Предлагаемое техническое решение относится к железнодорожному транспорту и может быть использовано для дистанционного управления тормозными процессами поезда с локомотивной тягой.
Известны различные технические решения, направленные на решение этой задачи.
Например, известен кран машиниста для управления пневматическими и электропневматическими тормозами, который содержит корпус с крышкой и рукоятью, взаимодействующей с золотником, размещенным в крышке, при этом на корпусе смонтированы сообщенные с ним пневматическими каналами редуктор и стабилизатор, а также штуцеры для подсоединения трубопроводов тормозной и питательной магистралей, уравнительного резервуара, (см. кн. «Тормоза подвижного состава» авт.Крылов В.И., Клыков Е.В., Ясенцев В.Ф., М., «Транспорт», 1980 г, стр. 68-77).
В указанном техническом решении управление тормозными процессами поезда (торможение, отпуск, перекрыша и поддержание зарядного давления в тормозной магистрали) машинист осуществляет в ручном режиме. К недостаткам данного крана машиниста можно отнести то, что у него отсутствует функция дистанционного управления процессами, происходящими в тормозной системе поезда с локомотивной тягой.
В качестве прототипа выбран «Кран машиниста с дистанционным управлением» (Патент РФ на полезную модель №204331, В60Т 15/36, опубликована 20.05.2021 г. в бюл. 14).
Этот кран машиниста с дистанционным управлением автоматическим пневматическим тормозом содержит корпус с крышкой и рукоятью, взаимодействующей с размещенным в крышке золотником, установленные в корпусе уравнительный поршень и выпускной клапан, контроллер. При этом на корпусе крана машиниста закреплены редуктор и стабилизатор, штуцеры для питательной и тормозной магистралей соответственно, штуцер для уравнительного резервуара, а также приставки, смонтированные на корпусах крана машиниста, редуктора и стабилизатора.
Рукоять крана машиниста имеет семь фиксированных положений: I положение - зарядка и отпуск (сверхзарядка), II положение - поездное, III положение - перекрыша без питания ТМ, IV положение - перекрыша с питанием ТМ, Va - замедленное торможение, V положение - служебное торможение, VI положение - экстренное торможение.
Основная приставка состоит из корпуса с фланцем, на котором смонтированы электропневматические вентили сверхзарядного давления, отпуска, тормоза, два модуля плат, электрический разъем, винты переключения режимов вентилей, отпуска и тормоза, регулировочный винт.
Дополнительная приставка состоит из корпуса с фланцем, на котором смонтированы два электропневматических вентиля, предназначенные для реализации режимов «Перекрыша без питания», «Перекрыша с питанием» соответственно, два модуля плат и электрический разъем. Внутри корпуса интегрирован клапан обратный.
Недостатком этого технического решения является отсутствие в кране машиниста положения Va (медленная разрядка тормозной магистрали) и положения VI (экстренное торможение).
Техническая задача, решаемая с помощью предлагаемого технического решения направлена на преодоление указанных недостатков, а именно, обеспечение крана машиниста с дистанционным управлением автоматическим пневматическим тормозом положением Va (медленная разрядка тормозной магистрали) и положением VI (экстренное торможение).
Техническая задача с помощью предлагаемого технического решения достигается тем, что кран машиниста с дистанционным управлением автоматическим пневматическим тормозом, содержащий корпус с крышкой и рукоятью, взаимодействующей с размещенным в крышке золотником, установленные в корпусе уравнительный поршень и выпускной клапан, контроллер, установленный на специальном фланце на крышке крана машиниста, реализованный с помощью микропереключателей и жгута, находящихся под крышкой, причем на корпусе крана машиниста закреплены редуктор и стабилизатор темпа ликвидации сверхзарядного давления, штуцеры для подсоединения трубопроводов тормозной и питательной магистралей соответственно, штуцер для подсоединения уравнительного резервуара, а также смонтированные между корпусами крана машиниста и редуктора основной приставкой и между корпусами крана машиниста и стабилизатора дополнительной приставкой, причем основная приставка состоит из корпуса с фланцем, на котором смонтированы два модуля плат, электрический разъем, электропневматический вентиль сверхзарядного давления, предназначенный для реализации режимов «Зарядка и Отпуск», электропневматический вентиль отпуска, предназначенный для реализации режима «Отпуск (Поездное)», электропневматический вентиль тормоза, предназначенный для реализации режима «Служебное торможение», электропневматические вентили пневматически сообщены с каналами крана машиниста и редуктора, а электрически подключены через электрический разъем к источнику питания и электрической схеме локомотива, при этом приставка выполнена с резервным режимом функционирования и включает винты переключения режимов вентилей тормоза и отпуска, винт регулировочный, а дополнительная приставка состоит из корпуса с фланцем, на котором смонтированы два электропневматических вентиля, предназначенные для реализации режимов «Перекрыша без питания», «Перекрыша с питанием» соответственно, два модуля плат и электрический разъем, а внутри корпуса интегрирован клапан обратный, для реализации режимов работы автоматического тормоза в режиме дистанционного управления кран машиниста дополнительно снабжен электропневматическим вентилем, который обеспечивает режим «Замедленное торможение» и соединяет уравнительный резервуар с атмосферой через калиброванное отверстие, которое обеспечивает медленный темп разрядки тормозной магистрали, и электропневматическим клапаном, который обеспечивает режим «Экстренное торможение» и соединяет тормозную магистраль с атмосферой сечением, обеспечивающим темп экстренного торможения.
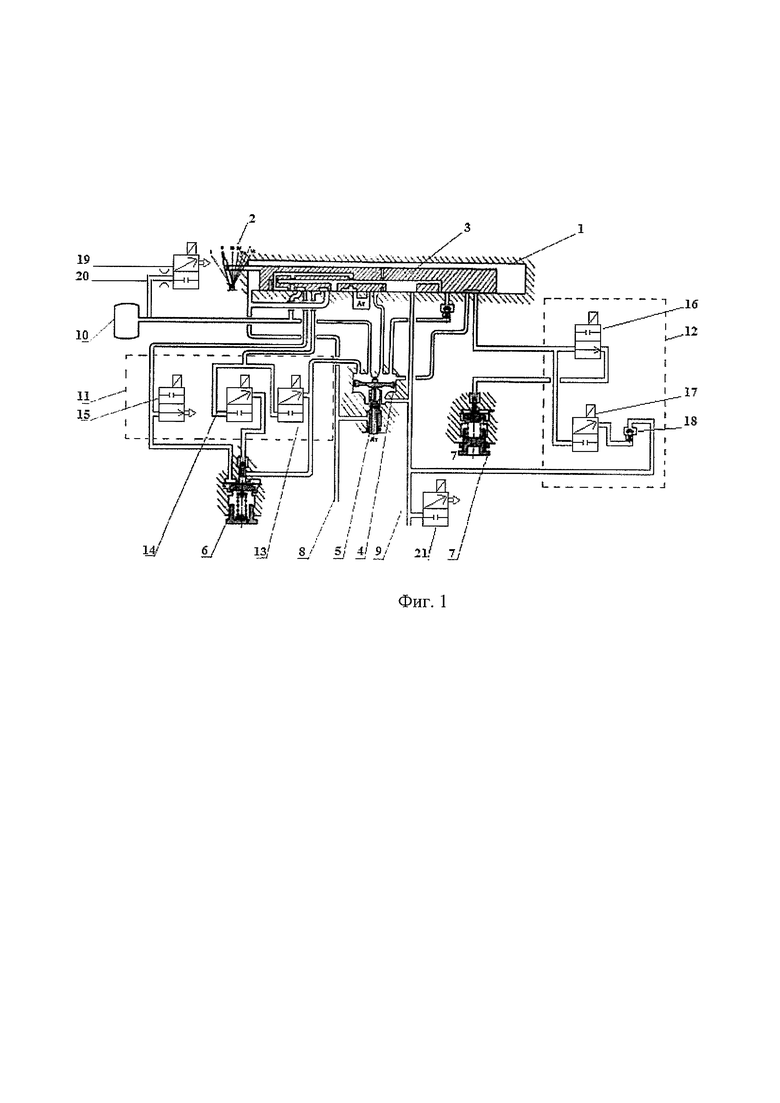
Схема пневматическая крана машиниста с дистанционным управлением автоматическим пневматическим тормозом показана на фиг.
Кран 1 машиниста с дистанционным управлением автоматическим пневматическим тормозом содержит корпус с крышкой (на схеме не показаны) и рукоятью 2, взаимодействующей с размещенным в крышке золотником 3, установленные в корпусе уравнительный поршень 4 и выпускной клапан 5, контроллер (на схеме не показан). При этом на корпусе крана 1 машиниста закреплены редуктор 6 и стабилизатор 7 темпа ликвидации сверхзарядного давления, штуцеры (на схеме не показаны) для подсоединения трубопроводов 8, 9 питательной и тормозной магистралей соответственно, штуцер (на схеме не показан) для подсоединения уравнительного резервуара 10, а также смонтированные между корпусами крана 1 машиниста и редуктора 6 основную приставку 11 и между корпусами крана 1 машиниста и стабилизатора 7 дополнительную приставку 12.
Основная приставка 11 крана 1 машиниста состоит из корпуса с фланцем (на схеме не показаны), на котором смонтированы электропневматические вентили 13, 14, 15 сверхзарядного давления, отпуска, тормоза, предназначенные для реализации режимов «Зарядка и отпуск», «Отпуск (Поездное)», «Служебное торможение». Приставка 11 выполнена с резервным режимом функционирования и включает винты переключения режимов вентилей 15, 14 (на схеме не показаны) тормоза и отпуска, винт регулировочный (на схеме не показан). Электропневматические вентили 13, 14, 15 пневматически сообщены с каналами крана 1 машиниста и редуктора 6, а электрически подключены через электрический разъем (на схеме не показан) к источнику питания и электрической схеме локомотива (на схеме не показаны).
Дополнительная приставка 12 состоит из корпуса с фланцем (на схеме не показаны), на котором смонтированы два электропневматических вентиля 16, 17, предназначенные для реализации режимов «Перекрыша без питания», «Перекрыша с питанием» соответственно, без воздействия на рукоять 2 крана 1 машиниста, два модуля плат и электрический разъем (на схеме не показаны). Внутри корпуса (на схеме не показан) интегрирован клапан 18 обратный.
Уравнительный резервуар 10 соединен через электропневматический вентиль 19 и калиброванное отверстие 20 с атмосферой для обеспечения медленной разрядки тормозной магистрали. Тормозная магистраль соединена через электропневматический клапан 21 с атмосферой сечением, обеспечивающим разрядку тормозной магистрали темпом экстренного торможения.
Предлагаемое техническое решение обеспечивает реализацию следующих функций:
- дистанционное управление автоматическим тормозом и электропневматическим тормозом;
- ручное управление автоматическим тормозом и электропневматическим тормозом.
Состояние электропневматических вентилей и клапана для всех режимов работы автоматического тормоза в режиме дистанционного управления отражено в таблице.
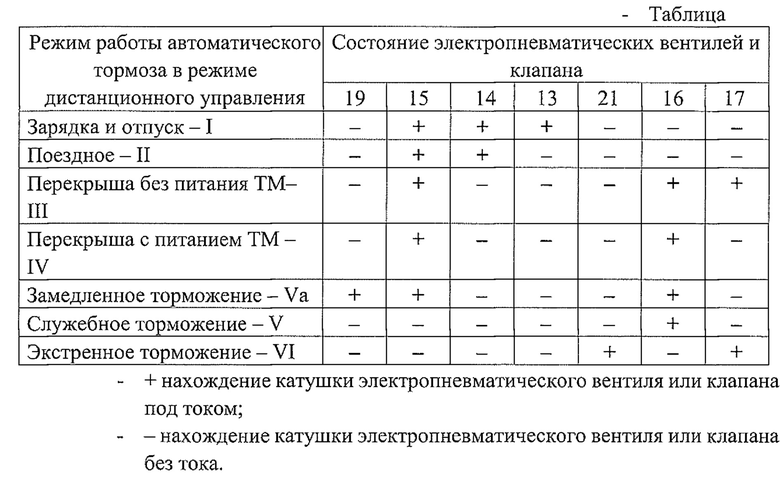
Кран машиниста с дистанционным управлением в режиме дистанционного управления работает следующим образом. Рукоять крана машиниста 2 постоянно должна находиться во II положении.
Для создания I положения должны находиться под напряжением вентиль сверхзарядки 13, вентиль отпуска 14 и вентиль торможения 15. При этом обеспечивается соединение питательной магистрали 8 с камерой над уравнительным поршнем 4 и уравнительным резервуаром 10 через калиброванное отверстие крана машиниста.
Во II положении дистанционного управления под током находятся вентили торможения 15 и отпуска 14. При этом обеспечивается соединение камеры над уравнительным поршнем 4 и уравнительного резервуара 10 с редуктором 6 через вентиль отпуска 14. Одновременно обеспечивается соединение камеры над уравнительным поршнем 4 через электропневматический вентиль 16, который находится в обесточенном состоянии, со стабилизатором 7 для ликвидации сверхзарядки.
В III положении дистанционного управления (перекрыша без питания тормозной магистрали) под током находится вентиль торможения 15 и вентили 16 и 17 дополнительной приставки 12. В результате камера над уравнительным поршнем 4 и уравнительный резервуар 10 вентилем отпуска 14 отключается от питания через редуктор 6 и соединяется через электропневматический вентиль 17 и обратный клапан 18 с тормозной магистралью. При этом камера над уравнительным поршнем 4 и уравнительный резервуар 10 отключаются от стабилизатора 7 включенным электропневматическим вентилем 16.
В IV положении под током находится вентиль торможения 15 и вентиль 16 дополнительной приставки 12, при этом камера над уравнительным поршнем 4 и уравнительный резервуар 10 отсоединены от редуктора 6 и стабилизатора 7.
В положении Va под током находится вентиль торможения 15, вентиль медленной разрядки тормозной магистрали 19 и вентиль подключения стабилизатора 16. При этом камера над уравнительным поршнем 4 и уравнительный резервуар 10 отсоединяются от редуктора 6 и разряжаются в атмосферу через электропневматический вентиль 19 и калиброванное отверстие 20 медленным темпом. Вентиль 16 при этом перекрывает соединение камеры над уравнительным поршнем 4 со стабилизатором 7.
В положении V под током находится электропневматический вентиль 16, в результате камера над уравнительным поршнем 4 и уравнительный резервуар 10 через вентиль торможения 15 соединяются с атмосферой темпом служебного торможения. Вентиль 16 обеспечивает отключение камеры над уравнительным поршнем 4 со стабилизатором 7.
В VI положении под током находится электропневматический клапан 21 и электропневматический вентиль 17. В результате электропневматический клапан 21 обеспечивает разрядку тормозной магистрали темпом экстренного торможения, а электропневматический вентиль 17 обеспечивает соединение камеры над уравнительным поршнем 4 и уравнительного резервуара 10 с разряжаемой тормозной магистралью через обратный клапан 18.
Таким образом, предлагаемое техническое решение в полном объеме обеспечивает в кране машиниста реализацию дистанционного и ручного управления автоматическим тормозом и электропневматическим тормозом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран машиниста железнодорожного транспортного средства | 2016 |
|
RU2635732C1 |
| КРАН МАШИНИСТА ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2444454C1 |
| КРАН МАШИНИСТА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2329167C1 |
| КРАН МАШИНИСТА ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2631126C2 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДА | 2011 |
|
RU2478053C2 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДА С ЛОКОМОТИВНОЙ ТЯГОЙ | 2003 |
|
RU2232692C1 |
| Кран машиниста локомотива | 1982 |
|
SU1081035A1 |
| Кран машиниста железнодорожного транспортного средства | 1986 |
|
SU1382700A1 |
| Кран машиниста | 1989 |
|
SU1787837A1 |
| КРАН МАШИНИСТА | 1967 |
|
SU201462A1 |
Изобретение может быть использовано для дистанционного управления тормозными процессами поезда с локомотивной тягой. Кран машиниста с дистанционным управлением автоматическим пневматическим тормозом содержит корпус с крышкой и рукоятью, взаимодействующей с размещенным в крышке золотником, установленные в корпусе уравнительный поршень и выпускной клапан, контроллер. На корпусе крана закреплены редуктор и стабилизатор темпа ликвидации сверхзарядного давления, штуцеры для подсоединения трубопроводов питательной и тормозной магистралей, штуцер для подсоединения уравнительного резервуара, а также смонтированные между корпусами крана и редуктора основную приставку и между корпусами крана и стабилизатора дополнительную приставку. Основная приставка крана состоит из корпуса с фланцем, на котором смонтированы электропневматические вентили сверхзарядного давления, отпуска, тормоза, предназначенные для реализации режимов «Зарядка и отпуск», «Отпуск (Поездное)», «Служебное торможение». Приставка выполнена с резервным режимом. Электропневматические вентили пневматически сообщены с каналами крана и редуктора, а электрически подключены через электрический разъем к источнику питания и электрической схеме локомотива. Дополнительная приставка состоит из корпуса с фланцем, на котором смонтированы два электропневматических вентиля предназначенные для реализации режимов «Перекрыша без питания», «Перекрыша с питанием» без воздействия на рукоять крана машиниста, два модуля плат и электрический разъем, а внутри корпуса интегрирован клапан обратный. Уравнительный резервуар соединен через электропневматический вентиль и калиброванное отверстие с атмосферой для обеспечения медленной разрядки тормозной магистрали. Тормозная магистраль соединена через электропневматический клапан с атмосферой с сечением, обеспечивающим разрядку тормозной магистрали темпом экстренного торможения. Технический результат - обеспечение крана машиниста с дистанционным управлением автоматическим пневматическим тормозом положением Va (медленная разрядка тормозной магистрали) и положением VI (экстренное торможение). 1 ил.
Кран машиниста с дистанционным управлением автоматическим пневматическим тормозом, содержащий корпус с крышкой и рукоятью, взаимодействующей с размещенным в крышке золотником, установленные в корпусе уравнительный поршень и выпускной клапан, контроллер, установленный на фланце на крышке крана машиниста, реализованный с помощью микропереключателей и жгута, находящихся под крышкой, причем на корпусе крана машиниста закреплены редуктор и стабилизатор темпа ликвидации сверхзарядного давления, штуцеры для подсоединения трубопроводов тормозной и питательной магистралей соответственно, штуцер для подсоединения уравнительного резервуара, а также смонтированные между корпусами крана машиниста и редуктора основной приставкой и между корпусами крана машиниста и стабилизатора дополнительной приставкой, причем основная приставка состоит из корпуса с фланцем, на котором смонтированы два модуля плат, электрический разъем, электропневматический вентиль сверхзарядного давления, предназначенный для реализации режимов «Зарядка и Отпуск», электропневматический вентиль отпуска, предназначенный для реализации режима «Отпуск (Поездное)», электропневматический вентиль тормоза, предназначенный для реализации режима «Служебное торможение», электропневматические вентили пневматически сообщены с каналами крана машиниста и редуктора, а электрически подключены через электрический разъем к источнику питания и электрической схеме локомотива, при этом приставка выполнена с резервным режимом функционирования и включает винты переключения режимов вентилей тормоза и отпуска, винт регулировочный, а дополнительная приставка состоит из корпуса с фланцем, на котором смонтированы два электропневматических вентиля, предназначенные для реализации режимов «Перекрыша без питания», «Перекрыша с питанием» соответственно, два модуля плат и электрический разъем, а внутри корпуса интегрирован клапан обратный, отличающийся тем, что для реализации режимов работы автоматического тормоза в режиме дистанционного управления кран машиниста дополнительно снабжен электропневматическим вентилем, который обеспечивает режим «Замедленное торможение» и соединяет уравнительный резервуар с атмосферой через калиброванное отверстие, которое обеспечивает медленный темп разрядки тормозной магистрали, и электропневматическим клапаном, который обеспечивает режим «Экстренное торможение» и соединяет тормозную магистраль с атмосферой сечением, обеспечивающим темп экстренного торможения.
| А. А. Вишневский,Ф. В. Бассин и Е. Ф. Дриго | 0 |
|
SU211025A1 |
| ЭЛЕКТРОД ГАЗООЧИСТИТЕЛЬНОГО ЭЛЕКТРОФИЛЬТРА | 0 |
|
SU176567A1 |
| Кран машиниста с дистанционным управлением Чекина | 1987 |
|
SU1511165A2 |
