Настоящее изобретение относится к способу определения местоположения людей и/или передвижных машин в шахтовых полостях с использованием RFID-технологии с множеством базовых станций, которые распределены вдоль шахтовой полости, которая подлежит мониторингу, с использованием, по меньшей мере, одного RFID-транспондера, связанного с человеком или машиной, который содержит идентификационные данные и может быть активирован базовой станцией, и данные могут быть считаны бесконтактным способом с использованием приемников, и, предпочтительно, с центральным контроллером для базовых станций и приемников. Изобретение относится также к предпочтительной области применения такого способа, а именно, к инженерной системе выемки руды из длинного забоя. Система включает в себя: секции щитовой крепи, которая установлена вдоль длинного очистного забоя и предназначена для поддержания длинного очистного забоя открытым; конвейерное устройство для доставки извлеченного материала; машину для извлечения руды, которая может перемещаться назад и вперед между концевыми участками длинного очистного забоя; устройство для определения местоположения людей и/или машин в длинном очистном забое с использованием RFID-технологии; при этом устройство для определения местоположения содержит: базовые станции, распределенные вдоль длинного очистного забоя; и имеющие передатчик; приемники, распределенные вдоль длинного очистного забоя; по меньшей мере, один RFID-транспондер, связанный с человеком или машиной, который хранит идентификационные данные, может быть активирован базовыми станциями, и данные могут быть считаны бесконтактным способом с использованием приемников; и, предпочтительно, центральный контроллер для базовых станций и приемников.
Система определения местоположения человека в шахтных полостях известна из DE 102004024073 А1. Система функционирует с использованием микросхем индивидуальной идентификации, которые, в случае опасности, например в случае смещения секции щитовой крепи, подвергаются электромагнитному облучению, таким образом, вызывая передачу электромагнитного ответного сигнала. Микросхема индивидуальной идентификации или транспондер обеспечиваются перезаряжаемым аккумулятором для подачи энергии и могут, в частности, быть соединены с источником питания фонаря головного света горняка. Системы ленточных конвейеров или поперечные каркасы, то есть перегрузочная конструкция между конвейером длинного очистного забоя и штрековым конвейером, составляют предпочтительную область применения данной системы определения местоположения людей.
DE 102008038377 В3 описывает практическое применение RFID-технологии при ведении горных работ для установления расположения и местоположения ответвлений шахтовой полости при добыче угля подземным способом. В данном случае выполняется мониторинг транспондеров, имеющих идентификационные данные, которые установлены на секциях щитовой крепи, и находящиеся вблизи базовые станции в виде трансиверных станций связаны с транспондерами и используются для считывания информации транспондеров. Опорные транспондеры, которые размещены с использованием маркшейдерской съемки, связаны с индивидуальными базовыми станциями, с тем чтобы точно картировать шахтную полость, такие как длинный очистной забой, с использованием данных, записанных базовыми станциями.
Предпринимаются попытки также использовать RFID-технологию для определения местоположения людей при ведении подземных горных работ. US 2007/0264967 А1 описывает, например, такую систему определения местоположения, в которой каждый человек носит RFID-транспондер, который может устанавливать связь с другими RFID-транспондерами. Связь осуществляется на частоте 2,4 GHz или в ZigBee сети.
В соответствии с повышенными требованиями к обеспечению техники безопасности при ведении подземных горных работ, устройства должны быть взрывозащищенными и надежными, в частности, при эксплуатации оборудования инженерной системы длинного очистного забоя при добыче угля. Задачей настоящего изобретения является создание способа установления местоположения людей и оборудования инженерной системы длинного очистного забоя, в частности, для добычи угля, при котором учитываются конкретные признаки эффективного использования RFID-технологии.
Для выполнения данной задачи, согласно предложенному способу, передатчики соседних базовых станций, расположенных вдоль области шахтовой полости, которая подлежит мониторингу, последовательно излучают на своей волне передачи с целью активации RFID-транспондера. Хотя это возможно, в принципе, что передатчики всех базовых станций непрерывно излучают волну передачи на полную мощность, чтобы активировать индивидуальные RFID-транспондеры, находящиеся в мониторинговой области шахтовой полости, и затем определяется местоположение упомянутых транспондеров, используя приемники, потери энергии таких систем будут слишком высокими и, кроме того, все используемое оборудование, а также горняки будут непрерывно находится под относительно высоким электромагнитным излучением. Решение, согласно изобретению, состоит в том, что, по меньшей мере, соседние передатчики излучают волну передачи во временной последовательности с временным интервалом, который требуется для того, чтобы излучение и прием могли быть выборочными в относительно коротком временном интервале и, возможно, даже в миллисекундном диапазоне и, таким образом, даже длинный очистной забой длинной в несколько сотен метров мог быть полностью сканирован в течение короткого промежутка времени. В результате того, что множество передатчиков располагаются вдоль области мониторинга, конус передачи для каждого передатчика для осуществления полного мониторинга относительно мал, в результате чего каждый длинный забой может быть сканирован при использовании сравнительно малой энергии и, таким образом, при незначительной электромагнитной нагрузке на человека и оборудование.
Согласно одному полезному уточнению способа согласно изобретению, все базовые станции, расположенные вдоль мониторинговой области, могут последовательно излучать волну передачи, расположенные локально рядом, используя их передатчик для излучения волны передачи во времени после базовой станции в каждом случае, согласно одному варианту. Согласно другому уточнению, излучение может быть осуществлено таким образом, что только один передатчик, расположенный вдоль всей шахтовой полости излучает волну передачи в определенный момент времени. Альтернативно, множество передатчиков могут излучать волну передачи одновременно или приблизительно одновременно в определенный момент времени, в данном случае, работающие в данный момент времени передатчики должны быть в различных секциях шахтовой полости, которые подлежат мониторингу. Способ может, следовательно, быть реализован таким образом, что вся шахтовая полость разделяется на секции и каждая секция последовательно сканируется независимо друг от друга, то есть посредством последовательного излучения волн передачи базовыми станциями, расположенными в соответствующей секции.
Внутри всей шахтовой полости или внутри секции передатчики могут генерировать волны передачи неупорядоченными временными последовательностями или заранее заданными временными последовательностями. Заданной временной последовательностью может быть, например, последовательность, в которой следующий локальный соседний передатчик излучает волну передачи в одном направлении и, в каждом случае, после окончания сканирования предыдущей базовой станцией, по меньшей мере, излучением волны передачи для активации RFID-транспондера полностью или максимально возможной степенью. Центральное устройство обработки данных или центральный контроллер могут также быть использованы для сравнения данных, полученных при использовании временной последовательности, с имеющейся информацией, полученной при осуществлении предыдущего сканирования. Если центральное устройство обработки данных имеет информацию, например, о том, что машина должна быть размещена или человек должен находиться в конкретной секции шахтовой полости, и оказывается, что ни людей, ни машин нет, процесс сканирования может также быть осуществлен конкретно в данной секции. Альтернативно, если из конкретной секции шахтовой полости будет осуществлена эвакуация людей из забоя, временные последовательности могут управляться таким способом, что передатчики последовательно излучать волну передачи только в секции шахтовой полости вывода людей, чтобы быть уверенным в том, что все люди выведены из данной секции шахтовой полости, так как ни один RFID-транспондер не детектируется в секции шахтовой полости, где осуществлялся мониторинг. Возможно использование селективной временной последовательности, в частности, для компенсации ошибочного срабатывания транспондеров, вызванного работой других машин или устройств.
Отдельно взятые секции могут также быть сканированы, секция за секцией, если направление движения передвижной машины или транспортного средства, например, известно и маршрут движения машины или транспортного средства предполагается быть исследован заранее. В режиме последовательной работы передатчиков на излучение волн передачи, используя индивидуальные передатчики, которые вырабатывают сигнальную волну, которая последовательно распространяется вдоль шахтовой полости или длинного очистного забоя, даже если соответственно сгенерирована другим передатчиком, и проходит через секцию или всю шахтовую полость, например, в одном направлении, в зависимости от конфигурации временной последовательности, чтобы детектировать все RFID-транспондеры, находящиеся в шахтовой полости в этом проходе, затем используется центральный контроллер для определения тех секций или зон, в которых присутствуют RFID-транспондеры.
В одном особенно выгодном уточнении метода согласно изобретению, сила сигнала волны передачи каждого передатчика может быть изменена, чтобы установить расстояние между детектированными RFID-транспондерами, в частности транспондером, связанным с человеком, и ближайшей базовой станцией или ближайшим приемником. В предпочтительном уточнении, каждая базовая станция имеет как передатчик, так и приемник. Однако небольшое количество приемников могло быть также использовано и/или приемники изготовлены с возможностью быть размещенными отдельно от передатчиков.
Особенно предпочтительная поправка способа относится к практике определения местоположения людей при эксплуатации оборудования инженерной системы выемки руды в длинном забое, соответствующей инженерной системы выемки руды при обеспечении наличия секций щитовой крепи, расположенными вдоль длинного забоя и предназначенными для поддержания длинного забоя открытым, оснащенным конвейерным устройством для транспортировки извлеченного материала, и машиной для извлечения руды, которая может быть перемещена между конечными участками длинного забоя, как правило, вдоль конвейерного устройства. В случае использования такого приспособления определения местоположения для применения в длинном забое при эксплуатации оборудования инженерной системы выемки руды, базовые станции, предпочтительно, ассоциируются с каждой секцией щитовой крепи, но возможно использование также только с каждой n-й секцией щитовой крепи, где n является любым натуральным числом между 2 и 5 и, следовательно, 2<n<5. В данном случае, это не является абсолютно необходимым условием для учета расстояния местоположения между базовыми станциями, имеющими соответствующие передатчики, которые могут работать на излучение с временной задержкой и могут оставаться на том же расстоянии в каждом конкретном случае, пока расстояние между двумя базовыми станциями позволяет осуществить полное покрытие шахтовой полости, и, соответственно, расстояние должно иметь такую величину, чтобы гарантированно осуществить мониторинг конусом передачи волн передачи передатчиков смежных базовых станций.
Изобретение также относится к инженерной системе выемки руды из длинного забоя для осуществления способа, в котором, согласно изобретению, базовая станция связана с каждой n-й секцией щитовой крепи, где n = от 2 до 5, и базовые станции могут управляться центральным устройством обработки данных или центральным контроллером, так, что передатчики, по меньшей мере, смежно расположенных базовых станций последовательно излучают волну передачи с целью активации RFID-транспондера. Как ранее подробно было объяснено, волны передачи могут быть сгенерированы различным образом, как это указано в вариантах способа, предпочтительно заявленным является способ, в котором передача волн передачи осуществляется с временной задержкой неупорядоченной или заранее заданной временной последовательностью через всю шахтовую полость или секции.
Это особенно полезно, если сила сигнала волны передачи каждого передатчика может быть изменена или изменена с целью установления расстояния между обнаруженным RFID-транспондером, в особенности, транспондером, связанным с человеком, и ближайшей базовой станцией. Величина сгенерированного конуса передачи меняется посредством изменения силы сигнала волны передачи. Если RFID-транспондер был детектирован в конкретной секции в предыдущий проход сканирования, то возможно установить, когда конкретный RFID-транспондер ответил за запрос, то есть был активирован, и когда не отвечал на сигнал, когда сила сигнала постоянно увеличивалась или уменьшалась в диапазоне сканирования. Ориентировочное расстояние может затем быть получено из величины силы сигнала, который излучается в настоящий момент, поскольку сила сигнала имеет ориентировочное значение с заранее установленным соотношением к диапазону сканирования и, таким образом, к диапазону активации RFID-транспондера.
В данном случае (инженерная система выемки руды из длинного забоя для осуществления метода использования), первый RFID-транспондер может быть размещен на машине и, по меньшей мере, один второй RFID-транспондер предназначается для установления местонахождения людей согласно одному варианту способа. Само собой разумеется, что RFID-транспондер ассоциируется с каждым человеком, находящимся в подземном длинном забое, и поэтому только в этом случае возможно достоверно установить местоположение людей, обслуживающих инженерную систему выемки руды из длинного забоя. RFID-транспондер, связанный с машиной, может быть использован, с одной стороны, для периодического определения местоположения соответствующей машины; в особенности, если RFID-транспондер, который сопутствующим образом перемещается с данной машиной, предоставляет возможность регулярно проверять способ функционирования индивидуальных базовых станций после того, как данная машина была детектирована один или несколько раз во время каждого прохода, в зависимости от скорости временной последовательности, в которой волны передачи передаются. С целью сокращения количества приспособлений для определения местоположения, каждая секция щитовой крепи, которая также имеет связанную станцию, может иметь связанный RFID-опорный транспондер, который соответственно установлен в секции конвейерного устройства впереди соответствующей секции щитовой крепи, которая обеспечивается базовой станцией. После того как в подземном длинном забое люди находятся в наилучшем месте, в области между конвейерным устройством и секциями щитовой крепи во время работы так или иначе опорные транспондеры, установленные на конвейерном устройстве, таким образом, всегда предоставляют возможность проверить способ работы связанной станции во время каждого сканирования и, следовательно, каждый раз осуществляется передача волны передачи, если сила сигнала соответствующей волны передачи не выбрана, чтобы быть низкой, чтобы диапазон сканирования был короче и чтобы диапазон сканирования был меньше расстояния между базовой станцией, установленной на секции щитовой крепи и конвейерным устройством. Расстояние варьируется в зависимости от длины удлинителя задней подвески для перемещения горнопроходческого оборудования.
Согласно другому аспекту, центральное устройство обработки данных может быть использовано для выбора секции вдоль длинного забоя, внутри которого передатчики базовых станций последовательно передают волну передачи и/или внутри которого передатчики передают волны передачи с предпочтительно непрерывным изменением силы сигнала, чтобы проверить область эвакуации, например, установить расстояние между персональными транспондерами и базовой станцией или для выполнения иных задач.
В инженерной системе выемки руды из длинного забоя особенно выгодно, если каждый вход на конце длинного забоя имеет связанное устройство обнаружения, которое используется для обнаружения каждого человека, спустившегося в длинный забой, включая носимый упомянутым человеком RFID-транспондер, и чтобы информация об упомянутом человеке была направлена в центральное устройство обработки данных. Обычно допуск людей в длинный забой осуществляется только через главные ворота. Факт размещения устройства обнаружения на входе забоя на главных воротах может быть достаточным для обнаружения, так как в любое время можно использовать центральное устройство обработки данных, транспондеры, и соответственно, контролировать местоположение людей, которые в данный момент времени находятся в длинном очистном забое. Если информация об отсутствии людей в длинном забое передается в центральное устройство обработки данных, то количество последовательностей сканирования может быть значительно сокращено и может быть осуществлен только процесс мониторинга через установленные временные интервалы, информация, поступающая в центральное устройство обработки данных, подтверждающая отсутствие людей, может таким образом быть подтверждена. Если, в отличие от этого, один человек или более находятся в длинном очистном забое, количество и периодичность временных последовательностей, в которых передатчики излучают волны передачи, может быть увеличено с целью осуществления надежного обнаружения текущего местонахождения индивидуальных транспондеров и, таким образом, находящихся людей в любое время. В данном случае устройство обнаружения предпочтительно также содержит сенсор, который не привязан к RFID, например камеру с распознанием изображения, чтобы быть уверенным в том, что ни один человек без RFID-транспондера не допускается в длинный забой или был допущен в длинный очистной забой. Устройство обнаружения может использовать сигнал определения, такой как оптический или акустический сигнал, для установления факта доступа человека в длинный очистной забой, или для обнаружения человека, или подтверждения работы индивидуального RFID-транспондера. В данном уточнении особенно выгодно, если безопасная зона для, по меньшей мере, пребывания одного человека определена на каждой секции щитовой крепи и машина для извлечения руды может управляться таким образом, чтобы иметь возможность даже автоматически выключаться, в случае если не все RFID-транспондеры направили ответный сигнал в центральное устройство обработки данных о людях, обнаруженных внутри безопасной зоны. Процедура автоматического отключения может также быть ограничена секциями длинного забоя, в которой известно, что или работает машина извлечения руды, или происходит смещение единичной секции щитовой крепи. После того как информация о смещении единичной секции щитовой крепи и о перемещении машины извлечения руды направлена в устройство управления перемещением секции щитовой крепи и, возможно, в центральное устройство обработки данных, в особенности в полностью автоматизированном длинном очистном забое, где длинный очистной забой может быть разделен в данном отношении на секции с различным уровнем риска и, в частности, в отношении последовательностей функционирования машин, например, при перемещении конвейерного устройства или перемещении секции щитовой крепи, оборудование может быть автоматически выключено или отключено соответствующим образом центральным устройством обработки данных или соответствующими электронными устройствами базовых станций или т.п.
В способе и при использовании инженерной системы выемки руды из длинного очистного забоя существует конкретное преимущество, в случае если RFID-транспондеры представляют собой активную или полуактивную метку. В силу того что RFID-транспондер расположен в диапазоне излучения волны передачи передатчиком, волна передачи возбуждает передачу идентификационного сигнала и направляет в приемник базовой станции. В случае использования активных меток, которые также включают в себя полуактивные метки, отдельные сведения, относящиеся к передатчику, который активировал транспондер, также включают в себя хранимые идентификационные данные, с результатом того, что оба, и источник излучения, и отдельные сведения, относящиеся к транспондеру, имеются в наличии и передатчик и центральное устройство обработки данных могут получать необходимую информацию от них. Использование, по меньшей мере, полуактивной метки, следовательно, предоставляет возможность каждому транспондеру активироваться волной передачи передатчика и в ответном сигнале иметь информацию не только о хранимых идентификационных данных, но также в то же самое время информацию, относящуюся к передатчику, из которого был принят сигнал активации связанным приемником.
Альтернативно или дополнительно, существует особенное преимущество, если передатчики излучают сигнальную волну, которая предпочтительно модулирована в низкочастотном диапазоне, и RFID-транспондеры активированы сигнальной волной, излучающей идентификационную волну в радиочастотном диапазоне, и приемники выполнены с возможностью считывать идентификационную волну в радиочастотном диапазоне. Для активации передатчики могут излучать, в частности, сигнальные волны в частотном диапазоне между 90 и 135 KHz и/или транспондеры передают сигнал в радиочастотном диапазоне, например, 868 MHz, 433 MHz, 2,4 GHz 5,5 GHz. Диапазон индивидуальных сигнальных волн передатчиков в основном зависит от выбранной частоты и конфигурации антенн, которые связаны с соответствующими транспондерами в дополнение к схеме памяти, где хранятся информационный данные или информация о базовых станциях.
Как известно специалистам в данной области техники, центральное устройство обработки данных или центральный контроллер могут быть расположены отдельно. Однако данные устройства могут образовывать также электронный блок базовой станции или всей базовых станций, в зависимости от вида связи, который используется базовыми станциями для коммуникации между собой.
Дополнительные преимущества и уточнения способа следуют из следующего описания предпочтительного примера варианта осуществления инженерной системы выемки руды из длинного очистного забоя, в котором осуществлено предпочтительное уточнение способа. В следующих чертежах:
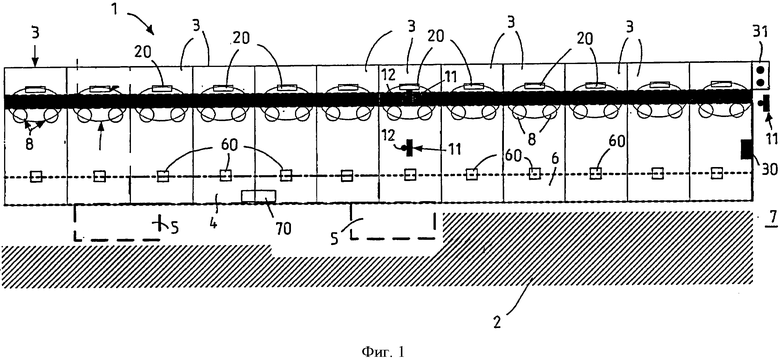
Фиг.1 схематически показывает очень упрощенный вид профиля подземного длинного очистного забоя с приспособлением для определения местоположения людей;
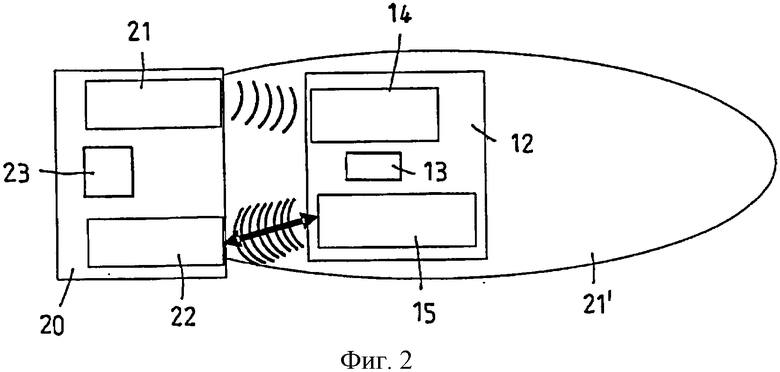
Фиг.2 схематично показывает структуру осуществления бесконтактной связи между базовой станцией и транспондером;
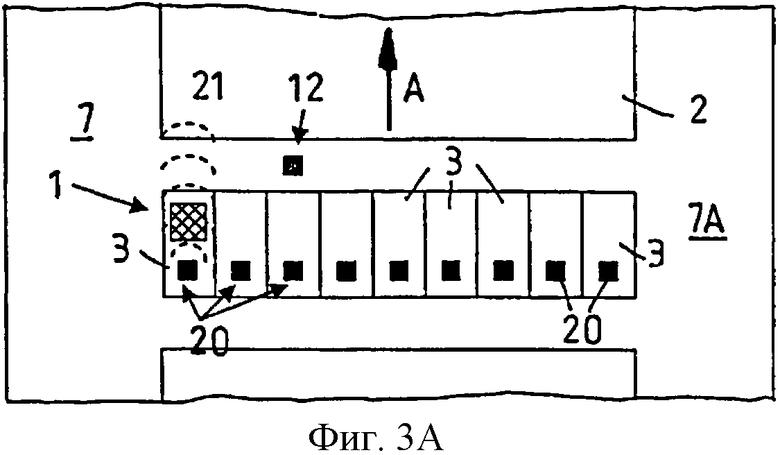
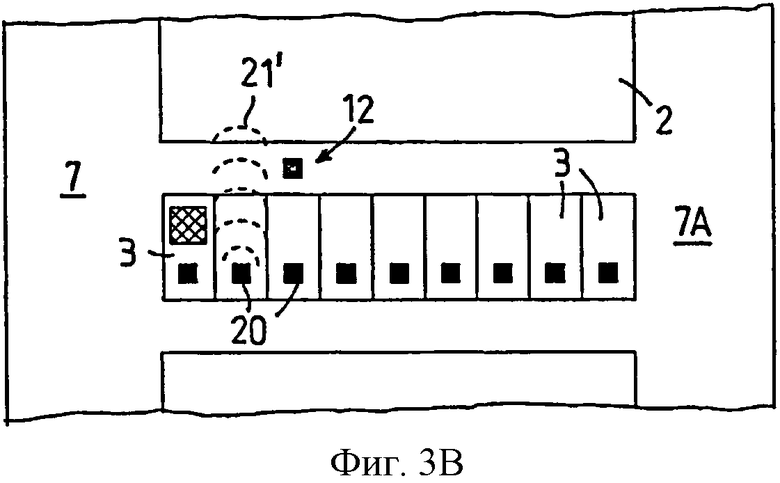
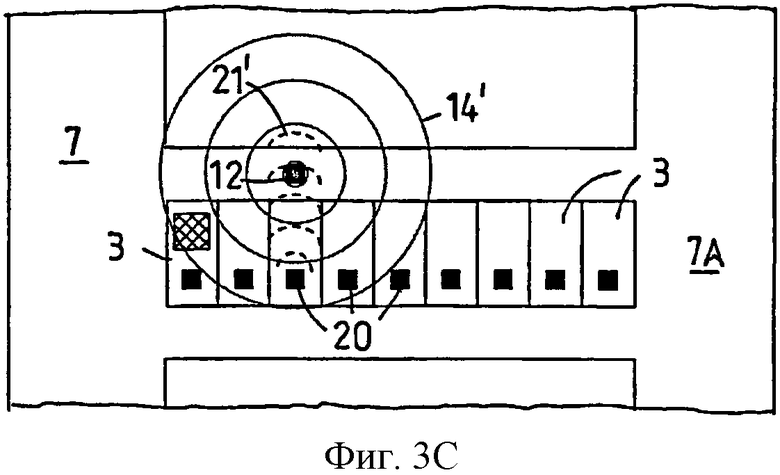
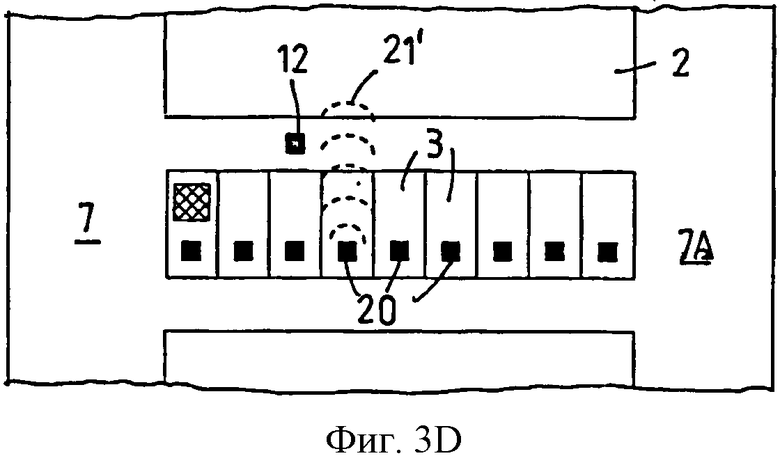
Фигуры 3A-3D показывают предпочтительную последовательность согласно способу определения местоположения людей в длинном очистном забое с использованием приспособления согласно изобретению; и
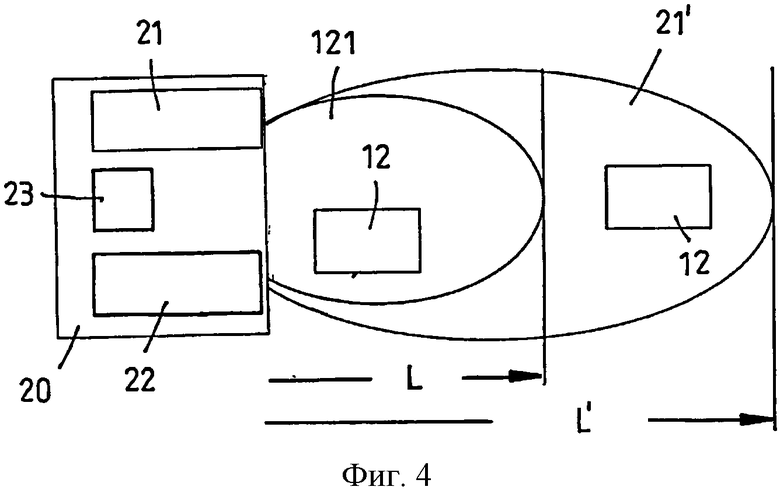
Фиг.4 схематически показывает схему использования возможности изменения силы сигнала для установления расстояния между транспондером и базовой станцией.
На фиг.1 ссылочная позиция 1 используется для обозначения инженерной системы выемки руды из длинного очистного забоя целиком, которая установлена в подземной шахтовой полости, возможно, любой желаемой длины. Поскольку выемка полезного ископаемого, такого как уголь, в частности, осуществляется в шахтовой полости с фронта очистного забоя, обозначенного ссылочной позицией 2, то данная шахтовая полость обычно называется длинным очистный забоем. Инженерная система 1 выемки руды из длинного очистного забоя содержит множество секций 3 щитовой крепи, которые располагаются рядом друг с другом и используются для поддержания длинного очистного забоя открытым, чтобы осуществлять выемку полезного ископаемого с фронта 2 длинного очистного забоя, с использованием машины 4 извлечения руды, которая показана в примерном варианте осуществления, и образована врубонавалочной машиной с двумя шнековыми комбайнами 5. Выемка руды с фронта 2 длинного очистного забоя осуществляется с использованием врубонавалочной машины 4 и далее транспортируется через схематически показанный конвейер 6, который образует конвейерное устройство для доставки руды из длинного очистного забоя и далее к штрековому конвейеру (не показан) в горизонтальную подъемную горную выработку, обозначенную с использованием ссылочной позиции 7. Только две стойки 8 используются для поддержки козырька крепи, так называемого висячего бока, чтобы обеспечить устойчивое положение конвейера 6 под козырьком крепи и одновременно обеспечивать извлечение руды с фронта 2 длинного очистного забоя с использованием шнековых комбайнов 5, соответственно показанных на секции 3 щитовой крепи. Конвейер 6 одновременно образует направляющее устройство для врубонавалочной машины 4, которое может перемещаться между двумя концевыми участками длинного очистного забоя.
На фиг.1 также показаны три человека 11, один человек находится в безопасной зоне, расположенной внутри секции 3 щитовой крепи, обычно данная зона находится вблизи стоек 8, как это известно специалистам в области горного дела, в особенности при добыче полезных ископаемых подземным способом. Безопасная зона может также составлять часть так называемого тыльного прохода, вдоль которого горняк 11 может безопасно перемещаться по длинному очистному забою. Второй горняк находится вне безопасной зоны между конвейером 6 и стойками 8 в той же секции 3 крепи. Третий горняк 11 находится в горизонтальной выработке 7. Каждый горняк 11 имеет RFID-транспондер 12, который показан на фиг.1 в виде круга. Эти RFID-транспондеры 12, каждый, являются активными метками (или полуактивными метками), каждый из них запитывается от перезаряжаемого аккумулятора и носится горняком 11, например, на поясе или на каске. Как схематически показано на фиг.2, каждый транспондер 2 имеет чип 13 памяти с идентификационными данными, относящимися к RFID-транспондеру 12 и в этом отношении также относящимися к горняку 11, который носит с собой соответствующий транспондер 12. В примерном варианте осуществления инженерной системы 1 выемки руды, показанной на фиг.1, каждая секция 3 щитовой крепи также имеет связанную с ней базовую станцию 20, которая исходя из фронта 2 очистного забоя в данном случае установлена на завальной стороне двух стоек 8 и также на завальной стороне безопасной зоны для горняка 11 и размещена там, например, вместе с устройством управления для соответствующей секции 3 щитовой крепи.
Фиг.2 показывает схему взаимодействия базовой станции 20 и RFID-транспондера 12. Для изобретательского применения RFID-технологии в инженерной системе выемки руды согласно изобретению, базовая станция 20 содержит передатчик 21, представляющий собой низкочастотный передатчик, который используется для генерирования сигнала передачи в пределах конуса передачи, обозначенного ссылочной позицией 21, если передатчик 21 базовой станции 20 активирован. Передатчик 21 образует так называемый возбудитель, используемый в RFID-технологии. В показанном примере варианта осуществления, базовая станция 20, кроме того, содержит приемник 22, который состоит из радиочастотного приемника, в данном случае. Однако приемник может также быть размещен отдельно от базовой станции. Приемник 22 в такой базовой станции 20 иногда также называется точкой доступа в RFID-технологии. Чтобы активировать передатчик 21 и приемник 22, необходимо их запитать энергией, базовая станция 20 также имеет блок 23 питания, который может также иметь подходящую электронную схему для управления или активации передатчика 21 и для приема сигнала приемником 22 и в то же время, может осуществлять обмен данными с другими базовыми станциями и/или с ведущим центральным контроллером или с центральным устройством обработки данных, которое может быть также размещено под землей или в горной выработке, например, через соответствующий интерфейс, например интерфейс для подключения к сети Ethernet. RFID-транспондер 12 как активная метка или полуактивная метка, имеет чип 13 памяти, который хранит, по меньшей мере, идентификационные данные транспондера 12 и содержит, возможно в форме интегрированных с чипом 13 памяти, низкочастотную секцию 14 приемника для приема волн низкой частоты, излучаемых передатчиком 21, и радиочастотный трансивер 15 для излучения ответного радиочастотного сигнала. Транспондер 12 также содержит антенну (не показано) для приема волн низкой частоты и/или передачи ответных радиочастотных волн. RFID-транспондер 12 активируется низкочастотным приемником 14, принимая передаваемую волну от передатчика 21 базовой станции 20. Приняв волну передачи от передатчика 21, секция 15 трансивера активируется и передает ответный радиочастотный сигнал с идентификационными данными, хранимыми в чипе 13 памяти, совместно с идентификационным сигналом в приемник 22 базовой станции 20. Идентификационный сигнал предоставляет возможность четко идентифицировать каждый передатчик 21 или передающую станцию 20, которая активировала транспондер 12. Приемник 22 базовой станции 20, соответственно, принимает ответный радиочастотный сигнал, который несет не только информацию, относящуюся к идентификационным данным от чипа 13 памяти, но также и информацию, относящуюся к базовой станции из множества базовых станций 20, которая активировала RFID-транспондер 12. Радиочастотный ответный сигнал трансивера 15 может быть передан, например, в диапазоне 2,4 ГГц, принимая во внимание тот факт, что передатчики 21 предпочтительно передают низкочастотный сигнал в частотном диапазоне между 90 кГц и 135 кГц.
Чтобы иметь возможность использовать базовые станции 20, и определить транспондер 12, и посредством последнего установить местонахождение человека или машины, которые снабжены соответствующим транспондером 12, в длинном очистном забое, весь длинный очистной забой последовательно сканируется в случайном порядке или предпочтительно в заданном порядке, процесс сканирования может быть осуществлен путем выполнения различных сканирующих последовательностей или циклов в зависимости от начальной ситуации. Далее поясняются сканирующие последовательности со ссылкой на фигуры 3A-3D.
На фигурах 3А-3D схематически показана в очень упрощенном виде последовательность способа с особенно предпочтительным порядком сканирования. На фигурах 3A-3D фронт длинного очистного забоя обозначен позицией 2, а позиция 3 обозначает секции щитовой крепи, расположенные рядом друг с другом, позиция 20 используется для обозначения каждой имеющейся базовой станции, позиция 7 используется для обозначения главных ворот и позиция 7А обозначает вспомогательную горную выработку. Направление работы механизмов инженерной системы 1 выемки руды указано стрелкой А на фигуре 3А; машина для извлечения руды и конвейер не показаны. Каждая секция щитовой крепи снабжена базовой станцией. Как показано на фиг.3А, транспондер 12 размещен перед третьей секцией 3 щитовой крепи, если смотреть со стороны главных ворот 7. Во время первоначального сканирования базовая станция 20, установленная на первой секции 3 щитовой крепи, передает низкочастотный сигнал, как показано с использованием волн 21" передачи. Передатчик 21 излучает конус 21 передачи или волны 21" передачи поперек по отношению к продольному измерению длинного очистного забоя и перпендикулярно направлению перемещения машины для извлечения руды. Конус передачи этих волн 21" передачи сканирует, по существу, только область впереди соответствующей секции 3 щитовой крепи. Процедура сканирования у секции 3 щитовой крепи требует временного интервала в миллисекундном диапазоне. Транспондер 12 находится вне конуса передачи и поэтому не активируется волнами 21" передачи. На следующем этапе, как показано на фиг.3В, передатчик следующей базовой станции 20, установленный на секции 3 щитовой крепи, непосредственно принимающей, теперь активируется и, как следствие, излучает волны 21' передачи. Активация каждой базовой станции 20 в конкретный момент времени может управляться и регулироваться, в частности, центральным контроллером. Все другие базовые станции 20 находятся в неактивном состоянии и в настоящий момент времени не передают сигнал передачи. Транспондер 12 снова не детектирован.
Транспондер 12 активируется лишь волнами 21' передачи, испускаемыми соответствующей базовой станцией 20, во время сканирования, как показано на фиг.3С, и транспондер 12 передает ответный сигнал в любом требующемся направлении, как показано с использованием круговых ответных волн 14'. Ответный сигнал 14' детектируется, по меньшей мере, приемной секцией базовой станции 20, которая также испускает волны 21" передачи, но, возможно, также и базовой станцией 20 примыкающей секции 3 щитовой крепи. Так как сигнальная волна 14' содержит не только идентификационные данные для транспондера 12, но также информацию, относящуюся к базовым станциям 20, которые активировали транспондер 12, каждая базовая станция 20, которая готова принять сигнал, может, в принципе, передать информацию центральному устройству обработки данных или всем другим базовым станциям 20 о местонахождении транспондера 12 и, таким образом, о местонахождении человека, который носит с собой транспондер 12. Чтобы иметь возможность с большой достоверностью различить базовые станции 20 и секции 3 щитовой крепи, с которыми эти базовые станции 20 связаны, в случае когда ответный сигнал от метки 12 принят множеством приемников базовых станций 20, низкочастотный сигнал, который соответствующим образом испускается передатчиками 21, может быть модулирован несколько отличающимся образом для каждой секции 3 щитовой крепи.
Фиг.3D показывает ситуацию, которая возникла позднее, через короткий промежуток времени после того, как передатчик базовой станции 20 четвертой секции 3 щитовой крепи излучает волны 21" передачи. В связи с тем что транспондер 12 не находится в конусе передачи этой базовой станции 20, он больше не активируется. Аналогичные действия будут происходить при дальнейшем сканировании в последовательности, показанной на фигурах 3A-3D. На фигурах 3A-3D устройство для определения местоположения может, следовательно, установить и подтвердить детектирование транспондера 12, находящегося впереди третьей секции 3 щитовой крепи в данном случае. В обычной последовательности все другие базовые станции 20 других секций 3 щитовой крепи также активируются на короткое время для проверки возможной активации излучением волны передачи дополнительных транспондеров. Последовательность может быть реализована таким образом, что базовая станция секции 3 щитовой крепи, которая расположена ближе всего в одном направлении, соответствующим образом активируется следующей, чтобы излучать волны 21" передачи. Таким образом, длинный очистной забой последовательно сканируется конусом передачи, который последовательно генерируется каждой имеющейся базовой станцией 20, и сканируется весь длинный очистной забой в течение короткого промежутка времени. С последовательностью сканирования, в которой ближайшая базовая станция соответственно излучает конус передачи, можно быть уверенным в том, что никто не сможет случайно остаться не обнаруженным между двумя конусами передачи, даже если человек перемещается. Конус передачи, испускаемой каждой базовой станцией 20, в любом случае, с учетом силы сигнала, первоначально должен иметь длину, достаточную для детектирования всей области между базовой станцией 20 и стенкой канала с завальной стороны конвейерного устройства, поскольку только в этой области может находиться человек с транспондером 12.
Теперь снова делается ссылка на фиг.1. На фиг.1 показано, что опорный транспондер 60 может дополнительно быть размещен с завальной стороны на стенке канального конвейерного средства, таким же образом соответственно связанный с каждой базовой станцией, для того чтобы отрегулировать и/или проверить работоспособность соответствующей базовой станции 20 во время каждого прохода сканирования, т.е. в каждый момент времени излучения конуса передачи, в связи с тем что базовая станция и центральное устройство обработки данных могут распознавать ответный сигнал транспондера 60, тем самым подтверждая нахождение транспондера 60 на конвейере. Альтернативно или дополнительно, как также обозначено на фиг.1, дополнительный транспондер 70 мог бы также, более того одновременно, перемещаться с машиной 4, таким образом, предоставляя дополнительные возможности для осуществления контроля в вариантах способа.
В особенно выгодном уточнении осуществления инженерной системы 1 выемки руды из длинного очистного забоя, согласно изобретению, как обозначено на главных воротах 7 на фиг. 1, каждый пункт допуска в длинный очистной забой может иметь связанное устройство 30 обнаружения, которое может состоять из камеры и связанной RFID базовой станцией, например, чтобы детектировать каждого горняка 11, входящего в длинный очистной забой, используя систему распознавания изображения, с одной стороны, и RFID-технологию, с другой стороны. Если присутствие человека устанавливают с использованием камеры, но одновременно установлен факт отсутствия транспондера 12, то такой горняк 11 ставится в известность посредством устройства сигнализации, таким как графически отображаемый светофор 31, либо звуковым сигналом, о том, что ему доступ запрещен; в противном случае, вся инженерная система 1 выемки руды из длинного очистного забоя выключается. Устройство 30 обнаружения может одновременно использоваться для информирования всех базовых станций 20 и/или ведущего центрального устройства обработки данных о том, какие транспондеры 12 и, соответственно, кто из горняков 11 находятся внутри длинного очистного забоя. При наличии информации о нахождении одного или более транспондеров в пределах длинного очистного забоя все оборудование инженерной системы 1 выемки руды из длинного забоя может быть автоматически выключено и/или продолжительность сканирования могла быть соответственно увеличена с базовых станций, чтобы в любое время получить достоверное подтверждение местоположения каждого транспондера 12 и, следовательно, каждого горняка 11. Существует преимущество особенно для каждого случая, если базовые станции 20 могут управляться или активироваться таким образом, что сканируются только конкретные секции длинного очистного забоя, в связи с тем, что известно, например, что транспондер 12 находится в данной секции. В зависимости от положения врубонавалочной машины 4 и предполагаемого местоположения секции 3 щитовой крепи автоматическое отключение всего оборудования инженерной системы 1 выемки руды из длинного забоя может быть инициировано в случае, когда транспондер 12 находится вне безопасной зоны, т.е. непосредственно впереди базовой станции 20 и позади рудничных стоек 8 секции 3 щитовой крепи.
Фиг.4 использует другую схему для иллюстрации повышения точности установления местоположения транспондера 12, используя базовые станции 20. На фиг.4 показан, с одной стороны, конус 21' передачи волны передачи, как и в предыдущем примерном варианте осуществления, в котором передатчик 21 передает волну передачи на полную мощность сигнала. На фиг.4 ссылочная позиция 121 обозначает второй конус передачи, который сгенерирован тем же передатчиком 21 в низкочастотном диапазоне, но в котором сила сигнала была уменьшена на 50%, например. Ввиду того что показанные два транспондера 12 все еще детектированы и активированы конусом 21' передачи и, соответственно, их ответный сигнал принят приемником 22, только находящийся впереди транспондер 12 активируется волнами передачи в пределах конуса 121 передачи, в данном случае в зависимости от силы излученного сигнала можно сделать вывод о том, что один из двух транспондеров 12 находится на расстоянии L от базовой станции 20, а другой транспондер 12 находится на расстоянии L' - L от базовой станции 20. Текущее местоположение соответствующего RFID-транспондера 12 может, таким образом, быть установлено относительно точно и сравнительно простым образом, динамически уменьшая и/или увеличивая конусы 21' и 121 передачи.
Возможны многочисленные изменения изобретения, не выходящие за пределы нижеследующей формулы изобретения и специалистам в данной области техники очевидны эти изменения из приведенного выше описания. Базовые станции могут также иметь различную структуру. Приемники могут также быть размещены отдельно от базовых станций. Ввиду того что диапазон радиочастотного сигнала выше, чем низкочастотного сигнала, то приемники могли размещаться только спорадически и количество приемников могло бы быть меньше количества передатчиков. Транспондеры и/или базовые станции могли, каждая, иметь множество антенн. Передатчики базовых станций могли быть вмонтированы, например, в коаксиальный кабель, который имел бы щелевую антенну на выбранном месте, чтобы осуществлять излучение сигнала из кабеля. В данном случае положение активного источника сигнала может быть установлено с учетом величины скорости распространения сигнала внутри кабеля и расположением щелевых антенн. Такой вариант изготовления источника сигнала преимущественно пригоден, когда способ согласно изобретению используется для мониторинга ворот или т.п.
В соответствии с конструкцией системы, множество передатчиков могут также излучать волны передачи одновременно, для этой цели пространство шахты для мониторинга разделяется на секции и передатчик имеет возможность излучать волну передачи в то же самое время в каждой секции. В конкретной ситуации, например, когда мониторинг осуществляется только в секции длинного очистного забоя, в котором существует особо опасная обстановка для пребывания людей, способ может также быть осуществлен таким образом, что только данная секция находится в процессе мониторинга, соответственно активируя индивидуальные передатчики один за другим.
Изобретение относится к способу и инженерной системе выемки руды из длинного очистного забоя, имеющей устройство для определения местоположения людей и/или передвижных машин в шахтовых полостях с использованием RFID-технологии с множеством базовых станций 20, которые распределены вдоль шахтовой полости, подлежащей мониторингу, и имеют передатчик и предпочтительно приемник; с по меньшей мере одним RFID-транспондером, связанным с человеком или машиной, местоположение которого необходимо установить, содержащим идентификационные данные и который может быть активирован с использованием базовой станции и может быть считан бесконтактным способом с использованием базовой станции. Для обеспечения способа определения местоположения людей и оборудования инженерной системы выемки руды из длинного очистного забоя, в частности, при добычи угля, который позволяет эффективно использовать RFID-технологию, передатчики, по меньшей мере, расположенных рядом базовых станций вдоль пространства шахтовой полости, подлежащей мониторингу, последовательно излучают волну передачи для активирования RFID-транспондера. Техническим результатом является повышение надежности и экономичности контроля за всеми горняками, находящимися в очистном забое. 2 н. и 18 з.п. ф-лы, 4 ил.
1. Способ определения местоположения людей и/или передвижных машин в шахтовых полостях с использованием RFID-технологии, при этом используется множество базовых станций (20), которые распределены вдоль шахтовой полости, подлежащей мониторингу, и содержат передатчик (21); множество приемников (22), которые распределены вдоль шахтовой полости, подлежащей мониторингу; и по меньшей мере один RFID-транспондер (12), который связан с человеком или машиной, местоположение которого устанавливается, причем RFID-транспондер хранит идентификационные данные, активируется с использованием базовой станции (20) и считывается бесконтактным способом, используя приемники (22), отличающийся тем, что передатчики (21) соседних базовых станций (20) вдоль пространства шахтовой полости, подлежащей мониторингу, последовательно излучают волну (21") передачи, чтобы активировать RFID-транспондер (12).
2. Способ по п.1, отличающийся тем, что все базовые станции (20) вдоль области, подлежащей мониторингу, последовательно излучают волну передачи, причем в каждом случае локально последующая соседняя станция использует свой передатчик для излучения волны передачи временно после базовой станции.
3. Способ по п.1, отличающийся тем, что только один передатчик излучает волну передачи в фиксированный момент времени.
4. Способ по п.1, отличающийся тем, что множество передатчиков излучают волну передачи в фиксированный момент времени, при этом активированные в данный момент времени передатчики расположены в различных секциях шахтовой полости, подлежащей мониторингу.
5. Способ по п.1, отличающийся тем, что передатчики генерируют волны передачи в случайных или заданных временных последовательностях и/или передатчики последовательно излучают волну передачи только в секции шахтовой полости.
6. Способ по п.1, отличающийся тем, что сила сигнала волны (21', 121) передачи каждого передатчика является изменяемой и изменяется для того, чтобы определить расстояние между обнаруженным RFID-транспондером, в частности человеком, и ближайшей базовой станцией.
7. Способ по п.1, отличающийся тем, что предназначен для определения местоположения людей в длинном очистном забое инженерной системы выемки руды с секциями щитовой крепи, установленными вдоль длинного очистного забоя для поддержания длинного очистного забоя открытым; с конвейерным устройством для транспортировки извлеченного материала и с машиной для извлечения руды, которая перемещается между концами длинного очистного забоя, при этом базовая станция связана с каждой секцией щитовой крепи или с каждой n-й секцией щитовой крепи, где n = от 2 до 5.
8. Способ по п.7, отличающийся тем, что первый RFID-транспондер (70) расположен на машине (4), а по меньшей мере один второй RFID-транспондер (12) предназначен для определения местоположения людей.
9. Способ по п.7, отличающийся тем, что каждая базовая станция (20) имеет связанный с ней опорный RFID-транспондер (60), который соответственно установлен в секции конвейерного устройства впереди соответствующей базовой станции (20).
10. Способ по п.7, отличающийся тем, что центральное устройство обработки данных используется для выбора секции вдоль длинного очистного забоя, внутри которого передатчики базовых станций последовательно передают сигнальную волну и/или внутри которого передатчики передают сигнальные волны, сила сигнала которого предпочтительно постоянно изменяется.
11. Способ по п.7, отличающийся тем, что длинный очистной забой имеет входной участок в конце длинного очистного забоя, данный входной участок имеет связанное с ним устройство (30) обнаружения, которое используется для обнаружения любого человека, имеющего допуск в длинный очистной забой, включая RFID-транспондер (12), который находится на упомянутом человеке, и для передачи информации об упомянутом человеке в центральное устройство обработки данных.
12. Способ по п.11, отличающийся тем, что безопасная зона для нахождения человека ограничена в каждой секции (3) щитовой крепи и машина для извлечения руды управляется таким образом, что машина для извлечения руды выключается, если не все RFID-транспондеры, связанные с людьми, о которых передана информация в центральное устройство обработки, обнаружены в безопасной зоне.
13. Способ по п.1 или 7, отличающийся тем, что RFID-транспондеры (12) представляют собой активную метку или полуактивную метку и/или передатчики излучают сигнальную волну, которая предпочтительно модулирована в низкочастотном диапазоне; при этом RFID-транспондеры, активированные сигнальной волной, излучают идентификационную волну в радиочастотном диапазоне, а приемники выполнены с возможностью считывать идентификационную волну, причем базовые станции (20), предпочтительно, каждая имеет передатчик (21) и приемник (22).
14. Инженерная система выемки руды из длинного очистного забоя, содержащая секции (3) щитовой крепи, которые установлены вдоль длинного очистного забоя и предназначены для поддержания длинного очистного забоя открытым; конвейерное устройство (6) для транспортировки извлеченного материала; машину (4) для извлечения руды, которая перемещается между концами длинного очистного забоя; и устройство для определения местоположения людей и/или машин в длинном очистном забое с использованием RFID-технологии, которое содержит базовые станции (20), распределенные вдоль длинного очистного забоя, передатчик (21); приемники (22), распределенные вдоль длинного очистного забоя; по меньшей мере один RFID-транспондер (12), связанный с человеком или машиной, местоположение которого должно определяться, сохраняющий идентификационные данные, активируемый с использованием базовых станций (20) и считываемый бесконтактным способом; и центральный контроллер для базовых станций, отличающаяся тем, что базовая станция (20) связана с каждой секцией (3) щитовой крепи или базовая станция связана с каждой n-й секцией щитовой крепи, где n = от 2 до 5, и базовые станции (20) управляются центральным контроллером так, чтобы передатчики (21), по меньшей мере, расположенных рядом базовых станций (20) последовательно испускали излучение на волне передачи для активирования RFID-транспондера.
15. Инженерная система выемки руды из длинного очистного забоя по п.14, отличающаяся тем, что первый RFID-транспондер (70) расположен на машине (4), а по меньшей мере один второй RFID-транспондер (12) предназначен для определения местоположения людей.
16. Инженерная система выемки руды из длинного очистного забоя по п.14, отличающаяся тем, что каждая базовая станция (20) имеет связанный с ней опорный RFID-транспондер (60), который соответственно установлен в секции конвейерного устройства впереди соответствующей базовой станции (20).
17. Инженерная система выемки руды из длинного очистного забоя по п.14, отличающаяся тем, что центральное устройство обработки данных используется для выбора секции вдоль длинного очистного забоя, внутри которого передатчики базовых станций последовательно передают сигнальную волну и/или внутри которого передатчики передают сигнальные волны, сила сигнала которого предпочтительно постоянно изменяется.
18. Инженерная система выемки руды из длинного очистного забоя по п.14, отличающаяся тем, что длинный очистной забой имеет входной участок в конце длинного очистного забоя, данный входной участок имеет связанное с ним устройство (30) обнаружения, которое используется для обнаружения любого человека, имеющего допуск в длинный очистной забой, включая RFID-транспондер (12), который находится на упомянутом человеке, и для передачи информации об упомянутом человеке в центральное устройство обработки данных.
19. Инженерная система выемки руды из длинного очистного забоя по п.18, отличающаяся тем, что безопасная зона для нахождения человека ограничена в каждой секции (3) щитовой крепи и машина для извлечения руды управляется таким образом, что машина для извлечения руды выключается, если не все RFID-транспондеры, связанные с людьми, о которых передана информация в центральное устройство обработки, обнаружены в безопасной зоне.
20. Инженерная система выемки руды из длинного очистного забоя по п.14, отличающаяся тем, что RFID-транспондеры (12) представляют собой активную метку или полуактивную метку и/или передатчики излучают сигнальную волну, которая предпочтительно модулирована в низкочастотном диапазоне; при этом RFID-транспондеры, активированные сигнальной волной, излучают идентификационную волну в радиочастотном диапазоне, а приемники выполнены с возможностью считывать идентификационную волну, причем базовые станции (20), предпочтительно, каждая имеет передатчик (21) и приемник (22).
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПРИСУТСТВИЯ ЛЮДЕЙ В ПОДЗЕМНОЙ ГОРНОЙ ВЫРАБОТКЕ | 2000 |
|
RU2234136C2 |
| US 2006087443 A1, 27.04.2006 | |||
| US 5268683 A, 07.12.1993 | |||
| DE 102008038377 B3, 11.02.2010 | |||

