Предлагаемые технические решения относятся к области радиолокации и могут быть использованы в обзорных радиолокационных станциях (РЛС).
Известен способ активной радиолокации объектов, заключающийся в излучении зондирующих сигналов, приеме отраженных сигналов, измерении времени запаздывания сигналов и угловых координат объектов, вычислении дальности до объектов (Теоретические основы радиолокации./Под ред. Я.Д.Ширмана. - М.: Сов. радио, 1970, с. 9-11).
Известна радиолокационная станция, реализующая известный способ (Теоретические основы радиолокации./Под ред. Я.Д.Ширмана. - М.: Сов. радио, 1970, с. 221), содержащая антенну, антенный переключатель, передатчик, приемник, индикаторное устройство, синхронизатор, причем сигнальный вход/выход антенны соединен с антенным переключателем, вход которого соединен с выходом передатчика, а выход - с входом приемника, выход приемника, в свою очередь, соединен с входом индикаторного устройства, два выхода синхронизатора соединены с входом передатчика и вторым входом индикаторного устройства соответственно, координатный выход антенны соединен с третьим входом индикаторного устройства.
Недостатком известных решений является необходимость облучения всей зоны ответственности РЛС, для чего требуются значительные затраты энергии. Кроме того, постоянное излучение РЛС снижает скрытность ее работы.
Наиболее близким к предлагаемому является способ определения координат объектов, облучаемых источником радиоизлучений, основанный на приеме в разнесенных точках пространства отраженных ими радиоизлучений, измерении временного сдвига между радиоизлучениями и угловых координат объектов, вычислении дальностей до объектов (Теоретические основы радиолокации./Под ред. Я.Д.Ширмана. - М.: Сов. радио, 1970, с. 497).
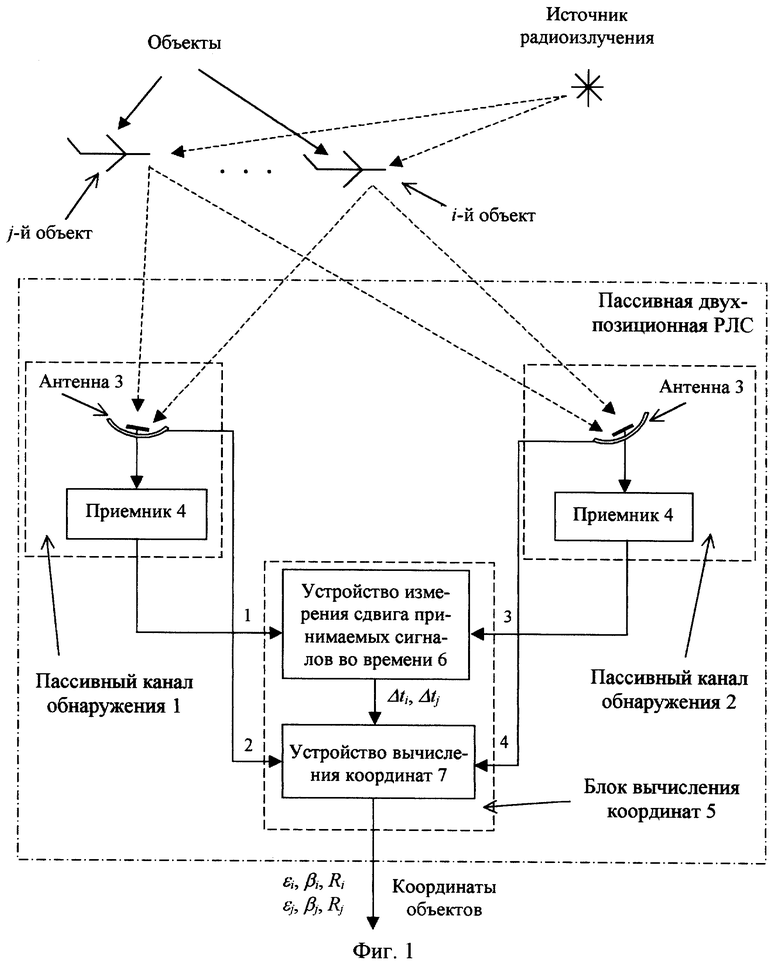
Известна (Теоретические основы радиолокации./Под ред. Я.Д.Ширмана. М.: Сов. радио, 1970, с. 500) двухпозиционная пассивная радиолокационная станция (фиг.1), реализующая известный способ, содержащая разнесенные в пространстве пассивные каналы обнаружения 1 и 2, включающие каждый последовательно соединенные антенну 3 и приемник 4, а также блок вычисления координат 5, содержащий последовательно соединенные устройство измерения сдвига принимаемых сигналов во времени 6 и устройство вычисления координат 7, причем вход устройства измерения сдвига принимаемых сигналов во времени 6 и вход устройства вычисления координат 7 являются первым и вторым входами блока вычисления координат 5 соответственно, вторые входы каждого из этих устройств являются третьим и четвертым входами этого блока, выходы приемников 4 пассивных каналов обнаружения соединены с первым и третьим входами блока вычисления координат 5, а координатные выходы антенн 3 обоих каналов обнаружения соединены с вторым и четвертым входами этого блока.
В указанных технических решениях могут использоваться радиоизлучения различных источников, например таких, как широковещательные телевизионные или радиопередающие станции, радиолокационные станции, атмосферные помехи и др. (Справочник по радиолокации./Под ред. М.Сколника. Т. 4. - М.: Сов. радио, 1978, с. 213-214).
Недостатком наиболее близких технических решений является необходимость иметь разнесенные в пространстве приемные позиции.
Заявляемое изобретение направлено на устранение указанного недостатка.
Решаемой задачей является определение координат объектов, отражающих радиоизлучения источников, при однопозиционном построении системы.
Поставленная задача решается за счет совместного использования способов пассивной и активной радиолокации.
Указанный технический результат достигается тем, что в способе определения координат объектов, облучаемых источником радиоизлучений, основанном на приеме отраженных ими радиоизлучений, измерении временного сдвига между радиоизлучениями и угловых координат объектов, вычислении дальностей до объектов, согласно изобретению, дополнительно принимают прямое радиоизлучение источника, измеряют его угловые координаты, временные сдвиги между прямым и отраженными радиоизлучениями, способом активной радиолокации измеряют дальность до одного из объектов.
Указанный технический результат достигается также тем, что в радиолокационной станции, содержащей пассивный канал обнаружения, включающий последовательно соединенные антенну и приемник, а также блок вычисления координат, содержащий последовательно соединенные устройство измерения сдвига принимаемых сигналов во времени и устройство вычисления координат, причем вход устройства измерения сдвига принимаемых сигналов во времени и вход устройства вычисления координат являются первым и вторым входами блока вычисления координат соответственно, вторые входы каждого из этих устройств являются третьим и четвертым входами этого блока, при этом выход приемника пассивного канала обнаружения соединен с первым, а координатный выход антенны - с вторым входом блока вычисления координат, согласно изобретению, введены активный канал обнаружения и пятый вход блока вычисления координат, причем активный канал обнаружения включает антенну, антенный переключатель, передатчик, приемник, устройство вычисления дальности и синхронизатор, сигнальный вход/выход антенны соединен с антенным переключателем, вход которого соединен с выходом передатчика, а выход - с входом приемника, выход приемника соединен с входом устройства вычисления дальности и с третьим входом блока вычисления координат, координатный выход антенны и выход устройства вычисления дальности соединены с четвертым и пятым входами блока вычисления координат соответственно, выходы синхронизатора соединены с синхровходами устройства вычисления координат, передатчика и устройства вычисления дальности.
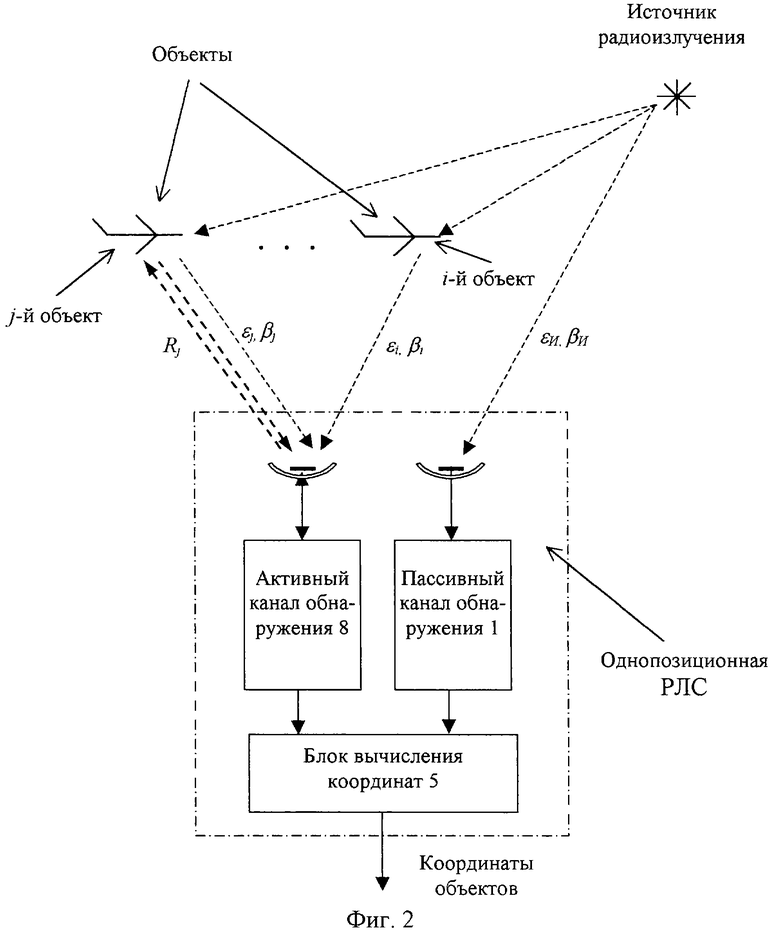
Суть предлагаемых технических решений состоит в следующем. Для определения координат объектов в зоне ответственности РЛС используют пассивный канал обнаружения 1 и активный канал обнаружения 8. Вся система размещена на одной позиции (фиг.2).
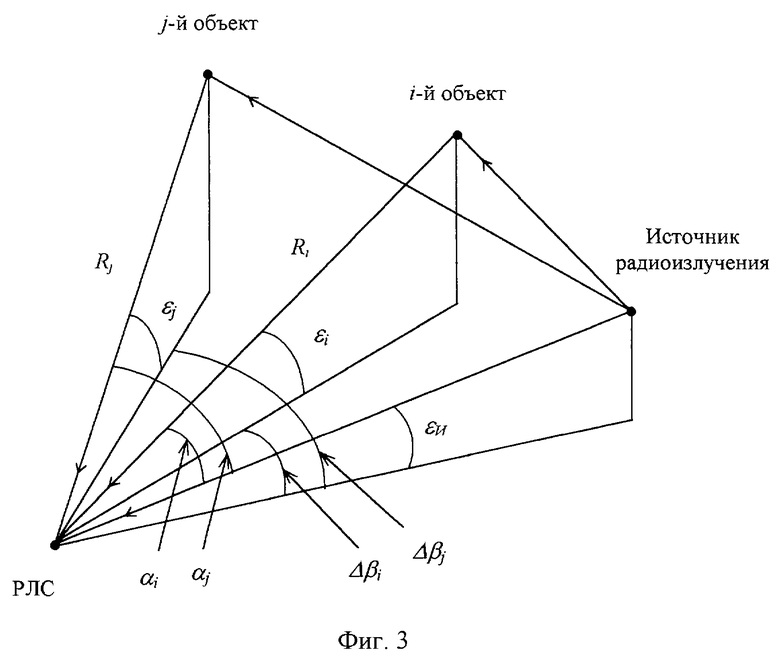
Угловые координаты i-го и j-го объектов (углы места εi, εj, азимуты βi, βj), отражающих радиоизлучения источника, измеряются по угловому положению антенны канала обнаружения 8, работающего в пассивном режиме. Антенна пассивного канала обнаружения 1 направлена на источник и принимает его прямое радиоизлучение. Можно показать (фиг.3), что дальность Ri до i-го объекта при известных координатах j-го объекта (εj, βj, Rj, j≠i), облучаемого тем же источником, и измеренных относительно прямого излучения источника временных сдвигах Δti, Δtj излучений, отраженных от объектов, определяется выражением:
Δεk=εk-εИ; Δβk=βk-βИ; k=i, j;
Δti > 0; Δtj > 0;
с – скорость света.
Измерения временных сдвигов Δti, Δtj принимаемых радиоизлучений относительно прямого излучения источника производится по положению максимумов их взаимных корреляционных функций.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - функциональная схема известного технического решения при определении координат объектов с помощью пассивной РЛС;
Фиг.2 - схема, поясняющая предлагаемый способ определения координат объектов;
Фиг.3 - геометрические пояснения вычислений координат объекта.
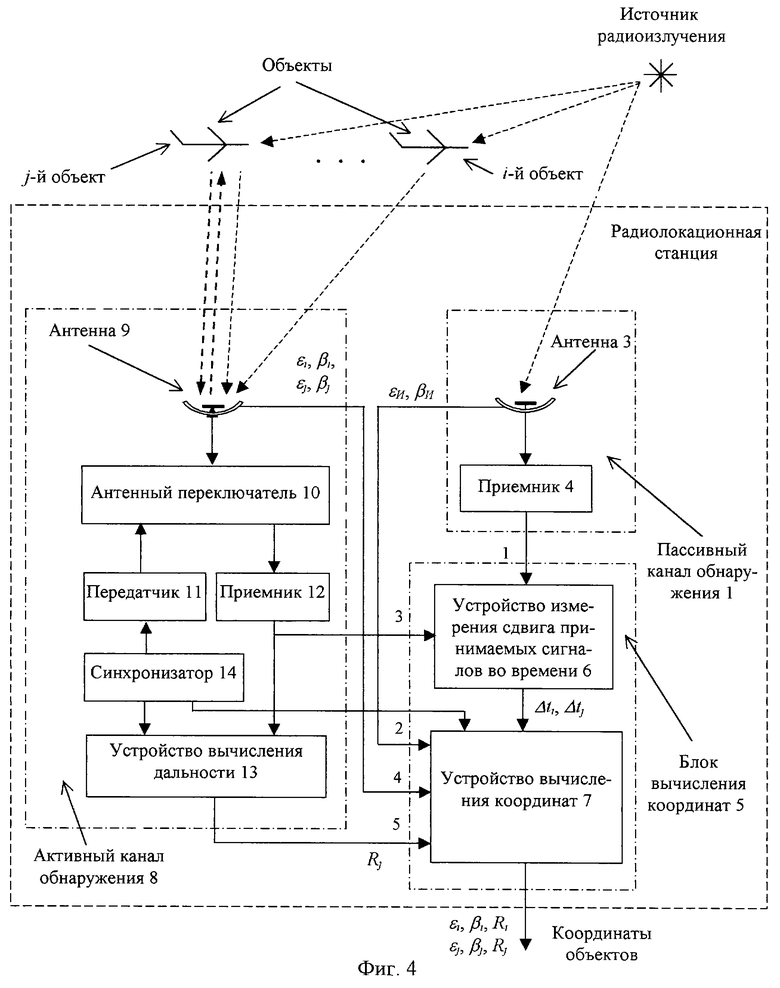
Фиг.4 - блок-схема РЛС, реализующей предлагаемый способ.
Предлагаемая РЛС (фиг.4) содержит пассивный канал обнаружения 1, включающий последовательно соединенные антенну 3 и приемник 4, а также блок вычисления координат 5, содержащий последовательно соединенные устройство измерения сдвига принимаемых сигналов во времени 6 и устройство вычисления координат 7, причем вход устройства измерения сдвига принимаемых сигналов во времени 6 и вход устройства вычисления координат 7 являются первым и вторым входами блока вычисления координат 5 соответственно, вторые входы каждого из этих устройств являются третьим и четвертым входами этого блока, при этом выход приемника 4 пассивного канала обнаружения 1 соединен с первым, а координатный выход антенны 3 - с вторым входом блока вычисления координат 5 соответственно, активный канал обнаружения 8 и пятый вход блока вычисления координат 5, причем активный канал обнаружения 8 включает антенну 9, антенный переключатель 10, передатчик 11, приемник 12, устройство вычисления дальности 13 и синхронизатор 14, сигнальный вход/выход антенны 9 соединен с антенным переключателем 10, вход которого соединен с выходом передатчика 11, а выход - с входом приемника 12, выход приемника 12 соединен третьим входом блока вычисления координат 5 и с входом устройства вычисления дальности 13, координатный выход антенны 9 и выход устройства вычисления дальности 13 соединены с четвертым и пятым входами блока вычисления координат 5 соответственно, три выхода синхронизатора 14 соединены с синхровходами устройства вычисления координат 7, передатчика 11 и устройства вычисления дальности 13.
Предлагаемая радиолокационная станция может быть выполнена с использованием следующих функциональных элементов.
Антенны 3 и 4 - ФАР с электронным сканированием по азимуту и углу места и с круговым механическим вращением по азимуту (Справочник по радиолокации./Под ред. М.Сколника. Т.2. - М.: Сов. радио, 1977, с. 132-138).
Приемники 4 и 12 - супергетеродинного типа (Справочник по основам радиолокационной техники. М., 1967, с. 343-344).
Устройство измерения сдвига принимаемых сигналов во времени 6 - многоканальный коррелятор (Теоретические основы радиолокации./Под ред. Я.Д.Ширмана. - М.: Сов. радио, 1970, с. 500).
Устройство вычисления координат 4 - цифровой вычислитель, реализующий вычисления по формуле (1).
Антенный переключатель 10 - балансный антенный переключатель на базе циркулятора (А.М.Педак и др. Справочник по основам радиолокационной техники./Под ред. В.В.Дружинина. Военное издательство, 1967, с. 166-168).
Передатчик 11 - многокаскадный импульсный передатчик на клистроне (А.М.Педак и др. Справочник по основам радиолокационной техники./Под ред. В.В.Дружинина. Военное издательство, 1967, стр. 277-278).
Устройство вычисления дальности 13 - цифровой вычислитель, реализующий вычисление дальности до объекта по величине запаздывания отраженного сигнала (Теоретические основы радиолокации./Под ред. Я.Д.Ширмана. - М.: Сов. радио, 1970, с. 221).
Для пояснения принципа работы предлагаемого устройства (фиг.4) процесс его работы можно условно разделить на три этапа: на первом этапе с помощью пассивного канала 1 в процессе обзора зоны ответственности РЛС производится обнаружение источника радиоизлучения. При этом антенна 3 выводится в его направлении. По положению антенны 3 определяются угловые координаты источника (угол места εи, азимут βи), которые с координатного выхода антенны 3 поступают на второй вход блока вычисления координат 5; на втором этапе канал обнаружения 8 работает в пассивном режиме, т.е. в зоне ответственности принимается радиоизлучение источника, отраженное от i-го объекта, и определяются угловые координаты объекта (угол места εi, азимут βi), которые с координатного выхода антенны 9 поступают на четвертый вход блока вычисления координат 5. Сигналы с выходов приемника 4 и приемника 12 поступают в устройство измерения сдвига принимаемых сигналов во времени 6, где измеряются их сдвиги во времени Δti и Δtj относительно прямого радиоизлучения источника; на третьем этапе с помощью канала обнаружения 8, работающего в активном режиме, производится измерение дальности до одного из объектов в зоне ответственности (j-й объект на фиг.4). При этом антенна 9 устанавливается в направлении с координатами εj, βj и излучается сформированный в передатчике 11 зондирующий сигнал. Отраженный от объекта сигнал принимается антенной 9, через антенный переключатель поступает в приемник 12 и затем в устройство вычисления дальности 13, где определяется дальность Rj до объекта. Измеренные таким образом угловые координаты и дальность j-го объекта подаются в устройство вычисления координат 7, где в соответствии с формулой (1) вычисляется дальность Ri до объекта, обнаруженного каналом обнаружения 8 в пассивным режиме.
Изобретение относится к радиолокации и может быть использовано в обзорных радиолокационных станциях. Решаемой задачей является определение координат объектов, отражающих радиоизлучения внешних источников, при однопозиционном построении системы. Поставленная задача решается за счет совместного использования способов пассивной и активной радиолокации. В способе определения координат объектов, облучаемых внешним источником радиоизлучений, осуществляют прием отраженных объектами радиоизлучений указанных источников, измеряют временные сдвиги между прямым и отраженными радиоизлучениями внешнего источника и угловых координат объектов, способом активной радиолокации измеряют дальность до одного из объектов, которую используют для вычисления дальностей до остальных объектов. Устройство для реализации данного способа содержит пассивный канал обнаружения, включающий антенну и приемник, активный канал обнаружения, включающий антенну, антенный переключатель, передатчик, приемник, устройство вычисления дальности и синхронизатор. Устройство содержит также блок вычисления координат, включающий устройство измерения сдвига принимаемых сигналов во времени и устройство вычисления координат. 2 c.п. ф-лы, 4 ил.
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ И РЛС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2149421C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1995 |
|
RU2096801C1 |
| US 5280294 A, 18.01.1994 | |||
| US 4746926, 24.05.1988 | |||
| СПОСОБ ПОЛУЧЕНИЯ ПРОДУКТА, ИМЕЮЩЕГО КЛЕЯЩИЕ СВОЙСТВА, ИЗ ЗЕРНОВОГО СЫРЬЯ | 1991 |
|
RU2017750C1 |
| Справочник по радиолокации./Под ред | |||
| М.СКОЛНИКА | |||
| - М.: Советское радио, 1977, т.2, с.132-135 | |||
| Теоретические основы радиолокации./Под ред | |||
| Я.Д.ШИРМАНА | |||
| - М.: Советское радио, 1970, с.221-222, 500. | |||

