1.1. Название изобретения
Манипулятор “Черепаха Прохорова” (варианты), “колесо Прохорова”, фрикционный компас.
1.2. Область техники, к которой относится изобретение
Изобретение по части "Манипулятор “Черепаха Прохорова”" относится к устройствам ручного ввода информации в компьютер.
Изобретение по части “колесо Прохорова” относится к опорно-движительным механизмам. Устройство может быть использовано в качестве опорного элемента, в качестве опорно-движительной части передвигаемого устройства, поддерживающе-движительной части неподвижного транспортирующего устройства в транспортных машинах, робототехнике, креслах для инвалидов, устройствах вывода графической информации компьютеров, игрушках, аттракционах и т.п., а также в составе датчиков измерения линейных перемещений.
Изобретение по части “фрикционный компас” относится к опорно-движительным механизмам, допускающим лишь поступательное перемещение устройства по опорной поверхности в любом направлении, за счет чего обеспечивается постоянство ориентации устройства при его перемещении по опорной поверхности.
1.3. Уровень техники
1.3.1. Известен ряд конструкций двух- и трехкоординатных манипуляторов типа "мышь", например, некоторые конструкции описаны в
[1] Патент России SU 1737473 A1 от 30.05.92.
[2] Прохоров В.В. Трехкоординатный манипулятор графической информации "черепаха". Патент России RU 2123201 С1, 31.03.97
[3] Olson, L.T. hiertial mouse system. Patent US 4787051, Nov.22, 1988.
[4] Lawrence, James G.; Diaz, Oscar R.; Erdmann (Jr.), Robert E. Point and select device. Patent US 4939508A, July 07, 1990 (Oct.31, 1988).
[5] Glynn, B.J. Computer apparatus input device for three-dimensional information. Patent US 5181181, Sep.27, 1990.
[6] Gomiak, A.M. System and apparatus for providing three dimensions of input into a host processor. Patent US 4961138, Oct.2, 1990.
Конструкция [1] включает перемещаемый оператором рукой по опорной поверхности корпус, в котором установлен двухкоординатный датчик перемещения, состоящий из шара, расположенного в гнезде корпуса и соприкасающегося с опорной поверхностью под действием собственного веса, кинематически связанных с шаром двух валиков, величина поворота каждого из которых регистрируется датчиком, с каждым из валиков соединены флажки, направление отклонения которых регистрируется еще 2-мя датчиками.
Одним из недостатков этой конструкции является уязвимость к загрязнениям, поскольку шарик соприкасается одной и той же поверхностью как с опорной поверхностью, так и с валиками.
Недостатком указанной конструкции является и невозможность работы ее в условиях вибраций, негоризонтальности опорной поверхности и невесомости.
Еще один недостаток данной конструкции - отсутствие измерения поворота манипулятора относительно оси, перпендикулярной опорной поверхности.
1.3.2. На настоящий момент известны различные конструкции опорно-движительных устройств для перемещения на плоскости по двум координатам, например, основанных на использовании шаровых опор. Конструкции этих устройств описаны, например, в
[7] Chicurel, E.J. Spherical drive vehicle. Patent US 3655005 Sep.26, 1969.
[8] Browning, A.E. Vehicle having spherical supports. Patent US 3858673. Oct.1, 1973.
[9] Derby, S.L. Mobile chair. Patent US 4413693. Mar.27, 1981.
Движительное устройство, описанное в патенте US 3858673, включает поворачивающийся вокруг вертикальной оси остов-раму с группой роликов, охватывающих опорную сферу; ролики расположены таким образом, что обеспечивают одну степень свободы сферы относительно остова-рамы: при неподвижном остове-раме возможны лишь такие движения сферы, при которых ее центр неподвижен относительно остова-рамы, а вращение сферы возможно только вокруг некоторой мыслимой горизонтальной оси, положение которой фиксировано относительно остова-рамы. Ввиду отсутствия относительного проскальзывания роликов и сферы поворот остова-рамы вокруг ее оси вызывает поворот сферы вокруг вертикальной оси. С верхней точкой сферы соприкасается приводное колесо, ось вращения которого закреплена на остове-раме таким образом, что она параллельна оси возможного вращения сферы. Таким образом, при повороте приводного колеса конструкция перемещается по опорной поверхности в направлении, определяемом поворотом остова-рамы вокруг своей оси.
Недостатками данного устройства являются сложность конструкции, низкая скорость смены направления движения и большие ошибки позиционирования в связи с большими ошибками отработки направления перемещения.
1.4. Сущность изобретения
1.4.1. Изобретение по части "Манипулятор “Черепаха Прохорова”" относится к устройствам ручного ввода информации в компьютер.
Задачи преодоления влияния на работоспособность устройства загрязненности опорной поверхности, обеспечения работоспособности устройства в условиях вибраций и невесомости, а также возможности простого измерения, наряду с поступательными движениями, поворота манипулятора относительно оси, перпендикулярной опорной поверхности, решены в изобретении по п.1 формулы путем использования однокоординатных “колесных датчиков” линейного перемещения по опорной поверхности, каждый из которых измеряет компоненту перемещения некоторой связанной с датчиком “точки измерения” вдоль некоторого связанного с датчиком “направления измерения”, параллельного опорной поверхности, и нечувствителен к компоненте перемещения точки измерения в направлении, перпендикулярном направлению измерения. Каждый из “колесных датчиков” включает специальный “двухкоординатный колесоподобный элемент” (2кКЭ) с осью вращения, параллельной или наклонной к опорной поверхности, обладающий способностью не только катиться (в широком смысле) подобно обычному колесу в направлении, перпендикулярном оси вращения 2кКЭ, но и перемещаться по опорной поверхности в произвольном направлении относительно оси вращения 2кКЭ, в том числе - в направлении, перпендикулярном направлению его возможного качения, причем все такие движения для 2кКЭ происходят без проскальзывания. Кроме 2кКЭ колесный датчик содержит датчик поворота 2кКЭ, регистрирующий поворот 2кКЭ вокруг оси его оси. Измерения датчика поворота 2кКЭ характеризуют значение компоненты перемещения точки измерения вдоль направления возможного качения 2кКЭ, так что направление возможного качения является “направлением измерения” колесного датчика линейного перемещения.
Манипулятор состоит из корпуса и нескольких 2кКЭ на осях, поворот всех или части 2кКЭ регистрируется датчиками поворота. 2кКЭ могут выполнять как измерительные функции (измерительные 2кКЭ) в составе колесных датчиков, так и служить опорами при перемещении манипулятора по опорной поверхности (опорные 2кКЭ).
В зависимости от количества используемых колесных датчиков возможно измерение манипулятором линейных перемещений (если использован один колесный датчик), двух координат перемещения манипулятора по опорной поверхности (при использовании двух колесных датчиков), а также и поворотов манипулятора относительно прямой, перпендикулярной опорной поверхности (при использовании трех и более колесных датчиков).
1.4.2. Задача измерения наряду с поступательными перемещениями и поворота манипулятора вокруг оси, перпендикулярной опорной поверхности, решена в изобретении по п.2 формулы посредством использования в конструкции трех колесных датчиков. Оси 1-го и 2-го 2кКЭ соединены с механическим дифференциалом, поворот выходной оси которого, а также повороты 1-го и 3-го 2кКЭ измеряются датчиками поворота. При движении манипулятора показания датчиков поворота 1-го и 3-го 2кКЭ отражают линейное перемещение манипулятора. Показание датчика поворота выходной оси дифференциала отражает поворот манипулятора вокруг оси, перпендикулярной опорной поверхности. Выходы трех датчиков поворота являются выходом устройства.
1.4.3. Задача измерения координат манипулятора в системе координат, связанной с опорной поверхностью, решена в изобретении по п.3 формулы изобретения путем использования в манипуляторе устройства “фрикционный компас” - узла из двух или более 2кКЭ одинакового размера, закрепленных на общей оси и выполняющих функции опорных элементов. Вследствие равенства размеров и нахождения на одной оси, а также вследствие свойства этих элементов свободно перемещаться в направлении, параллельном оси, обеспечивается возможность лишь плоскопараллельного перемещения манипулятора. Перемещения манипулятора могут регистрироваться датчиком поворота, связанным с общей осью 2кКЭ, входящих в устройство “фрикционный компас”, и дополнительными колесными или иными датчиками линейного перемещения.
1.4.4. Задача измерения поворота верхней части корпуса манипулятора относительно опорной поверхности решена в изобретении по п.4 формулы изобретения путем выполнения верхней части корпуса устройства подвижной относительно основания манипулятора и установкой на основании манипулятора устройства “фрикционный компас”. При этом, вследствие обеспечения устройством “фрикционный компас” возможности только плоскопараллельного перемещения манипулятора, показания датчика поворота верхней части корпуса относительно основания позволяют определять поворот верхней части корпуса относительно опорной поверхности. Выходы трех датчиков поворота являются выходом устройства.
1.4.5. Задача реализации двухкоординатного колесоподобного элемента, обладающего способностью перемещаться по опорной поверхности в произвольном направлении без проскальзывания, решена в данном изобретении по части “колесо Прохорова” путем использования образующих периферийную (соответствующую ободу традиционного колеса и контактирующую с опорной поверхностью при движении) часть этого колесоподобного элемента опорных тел вращения, которые закреплены на остове-раме, поворачивающемся относительно оси этого колесоподобного элемента, таким образом, что каждое из них может поворачиваться вокруг своей оси вращения, перпендикулярной оси вращения этого колесоподобного элемента и не пересекающей ось вращения двухкоординатного колесоподобного элемента.
При описанной конструкции устройство может перемещаться по опорной поверхности в направлении, перпендикулярном оси вращения остова-рамы за счет вращения остова-рамы вокруг оси вращения остова-рамы; при этом опорные тела вращения неподвижны относительно остова-рамы. С другой стороны устройство может перемещаться по опорной поверхности в направлении вдоль оси вращения остова-рамы за счет вращения опорного тела вращения, соприкасающегося с опорной поверхностью, вокруг его оси (или вращения всех таких опорных тел вращения, если их несколько, вокруг их осей), при этом остов-рама не поворачивается относительно оси вращения остова-рамы. При движении устройства по опорной поверхности в произвольном направлении могут вращаться и остов-рама и опорные тела вращения одновременно.
Данный 2кКЭ может исполнять опорные функции, обеспечивая возможность перемещения по опорной поверхности в произвольном направлении устройства, опирающегося на такие колеса при закреплении оси колеса на корпусе устройства.
При подсоединении датчика, регистрирующего угол (или скорость) поворота этого колеса вокруг оси его оси, этот 2кКЭ может являться составной частью измерителя проекции вектора перемещения (или скорости) колеса относительно опорной поверхности на направление в плоскости опорной поверхности, перпендикулярное оси вращения колеса.
При подсоединении привода к оси колеса оно может выполнять движительные функции, передавая усилие от привода колесу, создавая усилие, направленное перпендикулярно оси колеса и не препятствуя перемещениям колеса по опорной поверхности в перпендикулярном этому направлении. Таким образом, сочетание нескольких подобных колес может создавать движущее усилие произвольного направления.
1.4.6. Задача стабилизации направления на плоскости решена в изобретении по части: Ошибка! Источник ссылки не найден - путем использования механизма, состоящего из соприкасающихся с опорной поверхностью двух или более равновеликих 2кКЭ по п.5 формулы изобретения, обладающих способностью перемещаться по опорной поверхности в двух направлениях без проскальзывания - как катиться подобно обычному колесу, так и перемещаться в направлении вдоль оси 2кКЭ. За счет равенства углов их поворота ввиду соединения колес общей осью и равенства размеров 2кКЭ величины перемещения точек оси вращения остова-рамы в направлении, перпендикулярном этой оси, совпадают, так что эта ось может перемещаться только поступательно, оставаясь параллельной своему исходному положению. В то же время, ввиду способности каждого из 2кКЭ беспрепятственно перемещаться в направлении вдоль оси вращения остова-рамы, устройство может беспрепятственно перемещаться в направлении вдоль оси вращения остовов-рам.
1.5. Сведения, подтверждающие возможность осуществления изобретения
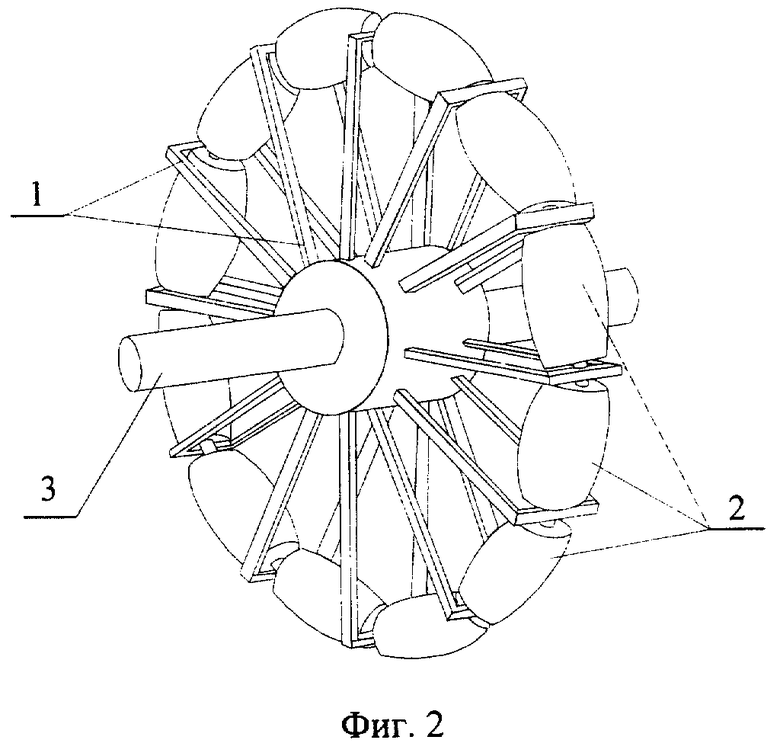
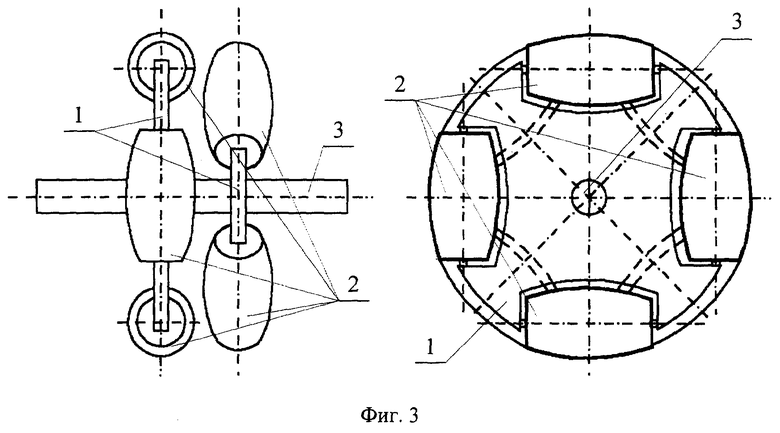
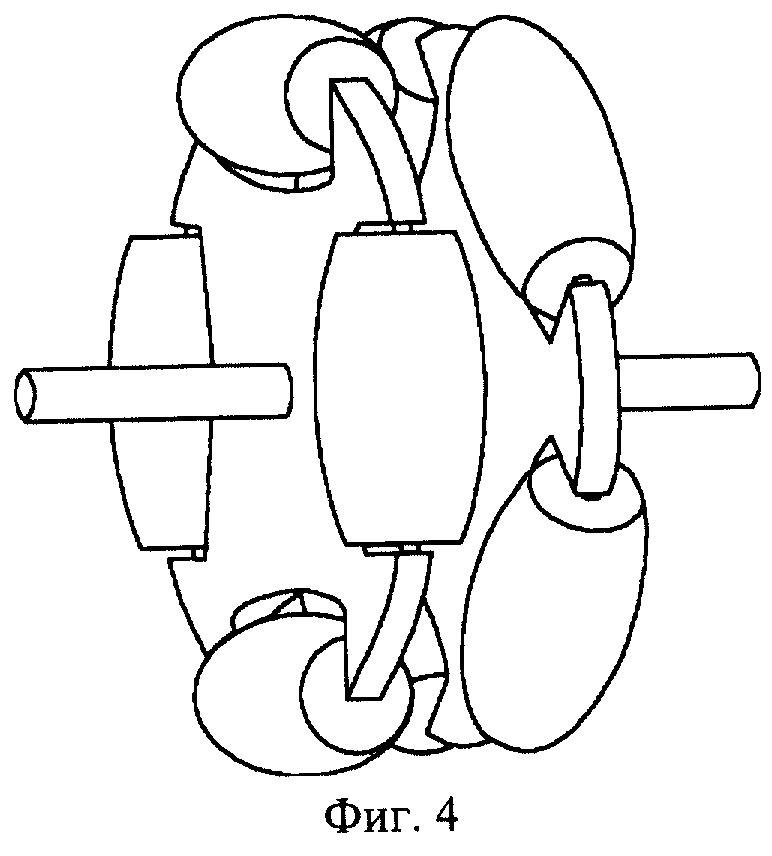
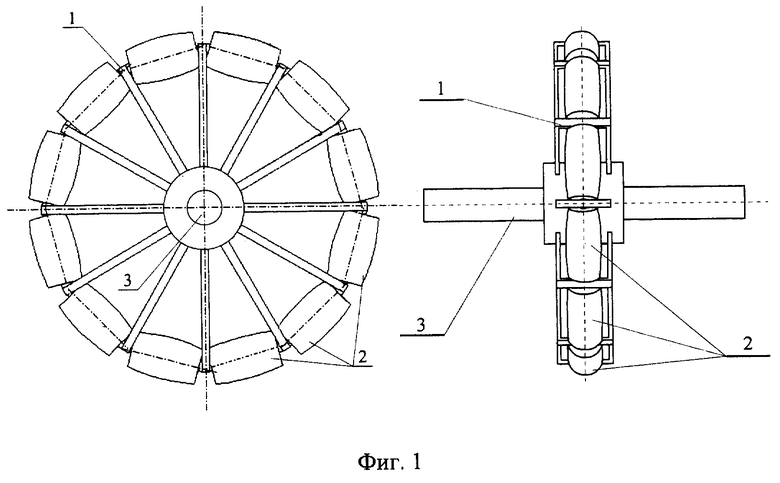
1.5.1. Одно из возможных инженерных решений 2кКЭ представлено на фиг.1, фиг.2. Еще одно решение приведено на фиг.3, фиг.4.
Устройство состоит из остова-рамы 1, оси вращения остова-рамы 3 и некоторого количества опорных тел вращения 2, которые могут свободно вращаться вокруг осей, закрепленных на периферии остова-рамы перпендикулярно оси вращения остова-рамы, образуя колесоподобный элемент. При описанной конструкции устройство может за счет вращения остова-рамы вокруг оси вращения остова-рамы перемещаться по опорной поверхности в направлении, перпендикулярном оси вращения остова-рамы; при этом опорные тела вращения неподвижны относительно остова-рамы. С другой стороны устройство может перемещаться по опорной поверхности в направлении вдоль оси вращения остова-рамы за счет вращения опорного тела вращения, соприкасающегося с опорной поверхностью (всех таких опорных тел вращения, если их несколько) вокруг его оси, при этом остов-рама не поворачивается относительно вращения остова-рамы. При движении устройства по опорной поверхности в произвольном направлении могут вращаться и остов-рама и опорные тела вращения.
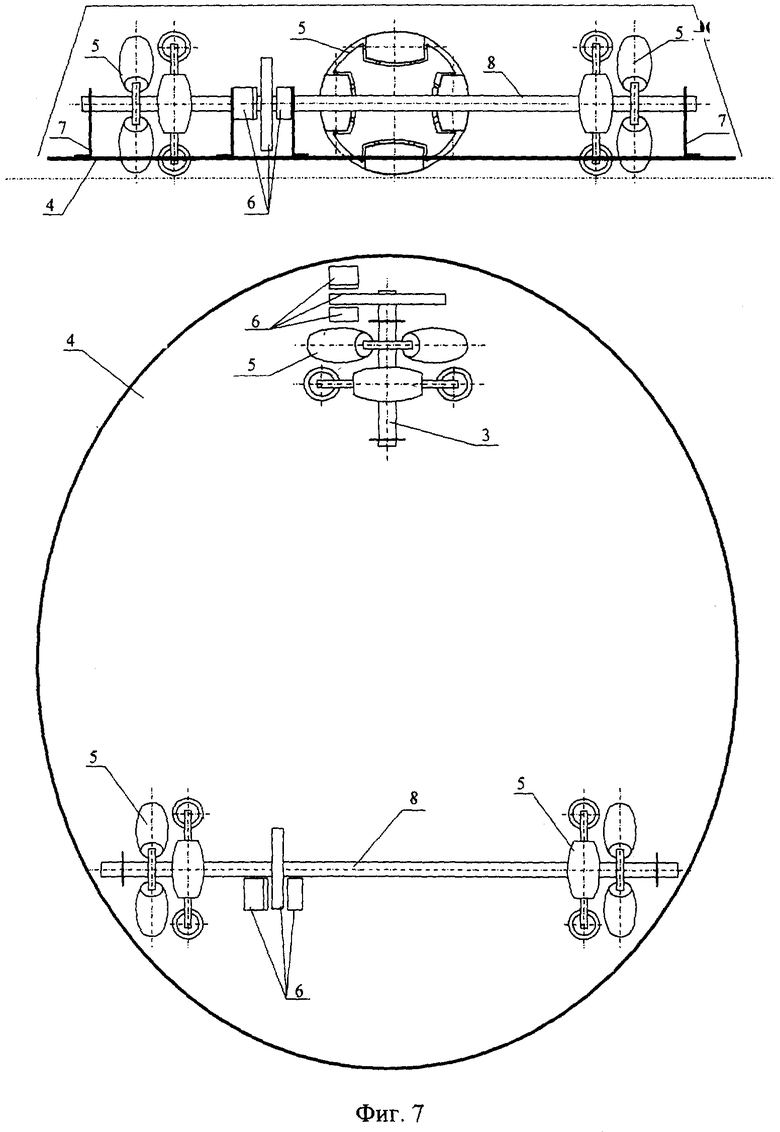
Одно из возможных инженерных решений устройства "Манипулятор “Черепаха Прохорова”" приведено на фиг.5. Представлена конструкция манипулятора, содержащего три 2кКЭ, каждый - с датчиком измерения положения 2кКЭ. Манипулятор содержит корпус 4, 2кКЭ 5, ось 2кКЭ 3, датчик поворота 2кКЭ 6, крепление оси 2кКЭ на корпусе 7.
В зависимости от количества используемых “колесных датчиков” возможно измерение манипулятором линейных перемещений (если использован один колесный датчик), двух координат перемещения манипулятора по опорной поверхности (при использовании двух колесных датчиков), а также и поворотов манипулятора относительно прямой, перпендикулярной опорной поверхности (при использовании трех и более колесных датчиков).
При использовании в манипуляторе одного или двух колесных датчиков показания датчиков поворота КЭ, входящих в состав колесных датчиков, могут непосредственно использоваться в прикладных программах, с которьми используется манипулятор.
При использовании в манипуляторе трех или более колесных датчиков показания колесных датчиков удобнее использовать после предварительного преобразования показаний датчиков дополнительным программным модулем компьютера, совместно с которым используется манипулятор, или встроенным в манипулятор микроконтроллером, в компоненты поступательного перемещения манипулятора и его поворот вокруг перпендикулярной опорной поверхности.
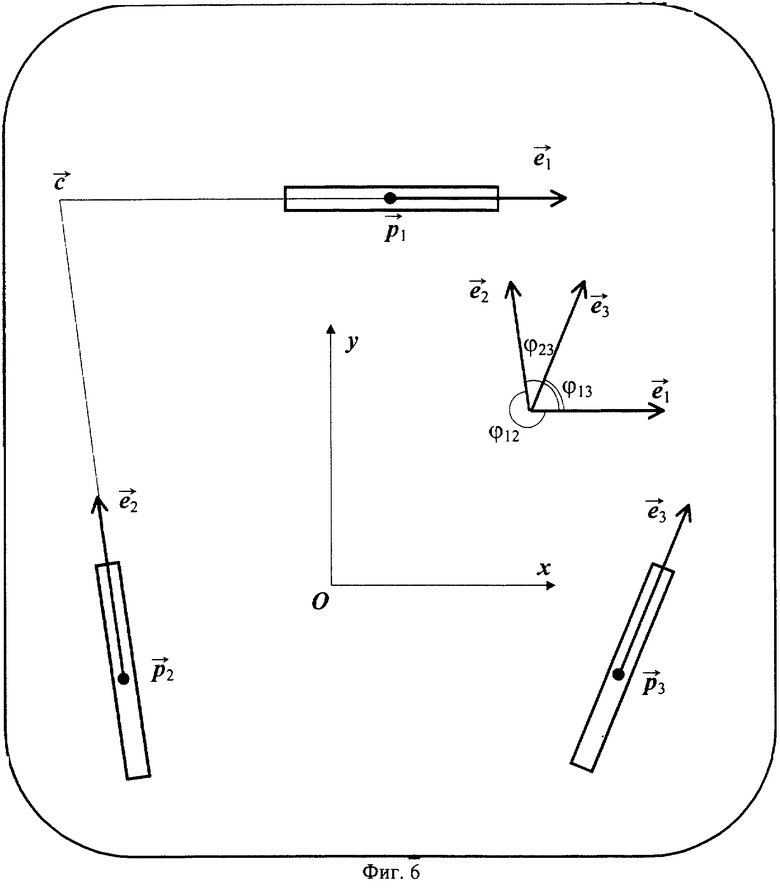
Покажем принципиальную возможность вычисления компонент поступательного движения и поворота манипулятора по показаниям колесных датчиков для случая, когда в манипуляторе использованы три колесных датчика. Будем считать, что выполнены два условия: (1) направления измерения 1-го и 2-го датчиков не параллельны, (2) направления измерения трех датчиков не пересекаются в одной точке. Построения поясняются на фиг.6.
Пусть в системе координат, связанной с манипулятором, точки измерения 1-, 2- и 3-го однокоординатных датчиков характеризуются векторами  соответственно (это двумерные вектора). Пусть единичные векторы направлений измерения колесных датчиков -
соответственно (это двумерные вектора). Пусть единичные векторы направлений измерения колесных датчиков -  Пусть ds1, ds2, ds3 - показания (либо приращения показаний) этих датчиков при малом перемещении манипулятора.
Пусть ds1, ds2, ds3 - показания (либо приращения показаний) этих датчиков при малом перемещении манипулятора.
Пусть  - произвольная фиксированная относительно манипулятора в данный момент времени точка рабочей поверхности. Поскольку в силу описанных свойств 2кКЭ (и колесного датчика в целом) i-й датчик измеряет проекцию перемещения точки измерения
- произвольная фиксированная относительно манипулятора в данный момент времени точка рабочей поверхности. Поскольку в силу описанных свойств 2кКЭ (и колесного датчика в целом) i-й датчик измеряет проекцию перемещения точки измерения  относительно опорной поверхности на направление
относительно опорной поверхности на направление  , то для любого i имеет место соотношение
, то для любого i имеет место соотношение  где
где  - проекция указанного векторного произведения на ось, перпендикулярную опорной поверхности,
- проекция указанного векторного произведения на ось, перпендикулярную опорной поверхности,  - перемещение точки
- перемещение точки  относительно опорной поверхности в системе координат, связанной с манипулятором, dω - поворот манипулятора относительно оси, перпендикулярной опорной поверхности. {...,...} обозначает скалярное, а (...×...) - векторное произведение векторов.
относительно опорной поверхности в системе координат, связанной с манипулятором, dω - поворот манипулятора относительно оси, перпендикулярной опорной поверхности. {...,...} обозначает скалярное, а (...×...) - векторное произведение векторов.
Выберем в качестве точки  точку пересечения двух прямых, одна из которых проходит через
точку пересечения двух прямых, одна из которых проходит через  в направлении
в направлении  , а другая проходит через
, а другая проходит через  в направлении
в направлении  . Тогда получаем уравнения:
. Тогда получаем уравнения:

Обозначим ϕij - угол между  , и
, и  , то есть
, то есть  . Тогда из предыдущего уравнения получаем:
. Тогда из предыдущего уравнения получаем:

Таким образом, выше получено (с точностью до обозначений), что

где  - фиксированные для данного манипулятора параметры, определяемые размещением и ориентацией колесных датчиков.
- фиксированные для данного манипулятора параметры, определяемые размещением и ориентацией колесных датчиков.
Если Оху - связанная с манипулятором система координат в опорной плоскости, то могут быть вычислены величины

где dux и duy - составляющие поступательного движения точки с манипулятора в системе координат Оху; dω - элемент вращательного движения манипулятора относительно оси, перпендикулярной опорной поверхности;  - фиксированные для данного манипулятора константы, определяемые размещением и ориентацией колесных датчиков на манипуляторе, а также выбором системы координат.
- фиксированные для данного манипулятора константы, определяемые размещением и ориентацией колесных датчиков на манипуляторе, а также выбором системы координат.
Таким образом, каждая из компонент движения манипулятора - поступательного по опорной поверхности и поворота относительно оси, перпендикулярной опорной поверхности, - может быть вычислена умножением показаний датчиков на некоторые коэффициенты и последующим суммированием. Эти вычисления могут быть выполнены, например, в программе компьютера, с которым используется манипулятор, либо в микроконтроллере, встроенном в сам манипулятор, поскольку команды умножения на число и сложения чисел входят в состав всех распространенных средств программирования микропроцессоров.
При количестве однокоординатных датчиков более трех вычисление компонент перемещения манипулятора может производиться, например, следующим образом. Для всех различных троек датчиков, для которых выполнены условия, что направления измерения этих датчиков не пересекаются в одной точке и не все направления измерения параллельны, по измерениям этой тройки датчиков возможно производить вычисления поступательных и вращательной компонент перемещения манипулятора. По получаемым для каждой из таких троек значениям можно вычислять средние поступательную и вращательную компоненты перемещения манипулятора.
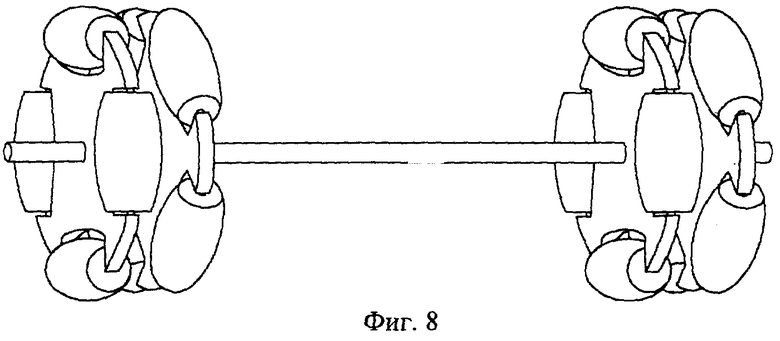
Конструкция манипулятора фиг.7 содержит 3 шт. 2кКЭ, 2 из которых закреплены на одной оси 8 (см. фиг.8). Подобное закрепление обеспечивает лишь поступательное перемещение манипулятора по опорной поверхности.
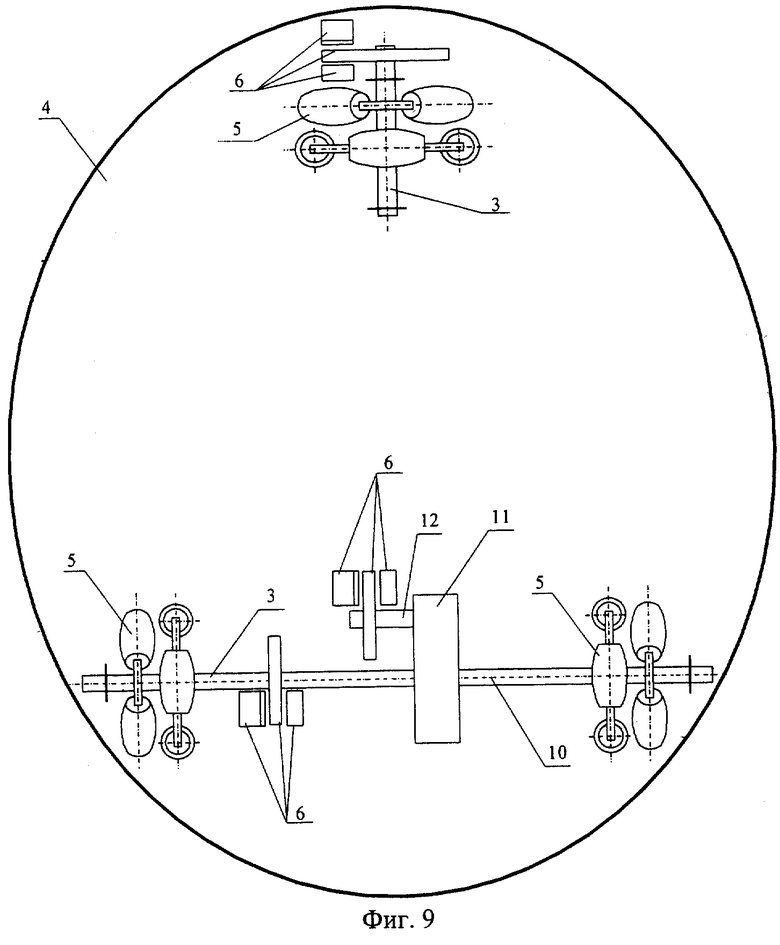
В конструкция фиг.9 оси 3 и 10 двух равновеликих 2кКЭ лежат на одной прямой, они соединены с механическим вычитателем углов - дифференциалом 11. Поворот выходной оси 12 дифференциала регистрируется датчиком поворота.
1.5.3. Задача обеспечения измерения линейных координат манипулятора "мышь" в неподвижной относительно опорной поверхности системе координат решена в данном изобретении по п.4 формулы путем использования нескольких равновеликих 2кКЭ, закрепленных на общей оси на основании манипулятора. Пример инженерного решения подобного манипулятора показан на фиг.9. Верхняя часть 13 корпуса устройства может поворачиваться относительно основания манипулятора вокруг оси, перпендикулярной опорной поверхности, положение основания манипулятора относительно верхней части корпуса манипулятора измеряется датчиком поворота 14.
Выходы двух датчиков поворота для двухкоординатного манипулятора или трех датчиков поворота для 3-координатного манипулятора являются выходом устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР "САМОХОДНАЯ ЧЕРЕПАХА ПРОХОРОВА WONDERTURTLE" (ВАРИАНТЫ) | 1999 |
|
RU2197746C2 |
| МАНИПУЛЯТОР "ЧЕРЕПАХА ПРОХОРОВА" | 1999 |
|
RU2180134C2 |
| ТРЕХКООРДИНАТНЫЙ МАНИПУЛЯТОР ГРАФИЧЕСКОЙ ИНФОРМАЦИИ "ЧЕРЕПАХА" | 1997 |
|
RU2123201C1 |
| ТРЕХКООРДИНАТНЫЙ МАНИПУЛЯТОР ГРАФИЧЕСКОЙ ИНФОРМАЦИИ "ЧЕРЕПАХА" НА БАЗЕ ОДНОКООРДИНАТНЫХ ДАТЧИКОВ | 1999 |
|
RU2168208C2 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2446983C2 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
| ЛИНЕЙНЫЙ МАГНИТ И КОМПАС НА ЕГО ОСНОВЕ | 2003 |
|
RU2259610C2 |
| Колпачок для концов экипажных осей | 1931 |
|
SU34329A1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |

Изобретение относится к устройствам ручного ввода информации в компьютер. Техническим результатом является обеспечение работоспособности устройства в условиях вибрации и невесомости, а также обеспечение поворота манипулятора относительно оси, перпендикулярной опорной поверхности. Для этого координатный манипулятор содержит корпус с датчиками поворота, несколькими двухкоординатными колесоподобными элементами, подвешенными на корпусе и соприкасающимися с опорной поверхностью. Двухкоординатные колесоподобный элемент содержит остов-раму с осью, опорные тела вращения, установленные на остове-раме с возможностью поворота относительно своих осей вращения. 2 с. и 3 з.п. ф-лы, 9 ил.
| ТРЕХКООРДИНАТНЫЙ МАНИПУЛЯТОР ГРАФИЧЕСКОЙ ИНФОРМАЦИИ "ЧЕРЕПАХА" | 1997 |
|
RU2123201C1 |
| "Манипулятор графической информации типа "Мышь" | 1989 |
|
SU1737473A1 |
| RU 94031438 A1, 20.08.1996 | |||
| RU 2004930 C1, 15.12.1993 | |||
| Графический шаровой манипулятор | 1989 |
|
SU1674187A1 |
| US 5619231 А, 06.04.1997 | |||
| US 5521617 A, 28.05.1996. | |||

