Настоящее изобретение относится к устройству и способу регулирования многодвигательным электроприводом печатных машин. Из уровня техники известны групповые приводы печатных машин, которые описаны, например, в следующих публикациях.
1. На одну систему зубчатых колес или на один приводной вал, которые соединяют несколько различных печатающих аппаратов, несколько электродвигателей передают заданный вращающий момент. С помощью системы зубчатых колес обеспечивается синхронизация нескольких печатающих аппаратов. Некоторая избыточность вращающего момента приводит к постоянному прилеганию боковых поверхностей зубьев, что должно обеспечивать хорошее качество печати. Однако недостаток при этом заключается в том, что даже небольшая упругая деформация зубчатых колес существенно ухудшает качество печати, поскольку в результате постоянных колебаний момента нагрузки не может быть обеспечено приложение точного вращающего момента, необходимого в данный момент. Соответствующее устройство описано в заявке DE-OS 1563591.
2. Печатающие аппараты подразделены на секции, каждая из которых может приводиться от индивидуального, или автономного, привода таким образом, что в пределах одной секции печатающего аппарата имеет место лишь незначительная упругая деформация зубчатых колес. Работа отдельных секций печатающих аппаратов взаимно синхронизирована таким образом, что между ними обеспечивается точная передача бумажного листа. Недостаток такого устройства заключается в том, что отдельные секции печатающих аппаратов имеют очень большую массу и в дополнение к этому за один оборот воспринимают различные моменты нагрузки. В результате для достижения того же качества печати, которое известно для машин с одним приводом, требуется очень сложная система регулирования. В качестве альтернативы этому в заявке DE 4137979 А1 предлагается ограничить собственно регулирование передачей печатаемого листа с синхронизацией по углу. Это означает, что регулирование осуществляется лишь в определенном диапазоне углов около точки передачи, а вне этого диапазона поддерживается только постоянная частота вращения. В результате хотя и упрощается временной режим регулирования, однако вращающиеся массы остаются такими же большими.
Исходя из вышеизложенного, в основу настоящего изобретения была положена задача разработать соответствующие устройство и способ, которые позволили бы устранить недостатки, известные из уровня техники.
Согласно изобретению указанная задача решается с помощью отличительных признаков п.п.1 и 11 формулы изобретения.
Одно из преимуществ изобретения заключается в том, что применение листопередающей секции с автономным приводом, во-первых, позволяет устранить механические связи между различными секциями печатной машины, а во-вторых, сохранить простоту ее регулирования.
Печатающие аппараты в группах, расположенных до участка разделения и после него, остаются соединенными между собой обычными системами зубчатых колес, а каждая группа имеет собственный привод. Такое разделение позволяет оптимизировать характер колебаний расположенных в ряд печатающих аппаратов. Это означает, что значение резонансной частоты групп печатающих аппаратов все еще остается настолько большим, что при работе печатной машины с полной производственной мощностью, т.е. при максимальной рабочей скорости, возбуждение колебаний еще отсутствует. Регулировочные параметры этих приводов не требуется согласовывать между собой настолько точно, чтобы обеспечить синфазную передачу бумажного листа. Это в свою очередь означает, что фазовый сдвиг может быть компенсирован листопередающей секцией. Тем самым отпадает необходимость в подаче на привод печатающих аппаратов, установленных до листопередающей секции и за ней, таких регулирующих воздействий, которые требуют от этого привода быстрого срабатывания, вследствие чего возникновение обусловленных регулирующими воздействиями колебаний исключается, а печатная машина обеспечивает высокое качество печатной продукции. Образующийся при этом фазовый сдвиг разделенных печатающих аппаратов компенсируется за счет регулирования листопередающей секции. Иными словами, листопередающая секция забирает бумажный лист из расположенной перед ней группы печатающих аппаратов синхронно по фазе, корректирует рассогласование по фазному углу при вращательном движении для передачи листа на установленную за ней группу печатающих аппаратов и передает этот лист указанной группе аппаратов уже синхронно по фазе.
Быстрое срабатывание листопередающей секции на регулирующее воздействие обеспечивается благодаря тому, что она имеет малую массу, а на группы печатающих аппаратов, установленные до листопередающей секции и за ней, не оказывается механическое воздействие. Дополнительно к этому можно использовать электродвигатели, которые наряду с меньшим моментом нагрузки также обладают оптимальными регулировочными свойствами. Для этой цели наиболее пригодны приводные двигатели, непосредственно соединенные с валом листопередающей секции.
Листопередающая секция может быть реализована, например, в виде передаточного цилиндра. Из уровня техники известно выполнение передаточного цилиндра однооборотным, т.е. когда печатный и передаточный цилиндры имеют идентичную развертку (лист плюс канал). Кроме того, известно выполнение передаточного цилиндра в виде так называемого накопительного барабана, который является полуоборотным или 1/3-оборотным, т.е. его периметр в два или три раза превышает периметр печатного цилиндра. В любом случае отношение периметра передаточного цилиндра к периметру печатного цилиндра должно равняться целому числу.
Однако благодаря устранению механической связи целочисленное соотношение не является строго обязательным. Более того, если периметр передаточного цилиндра превышает периметр печатного цилиндра, например, в два с половиной раза, то достигаемое благодаря этому преимущество состоит в том, что увеличивается диапазон регулирования угла поворота, в пределах которого может осуществляться корректировка фазы. Далее, для корректировки фазы также можно использовать обусловленный наличием канала промежуток между двумя очередными листами.
В качестве примера можно рассмотреть случай, когда листопередающая секция после приема листа вращается с такой же окружной скоростью, что и все расположенные перед ней печатные цилиндры. При этом исключается относительное движение листа по поверхности транспортирующего его механизма, что предотвращает риск отмарывания. Если лист находится за пределами печатающего зазора, соответственно за пределами поверхности прилегания передающего краску печатающего аппарата, то его можно ускорять или притормаживать до тех пор, пока не будет достигнуто точное совпадение фазы передаточного цилиндра с фазой последующих групп печатающих аппаратов. В этом случае вращательное движение листопередающей секции не является непрерывным, а модулируется в зависимости от диаметра и величины требуемой корректировки фазы.
В предпочтительном варианте выполнения изобретения моменты времени приема и передачи листа не совпадают, а рассчитаны таким образом, чтобы в интервале между этими моментами обеспечивалась возможность скорректировать фазу сначала относительно группы печатающих аппаратов, установленных перед листопередающей секцией, а затем относительно группы печатающих аппаратов, установленных за ней.
Другое преимущество изобретения состоит в том, что за счет регулирования соотношения фаз можно корректировать приводку. Целенаправленный фазовый сдвиг при приеме и/или передаче листа можно использовать с той целью, чтобы увеличивать или уменьшать размер удерживаемого захватом края листа бумаги, что позволяет настраивать приводку. То же самое относится и к случаю применения предлагаемого устройства при переворачивании печатаемого листа. Иными словами, листопередающая секция берет на себя функцию использовавшегося до настоящего времени цилиндра для переворачивания листов. Поскольку при двусторонней печати, как известно, прием переворачиваемого листа осуществляется за его задний край, а при перестройке с печатания на одной стороне листа на печатание на обороте и при использовании листов разных форматов необходимо проводить различные наладочные работы, согласно изобретению этого можно достичь за счет изменения программы простым нажатием кнопки. Благодаря этому время простоя печатной машины на ее переналадку в случае перехода на другой заказ значительно сокращается.
Существовавшая до настоящего времени опасность потери узлами машины синхронности работы при отказе одного из элементов системы регулирования и обусловленных этим столкновений в зоне захвата, которые могут привести к повреждению машины, может быть устранена благодаря предлагаемым согласно изобретению устройству и соответствующим образом осуществляемому способу. Так, например, при использовании в качестве листопередающей секции передаточного цилиндра, конструкцией которого предусмотрено наличие уплощенных сторон, его можно отвести в такое положение, в котором исключается его повреждение как передними, так и задними группами печатающих аппаратов. В случае неисправности в электросети бесперебойное электроснабжение можно обеспечить преобразованием кинетической энергии при работе в генераторном режиме. В это безопасное положение листопередающую секцию можно отводить также при останове печатной машины с целью обеспечить независимое проведение работ на группах печатающих аппаратов для наладки, мытья и т.д. Благодаря этому существенно сокращается продолжительность наладочных работ.
Предлагаемое согласно изобретению устройство может найти применение во всех случаях, где машина имеет секционное построение и состоит из установленных в ряд и соединенных между собой передаточным цилиндром групп печатающих аппаратов или отдельных печатающих аппаратов.
Согласно другому варианту предусматривается сохранение механической связи между группами печатающих аппаратов с помощью системы зубчатых колес и оснащение листопередающей секции автономным приводом. В этом случае листопередающая секция также может быть выполнена в виде отдельного обводного цилиндра. При этом привод цилиндра при приеме листа от предшествующей группы печатающих аппаратов обеспечивает точное прилегание боковых поверхностей зубьев этой группы к боковым поверхностям своих зубьев. В принципе при таком подходе речь также идет о корректировке фазы листопередающей секции относительно соответствующих групп печатающих аппаратов, но в пределах меньшего диапазона углов. При передаче листа от листопередающей секции к последующим группам печатающих аппаратов соответственно также обеспечивается точное прилегание боковых поверхностей зубьев привода к боковым поверхностям зубьев этих групп. Такое решение можно соответствующим образом реализовать при помощи пригодных для этой цели датчиков для измерения разности углов или систем измерения вращающих моментов. Измерение разностей углов можно проводить, например, с помощью двух инкрементных датчиков, каждый из которых установлен на узлах, непосредственно задействованных в передаче листов. В пределах упругой деформации зубчатых колес определенная регулируемая разность углов связана пропорциональной зависимостью с передаваемым вращающим моментом.
Регулирование разделенных групп печатающих аппаратов осуществляется таким образом, что они работают как отдельные печатные машины, если не учитывать, что поток момента на переходном участке направлен в одну и ту же сторону. В задачу установленного между группами передаточного узла входит обеспечить прилегание боковых поверхностей зубьев в правильном направлении. В частности, это означает, что в случае передачи листа к листопередающей секции от установленной перед ней группы печатающих аппаратов поток момента должен быть направлен в сторону листопередающей секции. При необходимости такое направление может быть обеспечено путем приложения к листопередающей секции от ее привода некоторого тормозящего момента. В случае передачи листа от листопередающей секции к расположенной за ней группе печатающих аппаратов поток момента, приложение которого осуществляет привод листопередающей секции, создается в направлении к этой последующей группе печатающих аппаратов.
Используемое в описании понятие "группа печатающих аппаратов" не ограничено только объединенными в группы собственно печатающими аппаратами, но относится также к сочетанию печатающего аппарата с самонакладом или печатающего аппарата с устройством вывода листов. Это справедливо также и в отношении лакировальных аппаратов или других аналогичных агрегатов, в которых обработка листа происходит поточным методом.
Ниже изобретение более подробно поясняется на примерах его осуществления со ссылкой на прилагаемые чертежи, на которых показано:
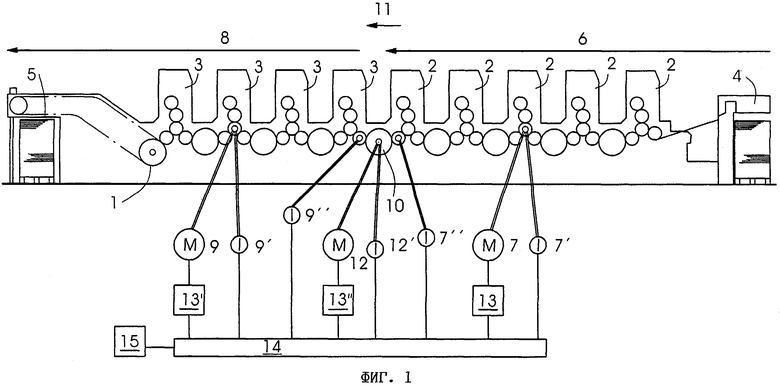
на фиг.1 - схема предлагаемого согласно изобретению устройства;
на фиг.2 - блок-схема системы регулирования привода;
на фиг.3 - структурная схема системы регулирования привода;
на фиг.4 - блок-схема процесса регулирования;
на фиг.5 - график изменения скорости передаточного цилиндра в зависимости от времени.
На фиг.1 показана печатная машина 1 с несколькими расположенными секциями печатающими аппаратами 2, соответственно 3. Печатаемый лист транспортируется от самонаклада 4 через печатающие аппараты 2 и 3 к выводному устройству 5. Печатающие аппараты 2 и самонаклад 4 связаны между собой системой зубчатых колес, что схематически показано стрелкой 6. Привод этой группы печатающих аппаратов 2 и самонаклада 4 осуществляется от электродвигателя 7. Печатающие аппараты 3 и выводное устройство 5 также связаны между собой системой зубчатых колес, что схематически показано стрелкой 8. Привод этой группы печатающих аппаратов 3 вместе с выводным устройством 5 осуществляется от электродвигателя 9. Между обеими группами печатающих аппаратов 2 и 3 расположена листопередающая секция 10, которая механически не связана с системами зубчатых колес обеих групп печатающих аппаратов 2, соответственно 3, т.е. является механически автономной. Стрелкой 11 обозначена функция листопередающей секции 10 как узла, соединяющего группы печатающих аппаратов 2 и 3. В данном примере листопередающая секция 10 выполнена в виде передаточного цилиндра. Однако для этой цели может использоваться и любая другая листопередающая система. Листопередающая секция 10 приводится от электродвигателя 12, ответный сигнал об угловом положении которого выдается инкрементным датчиком 12’. Информация об угловом положении двух других электродвигателей 7, 9 выдается инкрементными датчиками 7’, 9’. Электроснабжение всех электродвигателей 7, 9, 12 осуществляется от силовых блоков 13, 13’, 13’’ в соответствии с требуемой для них мощностью.
Регулирование трех электродвигателей 7, 9, 12 осуществляется с помощью регулирующего устройства 14. Задача последнего состоит в том, чтобы регулировать электродвигатели 7 и 9 в соответствии с заданной частотой их вращения таким образом, чтобы угловая разность между обеими группами печатающих аппаратов 2 и 3 не превышала заданного значения. Максимальная разность зависит от динамики системы привода листопередающей секции 10. Кроме того, в задачу регулирующего устройства 14 входит также точно согласовывать по фазе момент времени приема листа листопередающей секцией 10 с последним листонаправляющим цилиндром или барабаном расположенной перед ней группы печатающих аппаратов 2, а момент времени передачи листа от листопередающей секции 10 точно согласовывать по фазе с первым листонаправляющим барабаном или цилиндром расположенной за ней группы печатающих аппаратов 3.
Перед регулирующим устройством 14 включен задатчик 15, который служит для задания значений различных параметров, таких, например, как частота вращения, момент начала установки в определенное угловое положение, значения функций ускорения и торможения и т.п.
В предлагаемом устройстве может оказаться целесообразным предусмотреть дополнительные инкрементные датчики 7’’, соответственно 9’’ на каждом из листонаправляющих цилиндров или барабанов, непосредственно примыкающих к листопередающей секции 10. Альтернативно этому инкрементные датчики 7’ и 9’ можно было бы предусмотреть не для цилиндра, осуществляющего приложение вращающего момента, а для цилиндров, примыкающих к листопередающей секции.
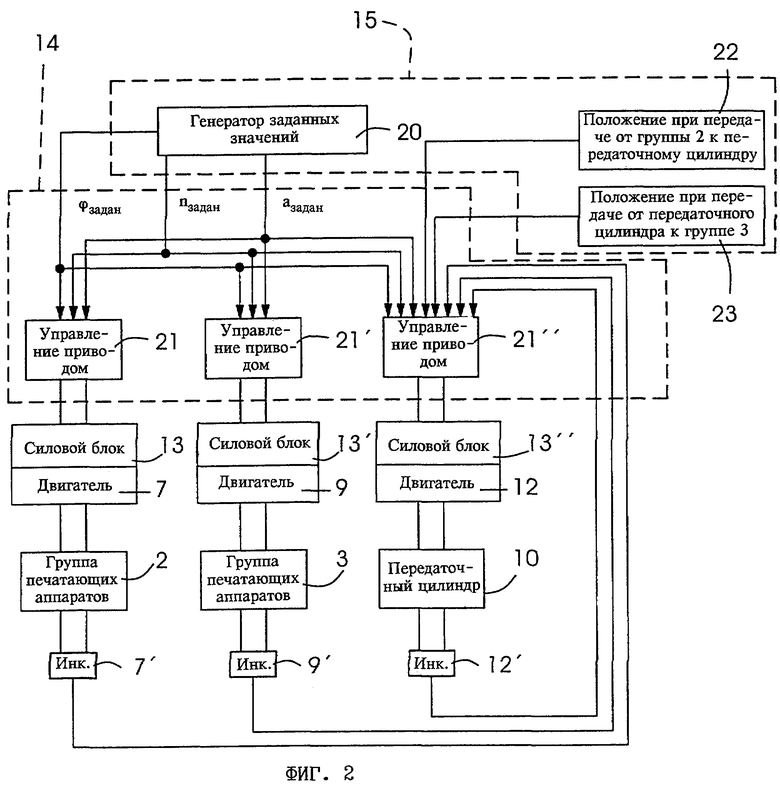
На фиг. 2 показана блок-схема системы регулирования привода. Генератор 20 заданных значений выдает заданное значение угла ϕзадан, заданную частоту вращения nзадан и заданное значение ускорения aзадан. Эти значения передаются на блоки 21, 21’ и 21’’ управления соответствующими приводами. Блок 21 взаимодействует с силовым блоком 13, который осуществляет электроснабжение электродвигателя 7. Этот электродвигатель 7 является приводом для группы печатающих аппаратов 2. Аналогично этому осуществляется ввод заданных значений ϕзадан, nзадан, aзадан, в блок 21’управления приводом, который соединен с силовым блоком 13’ и вместе с электродвигателем 9 входит в состав привода группы печатающих аппаратов 3.
То же самое относится и к блоку 21’’ управления приводом, силовому блоку 13’’ и электродвигателю 12, причем эти компоненты осуществляют регулирование привода передаточного цилиндра 10. Инкрементные датчики 7’, 9’, 12’, относящиеся к соответствующим группам печатающих аппаратов 2, 3 и к передаточному цилиндру 10, передают свои значения, соответствующие угловым положениям упомянутых выше компонентов, на блок 21’’ управления приводом, на который дополнительно поступает информация о конструктивно обусловленном положении бумажного листа при передаче. Альтернативно этому с помощью датчика можно также определять положение кромки листа, соответственно положение захвата и т.п., и использовать значения этих измеряемых величин в качестве фактического значения при регулировании процесса передачи листа. В другом варианте можно также предусмотреть сочетание датчика положения с инкрементным датчиком. По значению положения при передаче (блок 22) определяется, в каком угловом положении происходит передача очередного листа от группы печатающих аппаратов 2 к передаточному цилиндру 10. По значению положения при передаче (блок 23) определяется, в каком угловом положении происходит передача листа от передаточного цилиндра 10 к группе печатающих аппаратов 3. Положения при передаче обусловлены механической конструкцией, однако при работе в режиме двустороннего печатания они могут определяться форматом печатаемого листа.
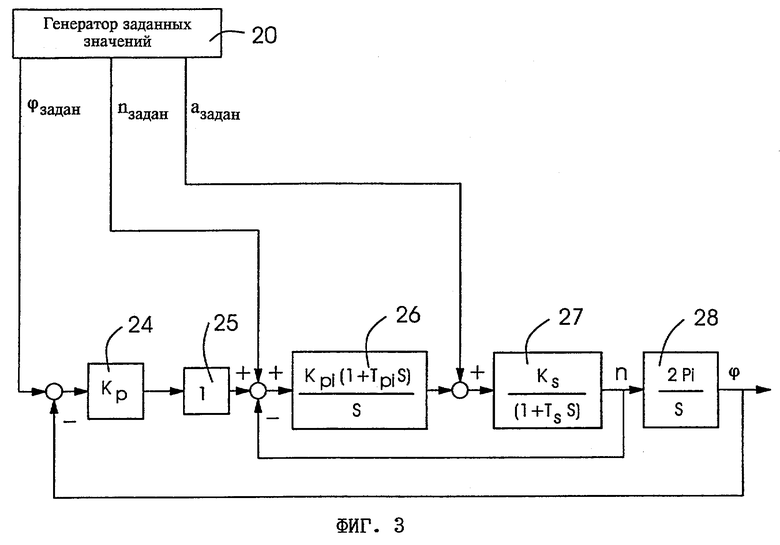
На фиг.3 показана структурная схема системы регулирования привода, известная из уровня техники. Генератор 20 заданных значений в качестве задающих воздействий выдает на регулятор заданные значения ϕзадан, nзадан, aзадан. Регулируемыми величинами являются частота вращения n и угол ϕ, фактические значения которых определяются в результате обработки сигналов инкрементных датчиков 7’, 9’, 12’. Отдельными компонентами системы регулирования являются следующие регуляторы, соответственно объекты регулирования:
пропорциональный регулятор 24, 25, применяемый в качестве регулятора положения, при этом Кp обозначает пропорциональный коэффициент усиления,
пропорционально-интегральный регулятор 26, используемый в качестве регулятора скорости с коэффициентом усиления Кpi,
объект 27 регулирования, где КS представляет собой коэффициент усиления объекта, а через TS обозначена его постоянная времени,
блок 28, представляющий собой вычислительную операцию, в ходе выполнения которой из фактического значения частоты вращения n формируется фактическое значение угла ϕ, при этом через S обозначен оператор Лапласа.
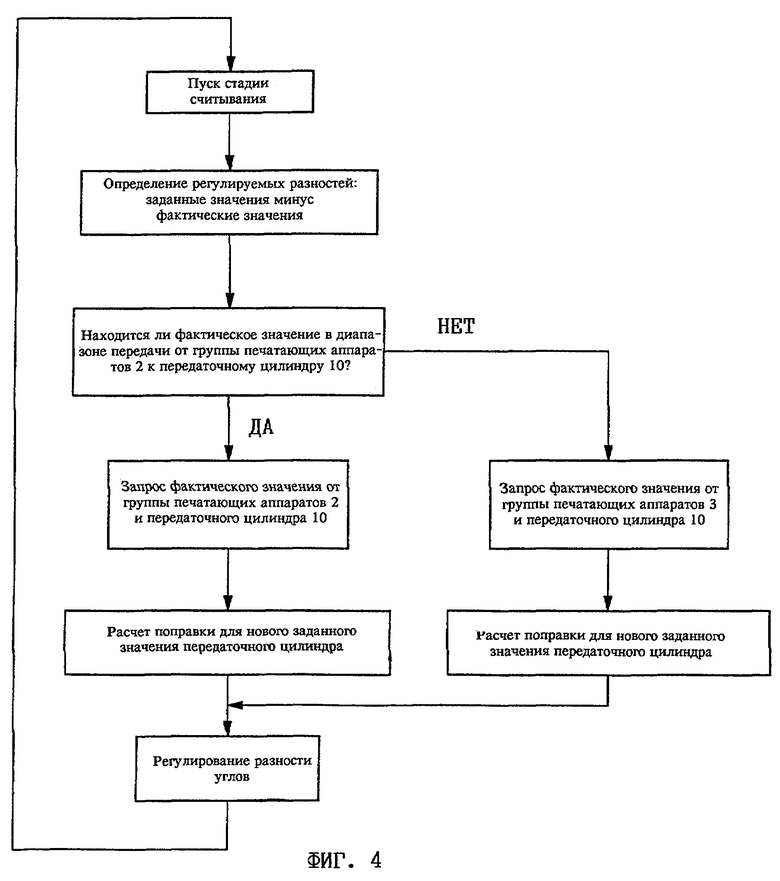
На фиг.4 представлена блок-схема процесса регулирования, поясняющая взаимодействие передаточного цилиндра 10 с группами печатающих аппаратов 2 и 3. При этом задаются два диапазона, а именно диапазон, в котором происходит регулирование положения передаточного цилиндра 10 в зависимости от положения группы печатающих аппаратов 2, и диапазон, в котором происходит регулирование положения передаточного цилиндра 10 в зависимости от положения группы печатающих аппаратов 3. При этом для регулятора передаточного цилиндра рассчитываются соответственно заданное значение угла ϕзадан, заданное значение частоты вращения nзадан и заданное значение ускорения aзадан, а на следующей стадии осуществляется регулирование разности углов.
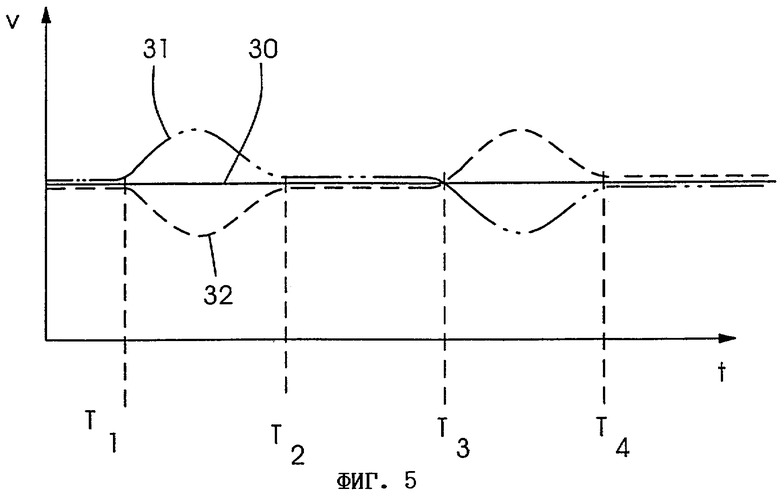
На фиг.5 показан график зависимости скорости передаточного цилиндра 10 от времени, в течение которого происходит транспортировка одного листа. Это означает, что в течение этого отрезка времени лист забирается из группы печатающих аппаратов 2, транспортируется, а затем передается на группу печатающих аппаратов 3. На графике представлены три различные зависимости скорости, изображенные кривыми 30, 31 и 32.
Кривая 30 характеризует постоянную скорость, которая имеет место при условии, что между группами печатающих аппаратов 2 и 3 отсутствует фазовый сдвиг. В этом случае задача передаточного цилиндра 10 заключается в том, чтобы поддерживать свою скорость точно на уровне значения скоростей обеих групп печатающих аппаратов 2 и 3 с целью обеспечить синхронизированную по углу передачу листа.
На участке кривой 31 до момента Т1 скорость имеет постоянное значение, как и на кривой 30. До этого момента Т1 транспортируемый лист еще контактирует с барабаном, соответственно цилиндром, расположенным перед передаточным цилиндром 10. Если бы на этом отрезке времени произошло ускорение или торможение передаточного цилиндра 10, то это могло бы привести к отмарыванию краски на листе. Поэтому в пределах этого критического диапазона углов передаточный цилиндр 10 движется с той же окружной скоростью, что и последний барабан, соответственно последний цилиндр группы печатающих аппаратов 2. Начиная с момента Т1, лист полностью находится на передаточном цилиндре 10, и поэтому может быть осуществлена корректировка по фазе. Согласно кривой 31 с момента Т1 происходит ускорение, т.е. передаточный цилиндр 10 ликвидирует угловое отставание от последующей группы печатающих аппаратов 3. С момента Т2 устанавливается угловая синхронность по отношению к последующей группе печатающих аппаратов 3, и передаточный цилиндр 10 движется с постоянной скоростью, соответственно с такой же окружной скоростью, что и последующая группа печатающих аппаратов 3. В интервале времени между моментами Т2 и Т3 может быть обеспечена передача листа от передаточного цилиндра 10 группе печатающих аппаратов 3. Это можно осуществить, например, с помощью кулачкового управления, что известно из уровня техники. Начиная с момента T3 и до момента Т4 происходит торможение передаточного цилиндра 10. При этом торможении передаточный цилиндр 10 снова начинает отставать на угол, который он нагнал на отрезке времени от момента Т1 до момента Т2. С момента Т4 снова устанавливается угловая синхронность между передаточным цилиндром 10 и группой печатающих аппаратов 2, и может быть осуществлена синхронизированная по углу передача листа от группы печатающих аппаратов 2 на передаточный цилиндр 10. Начиная с момента времени Т4, процесс повторяется, причем амплитуда кривой, т.е. величина ускорения, соответственно торможения передаточного цилиндра 10, может принимать различные значения в зависимости от фактической разности углов.
Кривая 31 описывает случай, когда имеется положительная разность углов в направлении от группы печатающих аппаратов 2 к группе печатающих аппаратов 3, т.е. группа печатающих аппаратов 3 опережает группу печатающих аппаратов 2. Кривая 32 описывает противоположный случай, т.е. когда группа печатающих аппаратов 2 отстает от группы печатающих аппаратов 3. Поэтому на отрезке времени между моментами Т1 и Т2 сначала происходит торможение передаточного цилиндра 10, а затем между моментами Т3 и Т4 - его ускорение.
Изобретение относится к устройству и способу регулирования многодвигательным электроприводом печатных машин. В устройстве синхронизации, по меньшей мере, двух групп печатающих аппаратов (2, 3), образующих одну листовую печатную машину (1), каждая из этих групп печатающих аппаратов (2, 3) имеет в качестве привода, по меньшей мере, один автономный приводной электродвигатель (7, 9) и систему зубчатых колес. Между группами печатающих аппаратов (2, 3) предусмотрена, по меньшей мере, одна листопередающая секция (10) с автономно регулируемым приводом (12). Устройство и способ регулирования привода могут быть использованы для печатных машин с несколькими механически автономными электродвигателями, в частности, по меньшей мере, двух групп печатающих аппаратов (2, 3), образующих одну листовую печатную машину (1). Изобретение предназначено для применения в листовых печатных машинах секционного построения и обеспечивает упрощение регулирования за счет устранения механических связей между различными секциями печатной машины. 2 н. и 10 з.п. ф-лы, 5 ил.
| DE 4137979 А, 27.05.1993 | |||
| US 5481971 A, 09.01.1996 | |||
| Тарелка для контактирования пара (газа) и жидкости | 1976 |
|
SU615941A1 |
| US 3452261 A, 24.06.1969. | |||

