Изобретение относится к области радиолокации и может быть использовано в перспективных РЛС для управления воздушным движением и для контроля воздушного пространства. Для обеспечения управления и контроля нужно прежде всего иметь возможность обнаруживать объект с высокой вероятностью на границе контролируемой зоны и разрешать объекты, разнесенные относительно РЛС на 1 - 2o.
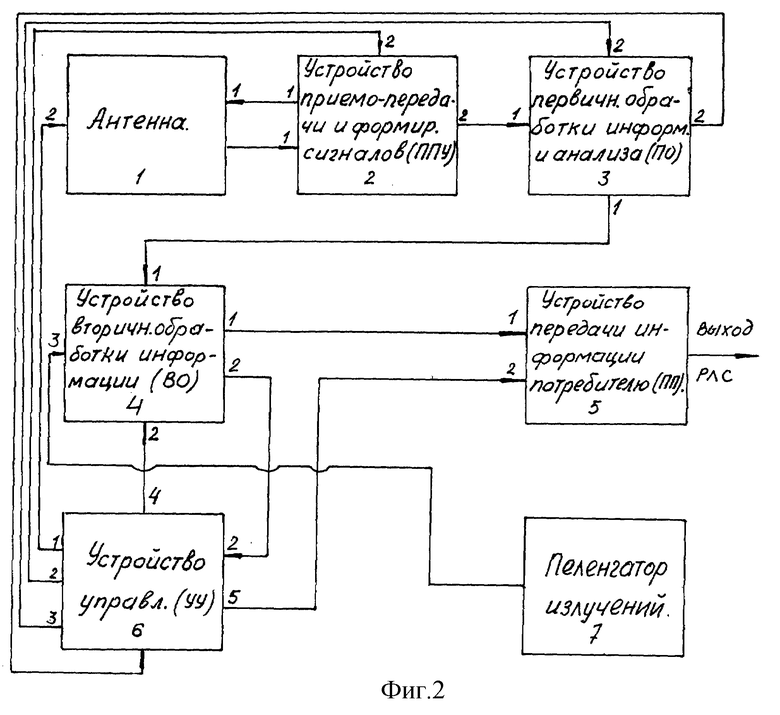
Как правило, для выполнения этих функций используют РЛС с игольчатой формой диаграммы направленности антенны в S - диапазоне, например РЛС RAT-31S ("Радиоэлектроника за рубежом, 1980 г., N 17, с. 23). Построение такой РЛС не отличается от классического (Кузьмин С.С. Основы проектирования систем цифровой обработки радиолокационной информации, "Радио и связь", М., 1986, с. 17). РЛС содержит (см. фиг. 1) антенну 1, устройство 2 приемо-передачи и формирователя сигналов (ППУ), устройство 3 первичной обработки информации и анализа внешних условий (ПО), устройство 4 вторичной обработки (ВО), устройство 5 передачи информации потребителю (ПП), устройство 6 управления (УУ), при этом 1-й вход-выход антенны соединен с 1-м выходом - 1-м входом устройства 2 ППУ, выход которого соединен с 1-м входом устройства 3 ПО, 1-й выход ПО соединен с 1-м входом устройства 4 ВО, выход которого соединен с 1-м входом устройства 5 ПП, 2-й выход ПО соединен со входом устройства 6 УУ, 1-й, 2-й, 3-й, 4-й, 5-й выходы которого соединены со 2-ми входами антенны 1, устройства 2-ППУ, 3-ПО, 4-ВО, 5-ПП, выход устройства 5 ПП является выходом РЛС.
РЛС RAT-31S обнаруживает воздушные объекты с эффективной площадью рассеяния (ЭПР) σ = 3 м2 на дальности 100 км. Недостаток таких РЛС состоит в трудности обеспечения требуемой дальности обнаружения современных объектов. Эта проблема возникает при решении задачи обнаружения малозаметных объектов, под которыми имеются в виду как летательные аппараты с малыми линейными размерами, т. е. с малой ЭПР, так и объекты, созданные по технологии Stealth (Interavia, 1987, IV, p. 331-333), что эквивалентно также малой ЭПР. Так, если ЭПР малозаметного объекта составляет, например, 0,1 м2, то для его обнаружения на дальности 100 км необходимо увеличить затраты энергии RAT-31S в 30 раз. Увеличить эти затраты можно было бы за счет концентрации энергии РЛС в отдельных направлениях за счет уменьшения в других, но для РЛС кругового обзора это не представляется возможным, поскольку при отсутствии дополнительной информации все направления равнозначны. Известны способы получения и использования такой информации.
Известен способ радиолокационного обнаружения и сопровождения объектов, основанный на обнаружении объектов, измерении углового размера пакета отраженных от них сигналов и координат его центра с помощью длинноволновой РЛС (РЛСд), на разрешении по этим данным объектов с помощью коротковолновой РЛС (РЛСк), на привязке их координат к координатам центра пакета, на сопровождении их с помощью РЛСд по центру пакета и повторении операций РЛСк после изменения размера пакета (Патент 2092868, 6 G 01 S 13/04).
Эффективность способа основана на том, что современные летательные аппараты (ЛА) имеют в длинноволновом ЭПР значительно выше, чем в коротковолновом. Так, в УВЧ-диапазоне ( λ = 30 см - 1 м) ЭПР в 7 раз выше, чем в S-диапазоне, а для перспективных ЛА эта разница составляет 100 раз (Бинти-46 (2291), ТАСС 12.11.86).
Это означает, что затраты энергии на обнаружение перспективных ЛА в УВЧ-диапазоне при прочих равных условиях потребуется в 100 раз меньше, чем в S-диапазоне.
Экономия затрат энергии на обнаружении и сопротивление объектов РЛСк в этом способе происходит за счет того, что вместо обзора всего пространства, в процессе которого необходимо было бы излучать энергию в объеме всего контролируемого пространства, излучают ее только в направлениях, в которых РЛСд обнаружила объекты, а при сопровождении РЛСк используют эпизодически. При этом надежность обнаружения объектов на заданных рубежах можно обеспечить на уровне, достигаемом РЛСд (за счет концентрации энергии РЛСк в отдельных направлениях), а разрешающую способность по угловым координатам - на уровне РЛСк.
Недостаток способа состоит в необходимости иметь еще и РЛСд.
Наиболее близким техническим решением является способ, основанный на пеленгации излучений бортовых радиоэлектронных средств (РЭС) объекта из разнесенных в пространстве точек, на вычислении координат источника излучений триангуляционным методом (Справочник по радиолокации под ред. М. Сколника, "Сов. радио", 1978, т. 4, с. 194, 2 абз. сверху и снизу, с. 206, 2-й абз. сверху),
Этот способ функционирует и по отраженной энергии внешних источников (по переизлучениям), облучающих объект, в т.ч. источников природного характера (там же, с. 213, последний абз., с. 214, 3 абз. сверху).
Недостаток этого способа состоит в том, что для его реализации необходимо иметь несколько разнесенных позиций пеленгации с обеспечением системы связи между ними. Такой способ трудно реализовать в мобильных РЛС. Кроме того, при таком способе обнаруженные объекты будут потеряны при прекращении излучений.
Заявленное изобретение направлено на решение следующей задачи: обеспечение возможности обнаружения и сопровождения с помощью РЛС малозаметных объектов на максимальных дальностях.
Эта задача решается на основе увеличения концентрации энергии РЛС в тех направлениях, в которых обнаружены излучения в диапазоне работы бортовых РЭС или внешних источников излучения.
Указанный результат достигается тем, что в известном способе радиолокационного обнаружения и сопровождения объектов, основанном на пеленгации излучений (переизлучений) объектов, согласно изобретению осуществляют поиск и обнаружение объекта в запеленгованном направлении, измеряют его координаты с помощью РЛС и ведут его сопровождение, причем при ведении сопровождения по излучениям с использованием измеренного значения скорости операции РЛС повторяют, если погрешность сопровождения может оказаться больше допустимой: если направление пеленга отклонилось от экстраполированного больше допустимого значения или в случае изменения параметров излучений, а при исчезновении излучений (переизлучений) или при достижении объектом заранее установленного рубежа переходят на сопровождение в активном режиме.
Указанный способ реализуется тем, что в РЛС, содержащую антенну, устройство приемо-передачи (ППУ), устройство первичной информации и анализа внешних условий (ПО), устройство вторичной обработки информации (ВО), устройство передачи информации потребителю (ПП), устройство управления (УУ); при этом 1-й вход-выход антенны соединен с 1-м выходом - 1-м входом устройства ППУ, выход которого соединен с 1-м входом устройства ПО, 1-й выход ПО соединен с 1-м входом устройства ВО, 1-й выход которого соединен с 1-м входом устройства ПП, 2-й выход ПО соединен со входом устройства УУ, 1-й, 2-й, 3-й, 4-й, 5-й выходы которого соединены со 2-ми входами антенны, устройств ППУ, ПО, ВО, ПП, выход устройства ПП является выходом РЛС, согласно изобретению введен пеленгатор излучений, выход которого соединен с 3-м входом устройства ВО, а 2-й выход ВО соединен с 2-м входом УУ.
Изобретение иллюстрируется на фиг. 1 и 2. На фиг. 1 представлена блок-схема РЛС-прототипа, на фиг. 2 - предлагаемой РЛС.
Заявленный способ реализуется с помощью РЛС (фиг. 2), которая содержит антенну 1, устройство 2 приемо-передачи и формирования сигналов ППУ, устройство 3 первичной обработки информации и анализа внешних условий (ПО), устройство 4 вторичной обработки информации (ВО), устройство 5 передачи информации потребителю (ПП), устройство 6 управления (УУ), пеленгатор 7, при этом 1-й вход-выход антенны соединен с 1-м выходом - 1-м входом устройства 2 ППУ, выход которого соединен с 1-м входом устройства 3 ПО, 1-й выход ПО соединен с 1-м входом устройства 4 ВО, 1-й выход которого соединен с 1-м входом устройства 5 ПП, а 2-й - со 2-м входом устройства 6 УУ, 2-й выход ПО соединен с 1-м входом устройства 6 УУ, 1-й, 2-й, 3-й, 4-й, 5-й выход которого соединены со 2-ми входами антенны 1, устройства 2-ППУ, 3-ПО, 4-ВО, 5-ПП, выход пеленгатора 7 соединен с 3-м входом устройства 4 ВО, выход устройства 5 ПП является выходом РЛС.
Суть изобретения состоит в следующем.
С помощью РЛС осуществляют круговой обзор пространства в обычном режиме. Одновременно осуществляют направленный прием пеленгатором сигналов в диапазоне частот, в котором могут работать бортовые РЭС или другие внешние источники подсвета объекта. При обнаружении излучений, измеряют угловые координаты βи и εи его источника (пеленгуют) и с помощью РЛС осуществляют поиск объекта в этом направлении при необходимости за счет замедления скорости обзора, концентрируя в заданном угловом секторе энергию излучения. Определяют дальность и скорость объекта и начинают вести его сопровождение. Для сокращения затрат энергии РЛС, как вариант, могут осуществлять сопровождение объекта, продолжающего излучать (или переизлучать) в пассивном режиме, определяя угловые координаты в j-м периоде обзора βиj и εиj путем пеленгации излучений, а дальность за счет ее экстраполяции с использованием измеренного значения скорости и текущего времени. При этом в случае маневра объекта операции РЛС повторяют. Признаками маневра могут служить отклонения в j-периоде обзора экстраполированных значений βэj и εэj от измеренных βиj и εиj , изменение параметров излучений (например, несущей частоты за счет изменения допплеровской скорости; уровня излучений за счет изменения коэффициента усиления антенны РЭС в направлении РЛС и т.д.). Если объект прекращает излучать (переизлучать) или достигает заранее установленного рубежа (например, рубежа, на котором должна быть выдана уточненная информация потребителю, или рубежа, когда уровень отраженного сигнала стал достаточным для его обнаружения РЛС без концентрации энергии, или рубежа вхождения в зону особой ответственности, например в зону, прилегающую к аэродрому и т.д.), то переходят на сопровождение с помощью РЛС в активном режиме.
Работа РЛС по этому способу состоит в следующем (фиг. 2). После обнаружения пеленгатором 7 излучений значения координат βи и εи (азимут, угол места) с выхода пеленгатора 7 подаются на вход 3 устройства 4 ВО, которое вырабатывает угловой строб вокруг пеленга для просмотра РЛС этого участка зоны и передает его с выхода 2 на вход 2 устройства 6 УУ, которое вырабатывает команды для установки луча антенны 1 в направлениях, ограниченных стробом, формирования и излучения сигналов устройством 2 ППУ. В устройстве 2 ПО осуществляется обнаружение объекта, измерение его координат, эта информация передается на устройство 4 ВО, которое завязывает и ведет трассу объекта (Кузьмин С.С. Основы проектирования... с. 108, глава 3). Если сопровождение ведут по пеленгу излучений и измеренной скорости, то при выполнении одного из условий повторения операций РЛС (отклонение пеленга от экстраполированных значений, изменение параметров излучений) с выхода 2 устройства 4, как и на начальном этапе обнаружения, выдается строб на вход 2 устройства 6 УУ и с помощью РЛС в активном режиме просматривают участок зоны, в котором должен находиться объект.
В случае прекращения объектом излучений, поступление информации с выхода пеленгатора 7 на вход устройства 4 ВО прекращается и в этом случае с выхода 2 устройства 4 ВО на вход 2 устройства 6 УУ передается строб, в котором РЛС будет сопровождать трассу в активном режиме. Аналогичная операция будет осуществляться и при достижении объектом заранее установленного рубежа.
Изобретение относится к радиолокации и может быть использовано в РЛС для управления воздушным движением и для контроля воздушного пространства. Способ и устройство позволяют осуществить поиск, обнаружение объекта в запеленгованном пространстве, измерить его координаты с помощью РЛС и осуществить его сопровождение. Достигаемым техническим результатом является обеспечение возможности обнаружения и сопровождения с помощью РЛС малозаметных объектов на максимальных дальностях. 2 с. и 4 з.п.ф-лы, 2 ил.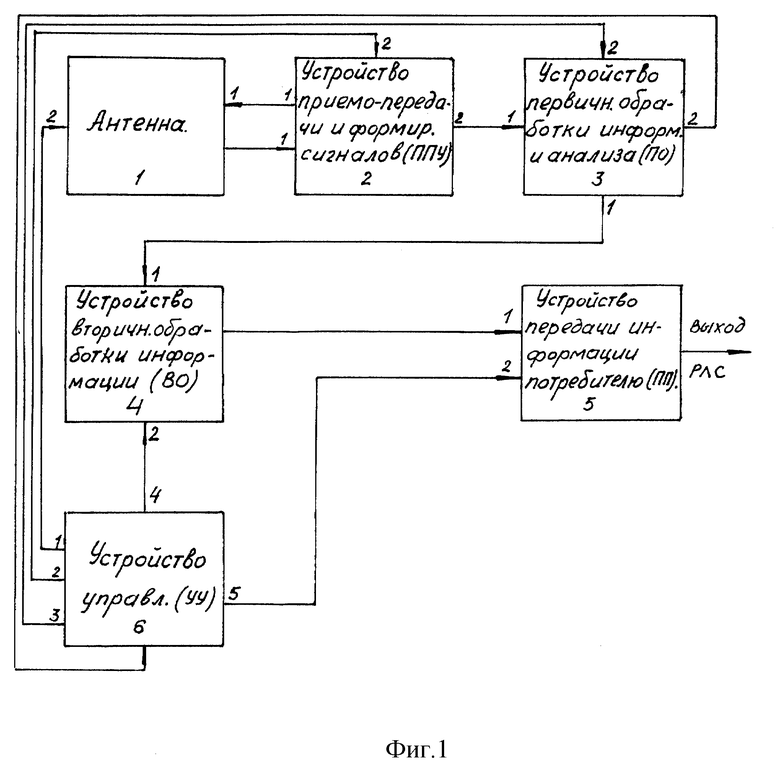
| Справочник по радиолокации | |||
| / Под ред | |||
| М.Сколника | |||
| - М.: Советское радио, 1978, т.4, с.194, 206 | |||
| Катков Е.А., Кромин Г.С | |||
| Основы радиолокационной техники, ч.11 | |||
| - М.: Воениздат МО СССР, 1959, с.357, 358 | |||
| Теоретические основы радиолокации | |||
| /Под ред | |||
| В.Е.Дулевича | |||
| - М.: Советское радио, 1978, с.181 - 184 | |||
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ | 1995 |
|
RU2099738C1 |
| RU 95100483 A1, 10.11.1996 | |||
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ | 1995 |
|
RU2092868C1 |
| DE 1623492, 04.11.1971. | |||

