Уровень техники
Родственные заявки
Настоящая заявка испрашивает приоритет согласно совместно рассматриваемой предварительной заявке США №60/825,656, озаглавленной "Сокращение диапазонов поиска для спутников в других системах GNSS", поданной 14 сентября 2006 г.; и предварительной заявке США №60/870,075, озаглавленной "Система и/или способ для обнаружения сигналов GNSS", поданной 14 декабря 2006 г.; и предварительной заявке США №11/682,692, озаглавленной "Система и/или способ для обнаружения сигналов GNSS", поданной 6 марта 2007 г. и права по которым переуступлены правообладателю настоящей заявки, и которые включены в данное описание посредством ссылки.
Область техники, к которой относится изобретение
Настоящее изобретение относится к определению местоположения на основе сигналов, принимаемых от геостационарных спутников.
Информация
Спутниковая система позиционирования (SPS) обычно содержит систему движущихся по орбите Земли спутников, дающих возможность объектам определять их местоположение на Земле, основываясь, по меньшей мере, частично, на сигналах, принимаемых от спутников. Такой спутник SPS обычно передает сигнал, маркированный повторяющимся псевдослучайным шумовым (PN) кодом с установленным числом чипов. Например, спутник в группировке Глобальной Навигационной Спутниковой Системы (GNSS), такой как GPS или Galileo, может передавать сигнал, маркированный PN кодом, который является отличимым от PN кодов, передаваемых другими спутниками в группировке.
Для оценки местоположения приемника навигационная система может производить измерения псевдодальности до спутников, находящихся "в поле зрения" приемника, используя хорошо известные методы, основываясь, по меньшей мере, частично, на детектировании PN кодов в сигналах, принимаемых от спутников. Такая псевдодальность до спутников может быть определена, основываясь, по меньшей мере, частично, на фазе кода, детектируемой в принятом сигнале, маркированном PN кодом, связанным со спутником, во время процесса обнаружения принимаемого сигнала в приемнике. Для обнаружения принимаемого сигнала навигационная система обычно выполняет корреляцию принимаемого сигнала с локально генерируемым PN кодом, связанным со спутником. Например, такая навигационная система обычно выполняет корреляцию такого принимаемого сигнала с множественным кодом и/или версиями с временным сдвигом такого локально генерируемого PN кода. Детектирование конкретного времени и/или версии сдвинутого по времени кода, давая результат корреляции с наибольшей мощностью сигнала, может указать фазу кода, связанную с обнаруженным сигналом для использования в измерении псевдодальности, как указано выше.
Для детектирования фазы кода в сигнале, принятом от спутника в GNSS, навигационная система может выполнять корреляцию сигнала, принимаемого от спутника, с множественным кодом и/или со сдвинутыми по времени версиями локально сгенерированной последовательности PN кода, связанной с "гипотезами фазы кода", охватывая весь период периодически повторяющейся последовательности PN кода. В конкретном примере сигнала GPS последовательность PN кода содержит 1,023 чипов (элементарных посылок) и повторяется каждую миллисекунду. Соответственно, для детектирования фазы кода сигнала, принятого от спутника GPS, навигационная система может скоррелировать принимаемый сигнал с 1,023 версиями локально генерированной последовательности PN кода, ассоциированной со спутником GPS, сдвинутыми по фазе на приращения в один чип.
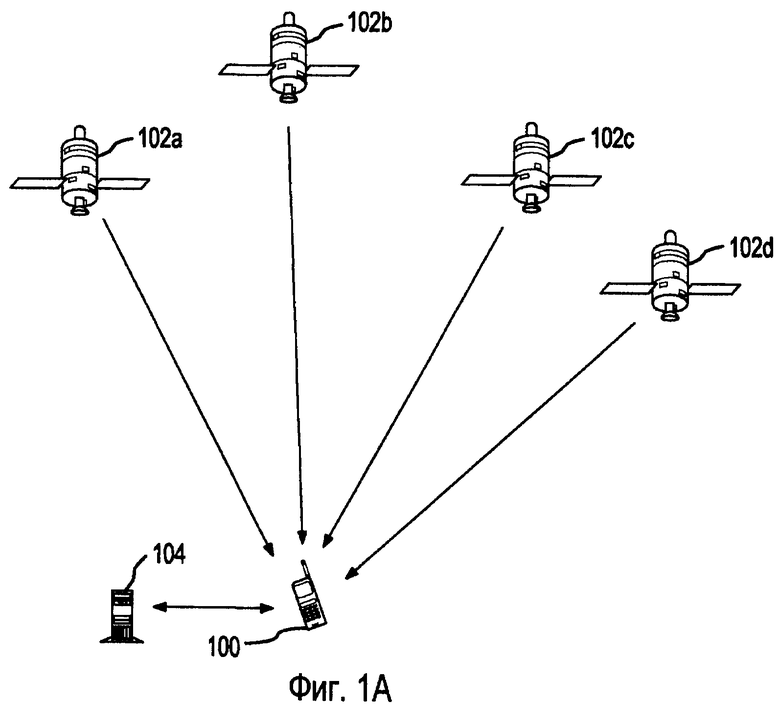
На фиг.1 показано применение SPS системы, в соответствии с которой абонентский терминал 100 в системах беспроводной связи принимает передачи от спутников 102a, 102b, 102c, 102d в зоне видимости абонентского терминала 100 и извлекает временные измерения из четырех или более передач. Абонентский терминал 100 может предоставить такие измерения на объект 104 определения местоположения (PDE), который определяет по этим измерениям местоположение терминала. Альтернативно абонентский терминал 100 может определить свое собственное местоположение из этой информации.
Абонентский терминал 100 может отыскивать передачу от конкретного спутника посредством корреляции PN кода для спутника с принятым сигналом. Принимаемый сигнал обычно содержит набор передач от одного или нескольких спутников в пределах зоны видимости для приемника терминала 100 в присутствии шума. Корреляция может быть выполнена в диапазоне гипотез фазы кода, известных как окно поиска WCP фазы кода, и в рамках гипотез о доплеровской частоте, известных как окно WDOPP доплеровского поиска. Как указано выше, такие гипотезы фазы кода обычно отображаются как диапазон сдвигов PN кода. Кроме того, гипотезы о доплеровской частоте обычно представляются как элементы разрешения по доплеровской частоте.
Корреляция обычно выполняется за время интегрирования "I", которое может быть выражено как произведение Nc и М, где Nc - время когерентного интегрирования и М - число когерентных интегрирований, которые некогерентно объединяются. Для конкретного PN кода значения корреляции обычно связываются с соответствующими сдвигами PN кода и элементами разрешения по доплеровской частоте для определения двумерной корреляционной функции. Пики корреляционной функции располагаются и сравниваются с заданным шумовым порогом. Порог обычно выбирается так, чтобы вероятность ложной тревоги, вероятность ложного обнаружения спутниковой передачи были бы близки к заданному значению или были ниже его. Измерение времени для спутника обычно извлекается из расположения первого непобочного пика лепестка по измерению фазы кода, который равен порогу или превышает его. Доплеровское измерение для абонентской станции может быть получено из местоположения первого непобочного пика лепестка по измерению доплеровской частоты, которая равна порогу или превышает его.
Корреляция принятого сигнала с множественными версиями последовательности PN кода, в диапазоне гипотез фазы кода для обнаружения принятого сигнала, расходует мощность и ресурсы обработки. Такое расходование мощности и ресурсов обработки создает обычно критические ограничения конструкции в портативных изделиях, например в мобильных телефонах и в других устройствах.
Раскрытие изобретения
Раскрыты система и/или способ сокращения диапазона для детектирования одного или нескольких атрибутов в одном навигационном сигнале, принятом в опорном местоположении, основываясь, по меньшей мере, частично, на информации, полученной от предыдущего обнаружения другого навигационного сигнала в опорном местоположении. Следует понимать, однако, что это только пример описанного здесь конкретного варианта реализации, и что заявленный объект изобретения не ограничивается этим. Посредством сокращения диапазона для детектирования одного или нескольких атрибутов в навигационном сигнале детектирование одного или нескольких атрибутов может быть достигнуто быстрее и/или с использованием меньших ресурсов.
Краткое описание чертежей
Не ограничивающие и не исчерпывающие все возможности варианты осуществления рассматриваются со ссылкой на следующие чертежи, на которых подобные цифровые обозначения относятся к подобным частям среди различных чертежей.
Фиг.1A изображает схематичную диаграмму системы спутникового позиционирования (SPS) в соответствии с вариантом осуществления.
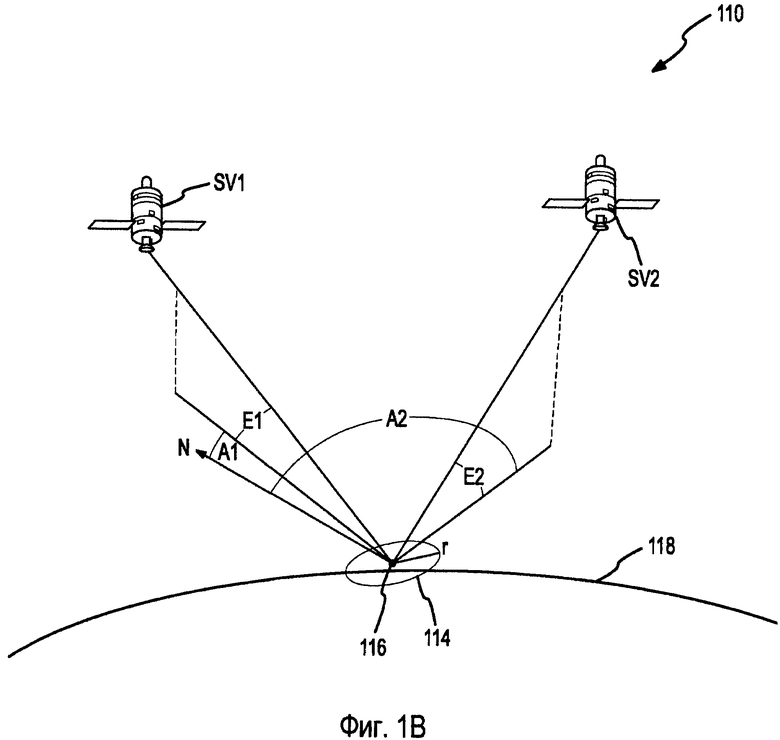
Фиг.1B - схематичная диаграмма системы, пригодной для определения местоположения приемника посредством измерения псевдодальности до космических аппаратов (SV) в соответствии с вариантом осуществления.
Фиг.2 - блок-схема последовательности операций, иллюстрирующая процесс обнаружения сигнала от SV, закодированного с периодически повторяющимся PN кодом в соответствии с вариантом осуществления.
Фиг.3 - схематичная диаграмма двумерной области, предназначенной для осуществления поиска для детектирования сигнала, переданного от космического аппарата в соответствии с вариантом осуществления.
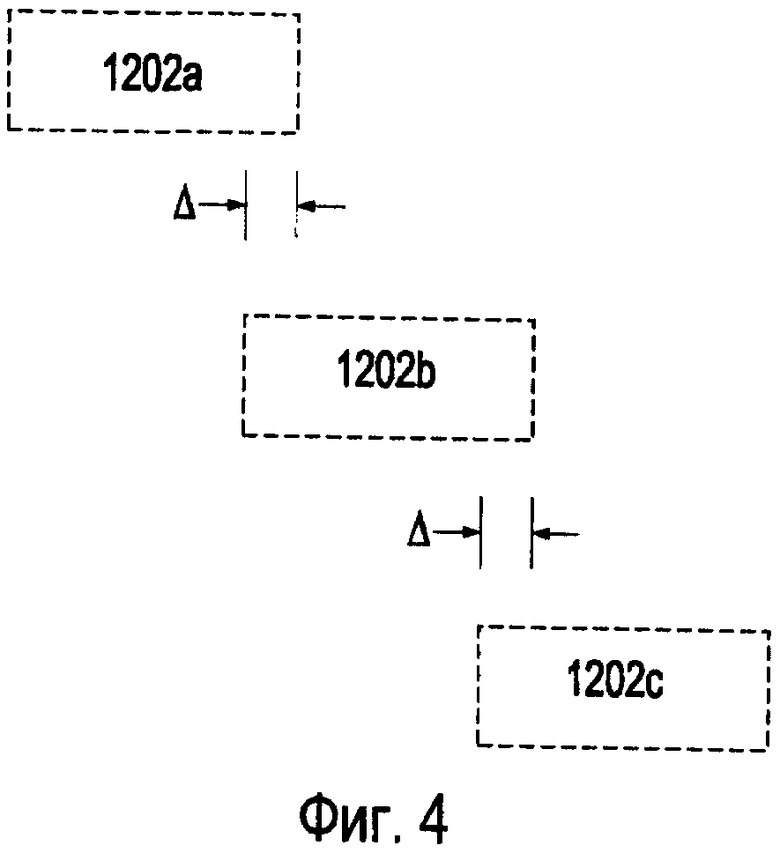
Фиг.4 иллюстрирует перекрытие ранее заданного числа чипов в окне поиска, чтобы избежать пропуска пиков, которые появляются в границах сегмента в соответствии с вариантом осуществления.
Фиг.5 - схематичная диаграмма системы для обработки сигналов для определения местоположения в соответствии с вариантом осуществления.
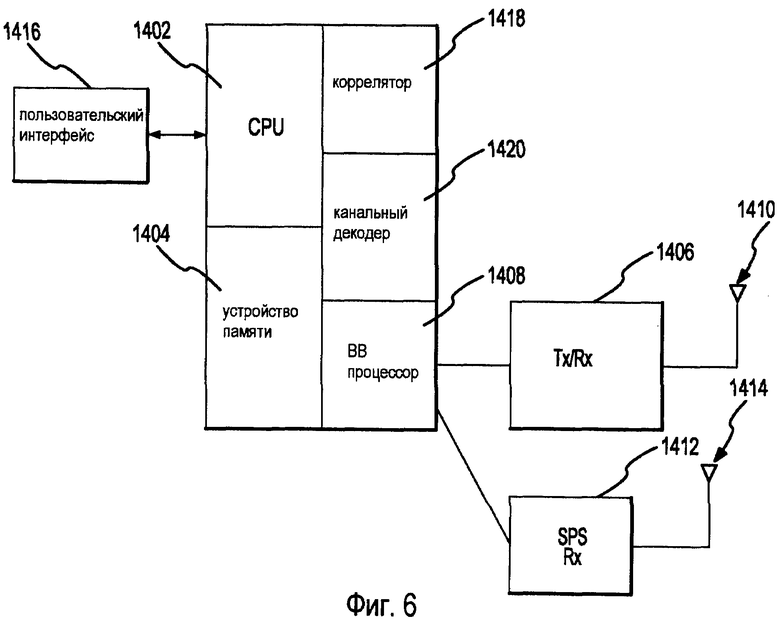
Фиг.6 - схематичная диаграмма абонентской станции в соответствии с вариантом осуществления.
Осуществление изобретения
Ссылка в данном описании на "один вариант осуществления" или "вариант осуществления" означает, что конкретный признак, структура или характеристика, описанная в связи с вариантом осуществления, включена, по меньшей мере, в один вариант осуществления заявленного объекта изобретения. Таким образом, появления фразы "в одном варианте осуществления" или "вариант осуществления" в различных местах по всему описанию не обязательно все относятся к одному и тому же варианту осуществления. Кроме того, конкретные признаки, структуры или характеристики могут быть объединены в одном или нескольких вариантах осуществления.
Описанные здесь методы могут быть осуществлены различными средствами в зависимости от приложений в соответствии с конкретными вариантами осуществления. Например, такие методы могут быть реализованы в аппаратных средствах, аппаратно-программном обеспечении, программном обеспечении и/или в их комбинациях. При осуществления в аппаратных средствах, например, блок обработки может быть осуществлен в одной или нескольких специальных интегральных схемах (ASIC), процессорах цифровых сигналов (DSP), цифровых устройствах обработки сигналов (DSPD), программируемых логических устройствах (PLD), программируемых вентильных матрицах (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, электронных устройствах, других специальных модулях, предназначенных для выполнения описанных здесь функций, и/или их комбинациях.
"Инструкции" в данном случае относятся к выражениям, которые представляют одну или несколько логических операций. Например, инструкции могут быть "машиночитаемыми" и интерпретируемыми машиной для выполнения одной или нескольких операций на одном или нескольких объектах данных. Однако это является только примером инструкций, и заявленный объект изобретения не ограничивается в этом отношении. В другом примере упоминаемые здесь инструкции могут относиться к закодированным командам, которые выполняются схемой обработки, имеющей набор команд, который включает в себя закодированные команды. Такая инструкция может быть закодирована в виде машинного языка, понимаемого схемой обработки. И это также является только примерами инструкций, и заявленный объект изобретения не ограничивается в этом отношении.
"Носитель хранения" в данном случае относится к носителям, способным поддерживать выражения, которые воспринимаются одной или несколькими машинами. Например, носитель хранения может содержать одно или несколько запоминающих устройств для хранения машиночитаемых инструкций и/или информации. Такие запоминающие устройства могут содержать любую из нескольких типов носителей, включая в себя, например, магнитные, оптические или полупроводниковые носители хранения. Такие запоминающие устройства могут также содержать любого типа долговременное, кратковременное, энергозависимое или энергонезависимое устройства памяти. Однако это только примеры запоминающего устройства, и объект изобретения не ограничивается в этом отношении.
Если специально не оговорено обратное или это очевидно из следующего рассмотрения, то используемые в описании термины, такие как "обработка", "вычисление", "расчет", "выбор", "формирование", "предоставление", "запрещение", "расположение", "окончание", "идентификация", "инициализация", "детектирование", "получение", "хостинг", "поддержание", "представление", "оценка", "прием", "передача", "определение" и/или подобные относятся к действиям и/или процессам, которые могут быть выполнены вычислительной платформой, например, компьютером или подобным электронным вычислительным устройством, которое управляет и/или преобразует данные, представленные как физические электронные и/или магнитные величины и/или другие физические величины в пределах процессоров вычислительной платформы, блоков памяти, регистров и/или других устройств хранения информации, передачи, приема и/или отображения. Такие действия и/или процессы могут быть выполнены посредством вычислительной платформы под управлением машиночитаемых инструкций, сохраненных в носителе хранения, например. Такие машиночитаемые инструкции могут содержать, например, программное обеспечение или аппаратно-программное обеспечение, сохраненное в носителе хранения, включенном в состав как часть вычислительной платформы (например, включенной в состав как часть схемы обработки или внешней относительно такой схемы обработки). Кроме того, если специально не оговорено обратное, процессы, описанные здесь в связи с блок-схемами последовательности операций или иным образом, могут также быть выполнены и/или управляться, полностью или частично, посредством такой вычислительной платформы.
"Космический аппарат" (SV) в данном случае относится к объекту, который пригоден для передачи сигналов к приемникам на поверхности Земли. В одном конкретном варианте осуществления такой SV может содержать геостационарный спутник. Альтернативно, SV может содержать спутник, находящийся на орбите и перемещающийся относительно стационарного положения Земли. Вместе с тем это только примеры SV, и заявленный объект изобретения не ограничивается в этом отношении.
"Местоположение" в данном случае относится к информации, связанной с местонахождением объекта или предмета в соответствии с опорной точкой. Здесь, например, такое местоположение может быть представлено как географические координаты, например, широта и долгота. В другом примере такое местоположение может быть представлено как координаты XYZ с Землей в начале координат. Еще в одном примере такое местоположение может быть представлено как уличный адрес, муниципалитет или другая правительственная территория, почтовый индекс и/или подобное этому. Однако это только примеры того, как местоположение может быть представлено в соответствии с конкретными вариантами осуществления, и заявленный объект изобретения не ограничивается в этом отношении.
Методики определения местоположения, описанные здесь, могут быть использованы для различных сетей беспроводной связи, например, беспроводной глобальной сети (WWAN), беспроводной локальной сети (WLAN), персональной беспроводной сети (WPAN) и т.д. Термин "сеть" и "система" могут быть использованы здесь взаимозаменяемо. WWAN может быть сетью множественного доступа с кодовым разделением (CDMA), сетью множественного доступа с временным разделением (TDMA), сетью множественного доступа с частотным разделением (FDMA), сетью множественного доступа с ортогональным частотным разделением (OFDMA), сетью множественного доступа с частотным разделением с единственной несущей частотой (SC-FDMA) и т.д. Сеть CDMA может осуществлять одну или несколько технологий радиодоступа (RAT), например, cdma2000, широкополосный CDMA (W-CDMA), и это только несколько радиотехнологий. Здесь cdma2000 может включать в себя технологии, осуществляемые в соответствии со стандартами IS-95, IS-2000 и IS-856. Сеть TDMA может осуществлять Глобальную Систему для Мобильной Связи (GSM), Усовершенствованную Цифровую Мобильную Телефонную Систему (D- AMPS) или некоторую другую RAT. Стандарты GSM и W-CDMA описаны в документах консорциума, называемого "Проект Партнерства 3-го Поколения" (3GPP). Стандарт Cdma2000 описан в документах консорциума, называемого "Проект Партнерства 3-го Поколения 2" (3GPP2). Документы 3GPP и 3GPP2 являются общедоступными. WLAN может содержать сеть IEEE 802.11x, и WPAN могут содержать сеть Bluetooth, IEEE 802.15x, например. Данные методы определения местоположения могут также быть использованы при любой комбинации WWAN, WLAN и/или WPAN.
В соответствии с вариантом осуществления устройство и/или система может оценить свое местоположение, основываясь, по меньшей мере, частично, на сигналах, принятых от SV. В частности, такое устройство и/или система могут получать измерения "псевдодальности", содержащие приближения расстояний между связанными SV и приемником навигационного спутника. В конкретном варианте осуществления такая псевдодальность может быть определена в приемнике, который пригоден для обработки сигналов от одного или нескольких SV как части Спутниковой Системы Позиционирования (SPS). Такая SPS может содержать, например, Глобальную Систему Позиционирования (GPS), Galileo, Glonass или любую SPS, разработанную в будущем. Для определения своего местоположения спутниковый навигационный приемник может получать измерения псевдодальности для трех или более спутников, так же, как их положения во время передачи. Зная орбитальные параметры SV, эти положения могут быть заранее рассчитаны для любой точки. Измерение псевдодальности может быть затем выполнено, основываясь, по меньшей мере, частично, на времени, за которое сигнал распространяется от SV до приемника, умноженном на скорость света. Хотя описанные здесь методы могут быть предоставлены как выполнение определения местоположения в GPS и/или SPS типа Galileo, как определенные иллюстрации в соответствии с конкретным вариантом осуществления, следует понимать, что эти методы могут также применяться к другим типам SPS, и что заявленный объект изобретения не ограничивается в этом отношении.
"Глобальная Навигационная Спутниковая Система" (GNSS) в данном случае относится к SPS, содержащей SV, передающие синхронизированные навигационные сигналы в соответствии с обычным сигнальным форматом. Такая GNSS может содержать, например, группировку SV на синхронизированных орбитах для передачи навигационных сигналов для местоположений на обширном участке поверхности Земли одновременно от множества SV в группировке. Тот SV, который является элементом конкретной группировки GNSS, обычно передает навигационные сигналы в формате, который является уникальным для конкретного формата GNSS. Соответственно, методики для обнаружения навигационного сигнала, переданного посредством SV в первой GNSS, могут быть изменены для обнаружения навигационного сигнала, переданного SV во второй GNSS. В конкретном примере, хотя заявленный объект изобретения не ограничивается в этом отношении, следует понимать, что GPS, Galileo и Glonass, каждая представляет GNSS, которая отличается от других двух названных SPS. Однако это только примеры SPS, связанных с отличающейся GNSS, и заявленный объект изобретения не ограничивается в этом отношении.
В соответствии с вариантом осуществления, навигационный приемник может получать измерение псевдодальности для конкретного SV, основываясь, по меньшей мере, частично, на обнаружении сигнала от конкретного SV, который закодирован с периодическим повторением последовательности PN кода. Обнаружение такого сигнала может содержать детектирование "фазы кода", которая привязана ко времени и связана с точкой в последовательности PN кода. В одном конкретном варианте осуществления, например, такая фаза кода может быть привязана к состоянию локально сгенерированного синхронизирующего сигнала и конкретному чипу в последовательности PN кода. Однако, это только пример того, как фаза кода может быть представлена, и заявленный объект изобретения не ограничивается в этом отношении.
В соответствии с вариантом осуществления, детектирование фазы кода может предоставить несколько неоднозначных вариантов псевдодальности или гипотез о псевдодальности для интервалов PN кода. Соответственно, навигационный приемник может получить измерение псевдодальности для SV, основываясь, по меньшей мере, частично, на обнаруженной фазе кода и разрешающей способности неоднозначностей для выбора одного из гипотез о псевдодальности в качестве измерения псевдодальности для SV. Как указано выше, навигационный приемник может оценить свое местоположение, основываясь, по меньшей мере, частично, на измерениях псевдодальности, полученных от множественных SV.
Как показано ниже в соответствии с конкретным вариантом осуществления, навигационный приемник может обнаружить первый сигнал от первого SV для детектирования фазы кода первого сигнала. При обнаружении второго сигнала от второго SV навигационный приемник может выявлять фазу кода в ограниченном диапазоне поиска фазы кода во втором сигнале, основываясь, по меньшей мере, частично, на фазе кода обнаруженного первого сигнала. Соответственно, фаза кода обнаруженного первого сигнала позволяет такому навигационному приемнику обнаружить второй сигнал быстрее, и/или используя меньше ресурсов для обработки.
На фиг.1B показана схематичная диаграмма системы, пригодной для определения местоположения в приемнике посредством измерения псевдодальности до SV. Приемник в опорном местоположении 116 на земной поверхности 118 может принимать сигналы от SV1 и SV2, находясь в прямой видимости с ними. Местоположение 116 может быть известно как находящееся в пределах области 114, определенной, например, посредством окружности радиусом приблизительно 10 км. Следует понимать, что это только пример того, как неопределенность оцененного местоположения может быть представлена в соответствии с конкретным вариантом осуществления, и заявленное изобретение не ограничивается в этом отношении. В одном варианте осуществления область 114 может содержать зону покрытия конкретной соты сети сотовой беспроводной связи в известном местоположении.
В соответствии с вариантом осуществления, приемник в опорном местоположении 116 может связываться с другими устройствами, например, с сервером (не показан) по наземной сети беспроводной связи. В одном конкретном варианте осуществления такой сервер может передавать сообщения поддержки обнаружения (AA) на приемник, содержащие информацию, используемую приемником для обработки сигналов, принятых от SV, и/или получать измерения псевдодальности. Альтернативно, такие сообщения AA могут быть предоставлены из информации, локально сохраняемой в памяти приемника. В данном случае такая локально сохраняемая информация может быть сохранена в локальной памяти от сменного устройства памяти и/или получена из предыдущего сообщения AA, принятого от сервера, что упоминается только в качестве примеров. В конкретном варианте осуществления сообщения AA могут содержать такую информацию как, например, информация, показывающая положения SV1 и SV2, оценку опорного местоположения 116, неопределенность, связанную с оцененным местоположением, и/или подобную этому. Такая информация указывает положения SV1 и SV2, может содержать эфемеридную информацию и/или календарную информацию. Как указано ниже, в соответствии с конкретными вариантами осуществления, приемник может оценить положения SV1 и SV2, основываясь, по меньшей мере, частично, на такой эфемериде и/или календаре и грубой оценке времени. Такое оцененное положение SV может содержать, например, оцененный азимутальный угол от опорного направления и угол возвышения от горизонта Земли в опорном местоположении 116, и/или координаты XYZ в земной системе координат. Как показано на фиг.1B, SV1 имеет оцененное положение, характеризуемое оцененным азимутальным углом А1 между севером и проекцией линии обзора для SV1 от опорного местоположения 116 на горизонт Земли в опорном местоположении 116. Оцененное положение SV1 также показано как характеризуемое посредством оцененного угла Е1 возвышения от горизонта Земли в опорном местоположении 116. Оцененное положение SV2 может быть аналогично охарактеризовано оцененным азимутальным углом A2 и углом E2 возвышения.
На фиг.2 показана блок-схема последовательности операций процесса 200 для обнаружения сигналов от SV в соответствии с вариантом осуществления. В соответствии с вариантом осуществления приемник может принимать первый сигнал, закодированный с первым периодически повторяющимся PN кодом от первого SV (например, SV1), и принимать второй сигнал, закодированный со вторым периодически повторяющимся PN кодом от второго SV (например, SV2). Для обнаружения первого сигнала в блоке 202 такой приемник может детектировать Доплеровскую частоту в принятом сигнале посредством корреляции кода и/или сдвинутых по времени версий локально сгенерированной кодовой последовательности с принятым первым сигналом. В конкретном примере, где первый SV передает сигнал GPS, закодированный с периодически повторяющимся PN кодом длительностью 1023 чипов, принимаемый сигнал может коррелироваться с 1023 версиями соответствующей локально сгенерированной кодовой последовательности, кодом и/или сдвинутым по времени приращением в один чип. Однако это только пример того, как сигнал от SV конкретной GNSS может быть обнаружен, и заявленный объект изобретения не ограничивается в этом отношении. Такая операция корреляции может быть выражена в соответствии со следующим соотношением (1):

где m - число чипов в периодически повторяющейся последовательности PN кода сигнала, принятого от SV1;
CP1 - фаза кода, продетектированная в сигнале, принятом от SV1 в опорный момент;
Chipli - i-тый чип в локально сгенерированной последовательности PN кода для SV1, 0≤i<m;
RSli - i-тый сегмент в сигнале, принятом от SV1, 0≤i<m;
Как можно видеть из вышеприведенного соотношения (1), величина h находится в диапазоне поиска от 0 до m-1, задавая выполнение числа m операций корреляции на сигнале, принятом от SV1, для исчерпывающего поиска гипотез для фазы кода во всем интервале PN кода для обнаружения результата максимальной корреляции. Как показано ниже, приемник может оценить фазу кода сигнала, принятого от второго SV, основываясь, по меньшей мере, частично, на оценках положений первого SV, второго SV и местоположения приемника. В блоке 204 приемник может получить информацию, описывающую положения первого и второго SV от любого из нескольких источников, например, из календарной или эфемеридной информации, локально сохраняемой и/или принятой в сообщении AA. Такое сообщение AA может также предоставить оценку времени. Используя такую оценку времени, информацию, описывающую положения первого и второго SV, и оценку положения приемника, блок 204 может оценить угол возвышения первого и второго SV, Е1 и E2 и азимуты первого и второго SV, А1 и A2, отнесенные к оцененному положению приемника.
В блоке 206 приемник может оценить фазу кода принятого сигнала от второго SV, основываясь, по меньшей мере, частично, на фазе кода, продетектированной в блоке 202, и оценках А1, A2, Е1 и E2. В соответствии с вариантом осуществления, блок 206 может вычислять разность между оценкой дальности от опорного местоположения 116 до SV1 ("RSV1") и оценкой дальности от опорного местоположения 116 до SV2 ("RSV2"). В данном случае блок 206 может получать информацию AA от одного или нескольких сообщений AA, указывая, например, оценки местоположений SV1 и SV2 в координатах XYZ Земной системы координат, в дополнение к оценке координат XYZ Земной системы координат для местоположения 116. Используя такие координаты XYZ Земной системы координат, блок 206 может вычислить Евклидовы расстояния для RSV1 и RSV2.
В конкретном варианте осуществления, где SV1 и SV2 принадлежат той же самой системе GNSS (например, и SV1 и SV2 являются частью или GPS, или Galileo группировок), фаза кода в сигнале от SV2 CP2 может быть оценена в соответствии со следующим соотношением (2):
E[CP2]=[(T1-T2)+CP1]modPNI, для (T2-T1)+CP1
 0
0
E[CP2]={(N*PNI)+[(T2-T1)+CP1]}mod PNI, для (T2-T1)+CP1<0, где N - положительное целое число, такое что (N*PNI)+[(T2-T1)+CP1]0 (2)
где:
Т1 - задержка распространения сигнала от SV1, измеренная приемником;
T2 - задержка распространения сигнала от SV2, измеренная приемником;
PNI - периодически повторяющийся кодовый интервал сигналов, принятых от SV1
и SV2; и
CP1 - продетектированная фаза кода сигнала, принятого от SV1 (например, как определено в соответствии с соотношением (1)).
В соответствии с вариантом осуществления, значения для T1 и T2 могут быть выражены следующим образом:
где:
с - скорость света;
τ - систематическая ошибка синхронизатора приемника;
RSV1 - оценка дальности до SV1 от опорного местоположения; и
RSV2 - оценка дальности до SV2 от опорного местоположения.
В конкретном варианте осуществления, где систематическая ошибка синхронизатора приемника является обычной и идентичной для T1 и T2, оцененная фаза кода в сигнале от SV2, как выражено в соотношении (2), может быть снижена. Здесь выражение для T2-T1 может быть предоставлено следующим образом:
T2-T1=[(RSV2/c)-τ]-[(RSV1/c)-τ]=(RSV2/c)-(RSV1/1)
Соответственно, выражение (2) может тогда быть представлено в следующем виде:
E[CP2]={[(RSV2/c)-(RSV1/c)]+CP1}mod PNI, для [(RSV2/c)-(RSV1/c)]+CP1
 0;
0;
и
E[CP2]={(N*PNI)+[(RSV2/c)-(RSV1/c)]+CP1}mod PNI, для [(RSV2/c)-(RSV1/c)]+CP1<0, где N - положительное целое число, такое что (N*PNI)+[(RSV2/c)-(RSV1/c)]+CP1
0.
В альтернативном варианте осуществления SV1 и SV2 могут быть элементами различных группировок GNSS. В конкретном примере, в качестве иллюстрации, SV1 может быть элементом группировки GPS, в то время как SV2 - элементом группировки Galileo. В этом конкретном варианте осуществления следует отметить, что переданный SV1 сигнал может быть закодирован с последовательностью PN кода, которая повторяется с периодами 1,0 мс, тогда как SV2 закодирован с последовательностью PN кода, которая повторяется с периодами 4,0 мс. Альтернативно, SV1 может быть элементом группировки Galileo, в то время как SV2 может быть элементом группировки GPS. В этом конкретном варианте осуществления следует отметить, что переданный SV1 сигнал может быть закодирован с последовательностью PN кода, которая повторяется с периодами 4,0 мс, в то время как SV2 закодирован с последовательностью PN кода, которая повторяется с периодами 1,0 мс. Однако это только примеры того, как SV1 и SV2 могут принадлежать различным группировкам GNSS, которые передают сигналы, закодированные с последовательностями PN кода, повторяющимися с различными периодами, и заявленный объект изобретения не ограничивается в этом отношении.
В конкретном варианте осуществления, где SV1 является элементом группировки Galileo и SV2 - элементом группировки GPS, фаза кода в сигнале от SV2 может быть оценена в соответствии со следующим соотношением (3):
E[CP2]={[(RSV2/c)-(RSV1/c)]+CP1}mod PNIGPS, для [(RSV2/c)-(RSV1/c)]+CP1
0;
и
E[CP2]={(N*PNIGPS)+[(RSV2/c)-(RSV1/c)]+CP1}mod PNIGPS, для [(RSV2/c)-(RSV1/c)]+CP1<0, где N - положительное целое число, такое что (N*PNIGPS)+[(RSV2/c)-(RSV1/c)]+CP1
0 (3)
(3)
где:
с - скорость света;
PNIGPS - периодически повторяющийся кодовый интервал сигналов, принятых от SV2;
СР1 - продетектированная фаза кода сигнала, принятого от SV1 (например, как определено в соответствии с соотношением (1));
RSV1 - оценка дальности до SV1 от опорного местоположения; и
RSV2 - оценка дальности до SV2 от опорного местоположения.
Здесь следует отметить, что отношение (3) в его сокращенной форме удаляет систематическую ошибку синхронизатора приемника, как показано выше.
В соответствии с вариантом осуществления, хотя заявленный объект изобретения не ограничивается в этом отношении, блок 208 может определять диапазон поиска фазы кода для детектирования фазы кода в сигнале, принятом от SV2, как E[CP2]+/-εCP2, где εCP2 отображает одностороннюю неопределенность фазы кода в принятом сигнале вблизи E[CP2]. В соответствии с вариантом осуществления блок 208 может определить такую одностороннюю неопределенность εCP2 в соответствии со следующим соотношением (4):

где:
с - скорость света;
А1 - оцененный азимутальный угол для SV1 от опорного местоположения;
A2 - оцененный азимутальный угол для SV2 от опорного местоположения;
Е1 - оцененный угол возвышения для SV1 от опорного местоположения;
E2 - оцененный угол возвышения для SV2 от опорного местоположения; и
Punc - односторонняя неопределенность в опорном местоположении в единицах длины.
В соответствии с вариантом осуществления, хотя заявленный объект изобретения не ограничивается в этом отношении, значения для А1, A2, E1, E2 и Punc могут быть получены из одного или нескольких сообщений AA, как указано выше, или локально, как сохраняемые в самом приемнике. Диапазон поиска фазы кода, определяемый как E[CP2]+/-εCP2 в соответствии с конкретным вариантом осуществления, может быть использован приемником для ограничения диапазона поиска фазы кода, вблизи которого он отыскивает фазу кода при обнаружении сигнала, принятого от SV2. В конкретном варианте осуществления, хотя заявленный объект изобретения не ограничивается в этом отношении, приемник может попытаться выполнить корреляцию сигнала, принятого от SV2, в блоке 210 с ограниченным числом версий кода и/или сдвинутой по времени последовательностью PN кода в соответствии со следующим соотношением (5):

где:
n - число чипов в периодически повторяющемся интервале PN кода сигнала, принятого от SV2;
CP2 - фаза кода, продетектированная в сигнале, принятом от SV2;
Chip2i - i-тый чип в локально сгенерированной последовательности PN кода для SV2, 0≤i<n;
RS2i - i-тый сегмент в сигнале, принятом от SV2, 0≤i<n;
θ - индекс, связанный с центром диапазона поиска фазы кода, ассоциированным с ожидаемой фазой кода сигнала, принятого от SV2; и
ρ - одностороннее смещение к θ, определяющее диапазон поиска.
Здесь, как видно из соотношения (5), операция корреляции выполняется в ограниченном диапазоне для h, θ-ρ≤h≤θ-ρ, а не для всего диапазона 0≤h≤n-1, как выполняется в операции корреляции в приведенном выше соотношении (1). В соответствии с конкретным вариантом осуществления, хотя заявленный объект изобретения не ограничивается в этом отношении, центр θ диапазона поиска фазы кода может основываться, по меньшей мере, частично, на оценке фазы кода сигнала, принятого от SV2, определенной в соответствии с соотношением (2) или (3). Здесь, например, E[CP2] и θ, могут быть связаны посредством постоянно связанных чипов в последовательности PN кода со временем. Аналогично, одностороннее смещение ρ может быть определено, по меньшей мере, частично, по односторонней неопределенности εCP2, определенной выше в соответствии с соотношением (4), где ρ и εCP2 связаны константой, ассоциирующей чипы в последовательности PN кода с временем, например.
В конкретном варианте осуществления, где SV1 является элементом группировки GPS, в то время как SV2 - элементом группировки Galileo, E[CP2] в соответствии с соотношением (3) является неоднозначным в пределах 4,0 мс периодически повторяющегося кодового интервала. В этом конкретном варианте осуществления CP1 может быть использовано для определения четырех гипотез для ожидаемой фазы кода в сигнале от SV2, разделенных интервалами в 1,0 мс. В данном случае первое предположение (i) может быть определено как E[CP2], как показано выше. Соответственно, четыре предположения (i), (ii), (iii) и (iv) могут быть определены следующим образом:

где:
PNIGPS - продолжительность периода для периодически повторяющейся последовательности PN кода сигнала, принятого от SV1; и
PNIGal - продолжительность периода для периодически повторяющейся последовательности PN кода сигнала, принятого от SV2.
В соответствии с конкретным вариантом осуществления, хотя заявленный объект изобретения не ограничивается в этом отношении, блок 206 может сформулировать множество диапазонов поиска фазы кода, связанных с множеством гипотез фазы кода. Продолжая снова показанный выше пример, где SV1 является элементом группировки GPS, в то время как SV2 - элемент группировки Galileo, такие диапазоны поиска фазы кода могут быть определены следующим образом:
где εCP2 отображает одностороннюю неопределенность фазы кода в принятом сигнале, определенном в соответствии с соотношением (4), как показано выше. После определения множества диапазонов поиска, связанных с множеством предположений, блок 210 может затем попытаться коррелировать локально сгенерированные последовательности PN кода по ограниченным диапазонам поиска фазы кода, как показано выше в связи с соотношением (5), и выбрать фазу кода среди диапазонов поиска, предоставляющую результат максимальной корреляции, например.
Как указано выше, в дополнение к детектированию фазы кода, обнаружение сигнала от GNSS SV может также включать в себя детектирование и/или измерение доплеровской частоты обнаруженного сигнала. В соответствии с альтернативным вариантом осуществления, хотя заявленный объект изобретения не ограничивается в этом отношении, оценка опорного местоположения 116 может также быть использована для сокращения диапазона детектирования доплеровской частоты сигнала от SV2 в блоке 210 при обнаружении сигнала после детектирования и/или измерения доплеровской частоты сигнала от SV1 в блоке 202. В соответствии с вариантом осуществления, доплеровские частоты сигналов от SV1 и SV2, измеренные и/или продетектированные в приемнике в опорном местоположении 116, могут быть выражены следующим образом:
где:
ξ - ошибка частоты синхронизатора приемника;
TrueDoppSV1 - истинная доплеровская частота сигнала, принятого от SV1 в опорном местоположении;
TrueDoppSV2 - истинная доплеровская частота сигнала, принятого от SV2 в опорном местоположении;
DoppSV1 - продетектированная и/или измеренная доплеровская частота сигнала, обнаруженного от SV1; и
DoppSV2 - продетектированная и/или измеренная доплеровская частота сигнала, обнаруженного от SV2.
В данном случае следует заметить, что продетектированная и/или измеренная доплеровская частота в сигнале, принятом от SV2, может быть оценена, основываясь, по меньшей мере, частично, на доплеровской частоте, продетектированной в сигнале от SV1, в соответствии со следующим соотношением (6):

В данном случае следует заметить, что соотношение (6) удаляет составляющую ошибки по частоте тактового сигнала приемника. Как показано выше, значение для DoppSV1 может быть получено от обнаружения сигнала от SV1. В соответствии с конкретным вариантом осуществления, значения, связанные с TrueDoppSV1 и TrueDoppSV2, могут быть получены как оценки истинной доплеровской частоты в сообщении AA, предоставленном, например, как соответствующие центры окон доплеровского поиска для SV1 и SV2.
В соответствии с вариантом осуществления, диапазон для поиска доплеровской частоты в обнаружении сигнала, принятого от SV2, может быть определен как E[DoppSV2]+/-εDoppSV2, где εDoppSV2 содержит одностороннюю неопределенность доплеровской частоты сигнала, принятого от SV2 вблизи E[DoppSV2]. В соответствии с конкретным вариантом осуществления, хотя заявленный объект изобретения не ограничивается в этом отношении, εDoppSV2 может быть определено, основываясь, по меньшей мере, частично, на неопределенности, связанной с точностью опорного местоположения приемника в соответствии со следующим соотношением (7):

где:
к - постоянная, связывающая неопределенность положения по длине к неопределенности в единицах частоты (например, Гц);
А1 - оцененный азимутальный угол для SV1 от опорного местоположения;
A2 - оцененный азимутальный угол для SV2 от опорного местоположения;
Е1 - оцененный угол возвышения для SV1 от опорного местоположения;
E2 - оцененный угол возвышения для SV2 от опорного местоположения; и
Punc - односторонняя неопределенность в опорном местоположении в единицах длины.
В данном случае значение для к может быть определено с использованием экспериментальных и/или эмпирических методов. В одном конкретном варианте осуществления, хотя заявленный объект изобретения не ограничивается в этом отношении, к может предположительно иметь значение 1,0 Гц на км неопределенности, например. Однако это только пример того, как неопределенность в местоположении может количественно влиять на неопределенность в области доплеровского поиска, и заявленный объект изобретения не ограничивается в этом отношении.
Следует отметить, что значение εDoppSV2, как определено в соответствии с соотношением (7), может привести к окну доплеровского поиска, которое больше окна доплеровского поиска, определенного в соответствии с информацией в сообщении AA. Соответственно, в альтернативном варианте осуществления εDoppSV2 может быть выбрано как минимум:
(i) окна одностороннего доплеровского поиска, предоставленного информацией в AA сообщении; и
(ii) односторонней доплеровской неопределенности, основанной, по меньшей мере, частично, на неопределенности местоположения, как показано выше в соотношении (7).
В соответствии с вариантом осуществления, SV, видимый приемником (например, как указано в сообщении AA), может быть связан с определенным набором параметров окна поиска, определяющих двумерную область фазы кода и гипотез о доплеровской частоте, предназначенных для осуществления поиска SV. В одном осуществлении, показанном на фиг.3, параметры окна поиска для SV содержат размер окна поиска фазы кода, WIN_SIZECP, центр окна фазы кода, WIN_CENTCP, размер окна доплеровского поиска, WIN_SIZEDOPP и центр доплеровского окна, WIN_CENTDOPP. В случае, когда объект, положение которого разыскивается для определения, является абонентской станцией в системе беспроводной связи, соответствующей стандарту IS-801, эти параметры могут быть указаны посредством сообщения AA, предоставленного в абонентскую станцию посредством PDE.
Двумерное пространство поиска для SV показано на фиг.3 с осью фазы кода по горизонтальной оси и осью доплеровской частоты по вертикальной оси, но это обозначение является произвольным и может быть изменено на противоположное. Центр окна поиска фазы кода обозначен как WIN_CENTCP, и размер окна поиска фазы кода обозначен как WIN_SIZECP. Центр окна поиска доплеровской частоты обозначен как WIN_CENTDOPP, и размер окна поиска доплеровской частоты обозначен как WIN_SIZEDOPP.
Вслед за обнаружением первого сигнала от первого SV, в соответствии с вариантом осуществления, WIN_CENTCP и WIN_SIZECP для обнаружения второго сигнала от второго SV могут быть определены, основываясь, по меньшей мере, частично, на фазе кода, продетектированной в первом обнаруженном сигнале, оценке местоположения приемника и информации, описывающей местоположения для первого и второго SV. В данном случае пространство поиска для обнаружения второго сигнала может быть разделено на множество сегментов 1202a, 1202b, 1202c, каждый из которых характеризуется пределами доплеровских частот и пределами кодовых временных сдвигов.
В соответствии с вариантом осуществления, при обнаружении сигнала от второго SV, вслед за обнаружением первых сигналов от первого SV, следует понимать, что WIN_CENTDOPP может быть определено, по меньшей мере, частично, по E[DoppSV2] в соответствии с соотношением (6). Аналогично, следует понимать что WIN_SIZEDOPP может быть определено, по меньшей мере, частично, по εDoppSV2 в соответствии с неопределенностью, связанной с опорным местоположением, как показано выше.
В соответствии с конкретным вариантом осуществления, когда единственный диапазон поиска задан для детектирования фазы кода в сигнале, принятом от SV2, следует понимать, что WIN_CENTCP может определяться, по меньшей мере, частично, в соответствии с E[CP2], заданным в соответствии с соотношением (2) или (3), как показано выше. Аналогично, следует понимать, что WIN_SIZECP может быть определено, по меньшей мере, частично, в соответствии с εСР2 в соответствии с соотношением (4). В конкретном варианте осуществления с множеством гипотез кода, как показано выше, множество окон поиска фазы кода могут быть заданы из множества центров окна фазы кода, ограниченных посредством WIN_SIZECP. В данном случае такие окна поиска фазы кода могут быть подобным образом заданы параметрами WIN_CENTCP и WIN_SIZECP, как показано выше.
В соответствии с вариантом осуществления, диапазон фаз кода, характеризующих сегмент, может быть равным пропускной способности канала коррелятора для поиска сегмента посредством прохода через один канал. В одном конкретном примере, где пропускная способность канала составляет тридцать два чипа, например, диапазон фаз кода, характеризующих сегмент, может аналогично составлять тридцать два чипа, но следует иметь ввиду, что другие примеры также возможны.
Сегменты можно сделать перекрывающимися заданным числом чипов во избежание пропуска пиков, которые появляются на границах сегмента, как показано на фиг.4. В данном случае концевая часть сегмента 1202a накладывается на переднюю часть сегмента 1202b посредством чипов Δ, и концевая часть сегмента 1202b аналогично накладывается на переднюю часть сегмента 1202c посредством чипов Δ. Из-за наложения вследствие этого перекрытия эффективный диапазон фаз кода, представленный сегментом, может быть меньше, чем пропускная способность канала. В случае, когда перекрытие составляет четыре чипа, например, эффективный диапазон фаз кода, представленный сегментом, может составлять двадцать восемь чипов.
Система для обнаружения периодически повторяющихся сигналов от SV показана на фиг.5 в соответствии с конкретным вариантом осуществления. Однако это только пример системы, которая является пригодной для обнаружения таких сигналов в соответствии с конкретным вариантом осуществления, и другие системы могут быть использованы без отклонений от сущности изобретения. Как показано на фиг.5, в соответствии с конкретным вариантом осуществления, такая система может содержать вычислительную платформу, включающую в себя процессор 1302, устройство памяти 1304 и коррелятор 1306. Коррелятор 1306 может быть приспособлен для формирования корреляционных функций из сигналов, предоставленных приемником (не показан), с целью обработки процессором 1302 или непосредственно, или через устройство памяти 1304. Коррелятор 1306 может быть осуществлен в аппаратных средствах, программном обеспечении или комбинации аппаратных средств и программного обеспечения. Однако это только примеры того, как коррелятор может быть осуществлен в соответствии с конкретными вариантами осуществления, и заявленное изобретение не ограничивается в этом отношении.
В соответствии с вариантом осуществления, устройство памяти 1304 может хранить машиночитаемые инструкции, которые являются доступными и выполнимыми процессором 1302, чтобы обеспечить, по меньшей мере, часть вычислительной платформы. В данном случае процессор 1302 в комбинации с такими машиночитаемыми командами может быть приспособлен для выполнения всего процесса или частей процесса 200, проиллюстрированного выше со ссылкой на фиг.2. В конкретном варианте осуществления, хотя заявленное изобретение не ограничивается в этом отношении, процессор 1302 может предписывать коррелятору 1306 осуществлять поиск сигналов определения положения, как показано выше, и получать измерения из корреляционных функций, созданных коррелятором 1306.
Согласно фиг.6, радиоприемопередатчик 1406 может быть приспособлен для модуляции несущего ВЧ сигнала информацией основной полосы, например, модуляции ВЧ несущей голосом или данными, и демодуляции модулированной ВЧ несущей для получения такой информации основной полосы. Антенна 1410 может быть приспособлена для передачи модулированной ВЧ несущей по каналу беспроводной связи и приема модулированной ВЧ несущей по каналу беспроводной связи.
Процессор 1408 сигналов основной полосы частот может быть приспособлен для предоставления информации основной полосы от CPU 1402 к приемопередатчику 1406 для передачи по каналу беспроводной связи. В данном случае CPU 1402 может получать такую информацию основной полосы от устройства ввода данных в пределах пользовательского интерфейса 1416. Процессор 1408 сигналов основной полосы частот может также быть приспособлен для предоставления информации основной полосы от приемопередатчика 1406 на CPU 1402 для передачи через устройство вывода в пределах пользовательского интерфейса 1416.
Пользовательский интерфейс 1416 может содержать множество устройств для ввода или вывода пользовательской информации, например, голоса или данных. Такие устройства могут включать в себя, например, клавиатуру, экран дисплея, микрофон и динамик.
Приемник 1412 может быть приспособлен для приема и демодуляции передач от SV и предоставления демодулированной информации на коррелятор 1418. Коррелятор 1418 может быть приспособлен для извлечения корреляционных функций, как показано выше в соотношениях (1) и (2), из информации, предоставленной приемником 1412. Для данного PN кода, например, коррелятор 1418 может сформировать корреляционную функцию, определенную в диапазоне фаз кода для установления окна поиска фазы кода, и в диапазоне гипотез о доплеровской частоте, как показано выше. Аналогично, может быть выполнена индивидуальная корреляция в соответствии с определенными параметрами когерентного и некогерентного интегрирования. Коррелятор 1418 может также быть приспособлен для извлечения связанных с пилот-сигналом корреляционных функций из информации, относящейся к пилот-сигналам, предоставляемым приемопередатчиком 1406. Эта информация может быть использована абонентским терминалом для обнаружения служб беспроводной связи. Канальный декодер 1420 может быть приспособлен для декодирования канальных символов, принятых от процессора 1408 основной полосы, в основные исходные биты. В одном примере, где канальные символы содержат символы закодированные сверткой, такой канальный декодер может содержать декодер Витерби. Во втором примере, где канальные символы содержат последовательные или параллельные конкатенации свернутых кодов, канальный декодер 1420 может содержать турбодекодер.
Память 1404 может быть приспособлена для хранения машиночитаемых инструкций, которые выполняются для осуществления одного или нескольких процессов, вариантов осуществления, воплощений или их примеров, которые были описаны или предложены. Центральный процессор, CPU 1402, может быть приспособлен для доступа и выполнения таких машиночитаемых инструкций. Посредством выполнения этих машиночитаемых инструкций CPU 1402 может предписывать коррелятору 1418 останавливаться на исполнении конкретных режимов поиска в блоках 204 и 220, анализировать корреляционные функции GPS, предоставленные коррелятором 1418, извлекать измерения из их пиков и определять, является ли достаточно точной оценка местоположения. Однако это только примеры задач, которые могут быть выполнены центральным процессором в конкретном варианте осуществления, и заявленный объект изобретения не ограничивается в этих отношениях.
В конкретном варианте осуществления CPU 1402 в абонентской станции может оценить местоположение абонентской станции, основываясь, по меньшей мере, частично, на сигналах, принятых от SV, как показано выше. Центральный процессор 1402 может также быть приспособлен для определения диапазона поиска кода для обнаружения второго принятого сигнала, основываясь, по меньшей мере, частично, на фазе кода, продетектированной в первых принятых сигналах, как показано выше в соответствии с конкретными вариантами осуществления. Следует понимать, однако, что это только примеры систем для оценки местоположения, основываясь, по меньшей мере, частично, на измерениях псевдодальности, определении количественной оценки таких измерений псевдодальности и окончании процесса для улучшения точности измерений псевдодальности в соответствии с конкретными вариантами осуществления, и что заявленное изобретение не ограничивается в этих отношениях.
Хотя было показано и описано то, что составляет примерные варианты осуществления, специалистам в данной области техники должно быть ясно, что возможны различные модификации и эквивалентные замены без отступления от сущности заявленного изобретения. Кроме того, множество модификаций может быть выполнено, чтобы приспособить конкретную ситуацию к принципам заявленного изобретения, без отклонения от описанной здесь центральной концепции. Поэтому предполагается, что заявленное изобретение не ограничивается раскрытыми конкретными вариантами осуществления и может также включать в себя все варианты осуществления, входящие в объем приложенных пунктов формулы изобретения и их эквивалентов.


Изобретение относится к определению местоположения на основе сигналов, принимаемых от геостационарных спутников. Техническим результатом является снижение расходования мощности и ресурсов обработки в мобильных телефонах и в других устройствах при детектирования одного или нескольких атрибутов в одном навигационном сигнале, принятом в опорном местоположении. Указанный технический результат достигается тем, что осуществляют детектирование фазы первого кода в первом, периодически повторяющемся псевдослучайном закодированном сигнале, принятом от первого космического аппарата (SV) в опорном местоположении; и определяют диапазон поиска фазы кода для детектирования фазы второго кода во втором, периодически повторяющемся псевдослучайном закодированном сигнале, принятом от второго SV в упомянутом опорном местоположении, на основе, по меньшей мере, частично, упомянутой продетектированной фазы кода упомянутого первого принятого сигнала, оцененного азимутального угла для упомянутого первого SV из упомянутого опорного местоположения и оцененного азимутального угла для упомянутого второго SV из упомянутого опорного местоположения. 8 н. и 18 з.п. ф-лы, 7 ил.
1. Способ сокращения диапазона для детектирования одного или более атрибутов в спутниковой системе, содержащий:
детектирование фазы первого кода в первом периодически повторяющемся псевдослучайном закодированном сигнале, принятом от первого космического аппарата (SV) в опорном местоположении; и
определение диапазона поиска фазы кода для детектирования фазы второго кода во втором периодически повторяющемся псевдослучайном закодированном сигнале, принятом от второго SV в упомянутом опорном местоположении, на основе, по меньшей мере, частично упомянутой детектированной фазы кода упомянутого первого принятого сигнала, орбитального параметра упомянутого первого SV и орбитального параметра упомянутого второго SV, в котором определение диапазона поиска фазы кода включает в себя:
определение оцененной фазы кода сигнала, принятого от второго SV, на основе, по меньшей мере, частично фазы первого кода, и
определение неопределенности фазы кода на основе, по меньшей мере, частично, орбитального параметра упомянутого первого SV и орбитального параметра упомянутого второго SV.
2. Способ по п.1, причем упомянутый диапазон поиска фазы кода основан, по меньшей мере, частично на оцененном угле возвышения для упомянутого первого SV из упомянутого опорного местоположения и оцененном угле возвышения для упомянутого второго SV из упомянутого опорного местоположения.
3. Способ по п.1, причем упомянутый первый SV относится к группировке GPS, а упомянутый второй SV относится к группировке Galileo.
4. Способ по п.1, причем упомянутое детектирование упомянутой фазы первого кода содержит корреляцию упомянутого первого сигнала с локально сгенерированной псевдослучайной последовательностью кода, ассоциированной с упомянутым первым SV.
5. Способ по п.1, причем упомянутое опорное местоположение содержит оценку местоположения приемника, приспособленного к приему упомянутых первого и второго сигналов.
6. Способ по п.5, причем упомянутый диапазон поиска фазы кода содержит заданное число элементарных сигналов за период упомянутого второго периодически повторяющегося псевдослучайного закодированного сигнала.
7. Способ сокращения диапазона для детектирования одного или более атрибутов в спутниковой системе, содержащий:
детектирование фазы первого кода первого периодически повторяющегося псевдослучайного закодированного сигнала, принятого от первого космического аппарата (SV) в опорном местоположении, причем упомянутый первый SV находится в группировке SV в первой Глобальной Навигационной Спутниковой Системе (GNSS); и
определение диапазона поиска фазы кода для детектирования фазы второго кода второго периодически повторяющегося псевдослучайного закодированного сигнала, принятого от второго SV в упомянутом опорном местоположении, основываясь, по меньшей мере, частично на упомянутой детектированной фазе первого кода, причем упомянутый второй SV находится в группировке SV во второй GNSS, отличной от упомянутой первой GNSS,
в котором определение диапазона поиска фазы кода включает в себя оценку фазы кода второго SV на основе, по меньшей мере, частично детектированной фазы первого кода и разности между оцененными диапазонами из опорного местоположения для первого и второго SV.
8. Способ по п.7, причем определение упомянутого диапазона поиска кода дополнительно содержит определение упомянутого диапазона поиска кода, основываясь, по меньшей мере, частично на оцененном азимутальном угле для упомянутого первого SV из упомянутого опорного местоположения и оцененном азимутальном угле для упомянутого второго SV из упомянутого опорного местоположения.
9. Способ по п.7, причем упомянутая первая GNSS содержит GPS, и упомянутая вторая GNSS содержит Galileo GNSS.
10. Способ по п.7, причем упомянутая первая GNSS содержит Galileo, и упомянутая вторая GNSS содержит GPS.
11. Способ по п.7, причем упомянутая первая GNSS содержит Galileo, и упомянутая вторая GNSS содержит Glonass.
12. Способ по п.7, причем упомянутая первая GNSS содержит Glonass, и упомянутая вторая GNSS содержит GPS.
13. Способ по п.7, причем упомянутая первая GNSS содержит GPS, и упомянутая вторая GNSS содержит Glonass.
14. Способ по п.7, причем упомянутая первая GNSS содержит Glonass, и упомянутая вторая GNSS содержит Galileo.
15. Способ по п.7, причем упомянутый первый периодически повторяющийся псевдослучайный закодированный сигнал содержит период более короткий, чем период упомянутого второго периодически повторяющегося псевдослучайного сигнала.
16. Изделие, содержащее:
носитель хранения, причем упомянутый носитель хранения содержит машиночитаемые инструкции для сокращения диапазона для детектирования одного или более атрибутов в спутниковой системе, сохраненные на нем, и которые при выполнении посредством вычислительной платформы приспособлены, чтобы побуждать упомянутую вычислительную платформу:
определять фазу первого кода в первом периодически повторяющемся псевдослучайном закодированном сигнале, принятом от первого космического аппарата (SV) в опорном местоположении; и
определять диапазон поиска фазы кода для детектирования фазы второго кода во втором периодически повторяющемся псевдослучайном закодированном сигнале, принятом от второго SV в упомянутом опорном местоположении на основе, по меньшей мере, частично упомянутой детектированной фазы кода упомянутого первого принятого сигнала, орбитального параметра упомянутого первого SV и орбитального параметра упомянутого второго SV, при этом определение диапазона поиска фазы кода включает в себя:
определение оцененной фазы кода сигнала, принятого от второго SV, на основе, по меньшей мере, частично фазы первого кода, и
определение неопределенности фазы кода на основе, по меньшей мере, частично орбитального параметра упомянутого первого SV и орбитального параметра упомянутого второго SV.
17. Изделие по п.16, причем упомянутые машиночитаемые инструкции при выполнении посредством упомянутой вычислительной платформы дополнительно приспособлены, чтобы побуждать упомянутую вычислительную платформу определять упомянутый диапазон поиска фазы кода на основе, по меньшей мере, частично оцененного угла возвышения для упомянутого первого SV из упомянутого опорного местоположения и оцененного угла возвышения для упомянутого второго SV из упомянутого опорного местоположения.
18. Изделие, содержащее:
носитель хранения, причем упомянутый носитель хранения содержит сохраненные на нем машиночитаемые инструкции для сокращения диапазона для детектирования одного или более атрибутов в спутниковой системе, которые при выполнении вычислительной платформой приспособлены побуждать упомянутую вычислительную платформу:
определять фазу первого кода первого периодически повторяющегося псевдослучайного закодированного сигнала, принятого от первого космического аппарата (SV) в опорном местоположении, причем упомянутый первый SV находится в группировке SV в первой Глобальной Навигационной Спутниковой Системе (GNSS); и
определять диапазон поиска фазы кода для детектирования фазы второго кода второго периодически повторяющегося псевдослучайного закодированного сигнала, принятого от второго SV в упомянутом опорном местоположении, на основании, по меньшей мере, частично упомянутой фазы первого кода, причем упомянутый второй SV находится в группировке SV во второй GNSS, отличной от упомянутой первой GNSS, при этом упомянутые инструкции приспособлены побуждать упомянутую вычислительную платформу определять диапазон поиска фазы кода посредством оценки фазы кода второго SV на основе, по меньшей мере, частично суммы фазы первого кода и разности между оцененными диапазонами из опорного местоположения для первого и второго SV.
19. Абонентский модуль для сокращения диапазона для детектирования одного или более атрибутов в спутниковой системе, содержащий:
приемник для приема сообщения поддержки обнаружения (АА), содержащего информацию, показывающую орбитальный параметр первого космического аппарата (SV) и орбитальный параметр второго SV, причем упомянутый абонентский модуль приспособлен для:
детектирования фазы первого кода в первом периодически повторяющемся псевдослучайном закодированном сигнале, принятом от упомянутого первого космического аппарата (SV) в упомянутом опорном местоположении; и
определения диапазона поиска фазы кода для детектирования фазы второго кода во втором периодически повторяющемся псевдослучайном закодированном сигнале, принятом от упомянутого второго SV в упомянутом опорном местоположении, основываясь, по меньшей мере, частично на упомянутой детектированной фазе кода упомянутого первого принятого сигнала, упомянутом орбитальном параметре упомянутого первого SV и упомянутом орбитальном параметре упомянутого второго SV, при этом определение диапазона поиска фазы кода включает в себя:
определение оцененной фазы кода сигнала, принятого от второго SV, на основе, по меньшей мере, частично фазы первого кода, и
определение неопределенности фазы кода на основе, по меньшей мере, частично орбитального параметра упомянутого первого SV и орбитального параметра упомянутого второго SV.
20. Абонентский модуль по п.19, причем упомянутый абонентский модуль дополнительно приспособлен для определения упомянутого диапазона поиска фазы кода, основываясь, по меньшей мере, частично на оцененном угле возвышения для упомянутого первого SV из упомянутого опорного местоположения и оцененном угле возвышения для упомянутого второго SV из упомянутого опорного местоположения.
21. Абонентский модуль по п.19, причем упомянутый абонентский модуль дополнительно приспособлен для приема упомянутого сообщения АА по каналу беспроводной связи.
22. Абонентский модуль для сокращения диапазона для детектирования одного или более атрибутов в спутниковой системе, содержащий:
приемник для приема сообщения поддержки обнаружения (АА), содержащего информацию, показывающую местоположения космических аппаратов (SV) в двух или нескольких Глобальных Навигационных Спутниковых Системах (GNSS), причем упомянутый абонентский модуль приспособлен для:
детектирования фазы первого кода первого периодически повторяющегося псевдослучайного закодированного сигнала, принятого от первого космического аппарата (SV) в опорном местоположении, причем упомянутый первый SV находится в группировке SV в первой из упомянутых GNSS; и
определения диапазона поиска фазы кода для детектирования фазы второго кода второго периодически повторяющегося псевдослучайного закодированного сигнала, принятого от второго SV в упомянутом опорном местоположении, основываясь, по меньшей мере, частично на упомянутой детектированной фазе первого кода, причем упомянутый второй SV находится в группировке SV во второй из упомянутых GNSS, отличной от упомянутой первой GNSS, при этом упомянутый абонентский модуль определяет диапазон поиска фазы кода посредством оценки фазы кода второго SV на основе, по меньшей мере, частично детектированной фазы первого кода и разности между оцененными диапазонами из опорного местоположения для первого и второго SV.
23. Абонентский модуль по п.22, причем упомянутый абонентский модуль дополнительно приспособлен для приема упомянутого сообщения АА по каналу беспроводной связи.
24. Система для сокращения диапазона для детектирования одного или более атрибутов в спутниковой системе, содержащая:
объект определения положения (PDE) и
абонентский модуль, причем абонентский модуль приспособлен для:
приема сообщения поддержки обнаружения (АА) от упомянутого PDE по каналу беспроводной связи, причем упомянутое сообщение АА содержит информацию, показывающую орбитальный параметр первого космического аппарата (SV) и орбитальный параметр второго SV;
детектирования фазы первого кода в первом периодически повторяющемся псевдослучайном закодированном сигнале, принятом от упомянутого первого космического аппарата (SV) в упомянутом опорном местоположении; и
определения диапазона поиска фазы кода для детектирования фазы второго кода во втором периодически повторяющемся псевдослучайном закодированном сигнале, принятом от упомянутого второго SV в упомянутом опорном местоположении, основываясь, по меньшей мере, частично на упомянутой детектированной фазе кода упомянутого первого принятого сигнала, упомянутом орбитальном параметре упомянутого первого SV и упомянутом орбитальном параметре упомянутого второго SV, при этом определение диапазона поиска фазы кода включает в себя:
определение оцененной фазы кода сигнала, принятого от второго SV, на основе, по меньшей мере, частично фазы первого кода, и
определение неопределенности фазы кода, на основе, по меньшей мере, частично орбитального параметра упомянутого первого SV и орбитального параметра упомянутого второго SV.
25. Система по п.24, причем упомянутый абонентский модуль дополнительно приспособлен для определения упомянутого диапазона поиска фазы кода, основываясь, по меньшей мере, частично на оцененном угле возвышения для упомянутого первого SV из упомянутого опорного местоположения и оцененном угле возвышения для упомянутого второго SV из упомянутого опорного местоположения.
26. Система для сокращения диапазона для детектирования одного или более атрибутов в спутниковой системе, содержащая:
объект определения положения (PDE) и
абонентский модуль, причем абонентский модуль, приспособленный для:
приема сообщения поддержки обнаружения (АА) от упомянутого PDE по каналу беспроводной связи, причем упомянутое сообщение АА содержит информацию, показывающую местоположения космических аппаратов (SV) в двух или нескольких Глобальных Навигационных Спутниковых Системах (GNSS);
детектирования фазы первого кода первого периодически повторяющегося псевдослучайного закодированного сигнала, принятого от первого космического аппарата (SV) в опорном местоположении, причем упомянутый первый SV находится в группировке SV в первой из упомянутых GNSS; и
определения диапазона поиска фазы кода для детектирования фазы второго кода второго периодически повторяющегося псевдослучайного закодированного сигнала, принятого от второго SV в упомянутом опорном местоположении, основываясь, по меньшей мере, частично на упомянутой детектированной фазе первого кода, причем упомянутый второй SV находится в группировке SV во второй из упомянутых GNSS, отличающейся от упомянутой первой GNSS, при этом упомянутый абонентский модуль приспособлен определять диапазон поиска фазы кода посредством оценки фазы кода второго SV на основе, по меньшей мере, частично детектированной фазы первого кода и разности между оцененными диапазонами из опорного местоположения для первого и второго SV.
| Пневматический прибор для шабровочных работ | 1936 |
|
SU49737A1 |
| EP 1083441 A2, 14.03.2001 | |||
| Погружной жидкостнозаполненный электродвигатель | 1986 |
|
SU1365255A1 |
| Шкив переменного диаметра для канатной и ременной передачи | 1934 |
|
SU49695A1 |
| US 2005080561 A1, 14.04.2005 | |||
| 0 |
|
SU153849A1 | |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ РАЗРЕШЕНИЯ НЕОДНОЗНАЧНОСТИ ПО ПСЕВДОДАЛЬНОСТИ ГЛОБАЛЬНОЙ СИСТЕМЫ ПОЗИЦИОНИРОВАНИЯ (ГСП) | 2000 |
|
RU2253127C2 |
| ШЕБШАЕВИЧ B.C | |||
| Сетевые спутниковые радионавигационные системы, 2-е изд., Радио и связь | |||
| - М., 1993, с.235-245, 285-291. | |||

