальной и повышенной длины обеспечивается дополнительным включением четвертого электромагнитного клапана 19. Четвертый электромагнитный клапан 19 включается совместно с третьим электромагнитным клапаном 18. Проходное сечение четвертого электромагнитного клапана 19 соответствует сечению крана 1 машиниста между питательной магистралью 6 и тормозной магистралью 2 при 1-м положении ручки крана 1 машиниста. Этим обеспечивается суммарное проходное сечение воздушных каналов, как при 1-м положении ручки крана 1 машиниста, хотя ручка крана 1 машиниста находится во 2-м положении;
- режим “экстренное торможение” оставлен на кране 1 машиниста, т.к. это аварийный режим, и решение о его применение принимается лично машинистом. При необходимости он реализуется дополнительной установкой еще одного электромагнитного клапана типа КЭО на тормозной магистрали 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЛОК АДАПТИВНОГО УПРАВЛЕНИЯ ТОРМОЗОМ ТЕЛЕЖКИ | 2012 |
|
RU2524751C1 |
| УСТРОЙСТВО ДЛЯ КРАНА МАШИНИСТА (ВАРИАНТЫ) | 2014 |
|
RU2593176C2 |
| КРАН МАШИНИСТА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2329167C1 |
| КРАН МАШИНИСТА ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2444454C1 |
| Кран машиниста с дистанционным управлением автоматическим пневматическим тормозом | 2023 |
|
RU2814304C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДА | 2011 |
|
RU2478053C2 |
| Кран машиниста железнодорожного транспортного средства | 1986 |
|
SU1382700A1 |
| Кран машиниста железнодорожного транспортного средства | 2016 |
|
RU2635732C1 |
| Кран машиниста тормоза железнодорожного транспортного средства | 1982 |
|
SU1110689A1 |
| КОМПЛЕКС ТОРМОЗНОГО ОБОРУДОВАНИЯ ЛОКОМОТИВА | 2007 |
|
RU2352482C1 |
Изобретение относится к железнодорожному транспорту и может быть использовано для дистанционного управления процессами, происходящими в тормозной системе поезда (торможение, отпуск, перекрыша и поддержание зарядного давления в тормозной магистрали) с локомотивной тягой как в составе системы автоведения без участия машиниста, так и от отдельных органов дистанционного управления. Система для управления тормозами поезда с локомотивной тягой содержит кран машиниста, соединенный с тормозной магистралью и сообщенный через измерительный и первый питательный каналы с редуктором, питательную магистраль, уравнительный резервуар, сообщенный через магистраль с краном машиниста, и стабилизатор. Питательная магистраль подключена к крану машиниста через первый электромагнитный клапан. В канал, сообщающий кран машиниста со стабилизатором, установлен второй электромагнитный клапан. Магистраль, сообщающая кран машиниста с уравнительным резервуаром, через первый разобщительный кран и первый электропневматический вентиль соединена с атмосферным каналом. Во второй питательный канал, соединяющий кран машиниста с редуктором, установлен второй электропневматический вентиль. Питательная магистраль через второй разобщительный кран и третий электромагнитный клапан соединена с первым питательным каналом, сообщающим редуктор с краном машиниста. Между питательной магистралью и тормозной магистралью включены четвертый электромагнитный клапан и третий разобщительный кран. Цепи управления электромагнитными клапанами и электропневматическими вентилями соединены с контроллером машиниста. Дополнительно на уравнительный резервуар устанавливается датчик давления, выход которого предназначен для подключения к блоку дистанционного управления системы автоведения поезда. Технический результат заключается в обеспечении возможности дистанционного управления процессами, происходящими в тормозной системе поезда (торможение, отпуск, перекрыша и поддержанием зарядного давления в тормозной магистрали) с локомотивной тягой как в составе системы автоведения без участия машиниста, так и от отдельных органов дистанционного управления, и повышении надежности за счет снижения механического износа золотника крана машиниста. 1 з.п. ф-лы, 4 ил.
| ИНОЗЕМЦЕВ В.Г., АБАШКИН И.В | |||
| ТОРМОЗНОЕ И ПНЕВМАТИЧЕСКОЕ ОБОРУДОВАНИЕ ПОДВИЖНОГО СОСТАВА | |||
| - М.: ТРАНСПОРТ, 1984, с | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| ТОРМОЗНАЯ СИСТЕМА ЛОКОМОТИВА | 1998 |
|
RU2198810C2 |
| ГОРЕЛКА ДЛЯ КУХНИ ТИПА "ПРИМУС" | 1933 |
|
SU38079A1 |
| Станок для выпрямления гвоздей | 1932 |
|
SU33379A1 |
| DE 3209247, 06.10.1983 | |||
| СПОСОБ ПОЛУЧЕНИЯ ХУДОЖЕСТВЕННОГО ИЗОБРАЖЕНИЯ | 1992 |
|
RU2108921C1 |
| GB 2060102 A, 29.04.1981 | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |

