Предшествующий уровень техники
Настоящее изобретение относится в целом к навигационным системам и, в частности, к спутниковым навигационным системам, работающим в среде, подверженной преднамеренным и непреднамеренным помехам.
В последние годы пользователи глобальной системы определения местоположения (GSP) пользуются возможностями трехмерной навигации в режиме реального времени на ранее недоступном уровне качества. Если не считать чувствительности таких систем к непреднамеренным и преднамеренным помехам, в целом им удалось обеспечить обещанную точную спутниковую навигацию по всему миру. Тем не менее, пользователи продолжают требовать все более высокого качества навигации, особенно в отношении точности и достоверности, то есть в отношении способности навигационной системы обнаруживать ложную навигационную информацию.
К сожалению, наличие преднамеренных и/или непреднамеренных помех не позволяет в полной мере полагаться на GPS как на средство навигации, особенно для некоторых военных применений и применений в сфере обеспечения безопасности. Были разработаны различные процедуры на случай аварийных ситуаций для безопасного приземления летательного аппарата на запасных аэродромах. Однако зависимость от GPS в ее нынешнем виде может создать риск широкомасштабного нарушения воздушного сообщения и таким образом коммерческой деятельности в целом. Кроме того, все более широкое проникновение GPS в повседневную инфраструктуру, например в наземные и морские перевозки, а также в распределение электроэнергии по времени, Интернет, сотовые телефоны и финансовые операции, способствует повышению потенциальной уязвимости общества вследствие намеренного нарушения сигнала GPS в результате преднамеренной помехи.
Поскольку сигнал GPS относительно слаб (на терминалах с всенаправленной антенной пользователь принимает приблизительно 160 децибел на один ватт), требуется очень небольшая преднамеренная помеха, чтобы понизить навигационную способность. Например, достаточно недорогого передатчика помех мощностью 5 Вт, чтобы нарушить работу GPS в радиусе нескольких десятков миль, особенно если пользователь находится в зоне прямой видимости. Такая чувствительность свидетельствует против практического применения спутниковой навигации и, напротив, в пользу традиционных высокомощных средств навигации, используемых в авиации, некоторые из которых созданы ранее GPS. в том числе VOR, DME, ILS, TACAN и LORAN-C.
В настоящее время воздушные суда могут использовать GPS только в качестве вспомогательного средства навигации. Традиционных средств навигации достаточно для обычной работы и они обладают уровнем мощности, достаточным для обеспечения устойчивости к передатчикам помех, если бы с их помощью кто-то вознамерился нарушить коммерческие перевозки. Таким образом, из-за уязвимости сигнала GPS имеется мало стимулов воспользоваться значительными преимуществами спутниковой навигации, заключающимися в качестве и дешевизне. Принятые Федеральным авиационным управлением широкозонная усиливающая система (WAAS) и узкозонная усиливающая система (LAAS) обладают потенциальной возможностью обеспечивать дешевой системой посадки воздушных судов тысячи аэропортов по всей стране, что раньше было недоступно. В настоящее время Соединенные Штаты оплачивают две гражданские навигационные системы обеспечения безопасности: традиционную наземную систему и более новую и обладающую более широкими возможностями спутниковую систему.
Для борьбы с преднамеренными помехами имеется несколько способов, известных из уровня техники. Сущность этих способов заключается в (i) специальной конструкции спутника и (ii) конструкции приемника. Например, на спутнике всегда можно просто повысить общий уровень передаваемой на землю мощности. Однако за уровень мощности требуется заплатить определенную цену: каждый дополнительный ватт мощности увеличивает массу полезного груза спутника и соответственно стоимость запуска, так что значительное увеличение передаваемой мощности быстро становится слишком дорогим. Другой подход заключается в использовании более широкой полосы частот, что может обеспечить дополнительный выигрыш в отношении сигнал - помеха при обработке сигнала. Но и здесь требуется заплатить определенную цену: эффективное использование конечного спектра для множества целей требует значительного согласования во всемирном масштабе. Для GPS выделена определенная полоса частот и маловероятно, что когда-либо в обозримом будущем для нее будет выделена новая полоса частот.
Подходы к проблеме преднамеренных помех, относящиеся к конструкции приемника, в целом можно разделить на три категории: (i) формирование диаграммы направленности антенны; (ii) вырезание сигнала и (iii) усреднение. Для формирования диаграммы направленности антенны используются адаптивные многоэлементные комбинированные антенны, называемые антеннами с регулируемой диаграммой направленности (CRPA), где луч диаграммы направленности электронным образом направляется точно на спутник и тем самым исключается влияние передатчика помех. CRPA может также создавать провал в диаграмме направленности в предполагаемом направлении передатчика помех. В большинстве случаев CRPA могут быть весьма эффективными, хотя в целом они весьма дороги и громоздки. Кроме того, они обладают недостатком, заключающимся в том, что они становятся менее эффективными, когда линия визирования источника помех почти совпадает с линией визирования спутника или, что еще хуже, когда используется несколько распределенных источников помех. В этом случае законы физики создают математическое ограничение на количество и качество лучей и провалов, которые могут применяться в отношении набора источников помех для данной конструкции CPRA.
Под вырезанием понимается обработка широкополосного, докорреляционного сигнала, выполняемая в приемнике GPS. Поскольку характеристики сигнала GPS известны, то всякая избыточная мощность непосредственно наблюдается приемником в режиме реального времени и может быть вырезана посредством узкополосных режекторных фильтров, бланкирования импульсов или любыми другими более изощренными способами. Вырезание является эффективным и недорогим этапом обработки сигнала и его выполнение должно быть, как правило, общепринятой практикой. Однако самого по себе этого недостаточно для исключения всех эффектов шумовых и преднамеренных помех. Например, если источник преднамеренной помехи представляет собой широкополосный шум, приемник обнаружит наличие преднамеренной помехи, но не сможет применить вырезание для избирательного удаления какой-либо его части, если его характер заранее неизвестен. Существующие способы обработки сигнала, известные под названием пространственно-временная адаптивная обработка (STAP) и пространственно-частотная адаптивная обработка (SFAP), сочетают CRPA и вырезание в одном этапе обработки.
Способ усреднения направлен на фильтрацию как можно большего количества преднамеренных помех во время додетекторного интервала (PDI) приемника. Наиболее простая форма усреднения представляет собой выигрыш в отношении сигнал - шум в результате обработки, равный отношению докорреляционной полосы пропускания (20,46 МГц) к додетекторной полосе пропускания приемника (обычно 50 Гц). Для приемника, использующего Р(Y)-код, усреднение обеспечивает защищенность от преднамеренных помех на базовом уровне 56 дБ, да и то лишь в случае очень низкой динамики. Попытки улучшить этот уровень защищенности традиционно сталкивались с несколькими препятствиями на пути практического воплощения. Первое препятствие связано с тем, что модуляция данных, передаваемых со скоростью 50 бит в секунду, накладывается на несущую GPS. Такая модуляция фактически ограничивает величину PDI длительностью в 20 мс.
Одним способом, применяемым для попытки обойти ограничение в 20 мс для PDI, является расслоение данных. Поскольку сообщение, передаваемое GPS, меняется нечасто или предсказуемым образом, зачастую возможно использовать заранее записанные кадры для удаления большей части модуляции данных. К сожалению, в военной сфере и в сфере обеспечения безопасности на этот способ не всегда можно полагаться, поскольку заранее записанное сообщение данных не всегда соответствует фактическому передаваемому сообщению. Согласованность двух потоков данных может нарушиться под действием ряда факторов, включающих загрузку новых эфемерид, эксплуатационных ошибок и отказов системы. Любая несогласованность не способствует улучшению эксплуатационных качеств. Основное усовершенствование способа расслоения данных заключается в том, что спутники на низкой околоземной орбите (LEO) могут обеспечить глобальную упреждающую подачу битов данных GPS для устранения каких бы то ни было разрывов в работе. См., например, патентную заявку США №10/873,581, озаглавленную "Данные в режиме реального времени, способствующие повышению качества работы GPS", поданную 22 июня 2004 г.
К сожалению, вне зависимости от того, удалены ли данные из несущей GPS, остаются значительные препятствия при попытке сузить додетекторную полосу пропускания или использовании измерений низкого уровня сигнала. Сигналы GPS состоят из множества компонент, включающих в себя модуляцию псевдослучайным кодом и несущую частоту. В отсутствие непреднамеренных или преднамеренных помех приемники обычно отслеживают как код, так и несущую. В случае преднамеренной помехи большинство военных приемников прекращают отслеживание несущей и переходят к той или иной форме отслеживания только кода, при которой исходные додетекторные отсчеты длительностью 20 мс перемножаются с использованием колебаний дискриминатора скалярного произведения. Дискриминатор скалярного произведения считается в целом одним из наиболее эффективных дискриминаторов квадратичного типа. Эти отсчеты усредняются по продолжительному интервалу, достигающему порой нескольких десятков секунд, с целью устранения ошибки отслеживания кода. Наиболее широко используемое достоинство отслеживания кода на основе скалярного произведения заключается в том, что оно имеет несколько более высокую устойчивость к преднамеренным помехам по сравнению с отслеживанием только несущей. Идея заключается в том, чтобы использовать для вычитания динамики пользователя инерциальную навигационную систему (ИНС), тем самым обеспечивая усреднение зашумленных последетекторных отсчетов на продолжительном интервале. Наиболее комплексная версия устойчивого к помехам отслеживания на основе кодов называется "сверхжесткая связь" (UTC).
К сожалению сверхжестко связанные инерциальные системы являются эффективными только до определенного уровня защиты. Физические принципы, лежащие в основе таких систем, быстро ограничивает их способность противостоять значительным преднамеренным помехам. Во-первых, из-за квадратичных потерь, возникающих в дискриминаторе, требуется более длительное время интегрирования. Время интегрирования пропорционально квадрату отношения помеха - сигнал. Это означает, что при каждом удвоении мощности преднамеренных помех требуемая длительность интегрирования должна возрастать в четыре раза. Во-вторых, инерциальные приборы дают ошибки, которые со временем возрастают. Хотя некоторые инерциальные приборы могут обеспечить более высокое качество за более высокую цену, существуют практические физические пределы для промежутка времени, в течение которого инерциальный прибор может устранять динамику платформы, не требуя обновленных данных от GPS. Этот предел обычно определяется временем, которое требуется инерциальному шуму для достижения значительной части элемента кода, обычно около 5 м. При заданном качестве инерциальной системы зависимость от модуляции кода GPS дает определенный уровень преднамеренных помех, при котором ошибка по дальности превышает в процессе интегрирования некоторый порог и система становится бесполезной.
В предположении, что модуляцию данных GPS можно надежно удалить из несущей, иногда рассматривалась возможность согласованного отслеживания несущей, но такой вариант обеспечения повышенной помехозащищенности быстро отвергался. Такой поход традиционно считался непрактичным, поскольку приемник должен интегрировать несущую на стабильном интервале, причем стабильность не должна быть хуже 30 пикосекунд (промежуток времени, за который свет проходит 1 см). Трудность состоит в том, чтобы поддерживать требуемую стабильность при длительности интервала, превышающей 20 мс. В настоящее время основой подавляющего большинства GPS-приемников является типичный недорогой термостабилизированный кварцевый генератор (ТСХО). Стоимость этого элемента обычно находится в диапазоне от 10 до 20 долларов. При помощи ТСХО додетекторный интервал можно спокойно увеличить до большой доли секунды. Кроме того, ТСХО не обладает достаточной стабильностью.
Другими кандидатами являются более стабильные экзотические тактовые генераторы, такие как термостатированный кварцевый генератор или атомные часы на основе рубидиевого или цезиевого стандарта частоты, но даже эти высокостабильные тактовые генераторы вызывают такие трудности на практике, которые делают их непрактичными. Для обеспечения дополнительной помехозащищенности GPS на величину 30 дБ пользователю необходимо осуществлять интегрирование в районе 20 секунд. На этом уровне даже многие атомные часы не способны обеспечить необходимую стабильность. Вибрация, размеры и стоимость могут стать запредельными. Новый перспективный подход к созданию атомных часов микросхемного масштаба (CSOC) предполагает потенциальное сокращение через несколько лет стоимости, размеров, веса и мощности, но даже самые оптимистичные прогнозы относительно рабочих характеристик не дают достаточной стабильности частоты для обеспечения требуемой стабильности фазы на протяжении требуемого интервала. Некоторые термостатированные кварцевые генераторы (ОСХО) обладают требуемой стабильностью фазы на протяжении требуемого интервала. Однако такой ОСХО, как правило, громоздок, дорог и обладает большим энергопотреблением. Решение, основанное на таких высокостабильных эталонах времени, можно реализовать, только если не ограничивать стоимость, размеры, вес и энергопотребление, связанные с обеспечением точной регулировки температуры. Такое решение с сильной зависимостью от характеристик компонентов представляет собой сложную техническую задачу. Мощность, вибрация и стоимость становятся основными препятствиями. Требуется решение, которое могло бы обеспечить существенное улучшение рабочих характеристик при использовании стандартного недорогого ТСХО.
В военной, гражданской и коммерческой сферах существуют свои собственные проблемы, связанные с преднамеренными помехами, и способы их обойти. Военные обычно наиболее подготовлены для борьбы с преднамеренными помехами, поскольку они менее ограничены в средствах и имеют доступ к наиболее передовым технологиям. К сожалению, даже относительно маломощные источники преднамеренных помех способны нарушить работу пользовательского оборудования, находящегося от источника помех в пределах прямой видимости. В пользовательском оборудовании используется широкий спектр средств борьбы с помехами, часто в виде сочетания различных способов, включающих в себя CRPA и сверхжесткую инерциальную связь. Военные также предлагают ввести новый высокомощный сигнал в М-коде, который, как предполагается, увеличит мощность сигнала приблизительно на 20 дБ. Узконаправленные антенны с большой апертурой будут фокусировать более компактный луч на определенные области Земли с тем, чтобы сосредоточить на этих областях более высокую мощность сигнала. Однако даже если стоимость размещения такой высокомощной системы не является препятствием, пройдет еще много лет, прежде чем такая система станет доступна для использования. Поэтому требуется недорогое, немедленно реализуемое навигационное решение.
Представляется, что вышеприведенные решения, предложенные военными, если взять их в совокупности, обеспечивают разумную защищенность от многих типов преднамеренных помех, предсказываемых в ближайшем будущем. Однако эти решения могут также не оправдать ожиданий в случае реализации будущих вариантов создания преднамеренных помех, особенно, как указывалось выше, в отношении большого числа маломощных распределенных источников помех. Возможно, наибольшее значение имеет то, что описанные выше существующие решения имеют тенденцию быть дорогостоящими.
Уязвимость в гражданской сфере является значительной проблемой. Как указывалось выше, GPS уже имеет средства противостоять непреднамеренным помехам посредством добавления второй гражданской частоты. Поскольку для выполнения многих операций требуется только одна частота, то если одну частоту нельзя использовать из-за непреднамеренной помехи, другая с высокой вероятностью обеспечивает возможность работы. В качестве последнего средства воздушное судно при наличии непреднамеренной или преднамеренной помехи может уйти на запасной аэропорт.
С преднамеренными помехами дела обстоят значительно хуже. И в этом случае цель заключается в том, чтобы не позволить источникам помех систематически нарушать воздушное движение, что нарушило бы повседневную коммерческую деятельность. Коммерческий характер гражданской авиации требует, чтобы любое решение проблемы преднамеренных помех было экономически целесообразным. Предложение об установке на гражданских воздушных судах дорогостоящего пользовательского оборудования, взятого у военных, было воспринято отрицательно. До сих пор единственным жизнеспособным решением было продолжение эксплуатации существующих навигационных средств, таких как VOR, DME и ILS, которые работают на повышенной мощности. Поскольку спутниковые решения, такие как WAAS, не дают лицам, использующим авиацию, никаких дополнительных преимуществ, так как при этом существующие наземные средства также продолжают работать, у авиакомпаний имеется мало стимулов для перехода к спутниковой навигации.
Коммерческие пользователи также заинтересованы в сигнале, не искаженном помехами. Помимо возрастающей зависимости от GPS различных коммерческих функций в обществе, в том числе синхронизации Интернета, энергосистем, сотовых телефонных сетей и финансовых операций, существует также потенциальная угроза для интенсивности сигнала GPS, связанная с нормативной деятельностью, которая исходит от сверхширокодиапазонной (UWB) технологии. Хотя у UWB имеются большие перспективы, существует явная возможность помех, если диапазон GPS не будет надежно защищен с нормативной точки зрения. Если учесть, что иногда может потребоваться время для обеспечения согласованности нормативных актов, было бы желательно иметь доступ к экономичным техническим "предохранительным мерам", которые позволили бы пользователям защитить свои вложения в критическую инфраструктуру на основе GPS во время решающего перехода к сосуществованию с устройствами UWB.
В целом существующие системы и способы обеспечения помехозащищенности являются неудовлетворительными. Требуется навигационная система, которая обеспечивает высокую точность и надежность навигации при наличии шумовых и (или) преднамеренных помех, тем самым обеспечивая значительную и эффективную помехозащищеность в ближайшем будущем для широкого спектра применений, относящихся к GPS и спутниковой навигации, в том числе в военной, гражданской и коммерческой сферах.
Краткая сущность изобретения
Системы и способы, реализуемые в соответствии с настоящим изобретением, используют в целом сеть наземных опорных станций и спутников на низкой околоземной орбите (LEO) в сочетании с одним или несколькими спутниками GPS. Устанавливаются первые геометрические характеристики спутника GPS, находящегося в пределах общей видимости опорной станции и пользователя. Устанавливаются вторые геометрические характеристики спутника LEO, находящегося в пределах общей видимости опорной станции и пользователя. Наземная станция вырабатывает вспомогательные сигналы в режиме реального времени посредством проведения измерений фазы несущей для сигналов со спутников GPS и LEO. Эта вспомогательная информация передается через спутники LEO к приемнику пользователя на высокой мощности с тем, чтобы проникнуть сквозь окружающие преднамеренные помехи. Приемник пользователя обеспечивает синхронизацию с фазой несущей спутника LEO, демодулирует вспомогательную информацию, затем применяет измерения фазы несущей и вспомогательную информацию для обеспечения продолжительных согласованных измерений сигналов GPS. Тем самым система восстанавливает сигналы GPS, которые в противном случае были бы потеряны из-за преднамеренных помех. Таким образом, настоящее изобретение обеспечивает значительное улучшение помехоустойчивости при стоимости, размерах, весе и энергопотреблении, сравнимых с теми, что имеются у обычных GPS-приемников.
В соответствии с одним вариантом выполнения настоящего изобретения навигационная система включает в себя опорный приемник; приемник пользователя; спутник глобальной системы определения местоположения (GPS), находящийся в пределах общей видимости опорного приемника и приемника пользователя, причем указанный опорный приемник и указанный приемник пользователя принимают зондирующий сигнал несущей частоты от спутника GPS; первый спутник на низкой околоземной орбите (LEO), находящийся в пределах общей видимости опорного приемника и приемника пользователя, причем опорный приемник и приемник пользователя выполнены с возможностью вычисления соответствующих первого и второго измерения зондирующего сигнала несущей частоты LEO; приемник пользователя выполнен с возможностью приема через спутник LEO первого измерения от опорного приемника и применения первого и второго измерений для построения априорной оценки фазы сигнала для зондирующего сигнала несущей частоты GPS, принятого приемником пользователя, причем эта априорная оценка используется в качестве основы для продолжительного интегрирования зондирующего сигнала несущей частоты в приемнике пользователя.
Краткое описание чертежей
Дальнейшее описание настоящего изобретения сопровождается нижеследующими чертежами, на которых одинаковые номера позиций обозначают одинаковые элементы и которые включают в себя:
Фиг.1 - схематический общий вид примерной архитектуры приемника пользователя в соответствии с настоящим изобретением.
Фиг.2 - схематический общий вид с изображением работы системы в соответствии с настоящим изобретением.
Фиг.3 - схематический общий вид сети опорных станций в соответствии с настоящим изобретением.
Фиг.4 - функциональная блок-схема приемника в соответствии с одним вариантом выполнения настоящего изобретения.
Фиг.5 - функциональная блок-схема приемника и антенны с управляемой диаграммой направленности (CRPA).
Фиг.6 - функциональная блок-схема приемника и электронного модуля многолучевой антенны с управляемой диаграммой направленности в соответствии с настоящим изобретением.
Фиг.7 примерная конфигурация приемника в соответствии с одним вариантом выполнения настоящего изобретения.
Фиг.8 - схематический общий вид примерного процесса расслоения данных.
Фиг.9 - схематический общий вид примерного процесса переноса времени.
Фиг.10 - функциональная блок-схема примерного низкоорбитального (LEO) коррелятора.
Фиг.11 - функциональная блок-схема примерного коррелятора GPS.
Фиг.12 - функциональная блок-схема примерного процесса навигации.
Фиг.13 - функциональная блок-схема процесса удлинения интервала.
Фиг.14 - функциональная блок-схема обобщенного фильтра Калмана.
Фиг.15 - блок-схема последовательности операций с изображением примерного процесса обновления.
Фиг.16 - график с изображением примерного цикла ошибок.
Фиг.17 - схематический общий вид навигационной системы с движущейся опорной станцией.
Фиг.18 - схематический общий вид системы, иллюстрирующий связи между LEO.
Подробное описание
Нижеследующее подробное описание имеет исключительно иллюстративный характер и не должно восприниматься в качестве ограничения изобретения или применения или использования изобретения. Кроме того, отсутствует какое-либо намерение связывать изобретение какими-либо явно выраженными или подразумеваемыми теоретическими соображениями, изложенными выше в разделах, относящихся к области техники, уровню техники и сущности, или в нижеприведенном подробном описании.
В настоящем документе изобретение может быть описано с точки зрения функциональных и/или логических компонентов и различных этапов способа. Следует иметь в виду, что такие компоненты могут быть реализованы в виде любого количества аппаратных, программных и/или аппаратно-программных компонентов, выполненных с возможностью выполнять определенные функции. Например, в варианте выполнения изобретения могут применяться различные компоненты интегральных схем, такие как элементы памяти, антенны, элементы обработки цифровых сигналов, логические элементы, просмотровые таблицы или тому подобные компоненты, которые могут выполнять различные функции под управлением одного или нескольких микропроцессоров или других управляющих устройств. Кроме этого, специалистам в данной области техники должно быть понятно, что настоящее изобретение может использоваться в сочетании с любым числом протоколов передачи данных и что система, описанная в настоящем документе, является лишь одним приведенным в качестве примера применением изобретения.
Для краткости традиционные способы, относящиеся к обработке сигналов, передаче данных, передаче сигналов, глобальным системам позиционирования, спутникам, управлению сетями и других подобным функциональным аспектам систем (и отдельным рабочим компонентам систем), могут подробно не описываться в настоящем документе. Кроме того, соединительные линии, приведенные на различных чертежах, содержащихся в настоящем документе, предназначены для представления примерных функциональных связей и/или физических соединений между различными элементами. Следует заметить, что в практически реализуемом варианте выполнения может иметься множество альтернативных или дополнительных функциональных связей или физических соединений.
На Фиг.1 приведен общий вид компонента приемника пользователя в соответствии с одним вариантом выполнения настоящего изобретения, а на Фиг.2 - общий вид навигационной системы 200, на примере которой можно проиллюстрировать работу настоящего изобретения. Как показано на Фиг.2, пользователь 202 пытается использовать один или несколько спутников 206 GPS, находясь в среде 204, подверженной преднамеренным и (или) непреднамеренным помехам. В системах, известных из уровня техники, наличие преднамеренных помех в среде 204 ограничивает или даже исключает использование спутников 206 GPS. Однако в соответствии с настоящим изобретением пользователю 202 через спутник 222 на низкой околоземной орбите (LEO) передается вспомогательная информация 220, 224, которая способствует восстановлению сигналов 208 GPS.
За пределами зоны преднамеренных помех размещены и установлены одна или несколько опорных станций 210, так чтобы они находились в пределах прямой видимости для спутников 206 GPS и не подвергались воздействию непреднамеренных или преднамеренных помех (в том числе непреднамеренных и преднамеренных помех, имеющих место в среде 204). Вспомогательная информация 220 от опорного приемника или приемников 210 передается на один или несколько спутников 222 на низкой околоземной орбите (LEO). Сигнал 224 со спутников LEO предпочтительно передается с достаточно высокой мощностью с тем, чтобы перекрыть мощность преднамеренной помехи в среде 204, так чтобы его мог принять пользователь 202. Вспомогательная информация 220, 224, ретранслируемая спутниками 222 LEO, принимается приемником 100 пользователя, как показано на Фиг, 1, а затем применяется к сигналу GPS с тем, чтобы позволить приемнику 100 пользователя специальной конструкции восстановить пригодный для использования сигнал GPS, несмотря на преднамеренные или непреднамеренные помехи.
Приемник 100 пользователя, приведенный на Фиг.1, обеспечивает поток данных в режиме реального времени по всем следящим каналам, чтобы с высокой точностью обеспечить поступление вспомогательной информации в корреляторы в режиме реального времени, например с точностью на уровне сантиметров. Эта способность обеспечивать позиционирование и синхронность на уровне сантиметров позволяет приемнику согласованно отслеживать сигналы GPS в течение продолжительных периодов.
В отличие от традиционных способов обеспечения помехоустойчивости в настоящем изобретении основной упор делается на компонент, относящийся к синусоидальному сигналу несущей частоты GPS, нежели на псевдослучайный код. Для этого способа не имеет значения, используется ли гражданский код С/А или военные коды P(Y) или М. Эти коды используются для дифференциации спутниковых сигналов и инициализации работы. Помимо этого синусоидальная несущая обеспечивает существенные характеристики, предоставляя одновременно (i) значительно улучшенную помехоустойчивость, благодаря устранению квадратичных потерь, и (ii) значительно улучшенную точность, обеспечивая точное определение дальности в условиях преднамеренных помех.
В соответствии с предпочтительным вариантом выполнения настоящего изобретения вводится избыточность в виде по меньшей мере двух опорных станций и двух спутников LEO, так чтобы выход из строя любой части системы не повлиял на ее работу. Более конкретно, как показано на Фиг.3, в двухплечевом варианте изобретения 300 используется пара спутников LEO 222(a) и 222(b) и опорных станций 210(а) и 210(b), чтобы обеспечить постоянную доступность опорной информации для спутников 206 GPS, находящихся в пределах видимости пользователя 202.
Спутники 222 LEO могут быть любыми спутниками, находящимися на низкой околоземной орбите. В предпочтительном варианте выполнения система включает в себя совокупности спутников 222 LEO, так чтобы над головой пользователя 202 был, по существу, всегда по меньшей мере один спутник. Совокупности спутников LEO, пригодные для настоящего изобретения, включают в себя, например, спутники, предлагаемые системами Iridium и Globalstar. Обе эти совокупности спутников LEO предназначены для телефонии, а поскольку в телефонии средняя скорость передачи данных примерно в 100 раз выше номинальной для GPS скорости 50 бит в секунду, этот избыток можно преобразовать в дополнительную мощность передачи. Иными словами, если скорость передачи данных спутника 222 LEO сделать сравнимой со скоростью передачи данных GPS, то мощность сигнала LEO будет на 20 дБ больше мощности сигнала GPS. Если включено множество нисходящих линий связи, что соответствует множеству телефонных звонков, то мощность можно повысить еще больше. Например, если на одну нисходящую линию связи выделено 10 телефонных звонков, то вспомогательный сигнал 224 будет приблизительно на 30 дБ более мощным, чем сигнал GPS. Это означает, что вспомогательный сигнал обладает на 30 дБ более высокой помехоустойчивостью.
Передачу сигналов GPS осуществляет в двух диапазонах: L1 с частотой 1575,42±12 MHz и L2 с частотой 1227,604±12 MHz. Передача в системе Iridium осуществляется в диапазоне от 1616,0 до 1626,5 МГц, а в системе Globalstar - в диапазоне от 2483,5 до 2500,0 МГц. Приемник, способный принимать как сигналы спутника GPS, так и сигналы спутника LEO, обеспечивает высокоточную систему определения местоположения, синхронизации и связи, известную под названием iGPS. Система защиты от помех iGPS может работать с любой частотой GPS или с обеими частотами.
В предпочтительном варианте выполнения используется аналогичный помехоустойчивый приемник iGPS на обеих опорных станциях 210 и в местонахождении 202 пользователя. Примерный приемник 400, основанный на архитектуре программного приемника, приведен на Фиг.4. Благодаря повышенной вычислительной мощности в расчете на кристалл и на единицу стоимости и новым полупроводниковым технологиями, таким как высокоскоростные, маломощные радиочастотные конструкции на кремнегерманиевой основе, программные приемники становится все более просто создать. Результатом является более низкая стоимость, сокращенный срок разработки, меньшие размеры, вес и мощность и в первую очередь чрезвычайная гибкость в отношении соединения компонентов друг с другом и построении более крупных систем. Следует понимать, что в специализированных вариантах изобретения технологии программных приемников может оказаться недостаточно и что может потребоваться конструкция, оптимизированная на основе иных критериев.
Как показано на Фиг.4, приемник 400 включает в себя многочастотную антенну 402, используемую для приема сигналов 401 со спутников. Антенна 402 соединена с одним или несколькими фильтрами 404 предварительного выбора, усилителем 406 и АЦ-преобразователем 408. Синтезатор 413 принимает сигнал от терморегулируемого кварцевого генератора (ТСХО) 410 и соединен, как показано на чертеже, с компьютером 414, инерциальным прибором 412 и АЦ-преобразователем 408. Компьютер 414 принимает исходные данные измерений от инерциального прибора 412, а также входные данные от синтезатора 413 и АЦП 408 для получения выходных данных, характеризующих местоположение, высоту и время (420). Частота дискретизации АЦП 408 предпочтительно выбирается при помощи способа, изложенного в следующей публикации: Mark L.Psiaki, Steven P.Powell, Нее Jung, and Paul M.Kintner, Jr., "Design and Practical Implementation of Multi-Frequency RF Front Ends Using Direct RF Sampling." ION-GNSS, Long Beach, September, 2004. Таким образом, система преобразует в основную полосу частот все представляющие интерес диапазоны.
Правильный выбор частоты дискретизации обеспечивает приемлемое спектральное разделение, охватывающее интервал Найквиста от нуля до половины частоты дискретизации. В предпочтительном варианте выполнения, например в таком, который можно применять в гражданской авиации, антенна 402 является антенной с фиксированной диаграммой направленности (FRPA), что позволяет избежать дороговизны, громоздкости и сложности антенны с управляемой диаграммой направленности (CRPA). Для военных применений - особенно для использования на военных платформах - более желательно, чтобы антенна 402 представляла собой CRPA.
Существует два способа реализации CRPA. Первый - это комплексный подход, приведенный на Фиг.5. В целом, число антенных входов 401 на входном каскаде приемника 400 увеличивается до желательного числа антенных элементов CRPA. С антеннами 401 соединено множество соответствующих АЦП 408, инверторов 406 и фильтров 404. Затем в программном обеспечении, встроенном в компьютер (или в процессор цифровых сигналов) 504, осуществляется STAP/SFAP-обработка 502, как показано на чертеже.
Второй подход заключается в том, чтобы между антенной решеткой и приемником iGPS вставить электронный модуль многолучевой регулируемой антенны (MBS АЕ). Такой вариант выполнения приведен на Фиг.6. Этот модуль немного изменен, чтобы повторять STAP/SFAP-обработку 502 с сигналами LEO так же, как и сигналами GPS. При этом диапазон системы Iridium лежит очень близко к диапазону L1 GPS.
Внутри помехоустойчивого программного приемника iGPS обработка начинается с фильтра 404 предварительного выбора для каждого диапазона GPS (L1 и (или) L2) и для сигнала LEO (такого как Iridium или Globalstar). Поскольку программный приемник 400 может быть сконструирован таким образом, чтобы выполнять непосредственное преобразование с понижением частоты, желательно чтобы фильтры имели резкие границы. Примером требуемых электрических компонентов может служить специализированный радиочастотный чип IBM IBM43GAENGP0001. Этот приемник содержит интегральную кремнегерманиевую микросхему, которая обеспечивает полосу пропускания, автоматическую регулировку усиления (АРУ) и функции непосредственной радиочастотной дискретизации.
В предпочтительном варианте выполнения конструкция приемника обеспечивает выполнение измерений для различных диапазонов в один и тот же интервал дискретизации относительно одной и той же шкалы времени. После преобразования сигнала в цифровую форму архитектура не позволяет ввести межканальное смещение по всем частотам и между спутниками. Это свойство стабильности межканальных смещений в значительной мере способствует проведению высококачественных согласованных измерений и имеет большое значение для степени помехозащищенности. Если в конкретном применении ограниченность размеров конструкции исключает использование непосредственного преобразования с понижением частоты, то можно использовать другие подходы, использующие традиционное преобразование с понижением частоты, если при этом уделяется повышенное внимание обеспечению стабильных систематических погрешностей.
Как показано на Фиг.4, число битов АЦП в АЦП 408 зависит от выбора конструкции. Для борьбы с негауссовыми преднамеренными помехами и для обеспечения предварительной обработки посредством функций STAP/SFAP может понадобиться больше битов.
В соответствии с одним аспектом настоящего изобретения может применяться опорная частота 410, задаваемая простым недорогим ТСХО. Экзотический эталон времени, такой как атомный осциллятор или термостатированный кварцевый генератор, не требуется. Такой ТСХО обычно является весьма стойким, способным выдерживать значительную вибрацию и колебания температуры, и при этом относительно недорогим (а именно порядка 10-20 долларов). Основными свойствами изобретения является то, что оно делает систему и способ в целом в значительной степени нечувствительными к недостаткам эталона времени приемника.
Если приемник предполагается использовать для высокодинамичных применений, он предпочтительно использует какой-либо инерциальный базис 412. С настоящим изобретением совместим любой инерциальный прибор 412 от высококачественных инерциальных приборов, используемых для навигации, до инерциальных систем тактического типа. В предпочтительном варианте выполнения используется инерциальный прибор размером с микросхему. Современные инерциальные приборы размером с микросхему включают в себя микроэлектромеханические системы (MEMS), которые обеспечивают обычно наименьшую стоимость, размеры, вес и энергопотребление. Примером инерциального прибора MEMS служит Honeywell HG-1930. Примером гироскопа MEMS размером с микросхему служит Systron Donner MEMS Gyro LCG50. Примером акселерометра MEMS служит акселерометр Kionix 3-Axis MEMS KXM52-1050.
В предпочтительном варианте выполнения весь приемник 400 iGPS сконструирован на уровне микросхемы, как показано на Фиг.7. А именно плата 702 приемника включает в себя 3-осевой акселерометр 704 размером с микросхему, 3-осевой гироскоп 706 размером с микросхему и различные другие компоненты, например фильтры предварительного выбора, предусилитель, один или несколько АЦП, ТСХО, синтезатор и программируемую вентильную матрицу/компьютер, как описано в связи с Фиг.4-6. Эти компоненты могут располагаться на плате 702 в соответствии с известными технологиями и любым приемлемым образом.
Другим ключевым обоснованием, которое станет ясно из нижеследующего описания, является то, что технология MEMS может также обеспечивать низкий случайный шум - основной источник ошибок для настоящего изобретения. Поскольку iGPS оценивает систематические погрешности в реальном времени, основным оставшимся параметром, характеризующим качество работы, является случайная погрешность, параметр, в котором приборы MEMS обычно показывают превосходные результаты - потенциально даже превосходящие известные из уровня техники измерительные блоки инерциального типа. Кроме того, существуют перспективы дальнейшего развития технологии в микросхемном масштабе. Научно-исследовательские разработки в области конденсатов Бозе-Эйнштейна комнатной температуры и микросхемного масштаба для инерциальных устройств представляются многообещающими. См., например, публикацию Jakob Reichel, "Atom Chips," Scientific American, February, 2005, стр.46.
После проведенного таким образом общего рассмотрения различных компонентов примерного варианта выполнения далее описывается сущность работы изобретения. Во-первых, описывается способ обработки продленного сигнала. Это основа обеспечения высокой помехозащищенности (ПЗ). Затем описывается обработка навигации на системном уровне, которая используется для обеспечения высокой ПЗ. Наконец, подробно описывается предпочтительный вариант выполнения изобретения, обеспечивающий общую систему и способ для практической работы.
Обработка продленного сигнала
В предпочтительном варианте выполнения качество помехозащищенности обеспечивается тремя основными этапами: (i) расслоение данных, (ii) временная синхронизация и (iii) согласованное усреднение. На Фиг.8 приведен первый этап этой последовательности обработки. Желательно удалить данные GPS, которыми модулирована несущая, для пользователя 202, который оказался в зоне 204 сильных помех. Опорная станция 210, находящаяся в пределах прямой видимости спутника 206 GPS, который не подвергается воздействию преднамеренных или непреднамеренных помех, может дать для этого спутника четкую оценку для потока данных GPS со скоростью 50 бит в секунду. Линия 220, 224 связи с LEO используется для передачи данных пользователю 202 по линии связи в режиме реального времени на высокой мощности. Затем пользователь 202 синхронизирует собственный принятый сигнал 208 с потоком 224 данных, принятым от опорной станции 210 через GPS. При смешивании этих двух данных сигнал оказывается полностью очищенным от модуляции с частотой 50 бит в секунду.
Второй этап заключается в том, чтобы синхронизировать эталон времени пользователя с известным репером. Поскольку типичный кварцевый генератор за промежуток времени порядка одной секунды и более сместится на множество длин волн L1 GPS (19 см), невозможно осуществить согласованное интегрирование сигнала GPS в течение такого промежутка времени. Синхронизация эталонов времени осуществляется при помощи спутника 222 LEO для передачи времени от известного источника на опорной станции 210 пользователю 202.
Опорная станция 210 имеет определенный доступ к времени GPS, поскольку она находится в пределах прямой видимости спутника 206 GPS, который содержит точный эталон времени. Поскольку у спутников GPS имеются атомные часы, например, цезиевые часы, сигнал с высокой вероятностью сохранит стабильность с точностью выше 10-12 в течение требуемого 20-секундного интервала усреднения. Однако измерения времени GPS непосредственно от GPS по-прежнему подвержены ошибкам, в том числе ошибкам от часов, эфемерид и атмосферы. В предпочтительном варианте выполнения спутники GPS, которые участвуют в определении местоположения пользователя, находятся в пределах прямой видимости одновременно опорной станции и приемников пользователей. При таком дифференциальном включении время GPS взаимно исключается.
Точное время у пользователя 202 (то есть на приемнике пользователя) первоначально определяется посредством определения дальности в синфазном режиме до спутника 222 LEO, находящегося между опорной станцией 210 и пользователем 202. Уравнение дальности для несущей, передаваемой с пользовательского спутника:
φ=ρ+δρ+τs-τr+b0+ρt-ρi+ρm+ε,
где ρ - оценка расстояния до спутника, δρ - погрешность оценки расстояния, τs - сдвиг эталона времени на спутнике, τr - сдвиг эталона времени на приемнике, b0 - совокупная систематическая ошибка определения дальности (включая целые и вещественные компоненты неоднозначности и все аппаратные задержки), а ρ с индексами t, i и m - это ошибки соответственно из-за тропосферы, ионосферы и многолучевого распространения. Ошибка ε - это вклад шумов приемника.
Многие из этих параметров известны или частично известны заранее (то есть априори). Кроме того, можно без риска предполагать, что многие из этих параметров могут быть ограничены, так что они вряд ли изменятся более чем на сантиметр на 20-секундном интервале. Когда речь идет о фазе несущей GPS, система измерения на основе сантиметра используется взаимозаменяемым образом с 30-пикосекундным стандартом времени, поскольку 30 пикосекунд - это промежуток времени, за который свет проходит один сантиметр. Предполагается, что расположение опорной станции известно с сантиметровой точностью. Для дальнейших расчетов предполагается, что положение спутника LEO и положение пользователя устанавливается первоначально с точностью до 10 см. Однако затем будет показано, что это условие может быть значительно смягчено до нескольких десятков метров и более.
Используя относительную вспомогательную информацию от инерциального прибора пользователя, можно отслеживать относительное положение пользователя с точностью выше одного сантиметра на 20-секундном интервале. Таким образом, относительная точность, полученная посредством определения разности измерения расстояния от пользователя до спутника LEO и измерения опорной станции, определяется следующим выражением:
Верхний индекс относится к передатчику. Нижний индекс относится к приемнику. Наиболее примечательно, что когда пользователь формирует вышеприведенную разность, эталон времени спутника сокращается. Пока мы предполагаем, что эфемериды являются почти идеальными. Впоследствии мы вновь вернемся к этому вопросу.
То что остается от разности, - это члены, характеризующие систематическую ошибку, изменения которых ограничены порядком менее сантиметра на 20-секундном интервале. Как показано на Фиг.9, опорная станция 210 обладает своей собственной несовершенной мерой времени. А именно опорная станция 210 измеряет фазу несущей сигнала со спутника 222 LEO. Затем она передает эти данные измерений пользователю 202 через линию связи 220, 224 спутника LEO. Пользовательское оборудование также проводит измерение фазы несущей сигнала со спутника LEO. Посредством вышеприведенного соотношения пользовательское оборудование может формировать значение разности Δφ для получения точного сдвига между эталонами времени опорной станции и пользователя. В действительности приемник пользователя осуществляет виртуальное восстановление эталона времени опорной станции посредством прибавления Δφ к показаниям эталона времени приемника пользователя.
Следует обратить внимание на несколько аспектов этого подхода. Во-первых, временная точность выше 10-12 на 20-секундном интервале была передана при помощи спутника LEO, у которого нет атомных часов. Спутники систем Iridium и Globalstar содержат пригодные для космических условий кварцевые генераторы, и все же такой уровень передачи времени возможен, поскольку в каждом периоде дискретизации член, содержащий эталон времени спутника, полностью сокращается. Во-вторых, точный уровень знания времени доступен пользователю 202, несмотря на наличие сильных помех. Это возможно потому, что сигнал LEO обладает значительно большей мощностью, чем сигнал GPS. Наконец, точное время оказывается доступным пользовательскому оборудованию без применения экзотических эталонов времени. Пользователю лишь требуется недорогой ТСХО и он может работать в условиях, когда пользователь испытывает значительную вибрацию.
Следующий этап заключается в использовании переданного времени для формирования упреждающего предсказания фазы несущей для каждого отслеживаемого спутника GPS. Поскольку спутники могут быть слишком слабыми для отслеживания их самих по себе, приемник должен воспользоваться вспомогательной информацией для установления систем слежения в пределах сантиметра от ожидаемой фазы. При использовании переноса времени в пределах общей видимости соотношение между фазой спутника GPS, измеренной опорной станцией, и фазой спутника GPS, измеренной пользователем, определяется выражением:
где измеренная разность, скорректированная на движение спутника, оказывается просто разностью между эталоном времени опорной станции и эталоном времени пользователя. Эталон времени спутника GPS сокращается благодаря своей симфазности.
Теперь можно решить вышеприведенное уравнение для априорной оценки фазы несущей GPS, измеренной пользователем,  . Приблизительно с точностью до сантиметра эту величину можно получить из известных величин на основе следующего выражения:
. Приблизительно с точностью до сантиметра эту величину можно получить из известных величин на основе следующего выражения:


Ожидаемая фаза несущей равна сумме опорной фазы, скорректированной на движение спутника GPS и пользователя, и поправки передачи времени, поступающей по линии связи спутника LEO.
Третий этап способа - это согласованное усреднение поступающей несущей GPS относительно вновь сформированной виртуальной стабильной временной базы. Поскольку все коды, несущие и данные GPS были удалены и поскольку был использован инерциально-навигационный блок для удаления оставшегося относительного движения, единственной оставшейся модуляцией несущей GPS должна быть модуляция, связанная с шумами и систематическими ошибками гироскопа и акселерометра:

Член b, характеризующий систематическую ошибку, представляет совокупное значение всех целых и медленно меняющихся электронных систематических ошибок, вносящих вклад в определенную двойную разность. При наличии преднамеренных помех изобретение эффективно обеспечивает оценку этих сигналов систематических ошибок, какой бы слабой ни была несущая, для восстановления этой критической информации. Поскольку эти сигналы предоставляются в виде фазы несущей, они дают значения инерциальных параметров с необычайно высокой, сантиметровой точностью.
Во временной области чем длиннее интервал усреднения, тем меньше остаточный шум, когда сигнал остается постоянным. В частотной области (квазистатическая) синфазная (I) и квадратурная (Q) фаза сверхузкополосной несущей подвергается низкочастотной фильтрации, точно так же, как и в случае с постоянным током. Шум, возникающий вследствие преднамеренных помех, удаляется при прохождении сигнала на нулевой частоте. Количественное описание процесса заключается в том, что остаточный шум после интегрирования определяется формулой белого шума:
Таким способом можно получить значительно более высокую помехозащищенность для GPS. Если мощность LEO достаточна для проникновения вспомогательной информации сквозь преднамеренные помехи и если пользователь обладает инерциально-навигационным блоком, способным поддерживать уход параметров <1 см за 20 секунд, то согласованное время интегрирования сигналов GPS увеличивается с 20 мс до 20 с - улучшается на 30 дБ. Кроме того, это не является жестким верхним пределом настоящего изобретения.
Навигационная обработка на уровне системы
В соответствии с одним вариантом выполнения используется способ сочетания измерений на основе определения двойной разности посредством перебора. Хотя этот подход является иллюстративным, будет показано, что на практике он имеет определенные недостатки по сравнению с описанным ниже предпочтительным вариантом выполнения. В данном примере измеренные значения фазы LEO непосредственно вычитаются из каждого канала GPS до корреляции. Выходные сигналы каждого канала GPS представляют собой разностные значения фазы, давая остаток двойной разности (GPS минус LEO, пользователь минус опорная станция) между действительной и предсказанной фазой сигнала спутника GPS, принятого пользователем.
Инерциальный блок отслеживает положение пользователя. Однако инерциальный блок обычно накапливает ошибку номинального положения вектора в локальной горизонтальной системе координат, связанной с пользователем, для данной оценки номинального положения х0. Измеренные значения фазы могут быть линеаризованы относительно этого номинального локального горизонтального инерциального положения пользователя для нахождения при помощи GPS наилучшей векторной оценки δx ошибки инерциального положения:
где ν - это шум при измерении. Затем мы может определить и перегруппировать члены:

где  - это единичный вектор на указанный спутник в локальной горизонтальной системе отсчета. Поскольку измеренное значение фазы представляет собой двойную разность, никакого компонента, связанного с эталоном времени, не остается. Объединяя однородные члены, получаем:
- это единичный вектор на указанный спутник в локальной горизонтальной системе отсчета. Поскольку измеренное значение фазы представляет собой двойную разность, никакого компонента, связанного с эталоном времени, не остается. Объединяя однородные члены, получаем:

Соединяя измерения разности фаз для n спутников GPS, находящихся в пределах видимости, можно получить следующую систему уравнений:

где 


Для простоты можно предположить, что система запускается и работает при нормальных условиях в отсутствии помех до того, как начинает работать в условиях преднамеренных помех. Однако при наличии достаточных вычислительных мощностей ничто не мешает системе начать работу в условиях преднамеренных помех.
Начальные значения систематических погрешностей могут быть приблизительно установлены при помощи основанного на коде решения для положения x0. После чего проводится замена δx=0,  . С этого момента начинается согласованное отслеживание фазы несущей при помощи инерциального блока для удаления динамических величин с точностью до сантиметра с использованием нижеописанного комплексного подхода. Измеренные значения фазы показывают с точностью до сантиметра, насколько ушли параметры инерционного блока.
. С этого момента начинается согласованное отслеживание фазы несущей при помощи инерциального блока для удаления динамических величин с точностью до сантиметра с использованием нижеописанного комплексного подхода. Измеренные значения фазы показывают с точностью до сантиметра, насколько ушли параметры инерционного блока.
Если предположить, что систематические погрешности являются постоянными, то ошибку положения можно получить при наличии непреднамеренных и (или) преднамеренных помех просто посредством решения системы уравнений для ошибки положения пользователя с использованием аппроксимации методом наименьших квадратов для минимизации функции стоимости:
где 
y=δφ-β
Вектор δx представляет собой оценку ошибки положения относительно х0 после каждого PDI. На практике простой коррекции недостаточно, поскольку эта модель не включает в себя все источники ошибок при описанном выше определении расстояния до спутника. Однако если допустить колебания систематических погрешностей, то изменяющаяся геометрия вследствие движения спутника обычно обеспечивает наблюдаемость как местоположения, так и систематических погрешностей. В зависимости от конкретной геометрии спутника систематические погрешности обычно являются наблюдаемыми и, следовательно, указывают точное положение пользователя. Как правило, при большой угловой скорости движения спутника LEO относительно пользователя геометрия измеряется в достаточной степени, чтобы определить две из трех компонент положения с точностью до сантиметров во временном масштабе порядка одной минуты. Если, как показано ниже, используется два или более спутников LEO, можно определить все три компоненты положения приблизительно за минуту.
В ситуации, когда требуется высокая помехозащищенность, но не требуется сантиметровая точность, система может также позволить поглотить некоторые ошибки моделями состояний ошибок. Такое поведение является оправданным, если характеристики алгоритма оценки минимизируют погрешности в определении ошибки. Поэтому алгоритмы оценки обычно работают с разумной точностью даже при наличии умеренных оценок моделирования. Элементарный метод фильтрации также способен поглотить источники медленно меняющихся ошибок, носящих систематический характер, в том числе, в частности, ошибки положения пользователя, опорной станции и спутника, атмосферные и ионосферные смещения, и ошибки, связанные с многолучевым прохождением сигнала. Например, можно показать, что ошибка δr определения координат спутника LEO создаст синфазную систематическую погрешность в вышеприведенном уравнении уравнивания результатов наблюдения:

Измененное решение методом наименьших квадратов для одного периода дискретизации принимает вид:

Вычитая первоначальную невозмущенную функцию стоимости, получаем:
где аргумент сводится к нулю, поскольку

Тот же самый результат получается для его производных по времени. В целом, если пользователь готов допустить умеренные отклонения от сантиметровой точности при помехозащищенной работе, то такое решение обеспечивает доказательство существования частоты изменения синфазной систематической погрешности, что обеспечивает продленное интегрирование на интервале, требуемом для обеспечения помехозащищенности. Иными словами, можно обеспечить автоматическое приспосабливание к различным источникам ошибок. Суть в применении алгоритма оценки, который может отслеживать синфазную компоненту смещения так, чтобы успешно обеспечивать продленные додетекторные интервалы при наличии преднамеренных помех.
Архитектура предпочтительного варианта выполнения
В предпочтительном варианте выполнения основная часть обработки сигнала выполняется в программном приемнике и это обстоятельство предполагается при последующем рассмотрении. Однако изобретение может быть реализовано с использованием любого сочетания аппаратных и программных средств в зависимости от того, что является наиболее приемлемым при конкретных обстоятельствах.
На Фиг.1 приведено наиболее общее представление предпочтительной структуры обработки. Архитектура в значительной степени опирается на точные упреждающие оценки фазы несущей частоты для приемников системы и должна обеспечивать своевременное и точное прохождение сигналов через приемник пользователя. Эти вспомогательные сигналы вырабатываются навигационным процессором 110 на априорной основе. Как только эти сигналы становятся доступны приемнику, может осуществляться фиксация условий преднамеренных помех.
Обработка сигналов на чертеже осуществляется, как правило, в направлении слева направо. На первом этапе осуществляется вырезание, осуществляемое модулями 104 (а)-(с) STAP (или SFAP). Поскольку в каждом входном диапазоне будут существовать свои собственные помеховые условия и антенные систематические погрешности, свой собственный модуль 104 STAP работает в каждом диапазоне, а именно в диапазонах GPS LI, GPS L2 и LEO. Каждый модуль 104 STAP снабжается упреждающими данными о пространственном положении летательного аппарата, поскольку адаптивное формирование диаграммы направленности является более эффективным, если пространственное положение летательного аппарата известно.
Следующий блок системы - это совокупность каналов 106 (а)-(с) слежения, по одному для каждого сочетания спутника и диапазона. Предпочтительно выделяются достаточные ресурсы обработки для обеспечения по меньшей мере 12 каналов спутника GPS для каждого диапазона, L1 и L2, и по меньшей мере 3 каналов LEO. Каждый канал принимает упреждающий сигнал от обобщенного калмановского фильтра 108 на частоте 50 Гц, содержащего априорную оценку входящей фазы приемника.
В отличие от традиционного приемника GPS, в котором каждый канал обладает выделенной системой слежения, в предпочтительном варианте выполнения создается централизованный регулятор в обобщенном калмановском фильтре 108. Этот блок системы может выдавать более 40 унифицированных параметров состояния, моделирующих каждый коррелятор, инерциальную навигационную систему, совокупное состояние системы слежения и эталон времени пользователя.
На Фиг.10 приведен пример коррелятора для спутника LEO. В целом коррелятор 1000 включает в себя кодогенератор 1004, функциональный блок 1006, блок 1007 таймера битов и генератора кадров, сумматоры 1008, блок 1010 стирания данных и блок 1012 интегратора, соединенные друг с другом, как показано на чертеже, причем блоки 1004, 1006 и 1007 принимают различные команды и данные 1009, описание которых приводится ниже.
Система слежения обеспечивает синхронизацию с несущей, синхронизацию битов и синхронизацию кадров, а также демодуляцию данных. В этом отношении комплексные отсчеты 1002 сигналов обрабатываются слева направо. Для совокупностей спутников LEO с расширенным спектром, таких как CDMA Globalstar, упреждающий код лишен поступающего сигнала. Затем упреждающие данные о поступающей фазе несущей преобразуются в комплексное вращение, которое развертывает поступающий разностный сигнал, модулированный данными, преобразуя его с понижением частоты к основному диапазону частот.
Для синхронизации битов применяется алгоритм Гарднера с созданием дискриминатора на основе трех последовательных интервалов интегрирования, разделенных полупериодом символа. Для синхронизации кадров применяется поиск заданной последовательности символов. Для слежения за несущей данные квадратурной фазовой модуляции затем стираются. Через определенный интервал в кадре каждый спутник LEO передает данные. Канал предназначен для интегрирования этой энергии в компоненты слежения за ошибками синфазной (I) и квадратурной (Q) фазы несущей (1014). Необработанные I и Q поступают в навигационный препроцессор (позиция 110 на Фиг.1) для преобразования угла ошибки слежения за фазой несущей и встраивания в обобщенный калмановский фильтр (позиция 108 на Фиг.1). Необработанные выходные данные LEO имеют обычно частоту 10 Гц или более высокую даже в условиях сильных помех из-за высокой мощности передачи спутников LEO.
На Фиг.11 приведена примерная архитектура 1100 коррелятора GPS, которая в целом включает в себя генератор сигналов 1008 с числовым управлением, кодовый генератор 1010 и интеграторы 1004 и 1006, сконфигурированные как показано на чертеже. И в этом случае комплексные отсчеты 1002 сигналов обрабатываются слева направо. Сначала сигнал подвергается стиранию кода и упреждающей несущей посредством вращения и точного преобразования несущей с понижением частоты почти в точности до нулевой частоты. Упреждающие поправки вырабатываются навигационным процессором (позиция 110 на Фиг.1) и состоят из вкладов от оценки эталона времени пользователя (косвенным образом выведенной по отслеживанию LEO), потоковых упреждающих эфемерид и мгновенной оценки положения пользователя, выполненной инерциальной навигационной системой и обновляемой посредством GPS. На этом этапе остаточная несущая является по существу квазистатической. Все фазовое вращение было фактически удалено, за исключением остаточной систематической погрешности и модуляции данных GPS со скоростью 50 бит в секунду.
Как показано на Фиг.11, два полуканала группируются вместе для образования полного канала слежения с измеренными значениями кода и синфазной и квадратурной составляющих несущей. На генератор псевдослучайного кода верхнего полуканала подается команда выдать значение раннего минус позднего (E-L) кода 1020, тогда как на нижний полуканал подается команда выдать точный код 1020. Весь выходной сигнал коррелятора канала направляется в навигационный препроцессор (позиция 110 на Фиг.1) для включения в навигационное решение.
На Фиг.12 приведены примерные функции навигационной поддержки. На этом чертеже схематически приведены различные операции, выполняемые системой 1200 над поступающими данными 1201. В целом система 1200 включает в себя следующие функциональные блоки: вспомогательный блок 1208 данных GPS, блок 1206 расслоения данных и продленного сохранения, блок 1202 декодирования, блоки 1210 ошибок определения дальности, блок 1212 атмосферной коррекции, блок 1214 потоковых опорных данных, блок 1216 генерации эфемерид, блок 1218 эфемерид LEO для ECEF и блок 1216 эфемерид GPS для ECEF. Навигационный препроцессор использует необработанные синфазные и квадратурные составляющие от корреляторов для двух основных целей: (i) для генерации потоковой упреждающей вспомогательной информации и (ii) преобразования измерений дальности.
Для упреждающей функции навигационный препроцессор декодирует поток данных, поступающих со спутников LEO (1202). Эти данные содержат закодированное сообщение, которое можно использовать для получения (i) вспомогательного потока упреждающих данных GPS со скоростью 50 бит в секунду, (ii) наземных опорных измерений и (iii) потоковых упреждающих предсказаний эфемерид.
Для преобразования измерений дальности необработанные измерения синфазной и квадратурной составляющих преобразуются из необработанной формы в ошибки 1204 по дальности. Поскольку сигналы GPS весьма слабы в случае преднамеренных помех, синфазные и квадратурные составляющие сигнала сначала накапливаются в блоке 1206, описание которого приводится ниже. Затем и синфазные и квадратурные составляющие сигналов LEO и GPS преобразуются в ошибки по дальности по следующим формулам:
Фазовая ошибка по дальности: Δφ=arctg2(QP,IP)
Кодовая ошибка по дальности: 
Хотя в настоящем изобретении основное внимание уделяется фазе несущей, важно отметить, что квадратичные потери, связанные с рассмотренным ранее кодовым дискриминатором дальности, не относятся к представленному здесь новому согласованному кодофазовому дискриминатору. В отличие от дискриминатора, использующего только код, когда интервал усреднения возрастает пропорционально квадрату отношения помеха - сигнал, настоящий дискриминатор уменьшает интервал усреднения просто до пропорционального отношению помеха - сигнал. Это приводит к кардинальному улучшению характеристик работы.
Получившийся согласованный приемник полностью использует преимущества как кодовой, так и фазовой характеристик. До тех пор пока приемник сохраняет синхронизацию с несущей, даже в условиях сильных помех, он способен даже осуществлять измерения кода, который можно использовать для любой традиционной навигации при помощи GPS или спутников, в том числе, в частности, для обычного определения местоположения, разностного определения местоположения и определения времени GPS. Кроме того, специалистам в данной области техники должно быть ясно, что с этой системой обеспечения помехозащищенности применимы или совместимы различные способы, используемые для улучшения кодовых характеристик, таких как пространственное разнесение коррелятора при помощи переменных элементов дискретизации или множества элементов дискретизации.
На Фиг.13 показан примерный способ дальнейшего накопления отчетов GPS длительностью 20 мс в более длительные периоды интегрирования. Как показано на чертеже, устройство 1302 упорядочивания битов данных GPS согласовывает априорно известные биты данных с поступающими измерениями синфазной и квадратурной составляющих для отделения модуляции данных. Для других глобальных спутниковых систем навигации (GNSS), таких как будущие варианты GPS, любая форма символьной модуляции может быть удалена аналогичным образом. Затем квазистатические измерения усредняются по додетекторному интервалу (посредством блоков 1304 и 1306). В предпочтительном варианте выполнения додетекторный интервал (PDI) является продолжительным, например 5, 10 или 20 секунд, что соответствует более длительному времени согласованного интегрирования, которое является функцией уровня преднамеренных помех.
Полное дополнение выходных измерений для каналов слежения LEO и GPS служит основой для обновления состояния системы. Если в промежутке между полными обновлениями имеется доступ более чем к одному измерению LEO, возможно обновлять подпространство состояний местоположения с частотой обновления LEO и включать их в общее навигационное решение. Если доступен только один спутник LEO, обновляется только эталон времени пользователя.
Инерциальный процессор (112 на Фиг.1) принимает в качестве входных данных необработанные инерциальные данные 111, вводит поправку на предварительно откалиброванные погрешности, включая угловые погрешности, применяет оценки состояния систематической погрешности и выполняет бесплатформенные и навигационные алгоритмы для вычисления широкополосного местоположения и ориентации 113 пользователя. Выходные данные инерциального препроцессора 112 представляют собой как выходные данные о широкополосном местоположении и ориентации, так и вспомогательные данные для обработки сигналов.
Другим аспектом изобретения является центральный регулятор, приведенный на Фиг.14. В целом регулятор 1400 включает в себя калмановский фильтр 108, который связан с функциональными блоками 1405, 1403 и 1404 и который взаимодействует с различными описанными выше сигналами, как показано на чертеже. Для обеспечения заявленной помехозащищенности приемнику требуется чрезвычайно точная модель системы, во многих случаях обеспечивающая точность на субсантиметровом уровне на большом динамическом диапазоне. Такой допуск, выраженный как с точки зрения точности, так и своевременности, особенно важен для эфемерид, измерений опорной фазы и инерциальных выходных данных. Полная модель системы (вложенные позиции 410, 412 и 1414) находится в рамках обобщенного калмановского фильтра 108, который, как показано на чертеже, вырабатывает таким образом упреждающий сигнал 1402 фазы несущей для всех корреляторов в приемнике.
Одно из основных условий надлежащего функционирования системы обеспечения помехозащищенности заключается в удержании оценок систематических погрешностей в пределах допуска. Фильтр получает результаты измерения от всех корреляторов и комбинирует навигационное решение с инерциальным решением для определения инерциальных остаточных систематических погрешностей. Во время полного обновления системы, когда становятся доступными выходные данные коррелятора GPS, обновляется состояние обобщенного калмановского фильтра в целом, и к инерциальным выходным данным применяются новые систематические погрешности.
В последующих разделах описаны различные аспекты высокоэффективной модели системы, которая требуется для обеспечения допусков, необходимых для помехозащищенной работы.
Алгоритм оценки предпочтительного варианта выполнения выполнен с возможностью непосредственной оценки погрешности определения местоположения, времени по эталону пользователя и всех систематических погрешностей по дальности. Этот подход используется на следующем этапе, после упреждающей передачи точной фазы несущей по мере ее приема каждым коррелятором. Исходя из общей одинарной разностной формы, можно построить следующую модель наблюдений для измерения, выполненного одним спутником, GPS или LEO:


где положение пользователя x линеаризовано относительно номинального положения антенны х0, предоставленного инерциальной навигационной системой, где члены, относящиеся к атмосферным погрешностям, считаются связанными с нисходящей линией связи от спутника к пользователю и где b - это общая совокупная систематическая погрешность, которая включает в себя все несмоделированные эффекты, в том числе неопределенности цикла и погрешности электроники. Вводятся следующие определения:
x(t)=x0(t)+δx

Δτ≡τпольз-τопор
К необработанной одинарной разности применяются также поправки на атмосферные погрешности, полученные либо из модели или непосредственными измерениями. Предполагается, что τопор и атмосферные погрешности на линии связи опорной станции точно известны наземным опорным станциям в результате применения известных сетевых методов. См., например, публикацию W.I.Bertiger, Y.E.Bar-Sever, В.J.Haines, В.A.Iijima, S.M.Lichten, U.J.Lindqwister, A.J.Mannucci, R.J.Muellerschoen, Т.N.Munson, A.W.Moore, L.J.Romans, B.D.Wilson, S.C.Wu, T.P.Yunck, G.Piesinger, and М.L.Whitehead, "A Prototype Real-Time Wide Area Differential GPS System", Navigation: Journal of the Institute of Navigation, Vol.44, No. 4, 1998, pp.433-447. Измерения, выполняемые пользователем, затем собираются для получения линейного набора следующих наблюдений:
где 
и



В этом представлении матрица геометрии спутника теперь имеет обобщенный вид для любого спутника GPS или LEO, вектор систематической погрешности β соответствует систематическим погрешностям спутников для каждого спутника GPS или LEO, а временная погрешность Δτ соответствует одинарной разностной погрешности эталона времени (τпольз-τопор).
В соответствии с одним аспектом настоящего изобретения спутники GPS и LEO разделены в представлении пространства состояний. С одной стороны, спутники GPS должны считаться взаимозаменяемыми со спутниками LEO в той степени, что они совместно улучшают геометрию, когда преобладают условия окклюзии. Кроме того, структура должна также допускать отдельную и более высокую частоту обновления для параметров состояния высокомощных спутников LEO, которые обычно находятся в диапазоне от одного до трех в пределах видимости. Для максимального повышения эффективности в условиях преднамеренных помех система и способ должны действительно проявлять оптимальные свойства.
Прежде чем можно будет использовать это представление, следует заметить, что синфазный режим состояний систематических погрешностей неотличим от систематической погрешности эталона времени для наблюдаемых величин одинарной разностной фазы несущих. Метод перебора для определения параметров состояния будет включать в себя выбор определенного спутника в качестве "ведущего" спутника и вычитания геометрии и систематической погрешности эталона времени из всех других, как первоначально показано выше. К сожалению, этот подход создает нежелательные неравноценные выходные данные, которые взвешивают спутники и измерения невзаимозаменяемым образом. Определение местоположения зависит от того, какой спутник выбран в качестве ведущего. Метод прямого не подходит для реализации не только в условиях меняющейся геометрии и случая, когда могут быть доступны два или более спутника LEO, это решение неоптимально и плохо подходит для создания системы, способной обеспечивать весь спектр требуемых характеристик, начиная с условий сильных преднамеренных помех и заканчивая окклюдированными средами. В последнем случае набор отслеживаемых спутников постоянно меняется, что не позволяет назначить ведущий спутник.
Чтобы избежать численных трудностей, желательно создать новый четко определенный набор режимов систематических погрешностей в виде переменных состояния. Новый набор состояний систематических погрешностей и эталонов времени задается с целью (i) поглощения ненаблюдаемого режима и (ii) отображения набора ортонормированных состояний систематических погрешностей, которые также являются ортогональными синфазному режиму.
Во-первых, определяется нормированный базисный вектор синфазного режима:

где n - число доступных измерений дальности. Вклад систематической погрешности в синфазном режиме определяется заданием проекции  . Затем необходимо указать способ находить ортонормированный базис
. Затем необходимо указать способ находить ортонормированный базис  , чтобы охватить пространство, ортогональное к
, чтобы охватить пространство, ортогональное к  , то есть
, то есть  и
и

Нижеприведенные расчеты позволяют получить единственную порождающую функцию для  .
.
Ортогональное пространство можно получить посредством вычитания вклада синфазной моды из вектора систематической погрешности β:

Базис  можно найти, используя разложение на множители QR, где Q - ортонормированная матрица, a R - верхняя треугольная матрица например, Gene H. Golub and Charles F. Van Loan, Matrix Computations, Third Edition, Johns Hopkins University Press, Baltimore, 2003, p.223.), так что:
можно найти, используя разложение на множители QR, где Q - ортонормированная матрица, a R - верхняя треугольная матрица например, Gene H. Golub and Charles F. Van Loan, Matrix Computations, Third Edition, Johns Hopkins University Press, Baltimore, 2003, p.223.), так что:

В этом случае ранг матрицы А равен n-1 и тогда ортонормированный базис задается первыми n-1 столбцами матрицы Q:

Хотя существует множество неединственных решений для , в предпочтительном варианте выполнения матрица является треугольной, чтобы можно было разделить состояния LEO и GPS, которые работают с различными частотами обновления. На основе определения матрицы А можно показать, что метод QR действительно позволяет получить матрицу , которая является нижней треугольной матрицей, если заметить, что

Поскольку А является симметричной положительной полуопределенной матрицей и поскольку благодаря симметрии разложения Холецкого LLT=ATA=А первые n-1 столбцов матрицы Q представляют собой нижнюю треугольную матрицу. Мы называем эту структуру "сбалансированным" базисом для всех режимов системы слежения для всех спутников в пределах видимости, согласующимся с отдельной оценкой состояния для эталона времени пользователя,
Желательны следующие характеристики слежения: (i) выделение эталона времени пользователя в качестве независимой оценки состояния, (ii) установление структуры обработки измерений "всех в пределах видимости", которая обрабатывает каждый космический аппарат сбалансированным образом без приоритета, то есть решение не зависит от смены или вращения космических аппаратов и связанных с ними измерений в рамках структуры, (iii) обеспечение работы в условиях окклюзий, позволяя обрабатывать спутники GPS и LEO без приоритета и взаимозаменяемым образом, (iv) поддержание оптимального решения, несмотря на частое переключение антенн спутников и космических аппаратов из-за перемещения и вращения космических аппаратов, (v) допущение многоскоростного разделения быстрых измерений LEO и медленных измерений GPS и (vi) обеспечение численной определенности параметров состояния, чтобы они были совместимы с устойчивым выполнением в виде обобщенного калмановского фильтра.
Ниже приведен пример разделения состояний систематических ошибок для 5 спутников GPS, находящихся в пределах видимости, и 1 спутника LEO, находящегося в пределах видимости:
где  обозначает вектор ортонормированных режимов систематических погрешностей, имеющих n-1 строк, согласующихся с размерностями .
обозначает вектор ортонормированных режимов систематических погрешностей, имеющих n-1 строк, согласующихся с размерностями .
Достоинства ортонормированной нижней треугольной структуры становятся более понятными, когда в пределах видимости находится множество спутников LEO. Обновление состояний спутников LEO должно осуществляться за более короткий временной интервал, чем для спутников GPS, но при этом необходимо обрабатывать каждое измерение неприоритетным, равновзвешенным образом по отношению ко всем остальным измерениям спутников, как GPS, так и LEO. Нижеприведенный пример показывает явную порождающую функцию для матрицы Q для любого суммарного числа (GPS+LEO) отслеживаемых спутников n. Пример также показывает разделение для случая, когда в пределах видимости находится 3 спутника LEO:
Эта структура треугольной V-ортонормированной матрицы позволяет более часто осуществлять обновления системы слежения за LEO, не допуская смешения параметров состояния слежения за LEO с параметрами состояния слежения за GPS. Нули в верхней центральной части матрицы предпочтительного варианта выполнения обеспечивают независимость относительных режимов слежения за GPS от состояний слежения за LEO. Нижние левые элементы блочной матрицы относятся всецело к синфазному режиму относительно спутников LEO. Поэтому в промежуточный интервал продленного перерыва GPS, когда системы слежения за LEO быстро обновляются, состояния слежения за GPS представляются в качестве пассивных, синфазных вкладов в новую систему слежения за LEO уменьшенного порядка:

Если вернуться к системе полного порядка, то систематические ошибки конкретных спутников можно заменить новыми определениями режима систематических ошибок:

Масштабируя β|| в соответствии с  и объединяя состояния синфазной систематической ошибки и эталона времени в новое состояние эталона времени
и объединяя состояния синфазной систематической ошибки и эталона времени в новое состояние эталона времени  , можно получить результирующее уравнение результатов наблюдения:
, можно получить результирующее уравнение результатов наблюдения:

Плечо рычага для ориентации
На практике инерциальная навигационная система расположена не в том же месте, что и антенна GPS на космическом аппарате. Плечо рычага d от инерциального прибора до антенны GPS задает векторное смещение между погрешностью ИНС r и смещением антенны GPS δx в виде функции матрицы ориентации А размером (3×3):
δx=r+ATd
Можно линеаризовать эту формулу относительно номинальной ориентации А0 для вектора малого возмущения ориентации ψ:
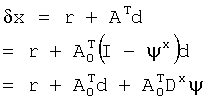
где обозначение с крестом
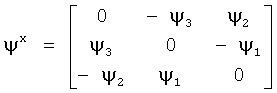 где
где 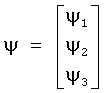
означает векторное произведение (или умножение слева на кососимметричную матрицу вектора).
Уравнение результатов наблюдения принимает вид:


Модель инерциальной навигационной системы
Характеристики инерциальной системы можно оценить посредством анализа лианеризованного представления векторных уравнений движения для погрешностей ИНС (см., например, I.Y.Bar-Itzhack and N.Berman, "Control Theoretic Approach to Inertial Navigation Systems," AIAA Paper 87-2591, 1987):



где базисный декартов вектор r является погрешностью определения местоположения ИНС, v - погрешность определения скорости, ρ - угловая скорость системы отсчета пользователя относительно системы координат север-восток - вниз, Ω - угловая скорость вращения Земли, ω=Ω+ρ, ∇ - погрешность акселерометра, ψ - погрешность определения ориентации, f - удельная сила, Δg -погрешность значения ускорения свободного падения и ε - погрешность угловой скорости вращения гироскопа.
Эта система уравнений имеет представление в пространстве состояний в виде системы линейных уравнений 9×9:

где x - вектор состояния, a w - вектор погрешности из-за случайных шумов. Для инерциального процессора управляющая переменная u соответствует предварительно обработанным результатам измерений акселерометра и скоростного гироскопа, жестко связанным с космическим аппаратом. На практике для уравнения ошибок эти управляющие входные сигналы в точности уничтожают друг друга и поэтому считаются в точности равными нулю. Мы добавляем 6 дополнительных состояний для систематических ошибок гироскопа и акселерометра в трех пространственных измерениях, чтобы показать, каким образом эти ключевые параметры можно оценить в реальном времени в рамках изобретения.
Затем динамика инерционной системы линеаризуется и представляется в пространстве состояний в виде следующей 15×15 системы уравнений:
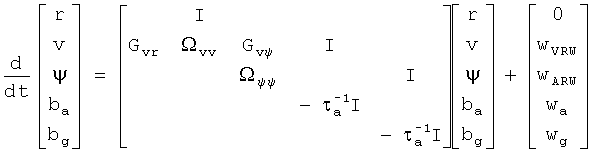
где
где g - это локальное ускорение, вызванное силой тяготения, R - радиус Земли, а ΩN и ΩD - компоненты вектора вращения Земли в проекции соответственно на направления "Север" и "Вниз".
Модель коррелятора
С учетом быстрого обновления эталонов времени со спутников LEO, которое происходит за додетекторный интервал GPS, и с целью точного моделирования эффектов инерциального шума за время продленного интервала предпочтительно также составить модель коррелятора приемника. Эта комплексная модель также будет использоваться для использования генератора приемника с числовым управлением в качестве встроенной переменной состояния. Наша цель заключается в согласовании со стандартными уравнениями обновления измерений:
yk=Hxk+vk

так чтобы наблюдаемая величина Δyk являлась выходной величиной коррелятора, проинтегрированной по додетекторному интервалу.
В соответствии с моделью коррелятор представляет собой коррелятор, согласованно интегрирующий по времени Т синфазную и квадратурную компоненту входного сигнала, амплитуда которого равна  , фаза φ(t), a синфазный и квадратурный шум n(t). В предположении, что погрешности слежения остаются малы в течение додетекторного интервала, модель коррелятора сводится к простому интегралу фазовых ошибок в соответствии с эквивалентным угловым шумом ν:
, фаза φ(t), a синфазный и квадратурный шум n(t). В предположении, что погрешности слежения остаются малы в течение додетекторного интервала, модель коррелятора сводится к простому интегралу фазовых ошибок в соответствии с эквивалентным угловым шумом ν:


Временно определяется новая непрерывно наблюдаемая  которая может рассматриваться в качестве отдельной переменной состояния для окончательного построения дискретной оцениваемой наблюдаемой
которая может рассматриваться в качестве отдельной переменной состояния для окончательного построения дискретной оцениваемой наблюдаемой  . Масштабный коэффициент 1/Т в определении непрерывной наблюдаемый служит в качестве заполнителя и напоминания о том, что когда непрерывная система преобразуется в дискретную форму, то выходные данные коррелятора представляют собой интеграл по интервалу Т. Мгновенная априорная фаза для упреждающей подачи в данный канал определяется выражением:
. Масштабный коэффициент 1/Т в определении непрерывной наблюдаемый служит в качестве заполнителя и напоминания о том, что когда непрерывная система преобразуется в дискретную форму, то выходные данные коррелятора представляют собой интеграл по интервалу Т. Мгновенная априорная фаза для упреждающей подачи в данный канал определяется выражением:
Поскольку переменные состояния теперь считаются состояниями оператора оценки, были использованы обозначения с чертой сверху. Полная модель коррелятора формируется посредством накопления упреждающей принятой фазы сигнала для каждого спутника:

Один аспект настоящего изобретения включает в себя надлежащее моделирование коррелятора. Хотя инерциальный прибор системы слежения за GPS/LEO и эталоны времени приемника обычно работают независимо, эти подсистемы взаимосвязаны в корреляторе исключительно жестким допуском сантиметрового уровня. Коррелятор обеспечивает первичный механизм обратной связи по состоянию. Поскольку каждая подсистема может работать с разной частотой обновления, в модели коррелятора предпочтительно учитывается каждый входной сигнал, чтобы в полной мере использовать преимущества точной обратной связи по состоянию.
Комплексная система
Теперь возможно объединить уравнения для коррелятора для всего в пределах видимости, инерциального устройства, систематических погрешностей слежения и состояния эталона времени в единую комплексную систему:
Непрерывная система  преобразуется в дискретный вид при помощи известного метода пространства состояний. См., например, Gene F. Franklin, J. David Powell, Michael L. Workman, Digital Control of Dynamic Systems, Second Edition, Addison-Wesley, New York, 1990:
преобразуется в дискретный вид при помощи известного метода пространства состояний. См., например, Gene F. Franklin, J. David Powell, Michael L. Workman, Digital Control of Dynamic Systems, Second Edition, Addison-Wesley, New York, 1990:
xk+1=Фxk+wk
Ф=eFT
Дискретная система затем дополняется дискретным состоянием  , представляющим значение непрерывного вектора состояния
, представляющим значение непрерывного вектора состояния  в конце предыдущего временного шага (k-1). Состояние
в конце предыдущего временного шага (k-1). Состояние  представляет непрерывную величину в конце текущего временного шага (k). Такой прием завершает модель интегрирующих корреляторов со сбросом, так чтобы в данном варианте выполнения выдавалось только точное интегральное значение за один временной шаг Т, согласующееся с приведенным выше первоначальным определением коррелятора. Уравнение перехода дискретных состояний затем разбивается вновь:
представляет непрерывную величину в конце текущего временного шага (k). Такой прием завершает модель интегрирующих корреляторов со сбросом, так чтобы в данном варианте выполнения выдавалось только точное интегральное значение за один временной шаг Т, согласующееся с приведенным выше первоначальным определением коррелятора. Уравнение перехода дискретных состояний затем разбивается вновь:
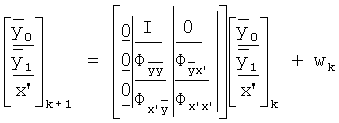
где
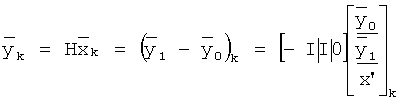
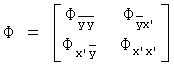
где переменная x' определена в качестве вектора первоначального состояния дискретной системы без учета текущих состояний коррелятора  и
и  , в явном виде приведенных выше.
, в явном виде приведенных выше.
Действительное выходное значение коррелятора моделируется посредством соединения интегрированной фазы для каждого отслеживаемого спутника:
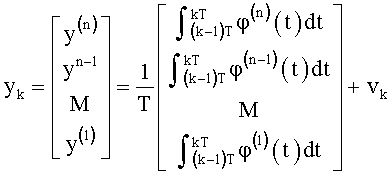
Из-за проведенной ранее аппроксимации это представление само по себе не является правильным, если и до тех пор пока оно не сочетается с упреждающей компонентой выходного значения коррелятора. Полное законченное выходное значение коррелятора имеет вид:

Используя эту дискретную модель, можно теперь применить калмановский фильтр. Вышеприведенное представление приведено в линеаризированном виде относительно определенного положения и ориентации. Поскольку на практике инерциальные уравнения и уравнения для определения дальности являются нелинейными, необходимо, чтобы в качестве действительной реализации применялся обобщенный калмановский фильтр (108 на Фиг.1). Определение точных смещений при помощи этой дискретной модели позволяет уловить медленный уход компонент на протяжении PDI и обеспечивает точность модели ошибок. В зависимости от преднамеренных помех, окружающих каждый спутник, диагонали измеренных значений фазы несущей GPS Rv лежат в установившемся состоянии в окрестности примерно (0,5 см)2. Возрастание ошибки можно определить посредством интегрирования спектральной плотности мощности Rwpsd белого шума процесса, действующего в системе:


где Р - ковариационная матрица апостериорных состояний, а М - ковариационная матрица априорных состояний. В процессе работы в предпочтительном варианте выполнения используется полный обобщенный калмановский фильтр для динамического регулирования начальных условий, определенных нелинейных геометрических параметров и изменяющихся во времени отношений помеха - сигнал. Обновление измерений определяется формулой:

Pk=Mk-MkHT(HMkHT+Rv)-1HMk
Для целей анализа целесообразно использовать оптимальный алгоритм оценки и выбрать наблюдательные коэффициенты усиления таким образом, чтобы Р стала послеизмерительной ковариантностью в установившемся состоянии, а М - доизмерительной ковариантностью в установившемся состоянии. Оптимальный коэффициент усиления в установившемся состоянии L можно вычислить, решив известное алгебраическое уравнение Риккатти. Собственные значения λ полной замкнутой системы можно затем вычислить так, чтобы
(Ф-ФLH)x=λx
До сих пор рассматривались основные принципы работы помехозащищенной системы. Однако мы реализовали предпочтительный вариант осуществления, чтобы сделать систему пригодной для практического использования в чрезвычайно жестких ситуациях. В предпочтительном варианте выполнения применяются одинарные, а не двойные разности для слежения за каждым источником определения дальности. Эта более общая форма лучше справляется с динамическими средами при минимальном количестве ресурсов слежения за каналами в ситуации, когда осуществляется слежение за множеством спутников LEO и спутники то входят в пределы видимости, то выходят из пределов видимости.
Если имеется требуемая геометрия, в особенности являющаяся следствием большого углового перемещения спутника LEO, этот приемник также определяет смещения состояний для получения точной трехмерной фиксации положения с использованием только фазы несущей от спутников GPS и LEO. Эта способность распространяется не только на условия преднамеренных помех, но и на условия нормального сигнала, когда динамика платформы пользователя является слишком трудной для того, чтобы обычный приемник GPS мог осуществлять слежение. Систематическим погрешностям состояний слежения придается постоянная времени, равная примерно одной, двум минутам.
Обобщенный калмановский фильтр подразделяется на четыре компоненты: форма непрерывного временного обновления, которая выдает упреждающую фазу несущей на все корреляторы приемника и три многоскоростных обновления времени/измерений. Три многоскоростных интервала соответствуют масштабам шума процесса и измерений для инерциальной навигационной системы, спутников LEO и GPS. Эти интервалы настраиваются для конкретных динамических и помеховых состояний.
На Фиг.15 приведена блок-схема последовательности операций для обобщенного калмановского фильтра 108. В блоке 1502 вырабатываются упреждающая фаза и упреждающие биты данных GPS. Используется вариант непрерывной системы пониженного порядка для выработки упреждающей фазы несущей:

На блок-схеме также приведены последующие обновления ИНС, LEO и GPS (1510, 1512 и 1514).В целом наименьший интервал - это TINS, который достаточно мал, чтобы уловить динамику пользовательской платформы (1508). Следующий интервал по величине - это TLEO (1506), который обычно устанавливается соответствующим скорости передачи данных с LEO. Самый большой интервал - это TGPS (1504), который устанавливается динамически на основе определенного мгновенного значения отношения помеха - сигнал. Хотя точное значение должно определяться оптимальным образом при помощи фильтра Калмана с учетом конкретной реализации, значение TGPS находится в окрестности величины:
TGPS=10(J/S-70 дБ)/10 дБ сек
Результирующий цикл роста ошибки приведен на Фиг.16 для случая, когда TGPS равен 20 секундам. При каждом полном обновлении системы апостериорное знание местоположения сокращается в соответствии с новой информацией, доступной от выходных измерений коррелятора. В промежутке рабочий шум системы, в котором доминирует случайное угловое блуждание гироскопа, вызывает рост неопределенности, связанный с погрешностью. Калмановские коэффициенты усиления и интервалы обработки выбираются таким образом, чтобы инерциальная погрешность находилась в пределах малой доли от длины волны.
Основной запуск системы может осуществляться простым образом, напоминающим работу традиционного приемника GPS. Для поиска спутниковых сигналов пробегается все двухмерное поисковое пространство комбинаций кода и доплеровского смещения. Приемник может захватить спутники в условиях отсутствия помех и продолжить работу, когда возникают помехи. Приемник может также захватить спутники в условиях помех, при этом первоначальный поиск будет длиться пропорционально дольше, чем при отсутствии помех.
Помехозащищенная система не ограничена работой с инерциальными системами. Она также может иметь низкодинамическую или статическую реализацию. Полная система для низкодинамического случая имеет следующий вид:
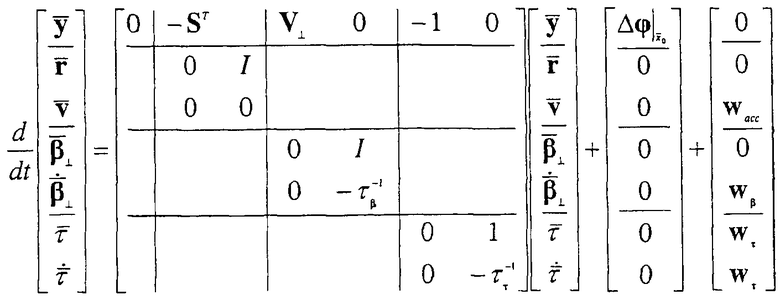
Статический случай реализуется посредством удаления состояния, относящегося к скорости.
Достоверность навигационного выходного сигнала часто имеет первостепенное значение. Описанные здесь система и способ навигации полностью совместимы с обеспечением максимально возможных порогов достоверности. При приведении обобщенного калмановского фильтра 108 в установившееся состояние даже в условиях помех имеется большое количество избыточной информации, доступной в виде остаточных погрешностей измерений, для определения аномальных условий. Подход к обеспечению достоверности использует известный автономный контроль достоверности в приемнике (RAIM). Предполагается, что большинство переменных состояния сводится к сантиметровой точности и что обновления инерциальных состояний систематических погрешностей - особенно погрешностей определения местоположения - происходят с сантиметровой точностью. Поэтому возможно построить остаточное значение RAIM:

которое образует распределение хи-квадрат, имеющее эффективно n-4 степени свободы. При наличии достаточной избыточности спутников, то есть при n>4 можно применить порог к остаточному значению для проверки гипотезы ошибочности. При наличии еще большей избыточности, то есть при n>5 и границ помехозащищенности более разработанные реализации RAIM позволяют обнаруживать и исключать ошибку.
Как упоминалось выше, могут применяться сети наземных станций слежения и традиционная для GPS передача времени для обеспечения доступа к τref любому данному спутнику LEO 222, который предполагается использовать. Если наземные станции слежения недоступны, можно использовать иные альтернативы. Первая альтернатива - это передвижная наземная опорная станция 1702, изображенная на Фиг.17. Если из кинематической GPS доступно точное относительно положение опорной станции 702, то точный опорный эталон времени τпередвиж, требуемый для использования в качества базовой станции в данном изобретении, может быть получен методом наименьших квадратов из измеренных значений фаз, полученных от неподвижных и передвижных платформ:

Другое средство передачи сетевого времени на расстояния большие, чем зона обслуживания спутника LEO, заключается в использовании межспутниковых линий связи, как показано на Фиг.18. В этом варианте выполнения выполняется двустороннее согласованное определение дальности между двумя соседними космическими аппаратами 1802 и 1804. Поскольку каждый космический аппарат LEO использует при работе согласованный эталон времени, вклад в ошибку, вносимый эталоном времени каждого космического аппарата, полностью сокращается. Следовательно, при точном знании положения каждого космического аппарата можно восстановить опорное время ведущей наземной станции 1802.
Применяя аналогичный подход для предпочтительного варианта выполнения с использованием нахождения в пределах общей видимости, можно получить:

Эталоны времени космических аппаратов взаимно сокращаются. В предпочтительном варианте выполнения применялись двусторонние межспутниковые линии связи для получения результата, при котором вклад шума в  меньше, чем при односторонней связи.
меньше, чем при односторонней связи.
Этот результат может быть распространен для достижения такого же результата, для случая нахождения в пределах общей видимости, а именно:

Хотя в вышеприведенном подробном описании был представлен по меньшей мере один примерный вариант выполнения, следует понимать, что существует большое количество разновидностей. Следует также понимать, что примерный вариант выполнения или примерные варианты выполнения являются лишь примерами и не предназначены для того, чтобы каким бы то ни было образом ограничивать объем, применимость или конфигурацию изобретения. Напротив, вышеприведенное подробное описание дает специалистам в данном области техники удобную путеводную нить для реализации примерного варианта выполнения или примерных вариантов выполнения. Следует понимать, что могут быть внесены различные измерения в функции и взаиморасположение элементов без отступления от объема изобретения, определяемого прилагаемой формулой и ее юридическими эквивалентами.
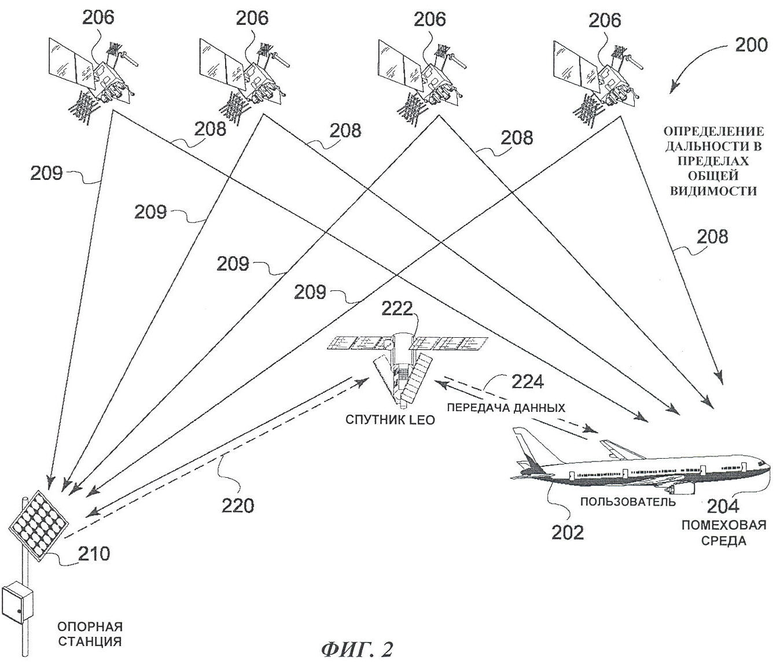
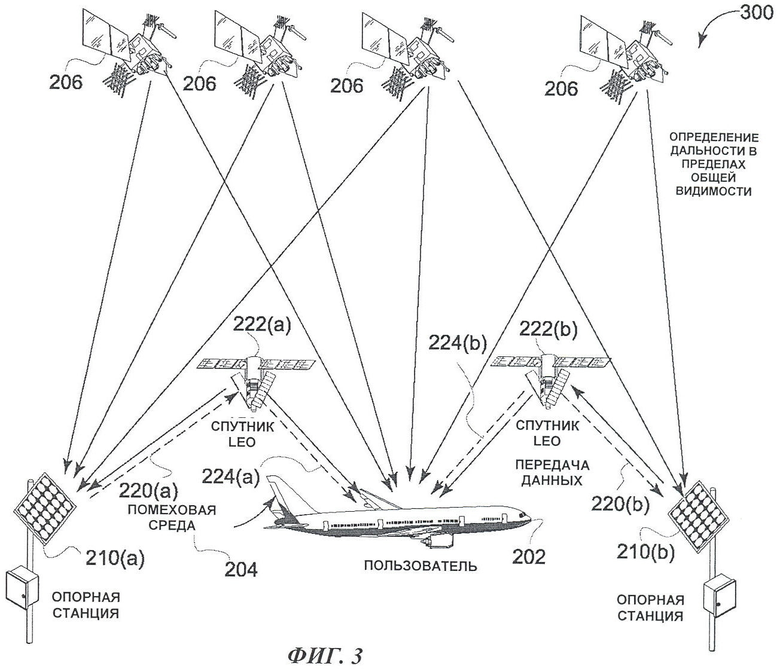
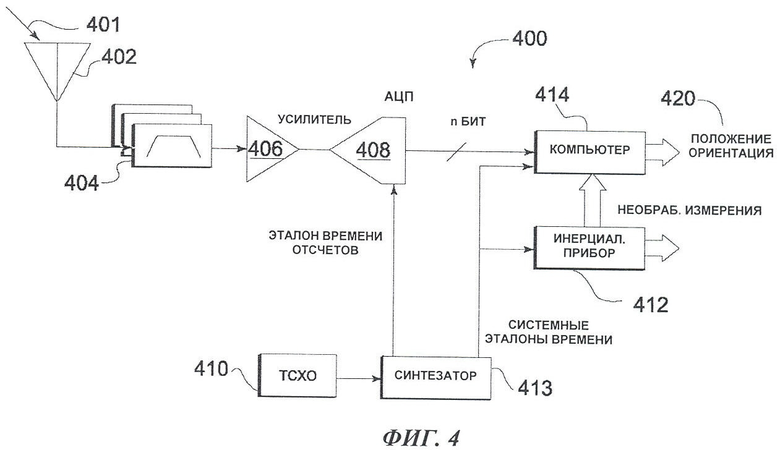
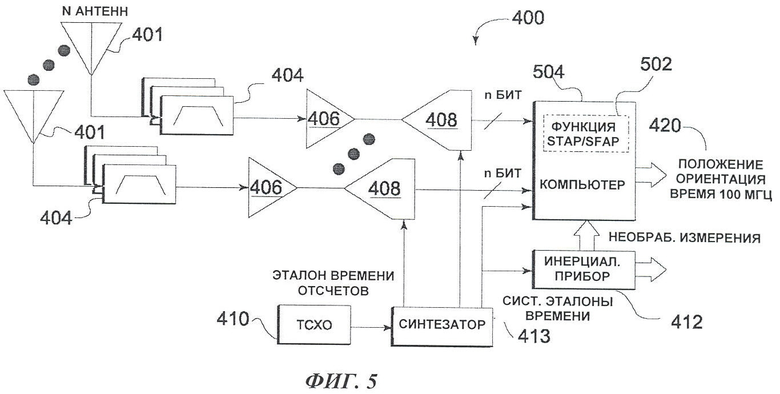
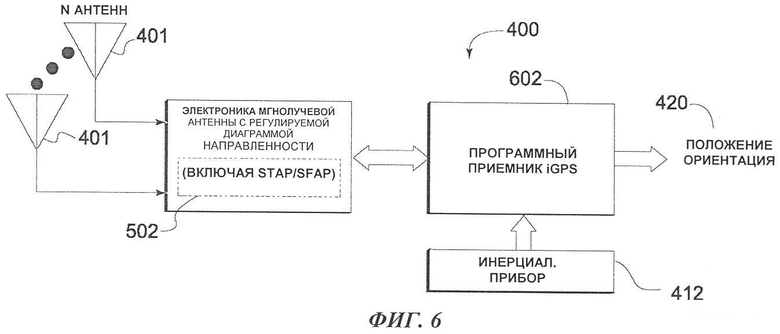
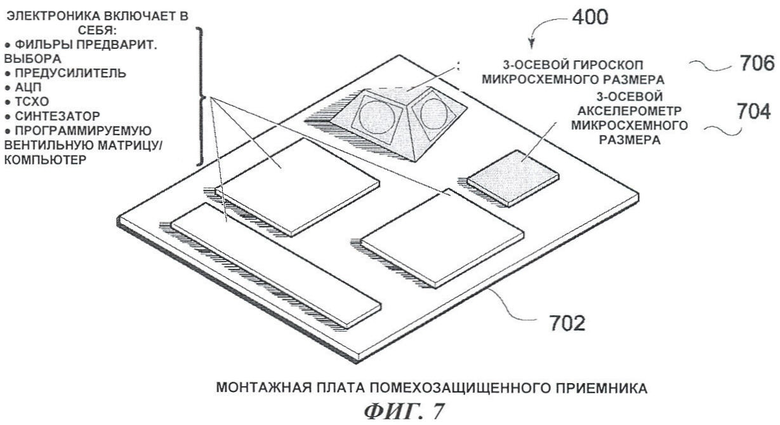
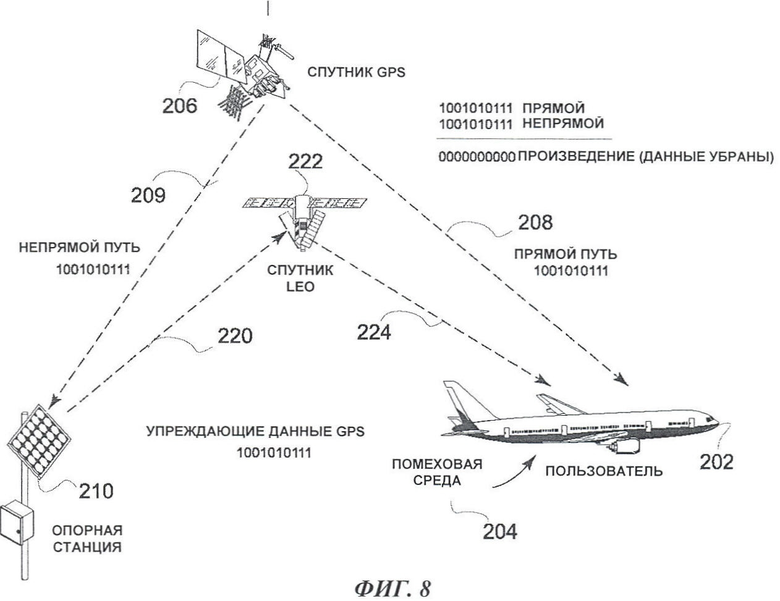
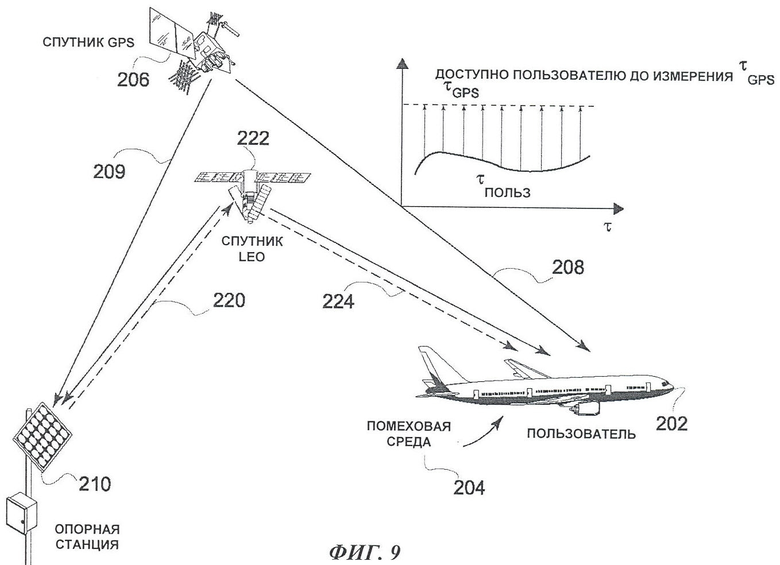
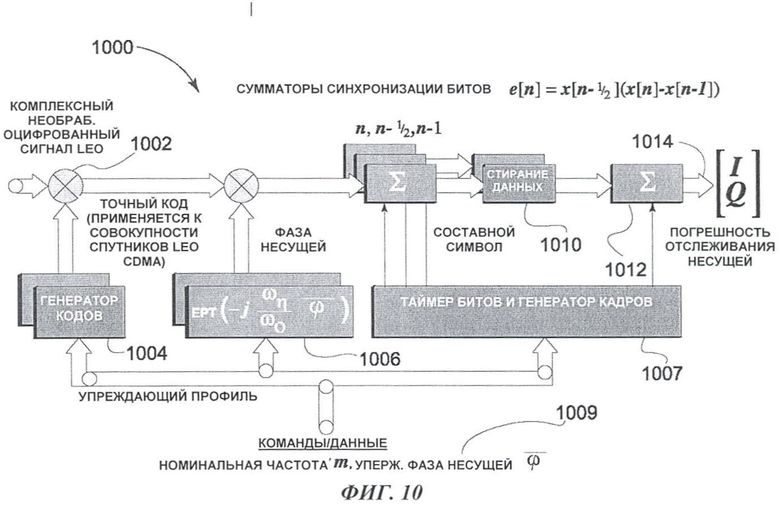
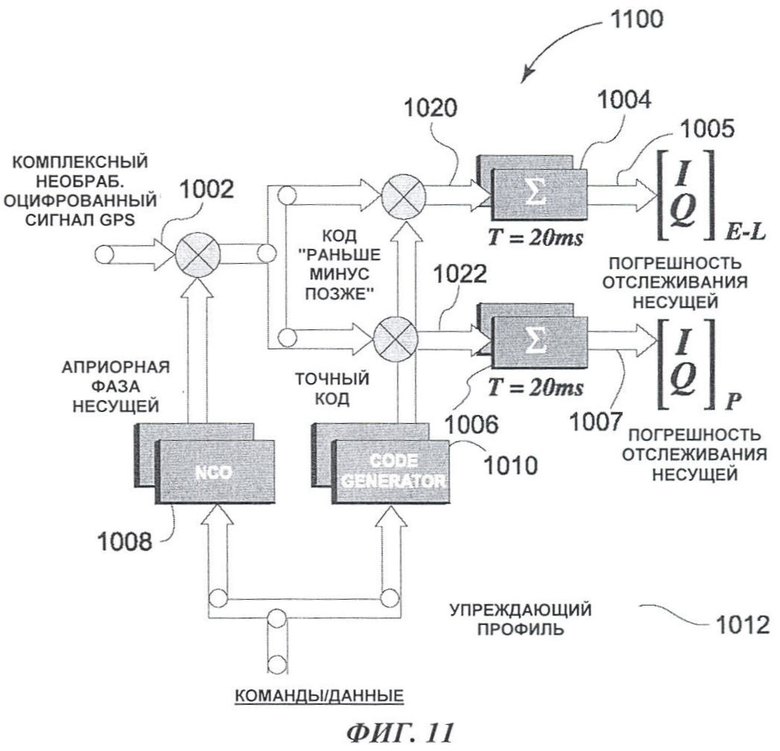
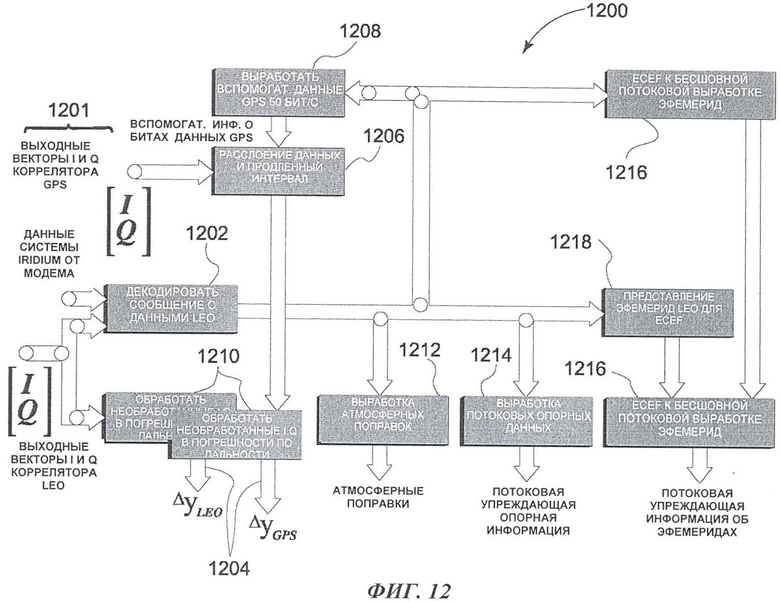
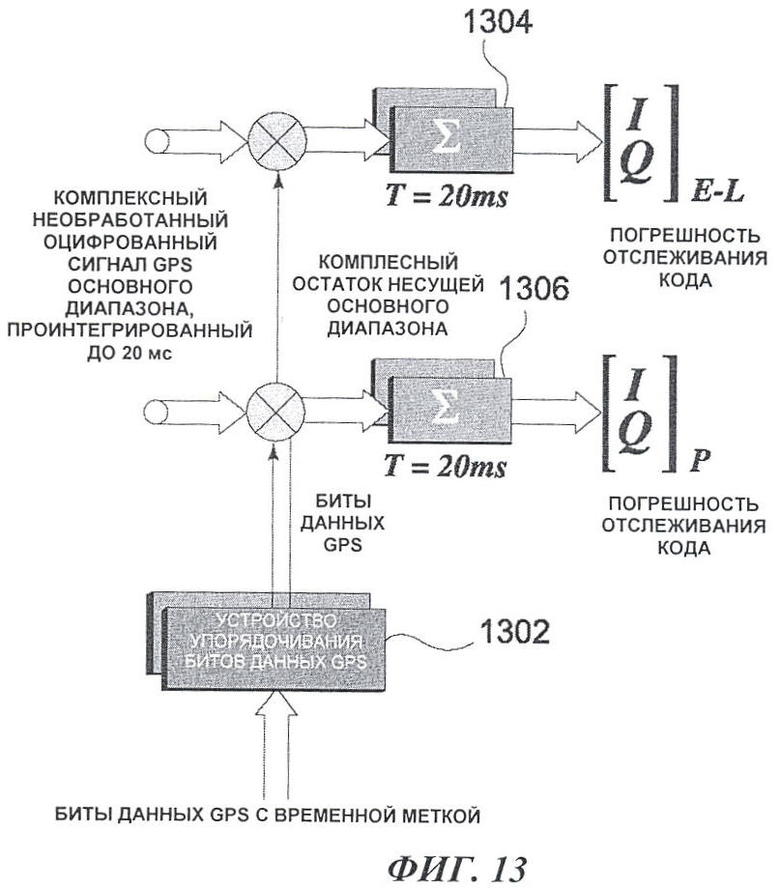
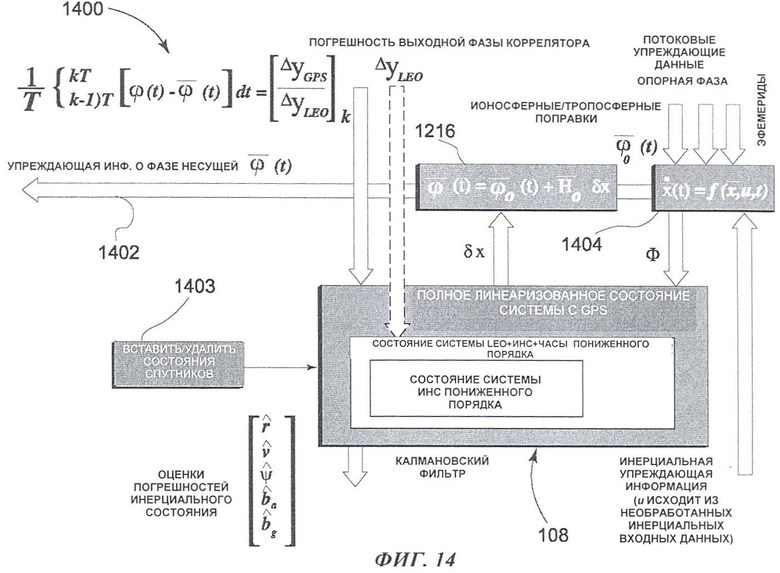
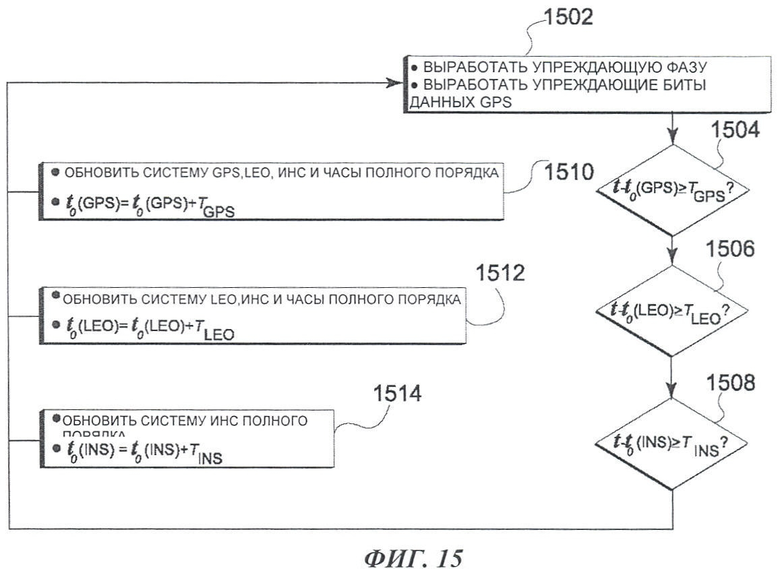
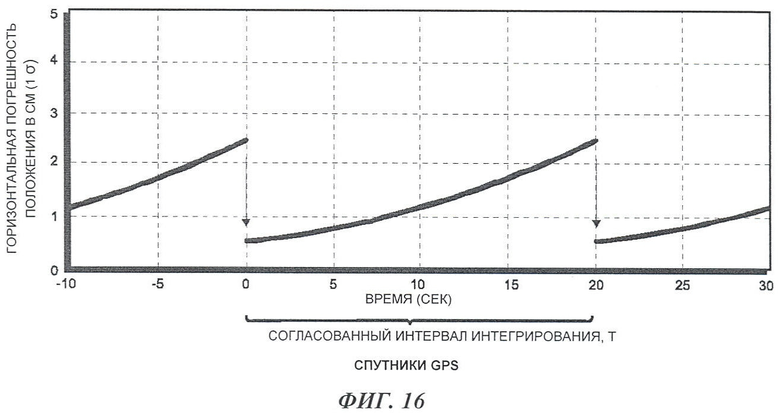
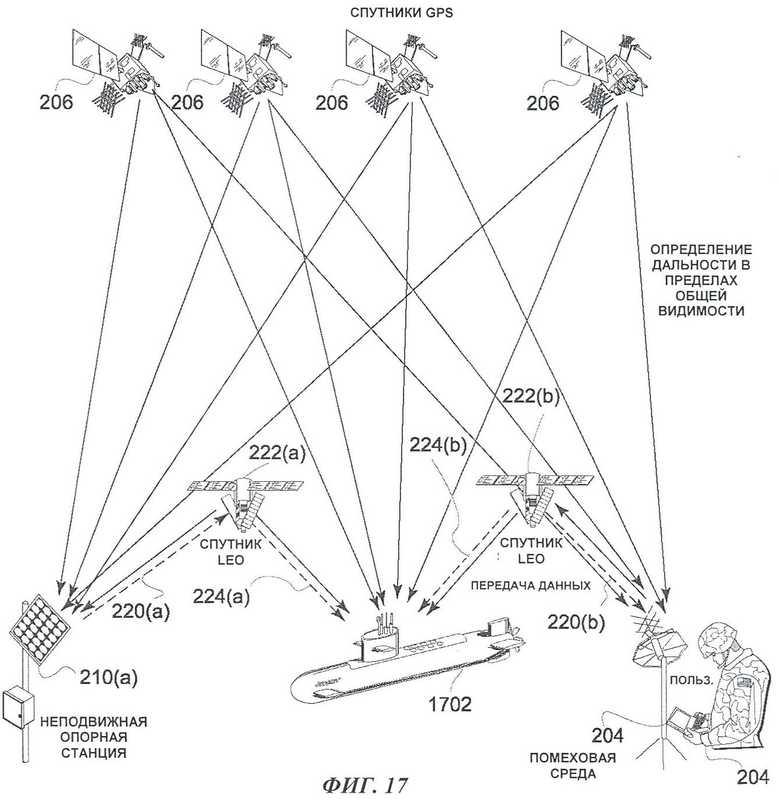
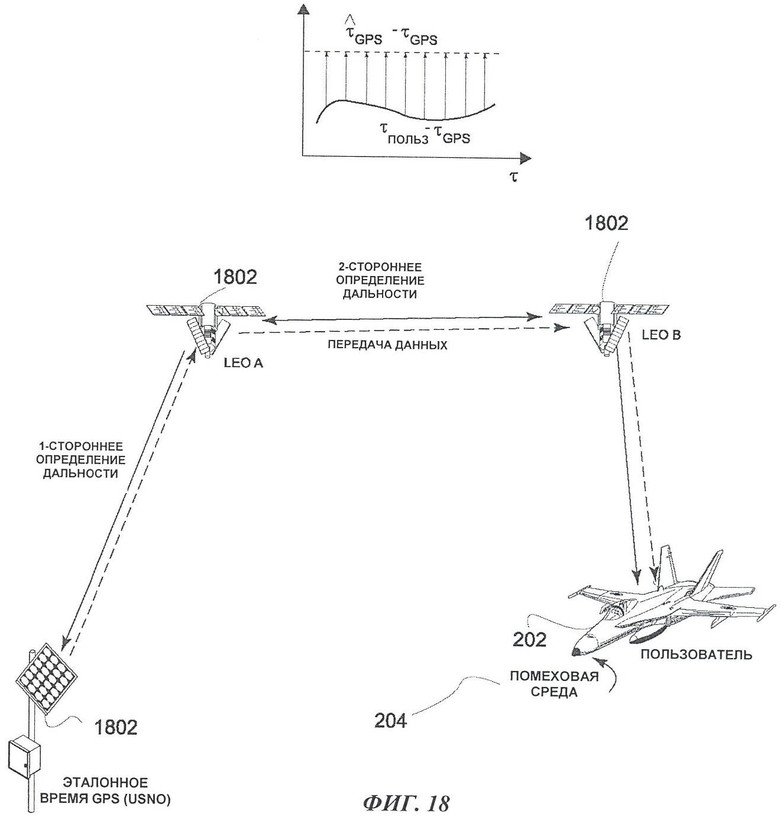
Изобретение относится к навигационным системам. Техническим результатом является повышение помехозащищенности. Результат достигается тем, что навигационная система использует совместно с GPS сеть наземных опорных станций и спутников на низкой околоземной орбите (LEO). Устанавливается дальномерная геометрия в пределах общей видимости спутника GPS, которая связывает опорную станцию и пользователя. Между той же парой из опорной станции и пользователя устанавливается также вторая геометрия в пределах общей видимости спутника LEO. Наземные станции вырабатывают вспомогательные сигналы в режиме реального времени для обеспечения измерений фазы несущей GPS сигналов спутников LEO. Эта вспомогательная информация передается через спутники LEO к приемнику пользователя на высокой мощности для проникновения сквозь окружающие помехи. Пользователь принимает синхронизацию по фазе несущей спутника LEO, демодулирует вспомогательную информацию, затем применяет измерения фазы несущей и вспомогательную информацию для обеспечения продленных согласованных измерений сигналов GPS. Таким образом, система восстанавливает сигналы GPS, которые в противном случае были бы потеряны из-за помех. 15 з.п. ф-лы, 18 ил.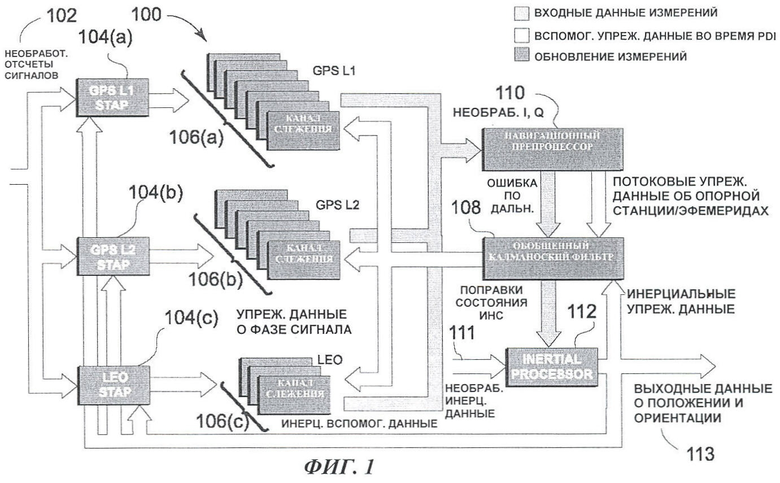
1. Навигационная система (200), содержащая:
опорный приемник (210);
приемник (202) пользователя;
спутник (206) глобальной системы определения местоположения (GPS), находящийся в пределах общей видимости для указанного опорного приемника (210) и указанного приемника (202) пользователя, при этом указанные опорный приемник (210) и указанный приемник (202) пользователя принимают зондирующий сигнал (208, 209) несущей частоты от указанного спутника (206) GPS;
первый спутник (222) на низкой околоземной орбите (LEO), находящийся в пределах общей видимости указанного опорного приемника (210) и указанного приемника (202) пользователя, при этом указанный опорный приемник (210) и указанный приемник (202) пользователя выполнены с возможностью вычисления соответственно первого и второго измерений зондирующего сигнала несущей частоты LEO, полученного от указанного первого спутника (222) LEO;
указанный приемник (202) пользователя выполнен с возможностью приема через спутник (222) LEO указанного первого измерения от указанного опорного приемника (210) и применения указанных первого и второго измерений для построения априорной оценки фазы сигнала указанного зондирующего сигнала (208) несущей частоты GPS, принятого указанным приемником (202) пользователя, при этом указанная априорная оценка используется в качестве основы для продленного интегрирования указанного зондирующего сигнала (208) несущей частоты в указанном приемнике (202) пользователя.
2. Навигационная система (200) по п.1, дополнительно содержащая множество спутников (222) LEO, в которой один или несколько из указанного множества спутников (222) LEO вносят вклад в указанную априорную оценку.
3. Навигационная система (200) по п.1, в которой указанный приемник (202) пользователя использует информацию об эфемеридах для определения указанной априорной оценки, при этом указанная априорная оценка составляет малую долю от длины волны за продленный интервал интегрирования.
4. Навигационная система (200) по п.1, дополнительно включающая в себя множество спутников (206) GPS, в которой множество соответственных зондирующих сигналов (208, 209) несущей частоты от указанных спутников (206) GPS объединяется указанным приемником (202) для получения навигационного решения.
5. Навигационная система (200) по п.2, дополнительно включающая в себя множество спутников (206) GPS, в которой множество соответствующих зондирующих сигналов (208, 209) несущей частоты от указанных спутников (206) GPS объединяется указанным приемником (202) для получения навигационного решения.
6. Навигационная система (200) по п.1, в которой указанное продленное интегрирование используется для восстановления информации о дальности по временному сдвигу кода, внедренной в указанный зондирующий сигнал (208, 209) несущей частоты от указанного спутника (206) GPS.
7. Навигационная система (200) по п.6, в которой информация о дальности по временному сдвигу кода от указанного множества спутников (206) GPS используется для вычисления местоположения и ухода эталона времени указанного приемника (202) пользователя.
8. Навигационная система (200) по п.1, в которой первое и второе измерения предоставляют указанному приемнику (202) пользователя точную оценку относительного времени между указанным опорным приемником (210) и указанным приемником (202) пользователя.
9. Навигационная система (200) по п.7, в которой указанная информация о дальности по временному сдвигу кода предоставляет указанному приемнику (202) пользователя оценку времени, которая одновременно является точной относительно указанного времени опорного приемника и точной относительно времени GPS.
10. Навигационная система (200) по п.5, в которой изменение геометрии указанного множества спутников (222) LEO и спутников (206) GPS используется указанным приемником (202) спутника для оценки систематических погрешностей.
11. Навигационная система (200) по п.5, дополнительно содержащая множество спутников (222) LEO, в которой указанный приемник (202) пользователя использует ортогонализацию для разделения отслеживаемых переменных состояния систематических ошибок, связанных с указанным множеством спутников (206) GPS, указанным множеством спутников (222) LEO и эталоном времени, связанным с указанным приемником (202) пользователя.
12. Навигационная система (200) по п.5, в которой указанный приемник (202) пользователя является неподвижным.
13. Навигационная система (200) по п.7, в которой указанный приемник (202) пользователя работает в условиях низкой динамики.
14. Навигационная система (200) по п.5, в которой в рамках указанного приемника (202) спутника используется инерционная навигационная система для вычитания движения указанного приемника (202) пользователя.
15. Навигационная система (200) по п.14, в которой набор поправок на систематические погрешности, выработанный инерциальной навигационной системой, достаточен для обеспечения точности, более высокой, чем малая доля длины волны на интервале, равном указанному продленному интегрированию.
16. Навигационная система (200) по п.5, в которой указанная опорная станция (210) является передвижной.
| US 5944770 А, 31.08.1999 | |||
| WO 2005081011 A2, 01.09.2005 | |||
| SU 1753833 A1, 15.06.1994 | |||
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2262716C2 |

