Изобретение относится к области радиолокации и может быть использовано в перспективных РЛС для управления воздушным движением и для контроля воздушного пространства.
Необходимым условием обеспечения этого управления и контроля является знание координат всех объектов, находящихся в контролируемом пространстве, с точностью 20-40' по углам и 20-30 м по дальности, а также способность разрешать объекты, разнесенные относительно РЛС на 1-2o.
Кроме того, измеренные координаты при первичном обнаружении должны уточняться в процессе движения, т.е. объекты должны сопровождаться.
Таким образом, процесс контроля воздушного пространства заключается как в обнаружении объекта, так и в сопровождении при его пролете через контролируемую зону, имеющую обычно угловой размер ΔB 360o по азимуту и ΔE 30o по углу места.
Классический способ выполнения этих функций основан на регулярном последовательном обзоре заданного пространства с помощью РЛС, имеющей игольчатую форму диаграммы направленности антенны (ДНА). Требуемая точность по дальности при этом обеспечивается за счет применения широкополосных сигналов (Справочник по радиолокации под ред. М.Сколника, М. Сов. радио, т. 1, 1976, с. 16). А разрешающая способность по угловым координатам обеспечивается за счет применения антенны соответствующих размеров, поскольку разрешение определяется шириной луча ДНА, которая в свою очередь пропорциональна  (λ длина волны РЛС, D линейный размер апертуры антенны). Для получения разрешающей способности 1-2o применяют антенны с шириной ДНА 1-2o. Реализовать такую ДНА с приемлемыми размерами апертуры антенны можно в коротковолновом S-диапазоне (частота 2000-4000 МГц) (см. там же).
(λ длина волны РЛС, D линейный размер апертуры антенны). Для получения разрешающей способности 1-2o применяют антенны с шириной ДНА 1-2o. Реализовать такую ДНА с приемлемыми размерами апертуры антенны можно в коротковолновом S-диапазоне (частота 2000-4000 МГц) (см. там же).
Высокую же точность измерения угловых координат при этом обеспечивают за счет обработки информации, содержащейся в отраженных сигналах, принимаемых при разных направлениях ДНА относительно объекта. Чаще всего применяют одноканальный метод весовой обработки пакета отраженных импульсов (Теоретические основы радиолокации, под ред. Я.Д.Ширмана, Сов.радио, М. 1970, с. 276), разновидностью которого является метод определения центра пакета. Суть метода в том, что отраженные от объекта сигналы, принятые при зондировании K соседних направлений вокруг него, объединяют в единый радиолокационный пакет, а затем определяют угловую координату объекта как среднее арифметическое значение координат оси антенны, соответствующих началу и концу пачки.
Суть этого метода поясняется фиг. 1 2. На фиг. 1 показано положение лучей РЛС при зондировании К направлений, q1, ... θк вокруг направления θ0 на объект (точка О). На фиг. 2 показано положение лучей антенны, соответствующих началу пакета θ1 и концу θк, которые определяются уровнем коэффициента усиления антенны КУо в направлении θ0 на объект, при котором уровень принимаемого отраженного от объекта сигнала равен порогу обнаружения. При этом
Таким образом, точность измерения θ0 будет определяться точностью определения θ1 и θк, что, в свою очередь, при достаточно больших отношениях сигнал/шум определяется, в основном, дискретностью укладки лучей вокруг направления на объект Δθ = θi-θi-1 при i=2-K. При этом среднеквадратичная ошибка измерения угловой координаты
σθ≈ Δθ (1)
(С.З.Кузьмин. Основы проектирования систем цифровой обработки радиолокационной информации, М. Радио и связь, 1986, с. 99-100, рис. 2.19).
Как правило, регулярный обзор пространства осуществляют с меньшей плотностью укладки лучей, т.е. с большим значением дискреты укладки, чем Dq, но в каждом периоде прохода луча антенны направления на объект уплотняют их укладку. Для того чтобы минимизировать объем пространства, в котором требуется более плотная укладка, определяют наиболее вероятное положение объекта к следующему периоду прохода луча антенны путем экстраполяции координат объекта, определяя экстраполяционную точку его положения (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации, 1974). Вокруг экстраполяционной точки устанавливают экстраполяционный строб, в котором и уплотняют укладку лучей (см. фиг. 2).
Можно показать, что размер экстраполяционного строба по азимуту Dq стр для неманеврирующего объекта определяется выражением (см. там же)
где K коэффициент, определяемый видом алгоритма экстраполяции.
Для наиболее распространенного алгоритма в установившемся режиме автосопровождения: К=0,75 (см. там же, с.388), тогда
Dqстр≈ 5σθ (2)
и число направлений зондирования с учетом (1).
Таким образом, известный способ обнаружения и сопровождения объектов с требуемыми точностями и разрешающей способностью основан на регулярном обзоре заданного пространства РЛС не ниже S-диапазона при зондировании K >> 1 направлений в стробе вокруг направления на объект, выставляемом на основе экстраполяции координат при его сопровождении.
Работа всех наиболее распространенных современных РЛС основана на этом способе. В качестве примера РЛС S-диапазона может служить RAT-31S (Радиоэлектроника за рубежом, N 17, 1980, с. 23), используемая в системах УВД и ПВО. Эта РЛС имеет параметры: l 10 см, размер антенны 4 x 4 м, ширина луча в горизонтальной плоскости 1,5o, в вертикальной 1,5-3o, обзор пространства по азимуту обеспечивается механическим вращением ФАР со скоростью 6 или 10 об/мин.
При использовании описанного способа сопровождения процессы обзора пространства и получения пакета сигналов с К направлений, в основном, совмещаются, поэтому дополнительный расход энергии для получения точного значения угловой координаты определяется только степенью уплотнения лучей в экстраполяционном стробе.
Уровень возможного расхода энергии РЛС RAT-31S позволяет обнаруживать воздушные объекты с эффективной площадью рассеяния (ЭПР) s 3 м2 на дальности 100 км и вести сопровождение по мере их приближения.
Затраты энергии РЛС коротковолнового диапазона S (РЛСк) на один период обзора Tо можно оценить выражением:
Эок=Э1к•F•Tо (4)
где Э1к затраты энергии РЛСк на одно зондирование;
F частота зондирования;
Tо период обзора пространства.
Недостаток способа обнаружения и сопровождения объектов в коротковолновом, например, S-диапазоне состоит в необходимости излучения сравнительно большого количества ВЧ-энергии, что приводит к большим затратам энергетических ресурсов и к ухудшению экологической обстановки в зоне расположения РЛС. Особенно этот недостаток проявляется при решении задачи обнаружения и сопровождения малозаметных объектов, под которыми имеются в виду как летательные аппараты с малыми линейными размерами, т.е. с малой ЭПР, так и объекты, созданные по технологии, обеспечивающей их слабую радиозаметность, например, по технологии Stealth (Interavia, 1987, IV, p.331-333), что эквивалентно также малой ЭПР. Так, если ЭПР малозаметного объекта составляет, например, величину 0,1 м2, то для его обнаружения на дальности 100 км необходимо увеличить затраты энергии RAT-31S в 30 раз.
Известен способ обнаружения и сопровождения на основе собственных излучений радиоэлектронных средств объекта в коротковолновом, например, S-диапазоне (Теоретические основы радиолокации, под ред. Я.Д.Ширмана, Сов.радио, М. 1970, с. 494). Поскольку дальность до источника излучения не может быть определена по данным приема только в одном пункте, то для определения всех координат одного объекта требуется комплекс не менее чем из двух РЛС, а если объектов несколько, то возникает неоднозначность в измерении, для устранения которой требуется большее их число.
На фиг.3 дано пояснение сути триангуляционного способа (см. там же) определения координат излучающего объекта в горизонтальной плоскости для случая, когда высота полета объекта (точка О) H << r1, r2 (r1, r2 дальность от РЛС1, РЛС2 до объекта), т.е. что объект находится по отношению к РЛС1 и РЛС2 под нулевым углом места e1≈ ε2≈ 0. С помощью РЛС1 и РЛС2 измеряют угловые направления θ1 и θ2 приема излучений объекта из точки О. Дальность до объекта вычисляется из соотношений:
где Б расстояние между РЛС1 и РЛС2.
Недостаток этого способа в том, что объекты нерегулярно излучают сигналы, а некоторые вообще могут их не излучать.
Наиболее близким техническим решением является способ обнаружения и сопровождения объектов, основанный на оборе пространства длинноволновой РЛС (РЛС0) и передаче информации о координатах объектов коротковолновой РЛСк, которая после обнаружения по этим данным объекта осуществляет его сопровождение (Interavia, 1987, IV, p. 331-333). Эффективность способа основана на том, что современные летательные аппараты (ЛА) имеют в длинноволновом диапазоне ЭПР значительно выше, чем в коротковолновом диапазоне. Так, например, в УВЧ-диапазоне ЭПР в 7 раз выше, чем в S-диапазоне, а для перспективных ЛА эта разница составит 100 раз (БИНТИ N 46 (2291), ТАСС 12.11.86).
В статье Effect of Radar Frequency on the Detection of Shaped (LowRCS) Targets D.Moraitis, S.Alland, IEEE, 1985, Radar-85 p.p. 159-162.
показано, что ЭПР многих радиолокационных объектов может быть представлена зависимостью:
σ ~ λn,
где σ ЭПР объекта,
l длина волны РЛС,
n фактор формы объекта.
Для форм объекта с низкой ЭПР n=2. Там же показано, что дальность обнаружения малозаметных объектов длинноволновыми РЛС увеличивается в 1,75 раза по сравнению с РЛС S-диапазона и в 2,2 раза по сравнению с РЛС более коротковолнового C-диапазона. Это означает, что при прочих равных условиях для зондирования одного направления затраты энергии длинноволновой РЛСд с длиной волны lд могут быть уменьшены по сравнению с затратами РЛСк с длиной волны или с учетом (4):
или с учетом (4):
где Эод- затраты энергии длинноволновой РЛСд на один период обзора заданного пространства.
Но как уже отмечалось, для получения требуемого разрешения объектов по угловым координатам необходимо использовать, как минимум, S-диапазон. Поэтому в способе-прототипе предусмотрено, что после обнаружения объекта длинноволновой РЛСд данные о его координатах передаются коротковолновой РЛСк, которая после обнаружения по этим данным ведет его сопровождение точно так же, как и в способе-аналоге, т.е. путем зондирования К направлений в экстраполяционном стробе.
Экономия затрат энергии на обнаружение РЛСк S-диапазона в способе-прототипе по сравнению с аналогом происходит за счет того, что вместо регулярного обзора всего пространства, в процессе которого происходит излучение энергии в объеме ΔB×ΔE, осуществляют излучение энергии только в направлениях, в которых длинноволновая РЛСд обнаружила объекты, обеспечивая при этом высокую разрешающую способность и точность измерения координат, достигаемую автономной работой РЛСк.
Объем пространства, где требуется излучение энергии РЛСк, составит величину:
nТо•Δθд•Δεд≪ ΔB•ΔE (6)
где nТо число новых объектов, обнаруженных РЛСд на период обзора пространства Tо;
Δθд•Δεд размеры зоны поиска объекта РЛСк по азимуту и углу места на основе данных РЛСд, определяемые выражением:
Δθд≈ ± 2σθд; Δεд≈ ±2σεд.
где σθд,σεд = среднеквадратичные ошибки измерения азимута и угла места РЛСд.
Таким образом, затраты энергии РЛСк на первичное обнаружение объекта за время То (до начала его сопровождения) в соответствии с (6) составят величину
где Э
После обнаружения объекта с помощью РЛСк определяют более точные его угловые координаты и ведут его сопровождение, как показано выше, путем зондирования K >> 1 направлений в экстраполяционном стробе. Поскольку надобность в регулярном обзоре с помощью РЛСк при этом способе отпадает, то зондирование K направлений с помощью РЛСк осуществляется только в интересах получения требуемой точности измерения угловых координат. Затраты энергии за один период обзора на сопровождение N объектов составят величину
где Э
Тогда общие затраты энергии за время To комплекса РЛСд + РЛСк в способе-прототипе на обнаружение и сопровождение объектов с учетом (5), (7) и (8) будут равны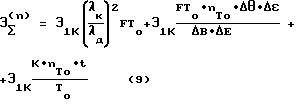
Выигрыш в общих затратах энергии на обнаружение и сопровождение объектов способа-прототипа W(п) в соответствии с (4) и (9) составит величину: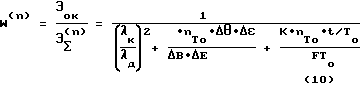
Для реальных значений, с учетом (3):
выигрыш составит величину
W(п) ≈ 3,7
Анализируя (10) можно сделать вывод, что выигрыш для реальных значений параметров (11) ограничивается величиной затрат РЛСк и, в первую очередь, на сопровождение объектов.
Действительно, в соответствии с (4), (7) и (8) затраты РЛСк на сопровождение объектов превосходят ее же затраты на первичное их обнаружение за один период обзора:
Для значений (11), независимо от nТо
Недостаток способа-прототипа обнаружения и сопровождения объектов состоит в сравнительно больших затратах энергии коротковолновой РЛС на сопровождение.
Заявляемое изобретение направлено на решение следующей задачи: сокращение затрат энергии коротковолновой РЛСк на сопровождение объекта.
Эта задача решается путем увеличения точности измерения угловой координаты объекта при приеме сигнала РЛС с одиночного направления. Указанный результат достигается тем, что в известном способе радиолокационного обнаружения и сопровождения объектов, заключающемся в обзоре пространства длинноволновой РЛС и передаче информации о координатах объектов коротковолновой, согласно изобретению точные координаты определяют на основе совместного измерения дальности до объектов разнесенными в пространстве коротковолновой и длинноволновой РЛС.
Таким образом, суть изобретения состоит в следующем. С помощью длинноволновой РЛСд осуществляют обзор пространства, обнаруживают объект, измеряют до него дальность rд и угловую координату  и эти данные передают коротковолновой РЛСк, отстоящей от РЛСд на расстояние Б; с помощью РЛСк осматривают участок пространства размером, определяемым значениями Δθд и θд, обнаруживают объект, измеряют до него дальность rк; на основе данных rд, rк и Б из соотношений треугольника вычисляют более точное значение угловой координаты объекта, сопровождают в процессе его полета с помощью обеих РДС, определяя текущее значение rдt и rкt, вычисляют угловую координату, определяют параметры экстраполяционного способа.
и эти данные передают коротковолновой РЛСк, отстоящей от РЛСд на расстояние Б; с помощью РЛСк осматривают участок пространства размером, определяемым значениями Δθд и θд, обнаруживают объект, измеряют до него дальность rк; на основе данных rд, rк и Б из соотношений треугольника вычисляют более точное значение угловой координаты объекта, сопровождают в процессе его полета с помощью обеих РДС, определяя текущее значение rдt и rкt, вычисляют угловую координату, определяют параметры экстраполяционного способа.
Суть изобретения поясняется на фиг. 4 для наиболее распространенного случая, когда высота полета объекта H << rд, rк и в процессе полета H const. С помощью РЛСд в момент времени ti обнаруживают объект (точка 0), измеряют координаты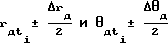
Таким образом, с помощью РДСд определяют, что объект находится в четырехугольнике abcd.
С помощью РЛСк просматривают пространство, ограниченное этим четырехугольником, в момент времени ti + Δt, обнаруживают объект и измеряют дальность до него rк(ti+Δt) При этом либо обеспечивают Δt ≈ 0,, либо экстраполируют  и получают rд(ti+Δt) используя значение радиальной по отношению к РЛСд скорости Vд, определяемой из выражения:
и получают rд(ti+Δt) используя значение радиальной по отношению к РЛСд скорости Vд, определяемой из выражения: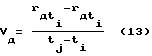
Поэтому в дальнейшем считаем, что rд и rк получают в один момент времени ti.
По данным  и
и  на основе соотношений треугольника определяют угол
на основе соотношений треугольника определяют угол 
Радиальную скорость Vк по отношению к РЛСк определяют аналогично (13). По полученным данным, как в известном способе, определяют параметры экстраполяционного строба, в следующем периоде обзора просматривают его с помощью РЛСд и РЛСк, причем с помощью РЛСк зондируют направления этого строба только до получения первого сигнала (вместо зондирования К направлений вокруг объекта), поскольку точность измерения угла  определяется точностью измерения
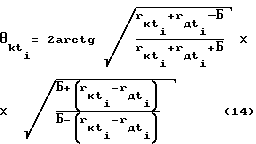
определяется точностью измерения  , а не плотностью укладки лучей в экстраполяционном стробе, как в способе-прототипе. Размер этого строба также определяется выражением (2), а входящее в это выражение σθ, для предлагаемого способа может быть найдено из (14):
, а не плотностью укладки лучей в экстраполяционном стробе, как в способе-прототипе. Размер этого строба также определяется выражением (2), а входящее в это выражение σθ, для предлагаемого способа может быть найдено из (14):
где  среднеквадратичная ошибка измерения угла θk для предлагаемого способа (разнесенные РЛСк и РЛСд);
среднеквадратичная ошибка измерения угла θk для предлагаемого способа (разнесенные РЛСк и РЛСд); среднеквадратичная ошибка измерения дальности соответственно rд и rк, определяемая выражением:
среднеквадратичная ошибка измерения дальности соответственно rд и rк, определяемая выражением:
где σt среднеквадратичная ошибка измерения времени запаздывания отраженного сигнала;
C скорость распространения э-м энергии.
Для сигнала с прямоугольным спектром выражение для σt имеет вид (Теоретические основы радиолокации, под ред. Я.Д.Ширмана, м. Сов. радио, 1970, с. 191):
где q отношение сигнал/шум;
Δf ширина спектра сигнала.
Практически
(rk-rд)2<<Б2 и r
Это соотношение имеет место, например, при использовании комплекса РЛСк и РЛСд для трассовой локации гражданской авиации с базой, перпендикулярной основному направлению движения самолетов.
Из (15) и (16) получим
Из (2) и (17) получим размер экстраполяционного строба для предлагаемого способа с разносом РЛС:
Поскольку для измерения угловой координаты достаточно получения сигнала с одного направления, то путем выбора Б при достигаемых значениях  желательно получить величину Δθ
желательно получить величину Δθ
Для РЛС РАТ-31S нужно получить  ≅1,5oC 0,026 рад, тогда для реально достигаемых значений q•Δf 24•106 при
≅1,5oC 0,026 рад, тогда для реально достигаемых значений q•Δf 24•106 при  из (16) и (18) получим базы Б, при которой для сопровождения объекта достаточно зондировать с помощью РЛСк одно направление (К(р)=1):
из (16) и (18) получим базы Б, при которой для сопровождения объекта достаточно зондировать с помощью РЛСк одно направление (К(р)=1):
Б ≥ 800 м
Таким образом, использование предлагаемого способа вместо способа-прототипа позволяет сократить затраты энергии РЛСк на сопровождение объекта для параметров, определяемых (11), в 6 раз.
Изобретение относится к области радиолокации и может быть использовано в перспективных РЛС для управления воздушным движением и для контроля воздушного пространства. В основу изобретения положена задача сокращения затрат энергии коротковолновой РЛС на сопровождение объекта. Эта задача решается путем увеличения точности измерения угловой координаты объекта при приеме сигнала РЛС с одиночного направления. Указанный результат достигается тем, что в известном способе радиолокационного обнаружения и сопровождения объектов, заключающемся в обзоре пространства длинноволновой РЛС и передаче информации о координатах объектов коротковолновой РСЛ, согласно изобретению точные координаты определяют на основе совместного измерения дальностей до объектов разнесенными в пространстве коротковолновой и длинноволновой РЛС. 4 ил.
Способ радиолокационного обнаружения и сопровождения объектов, заключающийся в обзоре пространства длинноволновой РЛС и передаче информации о дальности до объекта и его угловой координаты коротковолновой РЛС, в обнаружении этой РЛС по этим данным объекта и измерении дальности до него, в определеннии более точных угловых координат, отличающийся тем, что сопровождение объектов ведут совместно длинноволновой и коротковолновой РЛС, определяя точную угловую координату в плоскости пространственного разноса РЛС из соотношения сторон треугльника, образованного измеренными дальностями и известным разносом.
| Теоретические основы радиолокации /Под ред.Я.Д.Ширмана | |||
| - М.: Сов.радио, 1970, с.494 | |||
| Interavia, 1987, IV, р.331 - 333. |

