Изобретение относится к области радиолокации и может быть использовано при обнаружении отражающих радиоизлучение объектов.
Для обеспечения контроля воздушного пространства необходимо в контролируемой радиолокационной станцией (РЛС) зоне обнаруживать объекты с высокой вероятностью и измерять их координаты с требуемой точностью.
Для обнаружения и точного измерения угловых координат объектов в активных обзорных РЛС используют последовательный обзор направлений контролируемой зоны с помощью антенны, имеющей узкую диаграмму направленности по одной или по обеим угловым координатам (Васин В.В. и др. Радиолокационные устройства (теория и принципы построения). М.: Сов. радио, 1970, с.86-95).
Недостаток этого способа состоит в том, что концентрация излучаемой энергии при осмотре каждого направления недостаточна для обнаружения объектов с малой эффективной поверхностью рассеяния, поскольку за короткий период обзора (единицы секунд) требуется осмотреть контролируемую зону, состоящую из тысяч направлений.
Увеличить концентрацию можно за счет перераспределения энергии РЛС: увеличить излучение энергии в одних направлениях за счет сокращения в других.
Целесообразно увеличивать затраты энергии в тех направлениях, в которых более вероятно нахождение объекта. Поэтому важно получить информацию о наличии таких направлений (обнаружить объекты), после чего за счет увеличения концентрации энергии РЛС в этих направлениях можно измерить дальность до объектов, их скорость, распознать класс, уточнить угловые координаты (патент РФ №2149421).
Известен способ обнаружения объектов на основе приема излучений их бортовых радиоэлектронных средств (РЭС), например, пеленгатором (Теоретические основы радиолокации, под ред. Я.Д.Ширмана. М.: Сов. радио, 1970, с.10-11). При этом решение об обнаружении объекта в осматриваемом направлении (с угловыми координатами εi, и βi, по углу места и азимуту соответственно, i=1, ..., N, где N - число положений приемного луча антенны пеленгатора в контролируемой зоне) принимают при обнаружении излучений бортовых РЭС. Одним из распространенных РЭС является бортовая РЛС. Однако закономерность структуры сигнала РЭС, поиск излучений которых осуществляют, как правило, неизвестна, поэтому согласованная обработка таких сигналов указанным способом невозможна (Теоретические основы радиолокации, под ред. Я.Д.Ширмана. М.: Сов. радио, 1970, с.110-114). Кроме того, способ не всегда может быть применим, так как не все объекты оснащены постоянно излучающими бортовыми РЭС, а в ряде случаев даже при наличии таких РЭС они могут преднамеренно выключаться.
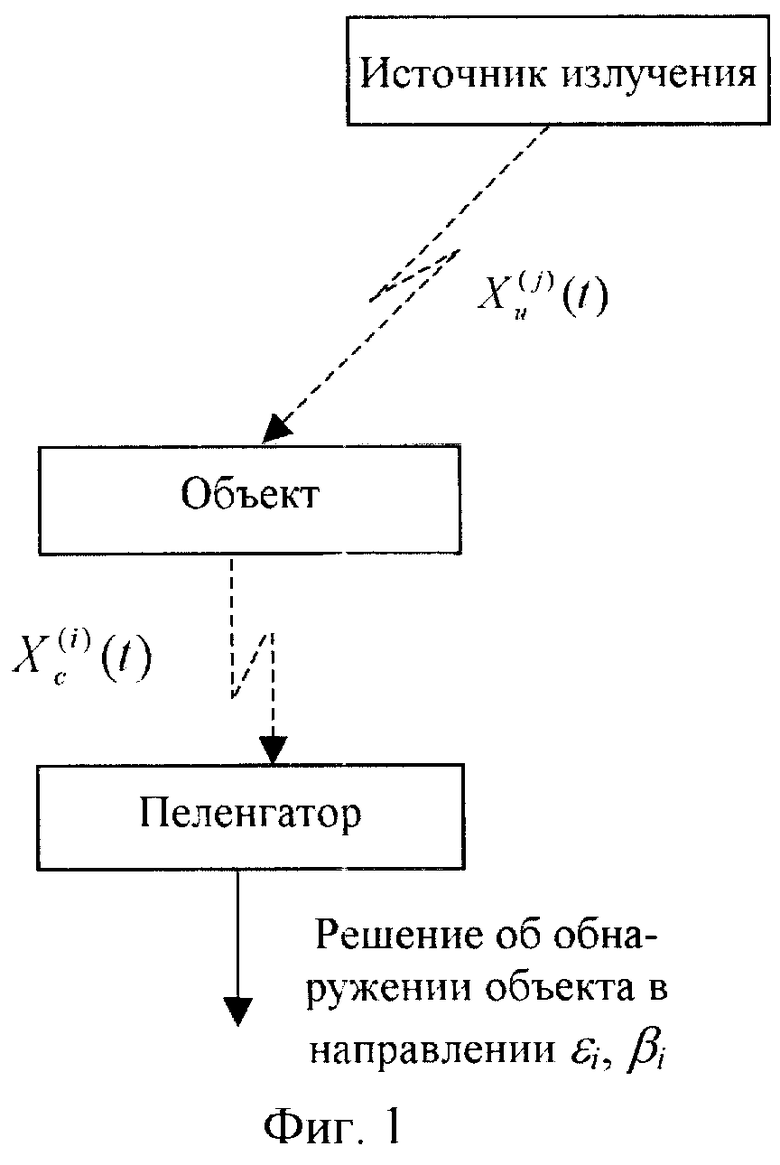
Наиболее близким техническим решением является способ (фиг.1), основанный на приеме излучений из контролируемого направления, измерении уровня излучения и принятии решения об обнаружении объекта, если измеренная величина превышает пороговое значение (Васин В.В. и др. Радиолокационные устройства (теория и принципы построения). М.: Сов, радио, 1970, с.25). Источниками излучения могут являться передатчики телецентров, радиовещательные станции, источники природного характера, например молнии, солнце, некоторые звезды и др. (Справочник по радиолокации. Под ред. М. Сколника, том 4. М.: Сов. радио, 1978, с.213, последний абз., с.214, 1-3 абз.). Источниками излучений могут быть также наземные и бортовые активные РЛС. При современной насыщенности территорий радиолокационными средствами каждый объект, попадающий в зону контроля, непрерывно облучается каким-либо источником излучения.
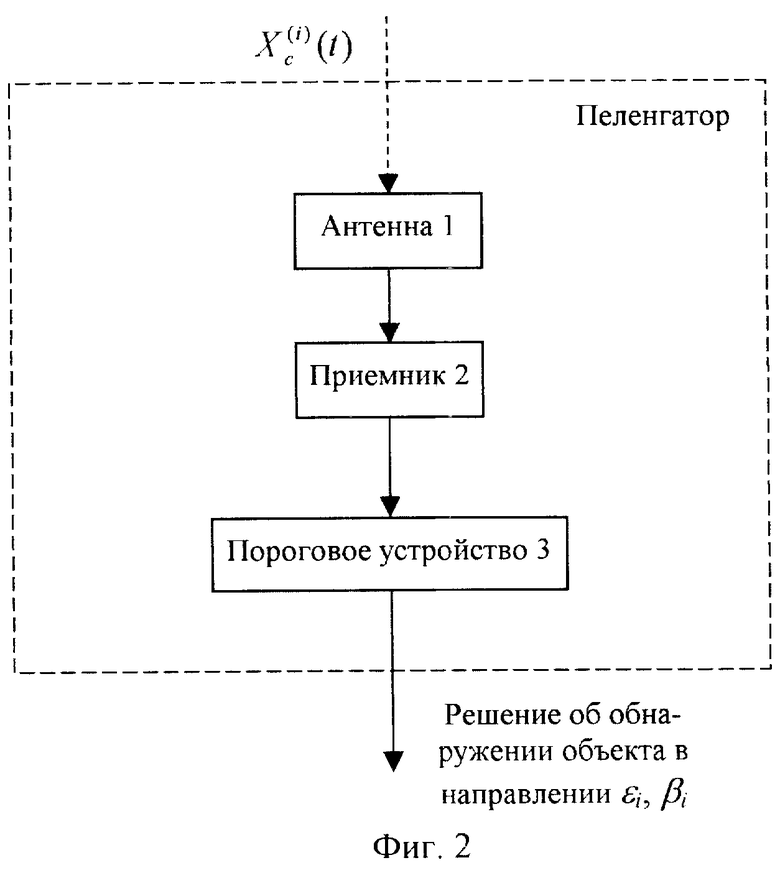
Наиболее близкий способ реализуется с помощью устройства, представляющего собой пеленгатор (фиг.2), содержащий последовательно соединенные антенну 1, приемник 2 и пороговое устройство 3, выход которого является выходом пеленгатора (Теоретические основы радиолокации. Под ред. В.Е.Дулевича. М.: Сов. радио, 1978, с.261).
В связи с тем, что источники излучения, облучающие объект, являются случайными, то структура и время прихода принимаемых пеленгатором отражений заранее неизвестна. Обработка такого сигнала, проводимая в соответствии с известным способом, всегда имеет потери относительно согласованной обработки при известной структуре сигнала. В результате дальность обнаружения малозаметного объекта при использовании наиболее близкого способа может быть недостаточной.
Заявляемое изобретение направлено на решение задачи увеличения дальности обнаружения объекта в контролируемом направлении.
Задача решается за счет корреляционной обработки прямого излучения источника и излучения того же источника, отраженного от объекта.
Указанный технический результат достигается тем, что в способе радиолокационного обнаружения объектов, основанном на приеме излучений из контролируемых направлений, измерении параметров излучений и принятии решения об обнаружении объекта, если измеренная величина превышает пороговое значение, согласно изобретению дополнительно производят поиск источников излучения, принимают излучения этих источников, измеряют корреляцию принимаемых излучений с излучениями из контролируемых направлений и сравнивают ее значение с порогом.
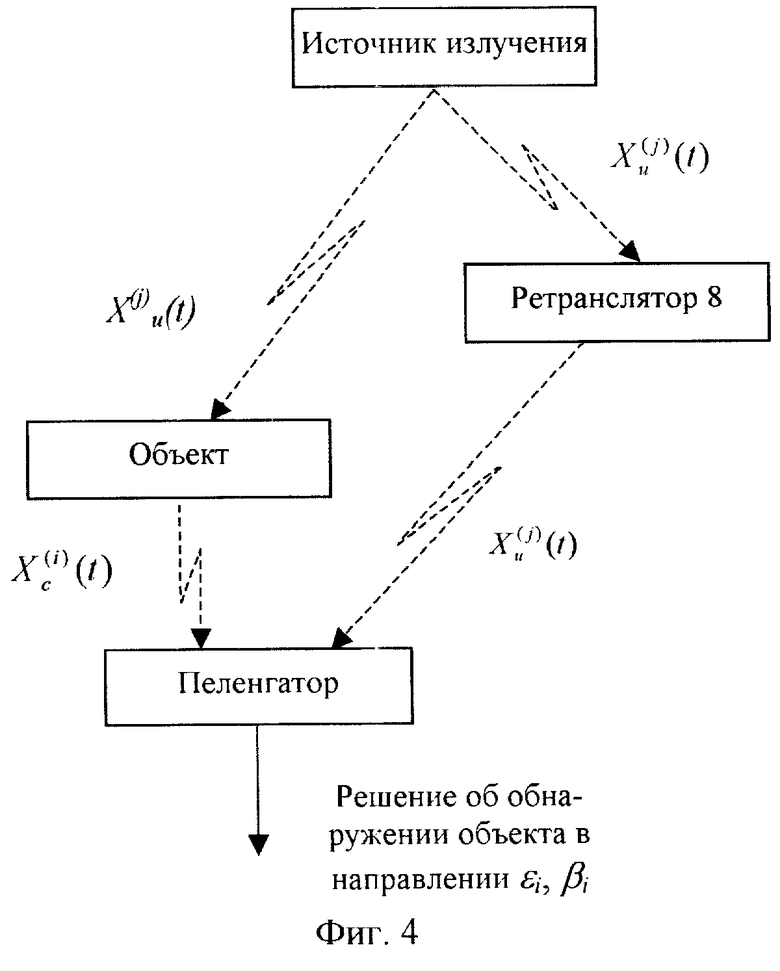
Указанный технический результат достигается также тем, что осмотр пространства и прием излучений осуществляют с помощью ретранслятора, расположенного в зоне прямой видимости источника излучения и РЛС.
Суть изобретения состоит в следующем.
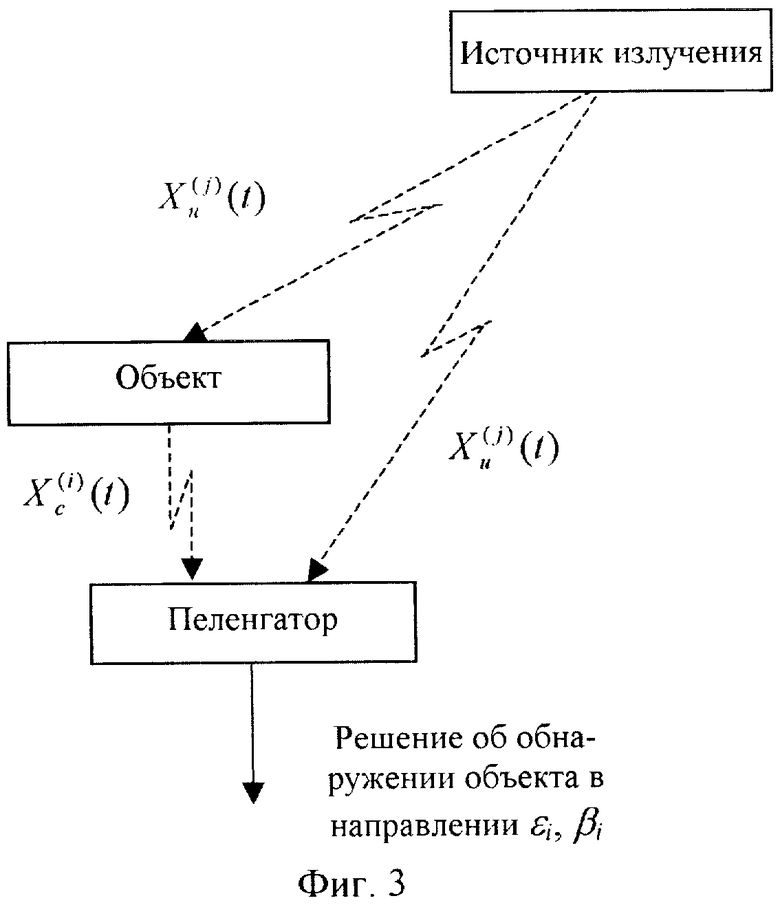
Прием излучений производят из двух направлений контролируемой зоны (фиг.3) двумя каналами обнаружения (фиг.5). Антенну одного канала направляют в очередное контролируемое направление зоны с координатами εi, βi, а с помощью второй осматривают пространство возможного расположения источников излучения - зону поиска источников излучения.
Первой антенной в i-м направлении контролируемой зоны принимают излучение
где М - число источников излучения, облучающих объект;

 - излучение k-то источника, отраженное от объекта в i-м направлении;
- излучение k-то источника, отраженное от объекта в i-м направлении;
Δtik - разность хода прямого излучения k-го источника и излучения этого же источника, отраженного от объекта в i-м направлении контролируемой зоны;
n(t) - шум.
Второй антенной в j-м направлении зоны поиска источников излучения принимают излучение
где 
 - излучение k-го источника в j-м направлении зоны поиска источника излучения.
- излучение k-го источника в j-м направлении зоны поиска источника излучения.
Решение об обнаружении объекта в направлении εi, βi принимают по измеренной корреляции излучений  и
и  . Для этого оценивают взаимную функцию корреляции
. Для этого оценивают взаимную функцию корреляции
где Т- время наблюдения;
τ - величина задержки сигнала.
Значение максимума функции корреляции сравнивают с установленным порогом R0, выбранным исходя из дисперсии собственных шумов приемника пеленгатора.
Для исключения потерь, связанных с неизвестной начальной фазой принимаемого излучения, применена схема коррелятора с двумя квадратурными каналами (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана. М.: Сов. радио, 1970, с.108-109).
Обработка в предлагаемом техническом решении при неизвестной структуре принимаемого излучения является наилучшей. Ее результат совпадает с результатом оптимальной фильтрации (Теоретические основы радиолокации. Под ред. Я.Д. Ширмана. М.: Сов. радио, 1970, с.110-114). Энергетический выигрыш, достигаемый относительно наиболее близкого способа, позволяет увеличить дальность обнаружения объекта.
Важной особенностью заявляемого способа является возможность использования для обнаружения объекта каждый раз нового источника излучения с неизвестным местоположением и неизвестной структурой сигнала.
В случае, когда источник излучения расположен вне прямой видимости пеленгатора (например, наземная РЛС), предлагается использовать ретранслятор.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - известный способ обнаружения объекта, облучаемого посторонним источником излучения - ближайший аналог.
Фиг.2 - блок-схема пеленгатора, реализующего наиболее близкий способ обнаружения объекта.
Фиг.3 - заявляемый способ обнаружения объекта.
Фиг.4 - заявляемый способ обнаружения объекта с использованием ретранслятора.
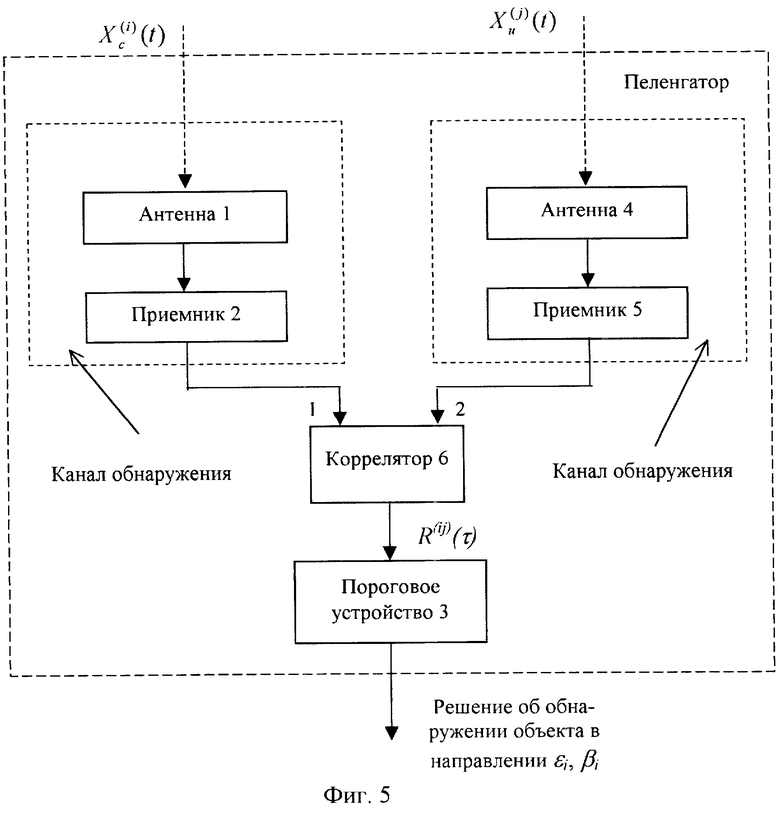
Фиг.5 - блок-схема пеленгатора, реализующего заявляемый способ.
Пеленгатор содержит (фиг.5) последовательно соединенные антенну 1 и приемник 2, а также пороговое устройство 3, выход которого является выходом пеленгатора, последовательно соединенные антенну 4, приемник 5, а также коррелятор 6, первый и второй входы которого соединены с выходами приемников 2 и 5 соответственно, а выход - с входом порогового устройства 3.
Пеленгатор может быть выполнен с использованием следующих функциональных элементов.
Антенны 1 и 4 - приемные ФАР с двумерным электронным сканированием по азимуту и углу места и с круговым механическим вращением (Справочник по радиолокации, под ред. М. Сколника, т.2. М.: Сов. радио, 1977, с.132-138).
Приемники 2 и 5 - супергетеродинного типа (Справочник по основам радиолокационной техники. М., 1967, с.343-344).
Коррелятор 6 - многоканальный коррелятор (Теоретические основы радиолокации, под ред. Я.Д.Ширмана. М.: Сов. радио, 1970, с.500).
Пороговое устройство 3 - цифровая схема сравнения (Интегральные микросхемы. Справочник под ред. Б.В.Тарабрина. М.: Радио и связь, 1984).
Предлагаемое устройство (фиг.5) работает следующим образом.
Антенна 1 устанавливается в очередное направление контролируемой зоны. С помощью антенны 4 производится осмотр в зоне поиска источников излучения. При этом принимаемые излучения  в приемниках 2 и 5 преобразуются на промежуточную частоту и поступают в коррелятор 6, где вычисляется их корреляционная функция R(ij)(τ) и определяется ее максимум. В пороговом устройстве 3 максимум корреляционной функции сравнивается с пороговым уровнем R0. Если пороговый уровень превышен, то принятое в контролируемом направлении излучение считается отражением от объекта, т.е. принимается решение об обнаружении объекта в контролируемом направлении. Антенна 1 устанавливается в следующее направление контролируемой зоны и процесс повторяется.
в приемниках 2 и 5 преобразуются на промежуточную частоту и поступают в коррелятор 6, где вычисляется их корреляционная функция R(ij)(τ) и определяется ее максимум. В пороговом устройстве 3 максимум корреляционной функции сравнивается с пороговым уровнем R0. Если пороговый уровень превышен, то принятое в контролируемом направлении излучение считается отражением от объекта, т.е. принимается решение об обнаружении объекта в контролируемом направлении. Антенна 1 устанавливается в следующее направление контролируемой зоны и процесс повторяется.
Изобретение относится к области радиолокации и может быть использовано при обнаружении отражающих радиоизлучение объектов. Достигаемый технический результат - увеличение вероятности обнаружения объекта в контролируемом направлении. Результат достигается за счет корреляционной обработки прямого излучения источника и излучения того же источника, отраженного от объекта. 1 з.п. ф-лы, 5 ил.
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ И РЛС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2149421C1 |
| US 3943514, 09.03.1976 | |||
| Теоретические основы радиолокации./Под ред | |||
| Я.Д | |||
| ШИРМАНА | |||
| - М.: Советское радио, 1970, с.102-104, 108-114, 118, 236 и 237, рис.3.11 | |||
| Справочник по радиолокации./Ред | |||
| М | |||
| СКОЛНИК | |||
| - М.: Советское радио, 1978, т.4, с.213 и 214 | |||
| Словарь радиолюбителя./Под ред | |||
| Л.П | |||
| КРАЙЗМЕРА | |||
| Энергия | |||
| Ленинградское отделение, с.407 и 408 | |||
| ДЫМОВА А.И | |||
| и др | |||
| Радиотехнические системы | |||
| - М.: Советское радио, 1975, с.63-66, рис.2.10, с.81 и 82. | |||

