Область техники
Настоящее изобретение относится, в основном, к системам слежения за частотой в системах связи, а более конкретно - к системе слежения за частотой в системе связи, где используется ортогональная модуляция Уолша.
Предшествующий уровень техники
В каждой системе связи, где используются модулированные сигналы связи, должен быть предусмотрен некоторый механизм демодуляции принятых сигналов. Кроме того, чтобы гарантировать точную демодуляцию, демодулятор должен обладать возможностью компенсации отклонений или сдвигов частоты несущей принятых сигналов.
Традиционным способом, используемым для осуществления слежения за таким сдвигом несущей в демодуляторе системы связи, является использование системы фазовой автоматической подстройки частоты (ФАПЧ). Демодулятор этого типа хорошо работает, когда передаваемый сигнал модулирован с использованием обычных способов модуляции, и может быть до некоторой степени оптимизирован для получения либо широкополосного отклика, либо высокой точности. Однако при использовании более сложных схем модуляции некоторые свойства этих схем модуляции могут привести к снижению эффективности традиционных способов или их чувствительности.
Это, в частности, справедливо для систем цифровой связи с расширенным спектром сигналов, где используется М-ичная ортогональная кодовая модуляция Уолша. В таких способах группы передаваемых символов данных преобразуются в функции или коды Уолша, которые передаются. Принятый сигнал демодулируется относительно набора таких кодов Уолша, чтобы установить вероятность передачи кодов, позволяющую определить, какие символы данных передаются. Однако погрешности частоты при слежении за такими сигналами, особенно при наличии шума, значительно уменьшают возможность определения того, какой код Уолша был передан, и поддержка слежения за частотой обычных способов слежения становится проблематичной.
Поэтому необходима система слежения за частотой, предназначенная для использования преимуществ некоторых свойств, связанных с М-ичной ортогональной модуляцией Уолша, для повышения эффективности слежения. Такие устройство и способ слежения могут использоваться при воплощении на практике более эффективных модуляторов сигналов связи.
Сущность изобретения
Настоящее изобретение относится к устройству и способу слежения за частотой несущей, используемых в системе связи, где применяется М-ичная модуляция Уолша. Изобретение может быть реализовано отдельно или как составная часть системы демодуляции. Предпочтительный вариант осуществления изобретения может быть использован в среде или системе, например в системе радиосвязи с расширенным спектром сигналов, где используется М-ичная ортогональная модуляция Уолша. В этом варианте осуществления изобретение относится к контуру слежения за частотой, содержащему вращатель или средство вращения, коррелятор или средство корреляции, дискриминатор или средство дискриминации и фильтр или средство фильтрации.
Средство вращения принимает входной сигнал и оценку смещения частоты и выдает входной сигнал сдвинутой частоты, причем сдвиг частоты пропорционален оценке смещения частоты. Средство корреляции определяет корреляцию между множеством функций Уолша и входным сигналом сдвинутой частоты и формирует вектор корреляции. Выходной сигнал коррелятора можно также использовать в качестве выходного информационного сигнала. Средство дискриминации принимает вектор корреляции и формирует сигнал погрешности частоты ("текущую погрешность"). Средство фильтрации накапливает результирующие сигналы погрешности частоты для получения оценки смещения частоты ("остаточной погрешности"), используемой средством вращения.
Вектор корреляции, сформированный коррелятором или средством корреляции, включает в себя множество результатов корреляции, каждый из которых является результатом корреляции между входным сигналом сдвинутой частоты и одной функцией Уолша. Каждый результат корреляции имеет значение индекса, которое может быть представлено в двоичной записи, при этом значение индекса соответствует конкретной функции Уолша.
В одном из вариантов осуществления средство дискриминации определяет текущую погрешность контура слежения за частотой следующим образом. Сначала определяется индекс Уолша для результата корреляции с наибольшей энергией сигнала, содержащейся в векторе корреляции. Это значение выбирается как отображающее наиболее вероятную(ый) передаваемую(ый) функцию или код Уолша и как содержащее наибольшую величину переданной составляющей сигнала. Один из разрядов двоичного представления индекса Уолша, связанный с этим результатом корреляции, затем инвертируется для формирования индекса Уолша другой функции Уолша. Выбирается результат корреляции из средства корреляции, имеющий этот второй индекс, и формируется перекрестное произведение между этим вторым результатом и первым выбранным результатом. То есть, затем определяется мнимая часть произведения между результатом корреляции с наибольшим уровнем энергии и комплексно сопряженной величиной второго результата корреляции, соответствующего индексу реверсированного разряда для первого результата. Результирующее перекрестное произведение, которое определяется из этого процесса, пропорционально текущей ошибке контура слежения за частотой.
В общем случае самый старший разряд (ССР) двоичного представления индекса Уолша, связанный с выходным сигналом наибольшей энергии с коррелятора, является разрядом, который реверсируется. Выходной сигнал средства корреляции для индекса Уолша, выбранного путем реверсирования первого ССР, должен содержать вторую по величине составляющую сигнала при наличии погрешности слежения за частотой.
В других вариантах осуществления дискриминатор определяет текущую погрешность контура слежения за частотой путем подставления результатов корреляции, соответствующих другим инвертированным разрядам индекса Уолша, в вычисления перекрестного произведения. Выходной сигнал средства корреляции, соответствующий реверсированию второго ССР, должен содержать третью по величине составляющую переданного сигнала, а выходной сигнал средства корреляции для реверсирования третьего ССР должен обеспечивать четвертую по величине составляющую сигнала, и так далее. Следовательно, каждый конкретный разряд индекса выбирается для реверсирования на основании желаемой или заранее заданной величины энергии сигнала и соответствующего ей относительного смещения выходного сигнала для использования при определении текущей погрешности контура слежения за частотой. Выбор разрядов более высокого порядка значимости в общем случае обеспечивает более лучшую характеристику контура в установившемся режиме, тогда как разряды менее высокого порядка обеспечивают более протяженную полосу затягивания частоты.
В других вариантах осуществления дискриминатор определяет текущую погрешность путем усреднения различных сочетаний результатов корреляции, каждое из которых определяется посредством манипулирования разрядами или их реверсирования, как описано выше. Когда требуется еще более высокая точность, можно предпринять усреднение двух или более результатов, полученных в результате обработки различного типа (перекрестных произведений), как описано выше.
Дополнительные признаки и преимущества настоящего изобретения, а также структура и работа различных вариантов настоящего изобретения подробно описаны ниже со ссылками на прилагаемые чертежи.
Краткое описание чертежей
Изобретение поясняется ссылками на чертежи, где одинаковые цифровые позиции обозначают идентичные или функционально аналогичные элементы. Кроме того, цифры слева от двух крайних правых цифр цифровых позиций относятся к номеру чертежа, на котором эта цифровая позиция впервые появляется в прилагаемых чертежах, на которых представлено следующее:
фиг.1 - блок-схема контура слежения за частотой, соответствующего настоящему изобретению,
фиг.2 - схема элемента быстрого преобразования Адамара (БПА) с соответствующими значениями выходных сигналов и соответствующими индексами, используемыми для реализации контура слежения, показанного на фиг.1, и
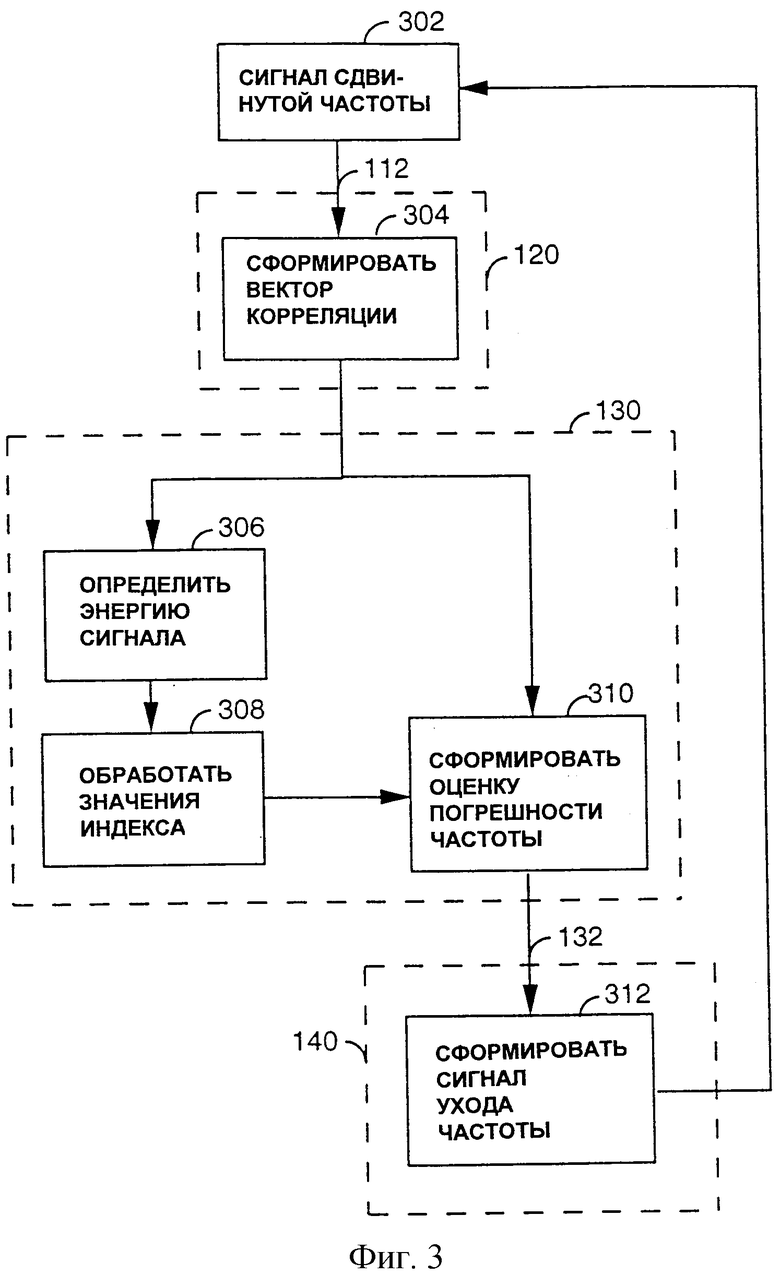
фиг.3 - блок-схема алгоритма обработки, осуществляемой с помощью настоящего изобретения.
Предпочтительные варианты осуществления изобретения
I. Введение
Настоящее изобретение заключается в системе и способе реализации контура слежения за частотой в системе связи, где используется М-ичная ортогональная модуляция Уолша для сигналов связи. Ниже приводится описание предпочтительного варианта осуществления изобретения, а также некоторое количество альтернативных вариантов осуществления. Что касается описания конкретных этапов, конфигураций и компоновок, то следует понять, что оно приводится только для иллюстрации. Специалист в данной области техники поймет, что можно реализовать другие этапы, конфигурации и компоновки без изменения сущности и объема изобретения.
Контур слежения за частотой, соответствующий настоящему изобретению, обеспечивает выполнение функций, во многом совпадающих с функциями обычных контуров слежения за частотой. Кроме того, как и в обычных контурах слежения за частотой, контур слежения за частотой, соответствующий настоящему изобретению, можно реализовать отдельно или в качестве составной части демодулятора системы. В любом случае контур слежения за частотой отслеживает центральную частоту несущей модулированного сигнала связи для обеспечения возможности точной демодуляции. Таким образом, по мере ухода центральной частоты несущей контур слежения за частотой автоматически сдвигает принятый сигнал, чтобы обеспечить точную демодуляцию. Кроме того, если частота гетеродинов используется для отслеживания изменений частоты несущей, которые могут проявляться в виде сдвига несущей, контур слежения за частотой также сдвигает несущую приемника. Поэтому отклик контура слежения за частотой в конечном счете определяет общую эффективность и точность демодулятора.
Как указано выше, контур слежения за частотой, соответствующий настоящему изобретению, работает в системе связи, где используется М-ичная ортогональная модуляция Уолша. В такой системе передаваемые данные преобразуются в цифровые значения, каждое из которых соответствует индексу одной функции Уолша. Функцию Уолша, представленную этим индексом, можно затем передавать (например, в виде серии "элементов сигнала"). После приема при условии, что выравнивание во времени известно, каждую серию элементов сигнала можно коррелировать с заранее заданной совокупностью функций Уолша, чтобы определить, какая функция Уолша была передана. Результаты процесса корреляции используются для определения "наиболее вероятной" функции Уолша, передаваемой в любой заданный момент времени. Сразу после определения этой функции Уолша соответствующее ей цифровое значение отображает данные, которые вероятнее всего были переданы.
Более подробное описание этого приведено ниже. Однако сначала будет представлен краткий обзор кодов Уолша, поскольку настоящее изобретение применяется в первую очередь там, где используется модуляция кодами Уолша.
II. Формирование кодов Уолша
Как указано выше, одним из типов модуляции сигналов является модуляция кодами Уолша, которая используется в предпочтительном варианте осуществления настоящего изобретения. Получение кодов Уолша более полно описано в патенте США №5103459 на "Систему и способ формирования сигналов в сотовой системе телефонной связи с многодистанционным доступом с кодовым разделением каналов", переуступленном правообладателю настоящего изобретения.
В данной области техники известно, что для любой степени 2 можно построить множество из n ортогональных двоичных последовательностей. Фактически, множества ортогональных двоичных последовательностей известны для большинства длин, которые кратны четырем и меньше двухсот.
Одним из классов таких двоичных последовательностей, которые используются для ортогональных кодов и относительно просты в формировании, являются так называемые функции Уолша. Функции Уолша получают из матриц функций Уолша, также известных как матрицы Адамара. Матрицу Адамара порядка n в области действительных чисел можно рекурсивно определить следующим образом:

где  обозначает аддитивную инверсию Н, a H1=1 (т.е.
обозначает аддитивную инверсию Н, a H1=1 (т.е.  ).
).
Следовательно, первые две матрицы Адамара порядков 2 и 4 можно представить в виде

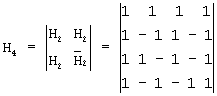
Тогда функция Уолша - это просто одна из строк матрицы Уолша (матрицы Адамара), а матрица функций Уолша порядка L - это квадратная матрица, содержащая L функций или последовательностей длиной по L элементов сигнала (разрядов) каждая.
Функция Уолша порядка n (как и другие ортогональные функции) имеет свойство, заключающееся в том, что на интервале L элементов сигнала (т.е. кодового символа длины L) в последовательности элементов сигнала корреляция между всеми разными функциям в множестве функций длины L равна нулю при условии наличия выравнивания во времени. Это не зависит от модуляции данных (±1) или функции. Это легко понять с учетом того, что ровно половина элементов сигнала или разрядов в каждой функции отличается от половины элементов сигнала во всех остальных функциях.
В случае М-кратной модуляции Уолша размер функции Уолша или длину L кодовой последовательности задают равным (равной) желаемому числу ортогональных кодовых последовательностей, воспринимаемых системой связи. Возможный размер функции Уолша, используемый для реализации усовершенствованных систем связи, составляет шестьдесят четыре (L=64) для линий связи "абонент - межсетевой узел или базовая станция". Это обеспечивает создание до шестидесяти четырех различных обнаруживаемых значений или состояний для данных, передаваемых от заданного абонента. Функции Уолша обычно конфигурируют в виде заранее определенного множества (или таблицы) двоичных последовательностей, содержащего 64 функции Уолша длиной по 64 элемента сигнала, как приведено в упоминаемой ниже спецификации систем IS-95.
Вышеупомянутые свойства функций Уолша делают их идеальными для использования при передаче данных в системах связи с МДКРК. Кроме того, как будет описано ниже, обнаружено, что уникальные свойства кодов Уолша также позволяют использовать их для повышения эффективности контура слежения за частотой.
III. Предпочтительные варианты осуществления настоящего изобретения
Предпочтительный вариант осуществления настоящего изобретения описан со ссылками на фиг.1. Фиг.1 изображает блок-схему контура 101 слежения за частотой, созданную и работающую в соответствии с настоящим изобретением. В системе 101 слежения за частотой используется вращающий элемент или вращатель 110, коррелирующий элемент или коррелятор 120, дискриминатор 130 и фильтр 140 в цепи обратной связи. Коррелятор может быть выполнен в виде устройства быстрого преобразования Адамара (БПА). Однако в рамках изобретения можно использовать и другие известные в технике корреляторы, если они обеспечивают структурированные выходные сигналы и упорядочение индекса функций Уолша.
Как указано выше, система 101 слежения за частотой отслеживает центральную частоту несущей, используемую для передачи данных в любой системе связи, где используется М-ичная модуляция кодами Уолша. Одним из примеров такой системы связи является система передачи с обратной линией связи сотовой системы с МДКРК, подобная описанной в спецификации системы IS-95 под названием "Стандарт совместимости подвижных станций и базовых станций для сотовой двухрежимной широкополосной системы с расширенным спектром сигналов".
В процессе работы дискриминатор 130 определяет текущую погрешность частоты между центральной частотой несущей принятого сигнала и контура коррелятора/демодулятора, который обычно содержит блок БПА. Полученная величина (сигнала 132 ( ) погрешности частоты) подается на фильтр 140 в цепи обратной связи, который накапливает сигналы 132 текущей погрешности частоты, а потом формирует сигнал 142
) погрешности частоты) подается на фильтр 140 в цепи обратной связи, который накапливает сигналы 132 текущей погрешности частоты, а потом формирует сигнал 142  оценки остаточного смещения частоты. Сигнал 142
оценки остаточного смещения частоты. Сигнал 142  оценки остаточного смещения частоты подается на вращатель 110, который последовательно сдвигает принятые входные сигналы 102 на величину, равную сигналу 142 оценки смещения частоты, перед подачей сдвинутого входного сигнала 112
оценки остаточного смещения частоты подается на вращатель 110, который последовательно сдвигает принятые входные сигналы 102 на величину, равную сигналу 142 оценки смещения частоты, перед подачей сдвинутого входного сигнала 112  в коррелятор 120 типа устройства быстрого преобразования Адамара (БПА). БПА-коррелятор 120 воздействует на этот входной сигнал для получения вектора корреляции 122, который используется дискриминатором 130 для замыкания контура слежения. БПА-коррелятор 120 также имеет информационный выход 125, который выдает принятые данные для использования при реальной обработке сигналов.
в коррелятор 120 типа устройства быстрого преобразования Адамара (БПА). БПА-коррелятор 120 воздействует на этот входной сигнал для получения вектора корреляции 122, который используется дискриминатором 130 для замыкания контура слежения. БПА-коррелятор 120 также имеет информационный выход 125, который выдает принятые данные для использования при реальной обработке сигналов.
В соответствии с Фиг.1, принятый сигнал связи 102 (со смещением частоты f) сначала подается на вращатель 110. Вращатель 110 сдвигает частоту входного сигнала 102, чтобы компенсировать изменения средней частоты сигнала несущей. Значение сдвига этой частоты задают на основании значения сигнала 142 оценки ухода частоты, которое определяется дискриминатором 130 и фильтром 140 в цепи обратной связи, как описано ниже. Исходное значение оценки можно эмпирически выбрать случайным образом для конкретной системы или с помощью известных способов и запомнить в запоминающем элементе. Входной сигнал 112  сдвинутой частоты затем подается в БПА-коррелятор 120.
сдвинутой частоты затем подается в БПА-коррелятор 120.
БПА-коррелятор 120 осуществляет корреляцию по входному сигналу 112 сдвинутой частоты и формирует множество значений выходных сигналов, образующих вектор 122. При осуществлении этой корреляции БПА-коррелятор 120 обеспечивает преимущество рассматриваемой модуляции кодами Уолша.
В системе связи, где используется М-ичная модуляция кодами Уолша, сигнальная информация накапливается группами из N символов (где 2N=М), каждая из которых преобразуется в одну из конечного числа (М) функций Уолша. Например, при использование 64-ичной модуляции Уолша (М=64) сигнальная информация накапливается группами по 6 символов каждая (N=6). Кроме того, каждая функция Уолша представлена 64 "элементами" функций Уолша, каждый из которых соответствует ±1. Здесь каждая группа из шести символов используется для выбора соответствующей функции Уолша, которая передается вместо символов данных.
В качестве примера, последующее обсуждение будет продолжено в предположении, что в системе связи используется множество из 64 функций Уолша (М=64). В такой системе каждый переданный код (или функцию) Уолша можно обозначить через Wn, где n=0...63. Таким образом, принятый модулированный сигнал можно считать состоящим из серии функций Уолша Wn в заранее определенной совокупности из 64 функций Уолша, причем каждая функция Wn представлена N символами. Однако важно отметить, что настоящее изобретение одинаково применимо на множестве функций Уолша любого размера или для других отображений символов данных (N≠6) на функции Уолша.
Поэтому для того, чтобы декодировать принятый модулированный сигнал 102, БПА-коррелятор 120 сравнивает принятый сигнал 102, модулированный конкретной функцией Уолша (т.е. Wn), с каждой функцией Уолша в заранее определенном множестве функций Уолша Wn (где k=0...63), чтобы определить, какая функция Уолша была принята (k=n). Ортогональность функций Уолша делает это сравнение непосредственно возможным, поскольку корреляция любых двух различных функций Уолша равна нулю. Таким образом, за счет корреляции принятого сигнала (функции Уолша) со всем заранее определенным множеством функций Уолша Wk демодулятор может предсказать, какая функция Уолша Wn была принята (например, когда корреляция между принятой функцией и n-й заранее заданной функцией не равна нулю; k=n).
Эту корреляцию осуществляет работающий по принципу БПА коррелятор 120 контура 101 слежения за частотой. В соответствии с Фиг.1 подвергнутый вращению входной сигнал 112 подается на БПА-коррелятор 120. БПА-коррелятор 120 воспринимает комплексный принятый сигнал и осуществляет умножение матрицы на него. В возможной системе, где используется множество из 64 функций Уолша, БПА-коррелятор содержит матрицу 64×64 (не показана), которая представляет собой заранее определенную совокупность функций Уолша. БПА-коррелятор 120 воспринимает подвергнутый вращению входной сигнал 112 и коррелирует (перемножает) его с каждым 64-разрядным вектором в матрице. Этот процесс можно определить как декодирование по Уолшу, что известно из уровня техники.
Результатом этой корреляции является вектор размерности 64×1, который представляет собой корреляцию повернутого входного сигнала 112 с каждым вектором в матрице. В идеальном случае в векторе есть нулевые значения, каждое из которых отображает ситуацию, когда вектор 112 входного сигнала ортогонален вектору матрицы. Тогда каждое ненулевое значение в векторе отображает вероятность того, что соответствующий вектор 112 входного сигнала и вектор матрицы неортогональны (например, что соответствующий входной вектор совпадает с конкретным Wk). Однако при наличии шума или помех сигналов, а также в присутствии погрешности при слежении за частотой ненулевые значения в векторе корреляции есть даже тогда, когда векторы входного сигнала и матрицы ортогональны. Кроме того, в идеальном случае ненулевые выходные сигналы могут обладать меньшей энергией, чем некоторые другие выходные сигналы, сформированные при наличии шума. Это затрудняет процесс определения корректной принимаемой функции Уолша Wn по меньшей мере при современных способах обработки.
БПА-коррелятор 120 может осуществлять корреляционную обработку любым из нескольких способов. Кроме перемножения матриц, описанного выше, БПА-коррелятор 120 может быть построен с использованием серии перекрестных схем, которые осуществляют серию суммирований (сложений/вычитаний). Кроме того, БПА-коррелятор 120 может работать по вектору 112 входного сигнала последовательно или параллельно. Структура и работа БПА-процессоров этого типа известны в данной области техники, как показано и описано в заявке на патент США №08/173460 на "Способ быстрого преобразования Адамара и устройство для его осуществления" или в заявке на патент США №08/424773 на "Способ модуляции унифицированных сигналов и устройство для его осуществления", переуступленных правопреемнику настоящего изобретения.
Кроме вектора размерности 64×1, БПА-коррелятор 120 также определяет или присваивает индекс Уолша, связанный со значением каждой осуществленной корреляции. Вообще, значение индекса известно или предполагается на основании упорядочения выходных сигналов заранее определенным образом, например - в порядке возрастания от 0 до 63, как показано на фиг.2. Однако можно было бы формировать и передавать отдельные индексы с соответствующими значениями выходных сигналов, если они последовательно передаются в другие схемы обработки, использующие эти индексы. В любом случае этот индекс является двоичным представлением входа матрицы функций Уолша, который коррелирован со входным сигналом. Например, в возможной системе с использованием 64 функций Уолша значение 6-разрядного индекса связано с каждым выходным сигналом корреляции (например - от 000000 до 111111, представляющие функции от W0 до W63 соответственно). Это изображено на фиг.2, где соответствующие значения корреляции присвоены выходным сигналам коррелятора 120 в порядке линейного увеличения от 0 до 63. Индексы или соответствующие значения индексов показаны на фиг.2 после каждого выходного сигнала. Однако коррелятор 120 или БПА-устройство 120 можно построить таким образом, что будет происходить представление выходных сигналов корреляции в других порядках или моделях, например - по четным и нечетным значениям, поскольку абсолютное значение индекса k известно.
По завершении демодуляции Уолша для любого принятого сигнала БПА-коррелятор 120 выдает вектор корреляции 122. Этот вектор корреляции включает в себя вектор 64×1, отображающий корреляцию для каждой из функций Уолша, и имеет связанные с ним индексы функции Уолша, которые соответствуют каждому результату корреляции. БПА 120 также включает в себя информационный выход 125, который выдает коррелированный принятый сигнал или данные функции Уолша для дальнейшей обработки сигналов с получением символов переданных данных.
Однако, как и при любом процессе демодуляции, на процесс корреляции Уолша оказывает негативное влияние любое изменение или уход частоты несущей принятого сигнала (или гетеродина). Так происходит потому, что любое такое изменение негативно влияет на ортогональность принятых функций Уолша за счет нарушения спектральной синхронизации значений (±1) принятых элементов сигнала с коррелированными последовательностями. При вышеописанном процессе декодирования Уолша присутствие погрешности частоты между средней частотой несущей и частотой декодирования Уолша имеет два эффекта: (1) уменьшается величина энергии, соответствующая функции Уолша, которая реально была передана (k=n); и (2) энергия также начинает появляться в функциях Уолша, которые реально не были переданы (k≠n). Этот последний эффект усугубляется присутствием энергии шума, вносимой в некоторые выходные сигналы. Для преодоления этих трудностей в контуре 101 слежения за частотой используется дискриминатор 130.
Дискриминатор 130 принимает вектор корреляции 122 из БПА-коррелятора 120 и формирует сигнал 132 погрешности частоты, который подается в фильтр 140 в цепи обратной связи. Дискриминатор 130 осуществляет это за счет использования преимуществ определенных уникальных свойств, связанных с функциями Уолша, используемыми в системах связи.
А. Свойства функций Уолша
Как указано выше, функции Уолша, используемые в системах связи, обладают определенными уникальными свойствами. Одно из таких свойств относится к взаимосвязи между энергией, присутствующей в выходном сигнале корреляции для функции Уолша, которая реально была передана ("корректной" функции), и всеми остальными выходными сигналами для коррелированных функций Уолша в заранее определенной совокупности функций. Это свойство подробно описано ниже.
Как указано выше, при использовании функций Уолша в системе связи для модуляции информационного сигнала используют некоторое заранее определенное множество функций Уолша или заранее определенное подмножество некоторого известного множества. В возможной системе, где используются 64 функции Уолша, эту совокупность функций Уолша можно представить как Wk, где k=0...63. Таким образом, в двоичном представлении индекс k функции Уолша можно представить 6-разрядным значением (например, от k=000000 до k=111111).
При модуляции информационного сигнала с помощью конкретной функции Уолша или серии таких функций Wn индекс n функции Уолша, связанный с каждой используемой функцией Уолша, известен. Кроме того, легко также определить двоичное представление этого индекса функции Уолша (например, если n=19, то двоичное представление = 010011). В настоящем изобретении значения индексов формируются или предполагаются соответствующими значениям выходных сигналов коррелятора 120.
Важно, что при использовании модуляции функциями Уолша существует единственное соотношение между индексом функции Уолша, реально используемой для модуляции информационного сигнала, и всеми остальными функциями Уолша в заранее определенной совокупности функций. Это соотношение получается из соотношения между энергией, присутствующей в каждой корреляции функций Уолша, и погрешностью частоты между центральной частотой несущей и контуром слежения за частотой/коррелятором.
Первый случай, который необходимо рассмотреть, возникает, когда нет остаточной погрешности частоты. Когда остаточной погрешности частоты нет и сигнал демодулируется (подвергается корреляционной обработке), энергия сигнала будет присутствовать только в реально переданной функции Уолша (т.е. в сигнале, не содержащем шум). В настоящем изобретении это представляется наличием энергии сигнала только в одном из выходных сигналов корреляции БПА-коррелятора 120 (например, только в сигнале, соответствующем переданному символу Уолша). Все остальные выходные сигналы БПА-коррелятора должны содержать только шум. Хотя в реальной системе связи энергия шума на выходах коррелятора может превысить энергию сигнала.
В отличие от этого, если имеется остаточная погрешность частоты, переданный сигнал будет "протекать" на выходы, связанные с другими декодированными функциями Уолша. В настоящем изобретении это должно проявляться в виде уменьшения энергии в выходном сигнале БПА-коррелятора, представляющем функцию Уолша, которая реально была передана, и увеличения энергии сигнала в выходных сигналах корреляции, соответствующих другим функциям Уолша. Величина этой "утечки" пропорциональна погрешности частоты.
Следовательно, при приеме n-ой функции Уолша с погрешностью частоты fпогрешности и погрешностью фазы ϕо составляющая сигнала для k-го выхода блока БПА для комплексного сигнала, обозначаемая Rk, задается соотношением приводимого ниже уравнения (1). В уравнении (1) Епольэователя представляет мощность входного сигнала 102, Тw - длительность элемента сигнала Уолша, Wk[i] - i-й элемент сигнала k-й функции Уолша, m=k⊕n, где ⊕ обозначает поразрядный оператор ИСКЛЮЧАЮЩЕЕ ИЛИ,  (Wm) обозначает преобразование Фурье m-й функции Уолша.
(Wm) обозначает преобразование Фурье m-й функции Уолша.

В свою очередь, соотношение, выраженное в уравнении (1), опирается на свойство функций Уолша, иллюстрируемое уравнением (2):

Таким образом, если Wn - переданная функция Уолша, то составляющая сигнала для k-го (т.е. не содержащего шум) комплексного выходного сигнала коррелятора 120 является преобразованием Фурье m-й функции Уолша, где m=k⊕n. Это свидетельствует, что n-й выходной сигнал БПА является Фурье-преобразованием нулевой функции Уолша (т.е. функции, где все элементы - единицы).
Выходные сигналы коррелятора 120, имеющие энергию малой погрешности частоты при сложения за сигналом, - это те, которые связаны в значении индекса степенями основания 2. Следовательно, они обладают тем свойством, что для малых погрешностей частоты мнимая часть произведения Фурье-преобразования функции Уолша с наибольшим значением энергии и Фурье-преобразования комплексного сопряжения функции Уолша с более низким значением энергии пропорциональна погрешности частоты контура слежения. Это в общем виде показано уравнением (3), где Im показывает, что берется только мнимая часть комплексного числа,  (Wo)w представляет Фурье-преобразование нулевой функции Уолша, a
(Wo)w представляет Фурье-преобразование нулевой функции Уолша, a  представляет комплексное сопряжение Фурье-преобразования функции Уолша 2k.
представляет комплексное сопряжение Фурье-преобразования функции Уолша 2k.

Следовательно, комплексный выходной сигнал коррелятора 120 с наибольшей энергией сигнала представляет выходной сигнал коррелятора с наибольшей вероятностью соответствия функции Уолша, которая реально была передана при использовании для модуляции информационного сигнала. Как указано выше, вектор корреляции коррелятора 120 содержит составляющие значения, связанные с определенными индексами функций Уолша. Эти парные множества значений используются дискриминатором 130 для определения текущей погрешности частоты и, в конечном счете, остаточной погрешности частоты, как подробно описано ниже.
Б. Работа дискриминатора
Дискриминатор 130 принимает вектор корреляции 122 из коррелятора 120 для каждого повернутого входного сигнала 112, который демодулируется. Как подробно описано выше, этот вектор 122 содержит набор комплексных чисел, парных или связанных с соответствующими индексами Уолша. В общем случае эти комплексные числа упорядочены в соответствии с заранее определенными индексами Уолша. В этом случае обеспечивается косвенная идентификация соответствующего индекса Уолша. Дискриминатор 130 использует значения вектора 122 и соответствующие индексы в качестве входных сигналов для определения текущей погрешности 132 частоты между центральной частотой и вращателем. Это определение включает в себя процесс из нескольких этапов.
Сначала дискриминатор 130 определяет, какой выходной сигнал (БПА) коррелятора 120 имеет составляющую наибольшей энергии сигнала. Как пояснялось выше, этот выходной сигнал представляет наибольшую вероятность того, что была передана конкретная функция Уолша. Дискриминатор 130 ставит в соответствие двоичное представление индекса Уолша, соответствующего этой функции Уолша. Как пояснялось выше, это значение определялось структурой и функционированием коррелятора 120 (либо формировалось, либо предполагалось определенным) и отражается в конфигурации вектора корреляции 122 (посредством заранее определенного упорядочения значений выходных сигналов БПА). Предположим, например, что выходной сигнал коррелятора 122 с наибольшей энергией сигнала соответствует 36-й функции Уолша в заранее определенном множестве из 64 функций Уолша. Тогда индекс Уолша n должен быть равен 35 (W35, начиная с W0), а двоичное представление этого индекса должно соответствовать 100011.
И наконец, дискриминатор 130 вычисляет текущую погрешность 132 контура демодулятора, основываясь на уникальном свойстве функций Уолша. Как пояснялось ранее, выходной сигнал вектора корреляции 122 коррелятора 120 содержит комплексные числа, соответствующие индексам Уолша для каждого декодированного символа Уолша. Кроме того, декодированный выходной сигнал коррелятора с максимальной энергией сигнала, в основном, соответствует выходному сигналу, содержащему наибольшую составляющую сигнала функции Уолша, которая была реально передана. Важно, что, когда инвертируется самый старший разряд (ССР) двоичного представления индекса Уолша для этого выходного сигнала, результирующее представление индекса Уолша отображает выходной сигнал коррелятора, который имеет вторую по величине составляющую декодированного сигнала.
В продолжение предыдущего примера предположим, что выходной сигнал коррелятора для функции Уолша с индексом k=35 обладает наибольшей энергией после декодирования Уолша. В этом случае двоичное значение индекса составляет 100011. Следовательно, выходной сигнал коррелятора, который представляет вторую по величине составляющую переданного сигнала, появляется для k=000011 или индекса Уолша 3 после инверсии ССР.
Это соотношение продолжает действовать по мере того, как инвертируются разряды меньшего порядка. Поэтому выходной сигнал коррелятора с третьей по величине составляющей переданного сигнала соответствует функции Уолша, связанной с двоичным значением индекса Уолша 110011 или десятичным значением 51 (k=51). Аналогично, выходной сигнал коррелятора с четвертой по величине составляющей переданного сигнала соответствует двоичному значению индекса функции Уолша 101011 или десятичному значению 43 (k=43). Это уникальное соотношение, наряду с общими свойствами функций Уолша, проиллюстрированными уравнением (3), позволяет дискриминатору 130 определять текущее значение погрешности частоты 132.
В одном из вариантов осуществления дискриминатор 130 определяет текущую погрешность путем использования выходного сигнала коррелятора с наибольшей энергией сигнала в предположении наиболее вероятно переданной функции Уолша и учета мнимой части произведения этого выходного сигнала комплексно сопряженной величины выходного сигнала коррелятора, соответствующего индексу Уолша, определенного путем инвертирования ССР индекса Уолша с наибольшей энергией. Этот процесс поясняется соотношением, иллюстрируемым уравнением (4):

Поэтому в одном из вариантов осуществления свойства, проиллюстрированные уравнениями (1) и (3), используются для получения дискриминатора, который формирует оценку погрешности частоты, как показано в уравнении (4). В уравнении (4) Х(n) является комплексным выходным сигналом БПА, соответствующим индексу Уолша n, i - индекс Уолша для выходного сигнала коррелятора с наибольшей выходной энергией,  обозначает комплексное сопряжение х, а ⊕ - поразрядный оператор ИСКЛЮЧАЮЩЕЕ ИЛИ (например, i⊕2k - это индекс, полученный путем инверсии k-го значащего разряда в двоичном представлении i), a L - это число терминов в дискриминаторе (например, число между 1 и 6 для модуляции Уолша с использованием 64 функций).
обозначает комплексное сопряжение х, а ⊕ - поразрядный оператор ИСКЛЮЧАЮЩЕЕ ИЛИ (например, i⊕2k - это индекс, полученный путем инверсии k-го значащего разряда в двоичном представлении i), a L - это число терминов в дискриминаторе (например, число между 1 и 6 для модуляции Уолша с использованием 64 функций).
Хотя уравнение (4) представляет один способ оценки текущей погрешности системы демодулятора, важно понять, что возможны многие другие способы оценки, основанные на уникальных свойствах модуляции Уолша, описанных выше. Примеры этих способов приведены ниже. Однако сначала рассматривается работа фильтра 140 в цепи обратной связи и вращателя 110.
Фильтр 140 в цепи обратной связи по существу является накапливающим сумматором/интегратором, включенным в схему для того, чтобы стабилизировать характеристику контура 101 слежения за частотой. В процессе работы выходной сигнал 132 текущей погрешности дискриминатора 130 может содержать достаточно много шума. Поэтому в фильтре 140 в цепи обратной связи можно использовать любое количество традиционных способов для демпфирования характеристики контура 101 слежения за частотой. Различные способы, которые можно использовать, очевидны для специалиста в данной области техники, и поэтому их дальнейшее рассмотрение опускается.
Точно так же, вращатель 110 по существу является устройством сдвига частоты. Вращатель 110 сдвигает частоту любого входного сигнала 102 на величину, равную оценке 142 частоты, подаваемой на вращатель 110. Как и в случае фильтра 140 в цепи обратной связи, вращатель 110 может иметь любое количество обычно применяемых конструкций, известных специалисту в данной области техники.
Способ, используемый контуром 101 слежения за частотой для определения текущей погрешности, также проиллюстрирован в целом на фиг.3. В соответствии с фиг.3 сигнал 112 сдвинутой частоты формируется на этапе 302 вращателем 110 и подается на БПА-коррелятор 120. Устройство формирования вектора корреляции БПА-коррелятора 120 формирует на этапе 304 вектор корреляции 122, который подается на дискриминатор 130. Как подробно пояснялось выше, дискриминатор 130 после этого определяет на этапе 306 энергию сигнала, соответствующую выходному сигналу коррелятора с наибольшей энергией. Индекс этого выходного сигнала используется для образования или формирования на этапе 308 одного или более дополнительных индексов функций Уолша, которые связаны с индексом выходного сигнала коррелятора с наибольшей энергией, как степени с основанием 2. Индексы формируются на этапе 306 путем инверсии одного или более разрядов двоичного представления индекса с наибольшей энергией. Эти индексы используются для оценки погрешности частоты на этапе 310 для получения сигнала 132 ( ) погрешности частоты. Эти индексы указывают значения выходных сигналов (составляющие вектора), используемые для формирования оценки погрешности на основе выходного сигнала (вектора) коррелятора. То есть, речь идет о выходных сигналах, предназначенных для использования при вычислении перекрестных произведений. Как указано здесь, значения индексов Уолша, используемые дискриминатором 130, можно получить путем использования различных способов обработки.
) погрешности частоты. Эти индексы указывают значения выходных сигналов (составляющие вектора), используемые для формирования оценки погрешности на основе выходного сигнала (вектора) коррелятора. То есть, речь идет о выходных сигналах, предназначенных для использования при вычислении перекрестных произведений. Как указано здесь, значения индексов Уолша, используемые дискриминатором 130, можно получить путем использования различных способов обработки.
Как обсуждалось ранее, оценка погрешности частоты, полученная на этапе 310, рассматривается как "текущая погрешность" контура слежения. Оценка погрешности частоты может быть использована в дальнейшем на этапе 312 фильтром 140 в контуре обратной связи для формирования сигнала 142 ( ) оценки смещения частоты, которая известна под названием "остаточная погрешность". Сигнал 142 оценки смещения частоты после этого используется вращателем 110 для регулировки сдвига или вращения входных сигналов.
) оценки смещения частоты, которая известна под названием "остаточная погрешность". Сигнал 142 оценки смещения частоты после этого используется вращателем 110 для регулировки сдвига или вращения входных сигналов.
Средство фильтрации накапливает сигналы результирующей погрешности частоты для получения оценки смещения частоты ("остаточной погрешности"), используемой средством вращения.
На фиг.3 представлена лишь одна возможная схема функциональных элементов способа, используемого для определения текущей погрешности. Альтернативные схемы очевидны для специалиста в данной области техники.
В. Дополнительные способы оценки
Как указано выше, в дискриминаторе 130 можно использовать различные способы для определения текущей погрешности контура 101 слежения за частотой. Кроме способов, используемых в вышеуказанном варианте осуществления, возможны многие другие способы. Выбор того, какой способ использовать, в целом определяется желаемыми рабочими характеристиками контура слежения за частотой. В этой связи отметим, что работоспособность контура слежения за частотой в целом определяется в терминах любой (или обоих) из двух характеристик: (1) характеристики следящей системы в установившемся режиме и (2) полосы затягивания частоты следящей системы.
Характеристика установившегося режима контура слежения за частотой определяется посредством стандартного отклонения погрешности следящей системы в установившемся режиме. Таким образом, при смещениях частоты несущей фактор характеристики установившегося режима указывает, насколько хорошо следящий контур отслеживает эти смещения частоты (в предположении, что контур был заранее настроен на частоту несущей).
Полоса затягивания частоты контура слежения за частотой определяется как полоса частот, в пределах которой контур может первоначально отличаться по частоте несущей и после этого все же устанавливаться на эту частоту несущей. Таким образом, контур с относительно широкой полосой затягивания частоты может воспринимать более значительные различия между частотой следящей системы и требуемой частотой несущей.
Путем изменения способа, который используется дискриминатором 130 для оценки текущей погрешности 132, можно изменять, как это требуется, характеристику установившегося режима и полосу затягивания частоты контура 101 слежения за частотой. Например, когда дискриминатор 130 определяет текущую погрешность 132, используя только индекс Уолша, полученный путем инверсии самого старшего разряда (ССР) индекса Уолша, оцененного как правильный, контур 101 слежения за частотой, как правило, имеет наилучшую характеристику установившегося режима. Однако в этом случае контур 101 слежения за частотой также имеет наименьшую полосу затягивания частоты.
В отличие от этого, когда дискриминатор 130 определяет текущую погрешность, используя только индекс Уолша, полученный путем инверсии самого младшего разряда (СМР) правильного индекса Уолша, полоса затягивания частоты контура 101 слежения за частотой увеличивается. Однако в этом случае характеристика в установившемся режиме существенно ухудшается.
Вместо этого дискриминатор 130 может инвертировать различные средние разряды (например, ССР-1, ССР-2 и т.д.) для получения промежуточных характеристик. Кроме того, в дискриминаторе 130 можно использовать различные схемы усреднения для оценки текущей погрешности. Например, дискриминатор 130 может определять текущую погрешность, используя среднее значение оценок, полученных путем инвертирования более чем одного разряда правильного индекса Уолша. На основании приведенного здесь описания специалисту данной области техники будут очевидны и другие комбинации признаков, помимо тех, которые описаны выше.
Г. Заключение
Из приденного выше описания для специалиста в данной области техники очевидно, каким образом можно реализовать изобретение с помощью других альтернативных вариантов осуществления. Поэтому, хотя выше были описаны различные варианты осуществления настоящего изобретения, следует иметь в виду, что они представлены лишь в качестве примера, а не ограничения. Таким образом, объем настоящего изобретения не должен сводиться ни к одному из вышеуказанных вариантов осуществления, а должен определяться только в соответствии с формулой изобретения и ее эквивалентами.

Изобретение относится к технике связи. Технический результат заключается в повышении эффективности контура слежения за частотой. Для этого контур слежения за частотой включает в себя коррелятор, например устройство быстрого преобразования Адамара, и дискриминатор. Коррелятор формирует вектор корреляции, представляющий собой результат входного сигнала с каждой из множества функций Уолша с соответствующими значениями индекса. Дискриминатор формирует сигнал погрешности частоты на основании выходного сигнала коррелятора с наибольшим уровнем энергии и другие выходные сигналы коррелятора. 6 с. и 30 з.п.ф-лы, 3 ил.

| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
| СИСТЕМА СВЯЗИ С КОЛЛЕКТИВНЫМ ДОСТУПОМ И КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ (СДМА), СИСТЕМА СВЯЗИ АБОНЕНТОВ С ПОМОЩЬЮ БАЗОВОЙ СТАНЦИИ С АБОНЕНТАМИ УДАЛЕННОЙ СИСТЕМЫ, СИСТЕМА МЕСТНОЙ СВЯЗИ И СПОСОБ СОЗДАНИЯ МНОГОЛУЧЕВОГО РАСПРОСТРАНЕНИЯ ПЕРЕДАВАЕМЫХ СИГНАЛОВ СДМА В СИСТЕМЕ СВЯЗИ | 1991 |
|
RU2111619C1 |

