Изобретение относится к способу и устройству для обнаружения присутствия людей в оборудованных секциями крепи очистных забоях в подземной горной выработке, причем по меньшей мере части секций крепи приданы датчики сбора информации, соединенные с устройствами управления секциями крепи, причем датчики сбора информации сканируют по меньшей мере рабочий и эксплуатационный участок приданных секций крепи и останавливают их в процессе движения и соответственно не разрешают движение приданных секций крепи, когда на участке сбора информации датчиков обнаружено присутствие человека. Кроме того, изобретение относится к устройству для обнаружения присутствия людей в оборудованных секциями крепи очистных забоях в подземной горной выработке, причем по меньшей мере части секций крепи приданы датчики сбора информации, соединенные с устройствами управления секциями крепи и сканирующие по меньшей мере рабочий и эксплуатационный участок приданных секций крепи.
В современной добыче угля или других полезных ископаемых в подземных горных выработках добыча производится добычной машиной, совершающей в очистном забое возвратно-поступательное движение между двумя штреками, например врубовой машиной или струговой установкой, причем висячий бок в очистном забое подпирается и поддерживается несколькими установленными параллельно друг другу секциями крепи, которые обычным способом соединены с конвейером для вывоза добытого угля или материалов из очистного забоя, вдоль которого перемещается также добычная машина. После прохождения добычной машины конвейеры и секции крепи продвигаются в направлении к линии очистного забоя, для чего после передвижки конвейера отдельные секции крепи одна за другой заводят (выбивают) на некоторое расстояние, затем они с помощью шагового цилиндра передвигаются (совершают передвижку) в направлении к конвейеру и в заключение верхняк висячего бока снова выводится до тех пор, пока не будет достигнуто заданное опорное давление и висячий бок не будет надежно подперт (посажен). Принцип работы такой шагающей крепи достаточно известен из уровня техники.
В современной крепи каждая секция снабжена собственной системой электрического и электрогидравлического управления, причем элементы управления могут быть соединены между собой для обмена информацией, вследствие чего зависимые процессы движения могут осуществляться на нескольких установленных рядом друг с другом щитах. Различные перемещения секции крепи могут включаться автоматически с пульта управления более высокого уровня и осуществляться самостоятельно, но можно также перемещать выбранную секцию крепи вручную с помощью клавиатуры устройства управления, причем в данном случае вручную приводится в действие устройство управления, установленное не на самой передвигаемой секции крепи, а установленное на соседней секции крепи, устройство управления, которое управляющей линией соединено с устройством управления передвигаемой секции крепи (управление по принципу смежности).
Перемещение секции крепи, то есть заведение (выбойка) верхняка крепи, передвижка в направлении к забойному конвейеру и повторное выдвигание верхняка висячего бока (посадка) разрешаются только тогда, когда на рабочем и эксплуатационном участке соответствующей секции крепи нет людей во избежание нанесения вреда человеку. Под термином рабочий и эксплуатационный участок в данном случае следует понимать участок, ограниченный верхняком висячего бока, лежачим боком, задним щитом завальной стороны секции крепи и установленным перед ним забойным конвейером, то есть тот участок очистного забоя, который поддерживается секцией крепи. Во избежание перемещения секции крепи, когда на этом опасном участке находятся люди, можно применять устройства и способы контроля, которые разрешают выбойку, передвижку и посадку секций только тогда, когда это не угрожает людям.
Из заявки на патент DE-OS 3627174 известен родовой способ и устройство вышеуказанного типа, в котором датчики сбора информации установлены на секциях крепи, причем каждый датчик передает непрерывный сигнал с целью контроля соответствующего участка. В известном способе каждый человек в очистном забое носит приемоответчик, то есть небольшое приемопередающее устройство, взаимодействующее с датчиками сбора информации на отдельных секциях крепи и обнаруживаемое датчиком тогда, когда человек находится на участке сбора информации соответствующего датчика. Как только датчик получает от приемоответчика сигнал, он выдает на устройство управления секцией крепи управляющий сигнал, под действием которого устройство управления секцией крепи, в которой находится человек, отменяет обычные функции управления и запрещает передвижение секции до тех пор, пока человек находится в рабочей и эксплуатационной зоне.
Известное устройство и известный способ имеют тот недостаток, что все датчики сбора информации в очистном забое включены постоянно, вследствие чего необходимо относительно высокое потребление электроэнергии, которое должно покрываться сложными самозащищенными цепями тока. Вследствие постоянного состояния включения всех датчиков в забое все носимые каждым человеком приемоответчики также постоянно включены и потребляют много электроэнергии, которую необходимо покрывать переносными источниками электроэнергии (батарейками, аккумуляторами) и которая при минимальной продолжительности работы 10 часов относительно велика и затруднительна для осуществления. Кроме того, датчики сбора информации в известном способе и в известном устройстве постоянно передают электромагнитные сигналы, которые при длительном действии всех датчиков приводят к значительному электромагнитному смогу в забое, который может воздействовать на здоровье работающих в забое людей и влиять на их способность к концентрации, что угрожает безопасности горняков. Кроме того, вследствие постоянного действия всех датчиков и передаваемых ими электромагнитных волн могут быть неправильные включения, если передаваемые одним датчиком электромагнитные сигналы, возможно, после неоднократного отражения и т.п. искажаются и неправильно интерпретируются другим датчиком сбора информации в качестве сигнала приемоответчика и приводят к останову секции крепи, на рабочем эксплуатационном участке которой нет горняка и которая могла бы поэтому безопасно перемещаться.
Задачей изобретения является создание способа и устройства вышеуказанного типа, в которых устраняется электромагнитный смог в очистном забое, вызванный датчиками сбора информации, причем по возможности уменьшается потребность в электроэнергии не только датчиков сбора информации, но и, возможно, носимых контролируемыми людьми приемоответчиков.
Данная задача решается способом согласно изобретению благодаря тому, что датчики сбора информации могут включаться устройствами управления приданными секциями крепи и включаются перед запланированным перемещением секции крепи и снова выключаются по окончании перемещения. В соответствии с этим устройство согласно изобретению отличается тем, что датчики сбора информации могут включаться и выключаться устройствами управления приданными секциями крепи.
Таким образом, в соответствии с изобретением датчики сбора информации в очистном забое включаются устройствами управления приданными датчиками секций крепи только тогда, когда вскоре предстоит перемещение секции крепи. Обычно за пять секунд до начала процесса перемещения щита выдается предупредительный сигнал. Приблизительно в тот же момент включается также приданный подвижной секции крепи датчик сбора информации, который после его включения сканирует рабочий и эксплуатационный участок соответствующей секции крепи для того, чтобы определить, находится ли человек на опасном участке. Датчик остается включенным столько времени, пока процесс перемещения (выбойка, передвижка, посадка) секции крепи не закончится полностью, и затем снова выключается соответствующим устройством управления. Следовательно, в соответствии с изобретением приданные секциям крепи датчики сбора информации большей частью выключены и включаются только тогда, когда необходимо переместить секцию. Благодаря такому селективному управлению отдельными датчиками потребность в электроэнергии устройства контроля лишь незначительна и нагрузка на горняков от электромагнитного смога совершенно незначительна или вообще отсутствует.
Целесообразно каждой секции крепи придан по меньшей мере один собственный датчик сбора информации, но можно также установить датчики сбора информации только на каждой второй секции крепи, причем участок сбора информации датчиков будет по размерам таким, что тем самым будет охвачен слежением рабочий и эксплуатационный участок соответственно двух соседних секций крепи.
Сканирование рабочих и эксплуатационных участков секций крепи производится предпочтительно методом активной/пассивной маркировки, при котором находящиеся в очистном забое люди экипированы приемоответчиком, который сам включается включенным датчиком сбора информации, когда человек попадает в сканированную зону датчика сбора информации или находится в ней, и который затем передает на датчик сбора информации сигнал о присутствии человека, в результате чего датчик сбора информации выдает в устройство управления сигнал останова. Так как в данном варианте осуществления изобретения носимый горняком, например, на каске или на поясе приемоответчик включается только тогда, когда горняк находится в рабочей и эксплуатационной зоне секции крепи, которая вскоре будет перемещаться, и соответственно этому только в этом сравнительно редком случае вообще выдает сигнал о присутствии, потребность приемоответчика в электроэнергии незначительна, так как он находится большее время в режиме готовности, потребляя незначительное количество электроэнергии. Поэтому достаточно предусмотреть для электроснабжения приемоответчика небольшую и тем самым легкую по весу батарею или аккумулятор.
В предпочтительном варианте осуществления способа согласно изобретению датчики сбора информации сканируют свой соответствующий участок сбора информации циклично с продолжительностью цикла не более 0,2 секунды. Целесообразная продолжительность цикла сканирования составляет 10-100 миллисекунд. Это означает, что человек, входящий на участок сбора информации датчика и тем самым в рабочую и эксплутационную зону соответствующей секции крепи, обнаруживается в течение очень короткого времени, в любом случае менее 0,2 секунды, и о присутствии человека извещается путем выдачи сигнала останова в систему управления так, что уже находящаяся в движении секция крепи может остановиться в доли секунды для того, чтобы не подвергать опасности попавшего на опасный участок человека.
Особенное преимущество имеет вариант выполнения изобретения, поскольку он прост, тогда, когда генерированные датчиками сбора информации сигналы представляют собой сигналы постоянного напряжения с разным значением напряжения, причем сигналы постоянного напряжения разного значения могут легко регистрироваться и анализироваться, и посредством надлежащих устройств составления протоколов возможно без затруднений также протоколирование не только сигналов останова и отпирающих сигналов, выданных датчиками сбора информации, но и сигналов, выданных от настроенных режимов работы и т.п.
Участок сбора информации каждого датчика сбора информации охватывает предпочтительно рабочий и эксплуатационный участок приданной секции крепи и по меньшей мере часть рабочих и эксплуатационных участков соответствующих соседних секций крепи. Датчик сбора информации может тем самым не только констатировать факт нахождения человека в соответствующей секции крепи, которая должна продвигаться или уже продвигается, но и определять, перемещается ли человек в направлении к движущейся или готовой к передвижке секции и возможно вскоре окажется на рабочем и эксплуатационном участке этой секции, так что ее движение может быть предотвращено или остановлено до входа человека на собственно опасный участок.
Предпочтительно датчики сбора информации проводят циклично самоконтроль, а именно из соображений целесообразности только тогда, когда после включения датчика сбора информации и сканирования своего участка сбора информации человек не обнаружен. Благодаря самоконтролю датчиков аварийные состояния быстро обнаруживаются и могут сообщаться в систему управления секцией крепи и индицироваться с помощью устройства индикации, например светодиода.
Датчики сбора информации можно настроить на разного размера рабочие и эксплуатационные участки секций крепи, благодаря чему надежно устраняются искаженные сообщения датчика, которые иначе могут иметь место вследствие несоответствия датчика высоте, ширине и глубине секции крепи. Целесообразно датчики сбора информации установлены в защитных корпусах, в которых они защищены от суровых условий эксплуатации в подземных выработках. Для предотвращения опасности взрыва рудничного газа датчики сбора информации имеют возможность работать в самозащищенном диапазоне мощности, что известно и широко применяется при подземных горных работах. Датчики сбора информации могут устанавливаться, например, на стойках секций крепи или на верхняках висячего бока.
Особенно предпочтительно, когда датчики сбора информации состоят в основном из передающего и приемного блоков, причем передающий блок передает сигнал для включения носимого человеком приемоответчика на участке сбора информации и приемный блок принимает передаваемый включаемым таким образом приемоответчиком сигнал, который затем передается в контрольное устройство щита, которое анализирует и передает его в электронную систему управления соответствующей секции крепи в виде управляющего сигнала для прекращения движения щита.
Особенно предпочтительным и целесообразным вариант выполнения изобретения является тогда, когда передающий блок имеет магнитную антенную систему с двумя установленными параллельно ферритовыми спиральными антеннами, причем обе ферритовые спиральные антенны соединены предпочтительно каждая последовательно с конденсатором. В этом случае расположенные целесообразно рядом друг с другом ферритовые спиральные антенны генерируют общее дополняющее и усиливающее магнитное поле с несколько эллиптическим в плоскости растяжением, большая полуось которого проходит между двумя антеннами и параллельно им и меньшая полуось которого проходит поперечно продольному направлению антенн. Тем самым поле можно согласовать с формой горизонтальной проекции соответствующей секции крепи так, что соответственно одним передающим блоком можно полностью контролировать скорее более длинную, чем широкую секцию крепи, не охватывая, однако, секции в непосредственной близости. При этом продольное направление ферритовых спиральных антенн проходит, разумеется, несколько поперечно продольному направлению очистного забоя. Для оптимального согласования обеих антенн с габаритами соответствующей секции крепи целесообразно установить антенны на секции крепи с регулируемым промежутком между собой.
Приемный блок предпочтительно имеет три установленные под углом друг к другу приемные катушки, которые тем самым в состоянии принимать переданный приемоответчиком только одномерный сигнал присутствия надежно и независимо от того, в каком направлении приемоответчик излучает в действительности сигнал присутствия. Для этого три приемные катушки приемного устройства установлены предпочтительно под прямым углом друг к другу.
Подобным же образом, как и датчики сбора информации, могут быть установлены приемоответчики и иметь каждый приемное устройство и передающий элемент, который во время приема приемным устройством сигнала, переданного передающим блоком, включается от него. Приемное устройство имеет в данном случае три отдельных приемника, расположенных под углом друг к другу, которые предпочтительно расположены под прямым углом друг к другу.
Для практических целей выявилось особое преимущество в том случае, когда ферритовые спиральные антенны передающего блока работают с частотой 7-11 кГц. Испытания с частотой 9 кГц показали особенно хорошие результаты.
Для получения необходимой эллиптической формы поля ферритовые спиральные антенны устанавливаются на секции крепи лучше всего с промежутком 100-180 мм между собой, при заданных размерах горизонтальной проекции секции крепи около 4×1,5-2 м целесообразным оказался промежуток, равный 120-150 мм.
Генерированный включенным передающим устройством приемоответчика сигнал присутствия выдается предпочтительно с частотой 1,5-2 МГц. При испытании особенно практичной оказалась частота 2 МГц, которая вполне высокая, чтобы исключить влияние других электронных компонентов под землей, с другой стороны, еще достаточно низкая, чтобы генерировать необходимое магнитное поле.
Другие признаки и преимущества изобретения следуют из последующего описания и чертежей, причем предпочтительная форма выполнения изобретения поясняется более подробно на примере, в котором:
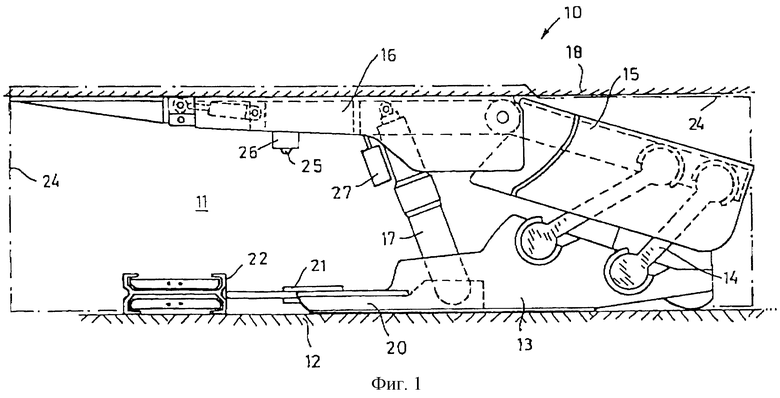
фиг.1 показывает вид сбоку одной из нескольких установленных в очистном забое рядом друг с другом секций крепи с устройством согласно изобретению для осуществления способа согласно изобретению;
фиг.2 показывает схематический вид сверху на часть забоя с секциями крепи по фиг.1 в уменьшенном масштабе;
фиг.3 показывает блок-схему предпочтительного варианта выполнения примененного в изобретении датчика сбора информации;
фиг.4 показывает антенную систему передающего блока датчика сбора информации по фиг.3; и
фиг.5 показывает предпочтительный вариант выполнения приемоответчика, носимого человеком.
Для более лучшего понимания изобретения дается ссылка на выложенное описание изобретения к неакцептованной заявке ФРГ (DE-OS) 3627174 и на соответствующее выложенное описание к неакцептованной заявке Великобритании 85/21813, которое тем самым определенно включено в объем раскрытия настоящей заявки.
На фиг.1 показана секция крепи, являющаяся составной частью подземной шагающей забойной крепи, применяемой при добыче угля и других полезных ископаемых в современной подземной выработке. Для возведения крепи очистного забоя в очистном забое 11 устанавливаются рядом друг с другом несколько секций крепи 10, как это схематически показано в горизонтальной проекции на фиг.2.
Секции крепи известным образом состоят по существу из секции 13 крепи, расположенной по лежачему боку 12, щита 15 на завальной стороне, шарнирно соединенной с ней профилированной по лемнискате передачей 14, и также соединенного с ним шарнирно верхняка 16 висячего бока, который через опорный цилиндр 17 опирается на секцию крепи, расположенную по лежачему боку и который подпирается висячим боком 18. На переднем, обращенном к линии очистного забоя 19 участке 20 секции 13 крепи, расположенной по лежачему боку, он соединен через лишь показанный цилиндр для передвижки 21 с забойным конвейером 22, вдоль которого может перемещаться также добычная машина 23, показанная на фиг.2 в виде комбайна с барабанным исполнительным органом, и который при прохождении очистного забоя известным способом производит на линии очистного забоя выемку угля, который затем вывозится забойным конвейером 22. После прохождения добычной машины 23 мимо секции 10 крепи забойный конвейер 22, состоящий из отдельных секций желоба и, следовательно, выполненный шарнирным в продольном направлении, тем самым известным способом продвигается цилиндрами 21 для передвижки секций крепи вперед в направлении к линии очистного забоя 19, как это указано на фиг.2 в секции крепи, показанной позицией 10d. Затем также известным способом секции крепи одна за другой посредством ввода опорных цилиндров 17 и тем самым опускания верхняка по висячему боку 16 выбиваются из висячего бока 18, продвигаются посредством заведения опорного цилиндра 21 вперед в направлении к линии очистного забоя 19 (передвижка) и затем посредством выдвигания опорных цилиндров 17 снова устанавливаются в новом положении. Принцип работы такой шагающей крепи достаточно известен и поэтому не требует в данном случае более подробного пояснения.
Во избежание несчастных случаев с нанесением ущерба персоналу, которые могут произойти, когда люди находятся на рабочем и эксплуатационном участке 24, ограниченном верхняком по висячему боку 16, секцией крепи 13, расположенной по лежачему боку, и задним щитом на завальной стороне 15, когда секция крепи совершает одно из своих движений для выбойки, передвижки или посадки, секции крепи 10 снабжены устройством для сбора информации о присутствии людей, которое является предметом настоящего изобретения. С этой целью все секции крепи имеют датчики сбора информации 25, установленные в защитных корпусах 26 на нижней стороне верхняков по висячему боку 16. Датчики сбора информации соединены управляющими линиями 31 с отдельными устройствами управления 27, которые схематически показаны на фигурах. Устройства управления отдельных секций крепи также соединены между собой кабелями цепи управления, как это показано на фиг.2 штриховыми линиями 28 и как это известно в системах управления забойными крепями.
Приданные отдельным секциям 10a)-f) датчики сбора информации 25a)-f) состоят из приемопередающего устройства, которое включается и выключается соответствующими индивидуальными устройствами управления 27. Принцип действия при этом таков, что датчики сбора информации различных секций крепи 10, установленных в очистном забое 11 рядом друг с другом, действуют не постоянно, а работают датчики только тех секций крепи, которые совершают или вскоре будут совершать одно из своих движений (выбойка, передвижка, посадка). Такая ситуация лучше всего видна на фиг.2.
В изображенных на фиг.2 секциях крепи 10a)-f) обе изображенные слева секции 10а) и b) уже установлены в свое новое, перемещенное вперед в направлении к линии очистного забоя 19 положение. Их датчики сбора информации 25а) и 25b) не включены, поэтому они не срабатывают на присутствие человека на рабочем участке 24 этих секций. В следующей секции крепи 10с), которая должна передвигаться вперед в направлении к линии очистного забоя 19 следующей и снова устанавливаться там, датчик сбора информации 25с) включен соответствующим устройством управления 27с), что показано излучаемыми датчиком сигнальными волнами 29. Участок сбора информации датчика 25с) показан на фиг.2 позицией 30 штрих-пунктирными линиями и не только полностью перекрывает рабочий и эксплуатационный участок 24с) секции крепи 10с), но охватывает также часть рабочих и эксплуатационных участков 24b) и 24d) соседних секций крепи.
Датчик сбора информации 25с) включается приданным устройством управления 27 приблизительно за три-пять секунд до момента, когда секция должна приводиться в движение посредством введения верхняка висячего бока. Следовательно, датчик сбора информации 25с) за три-пять секунд до предусмотренного процесса выбойки начинает сканировать участок сбора информации 30, чтобы определить, находится ли на рабочем и эксплуатационном участке 24с) передвигаемой секции крепи или на участках перехода в соседние секции крепи человек, которому может угрожать опасность, вызываемая движением секции. Если датчик сбора информации определяет присутствие человека, он передает в индивидуальное устройство управления сигнал останова, который не разрешает или немедленно останавливает движение секции, если человек находится на участке сбора информации 30 датчика.
Датчик сбора информации 25с) остается включенным до тех пор, пока не закончится весь процесс движения при выбойке, передвижке и новой посадке секции крепи. При этом датчик сканирует рабочий и эксплуатационный участок щита и частично соседних щитов циклично с небольшой продолжительностью цикла, равной около 20 миллисекунд, и по истечении каждого цикла сканирования передает в систему управления 27 новый сигнал, представляющий собой или отпирающий сигнал, когда на опасном участке не обнаружено присутствие человека, или сигнал останова для немедленного прекращения процесса движения, когда во время выбойки, передвижки или посадки на участке сбора информации датчика появляется человек.
Как только секция крепи дошла до своего нового переднего положения и, как передвинутые ранее секции 10а) и 10b), посажена в новом положении, датчик сбора информации этой секции выключается и, следовательно, более не сканирует вновь установленную секцию.
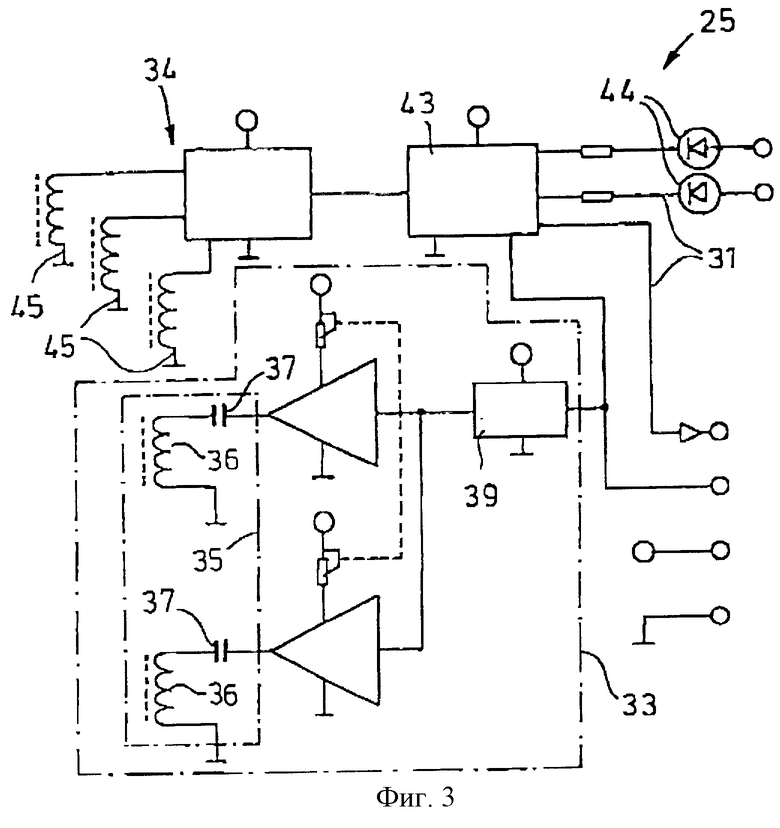
На фиг.3-5 представлен схематически особенно предпочтительный вариант выполнения датчика сбора информации 25 и приемоответчика 32 (фиг.5). Как следует из фиг.3, датчик сбора информации состоит по существу из передающего блока 33 и приемного блока 34, причем передающий блок начинает передавать сигнал приблизительно за три-пять секунд до передвижки соответствующей секции крепи, который может быть принят приемоответчиком (32 на фиг.5), носимым человеком, находящимся на участке сбора информации. Переданный передающим блоком сигнал включает затем приемоответчик, который после этого сам передает сигнал, принимаемый приемным блоком датчика сбора информации.
Как видно на фиг.3 и 4, передающий блок имеет магнитную антенную систему 35 с двумя установленными параллельно, включенными синфазно ферритовыми спиральными антеннами 36, каждая из которых соединена последовательно с конденсатором 37. Расположенные рядом друг с другом ферритовые спиральные антенны 36 установлены на верхняке висячего бока соответствующей секции крепи 10 приблизительно горизонтально, то есть параллельно верхняку так, что их продольное направление проходит в направлении к линии очистного забоя. Как показывает фиг.4, обе расположенные с промежутком приблизительно 120-150 мм друг от друга ферритовые спиральные антенны 36 генерируют общее дополняющее и магнитно-усиливающееся поле 38, имеющее в разрезе приблизительно эллиптическую форму,  полуось которой проходит в продольном направлении катушки 36. Создаваемое перекрыванием силовых линий поля усиление поля достигается при этом по существу с одинаковой потребностью в электроэнергии, которую имеет и отдельная ферритная спиральная антенна, имеющая приблизительно круговой участок сканирования и сбора информации, как это обозначено позицией 30 на фиг.2. Предпочтительная эллиптическая форма поля 38 имеет особое преимущество, заключающееся в том, что форма поля с большей длиной по сравнению с шириной согласована с формой горизонтальной проекции соответствующей секции крепи 10, которая в направлении передвижки имеет длину также больше ширины, проходящей в направлении к очистному забою. Тем самым только одним датчиком сбора информации может быть сканирован весь рабочий и эксплуатационный участок 24 соответствующего щита лишь с небольшим перекрытием соответствующего участка непосредственно соседнего щита, что также имеет то преимущество, что при передвижке секции крепи человек может находиться также на соседнем щите, например, для того, чтобы оттуда вручную управлять соседним щитом с помощью системы управления по принципу смежности или собственными глазами наблюдать за автоматическим процессом выбойки, передвижки и посадки.
полуось которой проходит в продольном направлении катушки 36. Создаваемое перекрыванием силовых линий поля усиление поля достигается при этом по существу с одинаковой потребностью в электроэнергии, которую имеет и отдельная ферритная спиральная антенна, имеющая приблизительно круговой участок сканирования и сбора информации, как это обозначено позицией 30 на фиг.2. Предпочтительная эллиптическая форма поля 38 имеет особое преимущество, заключающееся в том, что форма поля с большей длиной по сравнению с шириной согласована с формой горизонтальной проекции соответствующей секции крепи 10, которая в направлении передвижки имеет длину также больше ширины, проходящей в направлении к очистному забою. Тем самым только одним датчиком сбора информации может быть сканирован весь рабочий и эксплуатационный участок 24 соответствующего щита лишь с небольшим перекрытием соответствующего участка непосредственно соседнего щита, что также имеет то преимущество, что при передвижке секции крепи человек может находиться также на соседнем щите, например, для того, чтобы оттуда вручную управлять соседним щитом с помощью системы управления по принципу смежности или собственными глазами наблюдать за автоматическим процессом выбойки, передвижки и посадки.
Генерируемое обеими ферритовыми спиральными антеннами 36 одномерное силовое поле представляет собой поле вызова, частота которого задается генератором частоты 39 и в предпочтительном варианте выполнения составляет 9 кГц. Для того чтобы в любом случае обеспечить включение приемоответчика от одномерного поля, когда он появляется на участке сбора информации датчика сбора информации, а именно независимо от его относительной ориентации в поле, он оснащен приемным устройством 40 с тремя индивидуальными приемниками 41, установленными под прямым углом друг к другу в элементе для обнаружения человека, носимом человеком, и тем самым позволяющими осуществлять оптимальный прием во всех направлениях трехмерной системы координат, что на фиг.5 должно быть обозначено осями координат X, Y и Z. Генерируемое передаточным блоком 33 датчика 25 силовое поле принимается затем приемным устройством приемоответчика, как только приемоответчик будет находиться на участке сбора информации 30, на котором сигнал поля достаточно силен, и включает затем передающий элемент 42 приемоответчика, который, со своей стороны, генерирует одномерное поле ответа с частотой предпочтительно около 2 МГц. Наличие этого поля ответа констатируется приемным блоком 34 датчика сбора информации 25, который выдает затем предупредительный сигнал в логическую схему 43, которая по линиям 31 системы управления выдает оптический сигнал тревоги на лампы предупредительной сигнализации (светодиоды) 44 и немедленно останавливает движение соответствующей секции крепи. Так как генерированное передаточным элементом поле ответа представляет собой также одномерное силовое поле, приемный блок датчика имеет также три приемные катушки 45, установленные в датчике под прямым углом друг к другу и тем самым постоянно надежно охватывающие поле ответа независимо от того, какую пространственную ориентацию занимает приемоответчик на участке секции крепи.
Очевидно, что согласно способу в соответствии с изобретением контроль очистного забоя с целью недопущения опасной ситуации для персонала со стороны шагающих секций крепи постоянно осуществляется только на участке, на котором действительно может иметь место опасность для горняка. Следовательно, в отличие от уровня техники электромагнитные волны избранных датчиков сканируют всегда только один небольшой отрезок очистного забоя, так что работающие в очистном забое горняки не подвержены постоянному электромагнитному смогу. Носимые горняками при применении так называемого активного/пассивного метода маркировки приемоответчики, которые со своей стороны включаются включаемым датчиком сбора информации и передают сигнал ответа в приемную часть датчика сбора информации, переключаются только тогда из режима готовности в режим передачи, когда носящий приемоответчик человек заходит на опасный участок, который сканируется датчиком секции крепи, которая уже находится в движении или вскоре начнет движение.
С целью дальнейшего повышения безопасности способа датчики сбора информации в конце цикла сканирования производят самоконтроль для того, чтобы гарантировать надлежащую работу датчика. Самоконтроль датчика сбора информации осуществляется тогда, когда после включения датчика и сканирования участка сбора информации на нем не обнаружено присутствие человека. Но если при сканировании обнаружено присутствие человека на рабочем и эксплуатационном участке секции крепи или на участке перехода к соседней секции крепи, то проведение самоконтроля не обязательно и датчик технического зрения передает сигнал останова, не проводя сравнения с результатом самоконтроля, непосредственно в устройство управления.
Результаты циклических неоднократных операций сканирования, переданные включенным датчиком сбора информации в соответствующее устройство управления, регистрируются и протоколируются в надлежащем, не изображенном запоминающем устройстве и позднее могут вызываться пользователем установки и анализироваться. Тем самым можно и впоследствии в случае ошибочной функции устройства контроля установить, что привело к ошибке и вызвало ошибочную функцию.
Изобретение не ограничивается представленным и описанным примером выполнения, а могут иметь место многие изменения и дополнения, не выходящие за рамки изобретения. Например, для контроля рабочего и эксплуатационного участка можно установить несколько индивидуальных датчиков в разных местах секции для оптимального контроля. При осуществлении способа согласно изобретению вполне возможно включать датчики сбора информации не только одной секции крепи, но и датчики обеих соседних секций, чтобы таким образом увеличить запрещенный участок, на котором во время движения секции не разрешено присутствие персонала. Решающим в изобретении является то, что не все датчики всех секций крепи в очистном забое включены одновременно, а работают только датчики на участке, на котором реально может возникнуть угроза нанесения вреда людям вследствие движения секций.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЮДЕЙ И/ИЛИ ПЕРЕДВИЖНЫХ МАШИН В ШАХТОВЫХ ПОЛОСТЯХ С ИСПОЛЬЗОВАНИЕМ RFID-ТЕХНОЛОГИИ И ИНЖЕНЕРНАЯ СИСТЕМА ВЫЕМКИ РУДЫ ИЗ ДЛИННОГО ОЧИСТНОГО ЗАБОЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ ДАННОГО СПОСОБА | 2011 |
|
RU2563859C2 |
| Механизированная крепь для слоевой выемки мощных крутых и наклонных пластов | 1989 |
|
SU1739048A1 |
| Устройство для перекрытия межсекционных зазоров в механизированных крепях | 1979 |
|
SU948296A3 |
| Способ управления механизированным комплексом в профильной плоскости пласта в направлении движения | 1978 |
|
SU775334A1 |
| СПОСОБ РАЗРАБОТКИ МОЩНЫХ КРУТОНАКЛОННЫХ УГОЛЬНЫХ ПЛАСТОВ И ЩИТОВОЕ ПЕРЕКРЫТИЕ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2069267C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ | 2014 |
|
RU2551557C1 |
| Способ подготовки горной выработки к переходу механизированным комплексом | 1982 |
|
SU1064006A1 |
| Секция механизированной крепи | 1975 |
|
SU605019A1 |
| Добычная установка для отработки мощных крутых пластов | 1980 |
|
SU948295A3 |
| КРЕПЬ АГРЕГАТНАЯ (ВАРИАНТЫ) | 1995 |
|
RU2130121C1 |



Изобретение относится к способу и средствам обеспечения безопасности людей в подземных горных выработках, оборудованных секциями крепи очистных забоев. Технический результат - снижение потребления электроэнергии и уменьшение негативного влияния на горняков электромагнитного смога, создаваемого в забоях работающим электрооборудованием. Результат достигается тем, что по меньшей мере части секций крепи приданы датчики сбора информации, соединенные с устройствами управления секциями крепи и сканирующие по меньшей мере рабочий и эксплуатационный участок приданных секций крепи, причем датчики сбора информации выполнены с возможностью включения и выключения устройствами управления приданными секциями, датчики сбора информации включаются устройствами управления приданными секциями крепи перед запланированным перемещением секции крепи и выключаются по окончании перемещения, причем каждой секции придан собственный датчик сбора информации. 2 н. и 28 з.п. ф-лы, 5 ил.
| DE 3627174 A1, 12.03.1987 | |||
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ И ИНДИКАЦИИ СОСТОЯНИЯ МЕСТА ВОЗМОЖНОГО РАЗМЕЩЕНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 1994 |
|
RU2093898C1 |
| УСТРОЙСТВО ДЛЯ ВКЛЮЧЕНИЯ-ВЫКЛЮЧЕНИЯ ЭЛЕКТРОЛАМП В ЖИЛЫХ И ПРОЧИХ ЗДАНИЯХ | 1995 |
|
RU2110864C1 |
| Прибор для определения растягивающих усилий, возникающих в болте при его затягивании | 1926 |
|
SU10700A1 |

