Изобретение относится к устройствам вычислительной техники и может быть использовано для ввода информации в компьютер. На настоящий момент известны различные конструкции манипуляторов типа "мышь", отличающиеся друг от друга типом используемых датчиков (механические, оптико-механические, оптические), количеством клавиш ввода (1, 2, 3, 4, 41), различной разрешающей способностью и т.д. Конструкции этих манипуляторов описаны, например, в [1] У.Ньюмен, Р. Спрулл. Основы интерактивной машинной графики. - М.: Мир, 1976, с. 184-185, рис. 9.4 (W. Newman, R.Sproull. Principles of Interactive Computer Graphics. McCraw-Hill Book Company, 1973.). [2] Воробьев Н.В., Безобразов В. С. Графический манипулятор типа "Мышь" для персональных ЭВМ. Микропроцессорные средства и системы, 1988, N 3, с. 57-59, рис. 1. [3] Файнберг В. Новые "мыши" - безделушка или реальность? "Компьютер-Пресс", 1990, N 8, с. 18-20. [4] C. Smith. Input Devices. PC WORLD, 1992, Vol. 10, N 5, p. 140-147. Olson, L. T. Inertial mouse system. Patent US 4787051, Nov. 22, 1988. [5] Lawrence, James G.; Diaz, Oscar R.; Erdmann (Jr.), Robert E. Point and select device. Patent US 4939508A, July 07, 1990 (Oct. 31, 1988). [6] Glynn, B. J. Computer apparatus input device for three-dimensional information. Patent US 5181181, Sep. 27, 1990. [7] Gorniak, A.M. System and apparatus for providing three dimensions of input into a host processor. Patent US 4961138, Oct. 2, 1990.
Недостатками этих устройств являются либо отсутствие возможности учета угла поворота манипулятора "мышь", либо высокая сложность. Известна конструкция манипулятора "мышь", описанная в изобретении по патенту RU 2123201. Устройство содержит двух- и однокоординатный датчики перемещения, при этом последний регистрирует линейное перемещение относительно опорной поверхности в направлении, перпендикулярном проходящей через датчики прямой. При движении манипулятора по опорной поверхности датчики выдают информацию о величинах и направлениях перемещений, выходы датчиков являются выходом устройства. Поступательная компонента движения манипулятора в его системе координат определяется измерениями от двухкоординатного датчика, а вращательная - разностью измерений однокоординатного датчика и одной из координат двухкоординатного датчика. Вычисление необходимой разности осуществляется дополнительной командой в программе компьютера, использующего данный манипулятор. Недостатком этого устройства является необходимость использования двухкоординатного датчика, что может усложнять устройство.
Задача упрощения манипулятора, позволяющего определять как поступательные, так и вращательные движения манипулятора, решена в данном изобретении путем использования в манипуляторе только нескольких независимых однокоординатных датчиков, каждый из которых измеряет компоненту перемещения некоторой связанной с датчиком "точки измерения" на опорной поверхности вдоль некоторого связанного с датчиком "направления измерения", параллельного опорной поверхности, и нечувствителен к компоненте перемещения точки измерения в направлении, перпендикулярном направлению измерения. При использовании в устройстве не менее 3-х однокоординатных датчиков и при условии, что направления измерения этих датчиков не пересекаются в одной точке и не все направления измерения параллельны, по измерениям этих датчиков возможно вычислить как поступательную, так и вращательную компоненты движения манипулятора.
Покажем принципиальную возможность вычисления компонент поступательного движения и поворота манипулятора по показаниям однокоординатных датчиков манипулятора для случая, когда использованы 3 однокоординатных датчика. Будем считать, что выполнены 2 условия: (1) направления измерения 1-го и 2-го датчиков не параллельны, (2) направления измерения 3-х датчиков не пересекаются в одной точке. Построения поясняются на фиг. 1.
Пусть в системе координат, связанной с манипулятором, точки измерения 1-го, 2-го и 3-го однокоординатных датчиков характеризуются радиус-векторами  соответственно (это двумерные вектора). Пусть единичные векторы направлений измерения однокоординатных датчиков -
соответственно (это двумерные вектора). Пусть единичные векторы направлений измерения однокоординатных датчиков -  Пусть ds1, ds2, ds3 - показания (либо приращения показаний) этих датчиков при малом перемещении манипулятора.
Пусть ds1, ds2, ds3 - показания (либо приращения показаний) этих датчиков при малом перемещении манипулятора.
Пусть  - произвольная фиксированная относительно манипулятора в данный момент времени точка опорной поверхности. Поскольку в силу вышеуказанных свойств однокоординатного датчика i-й датчик измеряет проекцию перемещения точки измерения
- произвольная фиксированная относительно манипулятора в данный момент времени точка опорной поверхности. Поскольку в силу вышеуказанных свойств однокоординатного датчика i-й датчик измеряет проекцию перемещения точки измерения  относительно опорной поверхности на направление
относительно опорной поверхности на направление  то для любого i имеет место соотношение
то для любого i имеет место соотношение  где
где  - проекция указанного векторного произведения на ось, перпендикулярную опорной поверхности,
- проекция указанного векторного произведения на ось, перпендикулярную опорной поверхности,  - перемещение точки
- перемещение точки  относительно опорной поверхности в системе координат, связанной с манипулятором, dω - поворот манипулятора относительно оси, перпендикулярной опорной поверхности. <..., ...> обозначает скалярное, а (... х ...) - векторное произведение векторов.
относительно опорной поверхности в системе координат, связанной с манипулятором, dω - поворот манипулятора относительно оси, перпендикулярной опорной поверхности. <..., ...> обозначает скалярное, а (... х ...) - векторное произведение векторов.
Выберем в качестве точки  точку пересечения двух прямых, одна из которых проходит через
точку пересечения двух прямых, одна из которых проходит через  в направлении
в направлении  , а другая проходит через
, а другая проходит через  в направлении
в направлении  Тогда получаем уравнения
Тогда получаем уравнения
Обозначим Φij - угол между  и
и  , то есть
, то есть  Тогда из предыдущего уравнения получаем
Тогда из предыдущего уравнения получаем
Таким образом, выше получено (с точностью до обозначений), что
где  l1, l2, l3 - фиксированные для данного манипулятора параметры, определяемые размещением и ориентацией колесных датчиков.
l1, l2, l3 - фиксированные для данного манипулятора параметры, определяемые размещением и ориентацией колесных датчиков.
Если Oxy - связанная с манипулятором система координат в опорной плоскости, то могут быть вычислены величины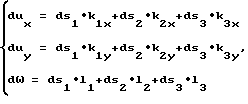
где dux и duy - составляющие поступательного движения точки  манипулятора в системе координат Oxy, dω - элемент вращательного движения манипулятора относительно оси, перпендикулярной опорной поверхности; k1x, k1y, k2x, k2y, k3x, k3y, l1, l2, l3 - фиксированные для данного манипулятора константы, определяемые размещением и ориентацией колесных датчиков на манипуляторе, а также выбором системы координат.
манипулятора в системе координат Oxy, dω - элемент вращательного движения манипулятора относительно оси, перпендикулярной опорной поверхности; k1x, k1y, k2x, k2y, k3x, k3y, l1, l2, l3 - фиксированные для данного манипулятора константы, определяемые размещением и ориентацией колесных датчиков на манипуляторе, а также выбором системы координат.
Таким образом, каждая из компонент движения манипулятора - поступательного по опорной поверхности и поворота относительно оси, перпендикулярной опорной поверхности, - может быть вычислена умножением показаний датчиков на некоторые коэффициенты и последующим суммированием. Эти вычисления могут быть выполнены, например, в программе компьютера, с которым используется манипулятор, либо в микроконтроллере, встроенном в сам манипулятор, поскольку команды умножения на число и сложения чисел входят в состав всех распространенных средств программирования микропроцессоров.
В случае, если в манипуляторе используются более 3-х однокоординатных датчиков, вычисление компонент перемещения манипулятора может производиться, например, следующим образом. Для всех различных троек датчиков, для которых выполнены условия, что направления измерения этих датчиков не пересекаются в одной точке и не все направления измерения параллельны, по измерениям этих датчиков возможно производить вычисления поступательной и вращательной компонент перемещения манипулятора. По получаемым для каждой из таких троек значениям можно вычислять средние поступательную и вращательную компоненты перемещения манипулятора.
Одно из возможных инженерных решений представлено на фиг. 2. Устройство состоит из трех дисков 1, 3, 5 на осях, подвешенных в корпусе 7, и трех датчиков регистрации вращения дисков (например, оптических или контактных) 2, 4, 6. Оси вращения дисков не перпендикулярны опорной поверхности. Каждая из пар элементов (1, 2), (3, 4), (5, 6) образует однокоординатный датчик перемещения, в котором диск фрикционно связан с опорной поверхностью, вращение диска с учетом направления регистрируется датчиками регистрации вращения диска. При этом направлением измерения получаемого таким образом однокоординатного датчика является лежащий в плоскости опорной поверхности перпендикуляр к оси вращения диска, а точкой измерения является точка соприкосновения диска с опорной поверхностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР "САМОХОДНАЯ ЧЕРЕПАХА ПРОХОРОВА WONDERTURTLE" (ВАРИАНТЫ) | 1999 |
|
RU2197746C2 |
| МАНИПУЛЯТОР "ЧЕРЕПАХА ПРОХОРОВА" | 1999 |
|
RU2180134C2 |
| МАНИПУЛЯТОР "ЧЕРЕПАХА ПРОХОРОВА" (ВАРИАНТЫ), "КОЛЕСО ПРОХОРОВА", ФРИКЦИОННЫЙ КОМПАС | 1999 |
|
RU2234128C2 |
| ТРЕХКООРДИНАТНЫЙ МАНИПУЛЯТОР ГРАФИЧЕСКОЙ ИНФОРМАЦИИ "ЧЕРЕПАХА" | 1997 |
|
RU2123201C1 |
| СПОСОБ И УСТРОЙСТВО ПАССИВНОГО УПРАВЛЕНИЯ | 2007 |
|
RU2377626C2 |
| МАНИПУЛЯТОР ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОННЫМИ УСТРОЙСТВАМИ/КОМПЬЮТЕРОМ | 2013 |
|
RU2542369C1 |
| Модуль промышленного робота | 1979 |
|
SU831606A1 |
| УСТРОЙСТВО ВВОДА КООРДИНАТ | 2017 |
|
RU2669093C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МАНИПУЛЯТОРОМ ТИПА "ПРОСТРАНСТВЕННАЯ МЫШЬ" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2480813C1 |
| СПОСОБ УПРАВЛЕНИЯ КУРСОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2275674C2 |

Изобретение относится к области периферийных устройств ЭВМ и может быть использовано для ввода информации в компьютер. Техническим результатом является упрощение конструкции манипулятора, обеспечивающего ввод дополнительной угловой координаты поворота относительно опорной поверхности. Сущность изобретения заключается в следующем. Трехкоординатный манипулятор содержит не менее трех однокоординатных датчиков перемещения, каждый из которых регистрирует линейное перемещение относительно опорной поверхности. Вычисление вращательной и поступательной компонент движения манипулятора в его системе координат или в системе координат, связанной с опорной поверхностью, осуществляется программой компьютера или контроллером, обслуживающим манипулятор, на основе показаний однокоординатных датчиков перемещения. 1 з.п. ф-лы, 2 ил.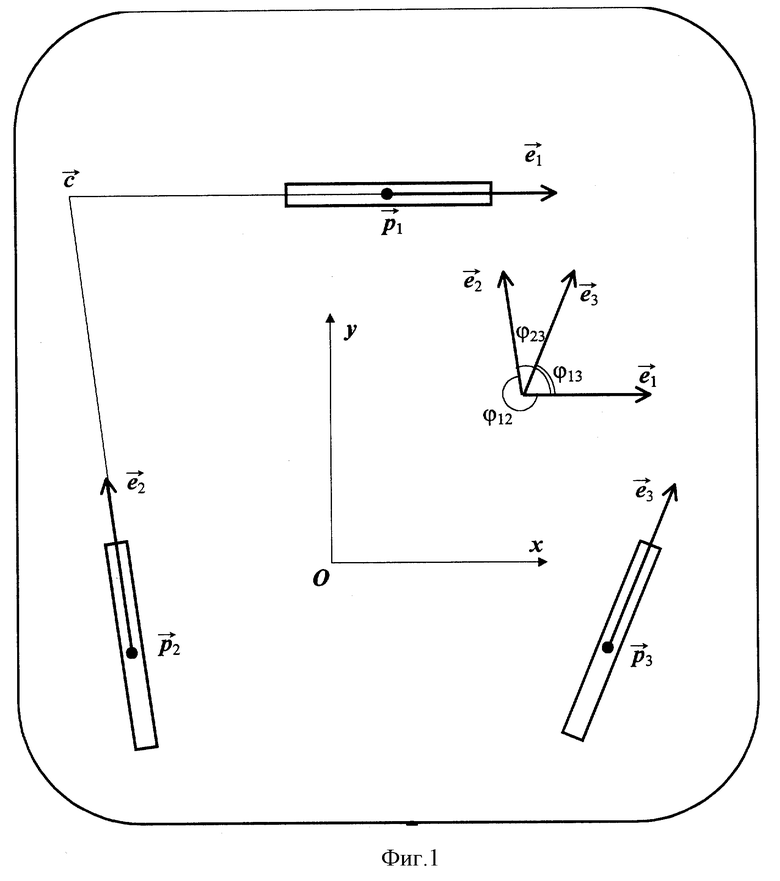
| ТРЕХКООРДИНАТНЫЙ МАНИПУЛЯТОР ГРАФИЧЕСКОЙ ИНФОРМАЦИИ "ЧЕРЕПАХА" | 1997 |
|
RU2123201C1 |
| RU 2004930 С1, 15.12.1993 | |||
| УСТРОЙСТВО для УЛАВЛИВАНИЯ ГАЗОВ ПРИ ИЗВЛЕЧЕНИИ, ТРАНСПОРТИРОВКЕ И ОЧИСТКЕ АПОДНЫХ ШТЫРЕЙ | 0 |
|
SU403782A1 |
| JP 05324190 A, 07.12.1993 | |||
| EP 0489469 А1, 29.11.1991. | |||

