Предлагаемые технические решения относятся к области радиолокации и могут быть использованы для измерения угловых координат объектов в радиолокационных станциях (РЛС) с фазированной антенной решеткой (ФАР).
Известным способом измерения угловой координаты объекта является способ, включающий излучение зондирующих сигналов, прием отраженных сигналов, сравнение амплитуд принятых сигналов с порогом, вычисление угловой координаты объекта (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана. М., Сов. радио, 1970, стр.284). Угловую координату объекта вычисляют при этом как среднее арифметическое угловых положений луча в начале и в конце пачки. Под пачкой понимается совокупность сигналов, обнаруженных в последовательных положениях луча по измеряемой угловой координате (там же).
Известным устройством для измерения угловой координаты объекта (θ0) является РЛС, содержащая (фиг.1) последовательно соединенные устройство управления, передатчик, антенный переключатель, приемник, пороговое устройство, запоминающее устройство, счетно-решающее устройство, а также антенну, вход/выход которой соединен со входом/выходом антенного переключателя, устройство управления лучом, вход которого соединен со вторым выходом устройства управления, первый выход - с управляющим входом антенны, второй выход - со вторым входом запоминающего устройства, третий выход устройства управления соединен со вторым входом счетно-решающего устройства. (Теоретические основы радиолокации. Под ред. В.Е.Дулевича. М., Сов. радио, 1978, стр.19, рис.1.5а).
В известных способе и устройстве величина сигнала определяется путем его сравнения с одним фиксированным порогом обнаружения. Поэтому положение объекта относительно диаграммы направленности антенны определяется весьма грубо, т.е. точность измерения угловой координаты объекта мала. Таким образом, недостатком известных технических решений является низкая точность измерения угловой координаты.
Наиболее близким способом измерения угловой координаты объекта (θ0) является способ (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана, М., Советское радио, 1970, стр.296-298), включающий излучение зондирующих сигналов, прием отраженных сигналов не менее чем в двух положениях луча антенны (θi, θj), разнесенных по угловой координате (i≠j), измерение амплитуд принятых сигналов (Ui, Uj), соответствующих этим положениям луча, вычисление угловой координаты объекта путем решения уравнения:

где Fi(θ0, θi, Δ) и Fj(θ0, θj, Δ) - функции, описывающие диаграмму направленности антенны при i-м и 7-м положениях луча соответственно;
Δ - ширина луча антенны по уровню половинной мощности относительно максимума луча.
В способе используется антенна, в которой ширина луча не зависит от его углового положения.
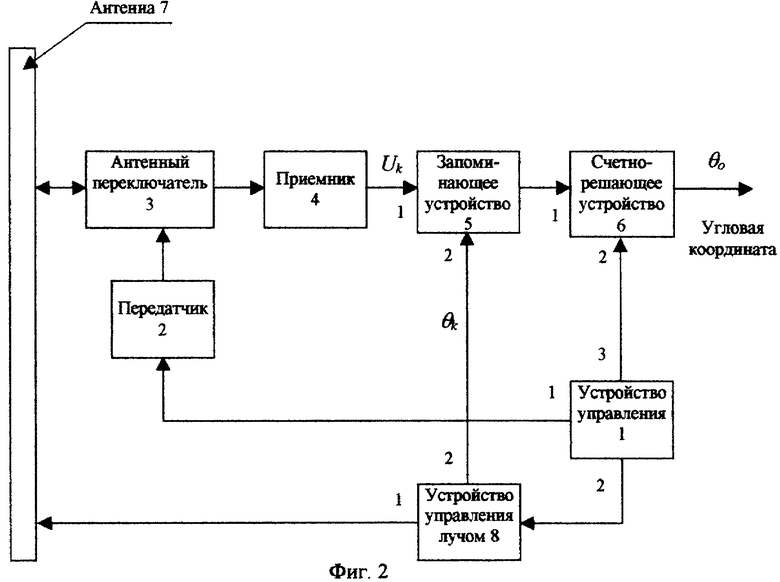
Наиболее близкой к заявляемому устройству является РЛС (фиг.2), содержащая последовательно соединенные устройство управления 1, передатчик 2, антенный переключатель 3, приемник 4, запоминающее устройство 5, счетно-решающее устройство 6, а также антенну 7, вход/выход которой соединен со входом/выходом антенного переключателя 3, устройство управления лучом 8, вход которого соединен со вторым выходом устройства управления 1, первый выход - с управляющим входом антенны 7, второй выход - со вторым входом запоминающего устройства 5, третий выход устройства управления 1 соединен со вторым входом счетно-решающего устройства 6 (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана. М, Сов. радио, 1970, стр.221, рис.5.4).
Работа наиболее близкой к заявляемой РЛС при измерении угловой координаты объекта происходит следующим образом. По команде устройства управления 1 с устройства управления лучом 8 выдается команда, по которой антенна механически устанавливается в положение, обеспечивающее излучение зондирующего сигнала в требуемом (k-м) направлении зоны обзора РЛС (k - номер углового положения луча при осмотре зоны обзора, k=1,2,...,i,j,...). Угловая координата луча θk запоминается в запоминающем устройстве 5. В передатчике 2 формируется зондирующий сигнал, который через антенный переключатель 3 поступает в антенну 7 и излучается. Отраженный от объекта сигнал принимается антенной 7 и через антенный переключатель 3 поступает в приемник 4. Амплитуда принятого сигнала Uk запоминается в запоминающем устройстве 5. По команде устройства управления 1 выбирается следующее направление зоны обзора для излучения зондирующего сигнала и операции повторяются. Таким образом, в процессе осмотра зоны обзора в запоминающем устройстве 5 записываются амплитуды отраженных от объекта сигналов вместе с соответствующими координатами луча. В счетно-решающем устройстве 6 из всех направлений луча выбираются два соседних направления (θi, θj) с наибольшими амплитудами отраженных сигналов и в соответствии с формулой (1) вычисляется угловая координата объекта.
Известно, что в плоской ФАР при отклонении от нормали луч расширяется (Справочник по радиолокации. Ред. М.Сколник. М., Сов. радио, 1977, т.2, с.133). Кроме того, в РЛС с ФАР, как правило, используется программный обзор, при котором ширина луча на определенных участках зоны намеренно (далее - "программно") изменяется. Таким образом, в РЛС с ФАР ширина луча является переменной. В наиболее близких технических решениях перемещение луча осуществляется механическим перемещением антенны, поэтому ширина луча Δ не зависит от углового положения луча. В связи с этим в РЛС с ФАР наиболее близкий способ приводит к ухудшению точности измерения угловой координаты объекта.
Таким образом, недостатком наиболее близких технических решений является низкая точность измерения угловой координаты объекта.
Решаемой задачей (техническим результатом) является повышение точности измерения угловой координаты объекта.
Поставленная задача решается тем, что в способе измерения угловой координаты объекта, включающем излучение зондирующих сигналов, прием отраженных сигналов не менее чем при двух положениях луча антенны, разнесенных по угловой координате, измерение амплитуд принятых сигналов, соответствующих этим положениям луча, вычисление угловой координаты объекта, согласно изобретению при каждом угловом положении луча дополнительно определяют отклонение луча от нормали антенны и на основании этого определяют его ширину, после чего вычисляют угловую координату объекта.
Поставленная задача решается также тем, что угловую координату вычисляют в соответствии с формулами:

 ,
,
где θ0 - измеряемая угловая координата объекта;
θi, θj - угловые координаты луча при i-м и j-м (i≠j) его положениях соответственно;
Ui, Uj - амплитуды принятого сигнала при i-м и j-м положениях луча соответственно;
Δi=Δн/cos(θiэ)+Δin, Δj=Δн/cos(θjэ)+Δjn - ширина луча при i-м и j-м его положениях соответственно;
θiэ, θjэ - измеренное отклонение луча от нормали антенны при электронном сканировании при i-м и j-м его положениях соответственно;
Δin, Δjn - программное изменение ширины луча при i-м и j-м его положениях соответственно;
Δн - ширина луча при его положении на нормали антенны.
Поставленная задача решается также тем, что в радиолокационную станцию, содержащую последовательно соединенные устройство управления, передатчик, антенный переключатель, приемник, запоминающее устройство, счетно-решающее устройство, а также антенну, вход/выход которой соединен со входом/выходом антенного переключателя, устройство управления лучом, вход которого соединен со вторым выходом устройства управления, первый выход - с управляющим входом антенны, второй выход - со вторым входом запоминающего устройства, третий выход устройства управления соединен со вторым входом счетно-решающего устройства, согласно изобретению введено устройство определения ширины луча, первый и второй входы которого соединены соответственно со вторым и третьим выходами устройства управления лучом, а выход соединен с третьим входом запоминающего устройства.
Поясним сущность предлагаемого технического решения.
В антеннах без электронного сканирования, как уже отмечалось, угловое положение луча полностью определяется положением антенны. При этом ширина луча не зависит от углового положения луча.
В плоской ФАР с электронным сканированием угловое положение луча θk определяется угловым положением нормали ФАР θkн, которое устанавливается механическим перемещением ФАР, и отклонением луча от нормали антенны за счет электронного сканирования θkэ.
Известно, что в плоской ФАР при отклонении луча от нормали антенны луч расширяется. Так, если ширина луча при его положении на нормали равна Δн, то при отклонении от нормали на угол θkэ ширина луча определяется в соответствии с формулой (Справочник по радиолокации. Ред. М.Сколник. М., Сов. радио, 1977, т.2, с.133).

Кроме того, в РЛС с программным обзором для обеспечения требуемой зоны обзора ширина луча намеренно (программно) изменяется. При этом появляется дополнительное (программное) приращение ширины луча Δkn и ширина луча равна:

Таким образом, в РЛС с ФАР ширина луча при любых двух отличающихся по угловой координате положениях луча (k=i и k=j), как правило, различна. При этом равносигнальное направление антенной системы (в моноимпульсной РЛС) или равносигнальное направление при двух угловых положениях луча (в одноканальной РЛС) оказывается смещенным от середины углового расстояния между этими положениями луча.
В изобретениях учитывается указанное смещение равносигнального направления и за счет этого увеличивается точность измерения угловой координаты. Для этого для каждой пары измерений амплитуды сигнала (i-го и j-го) производится определение отклонения луча от нормали антенны (θiэ, θjэ) и с учетом программного изменения ширины луча (Δin, Δjn) в соответствии с формулой (4) определяются (полагая k=i и k=j) значения ширины луча Δi, Δj. После чего вычисляется угловая координата объекта θ0.
Угловая координата объекта θ0 в общем случае вычисляется путем решения уравнения:

которое следует из (1) путем замены функций, описывающих диаграмму направленности антенны в двух положениях луча Fi(θ0, θi, Δ) и Fj(θ0, θj, Δ) при одинаковой его ширине Δ, на функции Fi(θ0, θi, Δi) и Fj(θ0, θj, Δj), описывающие диаграмму направленности антенны в двух положениях луча при отличающихся Δi и Δj.
Способы решения уравнений вида (5) известны (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана. М., Сов. радио, 1970, стр.276-282). Однако определение угловой координаты в соответствии с ними требует значительных вычислительных и временных ресурсов, которые в некоторых случаях, например, в мобильных РЛС, могут отсутствовать. Поэтому в изобретении предложен другой вариант, не требующий значительных вычислительных и временных ресурсов - в соответствии с формулами (2). Он основан на том известном факте, что нормированные к своему максимальному значению диаграммы направленности практически всех реальных видов в области главного луча (если применяется спадающее к краям раскрыва антенны амплитудное распределение поля, что обычно имеет место) с высокой точностью описываются гауссовой кривой (Раков В.И. Индикаторные устройства радиолокационных станций. Л. Судпромгиз, 1962, с.24-29):

Если используются отраженные сигналы более чем из двух положений луча антенны, то для получения однозначного измерения при вычислении в (2) выбираются два соседних положения луча (θi, θj) с наибольшими амплитудами отраженных сигналов.
Заявляемый способ может быть применен и для измерения обеих угловых координат объекта. В этом случае указанные действия производятся независимо по каждой угловой координате.
Заявляемый способ может быть реализован как в одноканальной РЛС, где измерения осуществляются последовательно во времени, так и в многоканальной (двухканальной - моноимпульсной) РЛС, где прием сигналов осуществляется одновременно несколькими (двумя) каналами, лучи которых смещены по угловой координате.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - блок-схема известной РЛС.
Фиг.2 - блок-схема наиболее близкой к заявляемой РЛС.
Фиг.3 - блок-схема заявляемой РЛС.
Фиг.4 - блок-схема устройства управления 1.
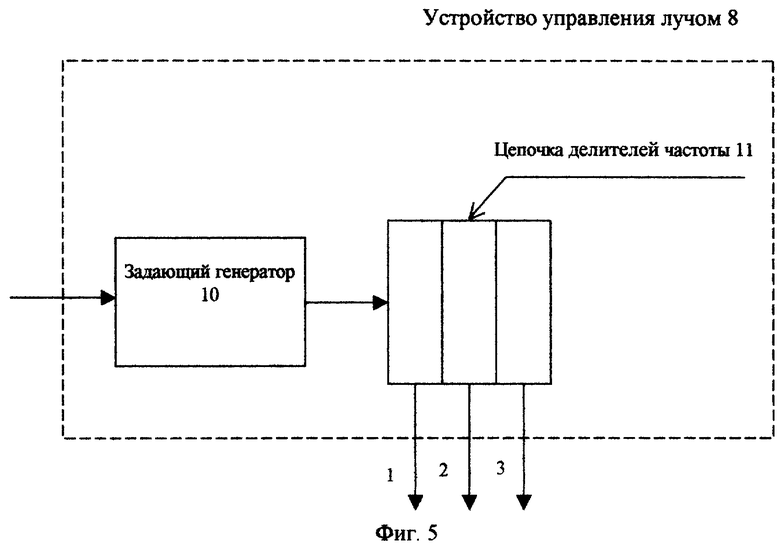
Фиг.5 - блок-схема устройства управления лучом 8.
Заявляемый способ измерения угловых координат объекта реализуется радиолокационной станцией (фиг.3), которая содержит последовательно соединенные устройство управления 1, передатчик 2, антенный переключатель 3, приемник 4, запоминающее устройство 5, счетно-решающее устройство 6, а также антенну 7, вход/выход которой соединен со входом/выходом антенного переключателя 3, устройство управления лучом 8, вход которого соединен со вторым выходом устройства управления 1, первый выход - с управляющим входом антенны 7, второй выход - со вторым входом запоминающего устройства 5, устройство определения ширины луча 9, при этом третий выход устройства управления 1 соединен со вторым входом счетно-решающего устройства 6, первый и второй входы устройства определения ширины луча 9 соединены соответственно со вторым и третьим выходами устройства управления лучом 8, выход его соединен с третьим входом запоминающего устройства 5.
Заявляемая радиолокационная станция может быть выполнена с использованием следующих функциональных элементов.
Устройство управления 1 (фиг.4) и устройство управления лучом 8 (фиг.5) выполнены на основе задающего генератора 10 и последовательно соединенной с ним цепочки делителей частоты 11. В качестве задающего генератора может быть использован генератор с самовозбуждением и кварцевой стабилизацией. В качестве делителей частоты могут использоваться блокинг-генераторы, работающие в режиме деления (Радиолокационные устройства (теория и принципы построения). Под ред. В.В.Григорина-Рябова, стр.602-603),
Передатчик 2 - импульсного типа (Справочник по основам радиолокационной техники. М., 1967, с.278).
Антенный переключатель 3 - выполнен на циркуляторе или волноводном мосте (Справочник по основам радиолокационной техники. М., 1967, стр.146-147).
Приемник 4 - супергетеродинного типа (Справочник по основам радиолокационной техники. М., 1967, стр.343-344).
Запоминающее устройство 5 - Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина, М., Радио и связь, 1984.
Счетно-решающее устройство 6 - цифровой вычислитель, осуществляющий вычисления по формулам (2).
Антенна 7 - фазированная антенная решетка с электронным сканированием по одной или обеим угловым координатам и с круговым механическим вращением (Справочник по радиолокации. Под ред. М.Сколника. М., Сов. радио, 1977, т.2, стр.132-138).
Устройство определения ширины луча 9 - цифровой вычислитель, осуществляющий вычисления в соответствии с формулой (4).
Работа заявляемой РЛС при измерении угловой координаты объекта происходит следующим образом. По команде устройства управления 1 устройство управления лучом 8 выдает сигналы в антенну 7, по которым полотно ФАР и фазовращатели ФАР устанавливаются таким образом, чтобы обеспечить излучение зондирующего сигнала в требуемом (k-м, k=1,2,...,i,j,...) направлении зоны обзора РЛС. Сигнал, пропорциональный угловой координате луча θk со второго выхода устройства управления лучом 8 подается в запоминающее устройство 5 и хранится там. Этот же сигнал и сигнал, пропорциональный соответствующей угловой координате нормали антенны θkн, с третьего выхода устройства управления лучом 8 поступают на первый и второй входы устройства определения ширины луча 9 соответственно, где производится определение отклонения луча от нормали антенны θkэ и с учетом программных изменений ширины луча Δkn - определение ширины луча антенны Δk (в соответствии с (4)). Сигнал с выхода устройства 9, пропорциональный значению ширины луча Δk, подается на третий вход запоминающего устройства 5 и хранится там. В передатчике 2 формируется зондирующий сигнал, который через антенный переключатель 3 поступает в антенну 7 и излучается. Отраженный от объекта сигнал принимается антенной 7 и через антенный переключатель 3 поступает в приемник 4 и далее - в запоминающее устройство 5, где его амплитуда Uk запоминается. По команде устройства управления 1 выбирается следующее направление зоны обзора для излучения зондирующего сигнала и операции повторяются. Таким образом, в процессе осмотра зоны обзора в запоминающем устройстве 5 записываются амплитуды отраженных сигналов и соответствующие им угловые положения луча и величины ширины луча. В счетно-решающем устройстве 6 из всех направлений луча выбираются два соседних направления (θi, θj) с наибольшими амплитудами отраженных сигналов и в соответствии с формулами (2) вычисляется угловая координата объекта.
Таким образом, заявляемые технические решения позволяют увеличить точность измерения угловой координаты объекта, т.е. обеспечивают достижение заявляемого технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ КООРДИНАТЫ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2317567C1 |
| СПОСОБ ЦИФРОВОГО ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ ЛИНЕЙНОЙ ФАР ПРИ ИЗЛУЧЕНИИ ЛЧМ СИГНАЛА | 2011 |
|
RU2533160C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309427C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛИ | 2015 |
|
RU2581898C1 |
| Способ построения радиолокационной станции | 2019 |
|
RU2723299C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2358281C1 |
| СПОСОБ ЗАЩИТЫ ОБЗОРНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ ОТ ПОМЕХ (ВАРИАНТЫ) | 2015 |
|
RU2583850C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ | 1995 |
|
RU2099738C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА В ПРОЦЕССЕ ЗАХВАТА И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ В СТРОБАХ | 2006 |
|
RU2306580C1 |
| Способ измерения угловых координат цели | 2016 |
|
RU2649880C1 |


Предлагаемые технические решения относятся к области радиолокации и могут быть использованы для измерения угловых координат объектов в радиолокационных станциях с фазированной антенной решеткой. Достигаемым техническим результатом является повышение точности измерения угловой координаты объекта. Технический результат достигается тем, что в способе и в устройстве при измерении угловой координаты объекта, включающем излучение зондирующих сигналов, прием отраженных сигналов не менее чем при двух положениях луча антенны, разнесенных по угловой координате, измерение амплитуд принятых сигналов, соответствующих этим положениям луча, вычисление угловой координаты объекта, при каждом угловом положении луча дополнительно определяют отклонение луча от нормали антенны и на основании этого определяют его ширину, после чего вычисляют угловую координату объекта. 2 н. и 1 з.п. ф-лы, 5 ил.
Δi=Δн/cos(θiэ)+Δin, Δj=Δн/cos(θjэ)+Δjn,
где Δi, Δj - ширина луча при i-м и j-м (i≠j) его положениях соответственно;
θiэ, θjэ - измеренное отклонение луча от нормали антенны при электронном сканировании при i-м и j-м его положениях соответственно;
Δin, Δjn - программное изменение ширины луча при i-м и j-м его положениях соответственно;
Δн - ширина луча при его положении на нормали антенны, после чего вычисляют угловую координату объекта.
 , при Δi≠Δj;
, при Δi≠Δj;
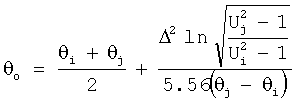 , при Δi=Δj=Δ,
, при Δi=Δj=Δ,
где θo - измеряемая угловая координата объекта;
θi, θj - угловые координаты луча при i-м и j-м (i≠j) его положениях соответственно;
Ui, Uj - амплитуды принятого сигнала при i-м и j-м положениях луча соответственно.
| Теоретические основы радиолокации | |||
| /Под ред | |||
| Я.Д.ШИРМАНА | |||
| - М.: Советское радио, 1970, с.221, рис.5.4 | |||
| СПОСОБ ФОРМИРОВАНИЯ И УСТРОЙСТВО МАЛОГАБАРИТНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ РЛС С УПРАВЛЯЕМОЙ ПО ШИРИНЕ ДИАГРАММОЙ НАПРАВЛЕННОСТИ | 2000 |
|
RU2183891C2 |
| СПОСОБ КОНТРОЛЯ ДИАГРАММНЫХ ПАРАМЕТРОВ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ РАДИОПЕЛЕНГАТОРА | 1996 |
|
RU2117308C1 |
| УГЛОВОЙ СЕЛЕКТОР ДЛЯ РЛС С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ | 1997 |
|
RU2160906C2 |
| ЕР 0880196 A1, 25.11.1998 | |||
| US 5166689 A, 24.11.1992 | |||
| DE 3943459 A1, 24.06.1993. | |||

