Изобретение относится к области управления, в частности управлению оптимальными обнаружителями сигналов и свойств различных процессов и к способам определения и установки величины порога обнаружения.
Из уровня техники известен способ определения порога обнаружения, при котором значение порога выбирается на основании требований применяемого критерия обнаружения в зависимости от отношения сигнал/шум и заданных характеристик обнаружения (Ю.М.Казаринов и др. Радиотехнические системы / Под ред. Ю.М.Казаринова. - М.: Сов. радио. - 1968. - 496 с.).
Существенным недостатком такого способа является то, что значение порога назначается исходя из требований к работе обнаружителя в конкретных условиях и остается неизменным на протяжении всего цикла обнаружения, что при сравнительно малых отношениях сигнал/шум, а также вследствие случайности принимаемых реализаций приводит к ошибкам обнаружения.
Известен способ управления порогом в оптимальном обнаружителе, в котором измеряют интенсивность шумов, значение которой затем используют для изменения порога обнаружения (Патент SU 1290541 A1, H 04 B 1/10, 15.02.1987). Согласно способу, изменение величины порога происходит детерминировано в зависимости от интенсивности шумов и с учетом максимально допустимого коэффициента глубины модуляции.
Недостатком данного способа является то, что существует определенная функциональная зависимость величины порога от отношения сигнал/шум и коэффициента глубины модуляции, что в случае преднамеренного (например, постановка помех) или случайного изменения уровня шума на входе обнаружителя произойдет ошибка в определении величины порога. Кроме того, для установления величины порога используется только лишь два параметра входного сигнала: отношение сигнал/шум и коэффициент глубины модуляции.
Наиболее близким по технической сущности является взятый в качестве прототипа способ, в котором управление порогом в оптимальном обнаружителе можно осуществлять по сложному алгоритму с учетом текущей оценки ряда параметров входного сигнала на интервале наблюдения (Радиоприемные устройства: Учеб. пособие для радиотехн. спец. вузов / Ю.Т.Давыдов, Ю.С.Данич, А.П.Жуковский и др. / Под ред. А.П.Жуковского. - М.: Высшая школа. - 1989. - 392 с).
Недостатками данного способа являются:
- необходимость оценки параметров входного сигнала на всем интервале наблюдения, что позволяет принять решение только по окончании всей серии наблюдений;
- непосредственная зависимость величины порога от оценки параметра, получить которую в условиях априорной определенности можно только эмпирически на основе обучающих выборок;
- в условиях действия естественных помех, а в особенности искусственно создаваемых помех, оценки входных параметров могут иметь низкую достоверность или оказаться ложными, что приводит к существенным ошибкам при установке порога обнаружения, а в случае возникновения неопределенности произойдет задержка в обнаружении сигнала.
Сущность изобретения состоит в том, что в известном способе, при котором управление порогом в оптимальном обнаружителе осуществляется по сложному алгоритму с учетом текущей оценки параметров входного сигнала на интервале наблюдения, дополнительно регистрируют момент времени изменения и наличие изменения сигналов на выходе безынерционных индикаторов неинформативных параметров сигнала, которые стохастически связаны с возможным изменением информативных параметров сигнала на входе обнаружителя, и по результату регистрации устанавливают новую величину порога.
Техническим результатом изобретения является сокращение времени обнаружения изменения информативных параметров сигналов при заданной достоверности обнаружения в условиях помех.
Изобретение осуществляется следующим образом.
Согласно оптимальному байесовскому последовательному правилу обнаружения, значение порога в момент n прекращения наблюдений определяется как

(Тартаковский А.Г. Оптимальное обнаружение изменений свойств случайных последовательностей // А и Т. 1987. - №8. - С.106-113).
где c00(n)- потери при правильном необнаружении на n-ом шаге; c11(n) - потери, при правильном обнаружении на n-ом шаге; c01(n) - потери, вызванные ложной тревогой на n-ом шаге; с10(n) - потери, вызванные пропуском входного сигнала на n-ом шаге; Аn=1-р(nΔ), p(nΔ) - априорное распределение момента обнаружения; Δ - интервал времени между шагами.
При этом с порогом hn сравнивается апостериорная вероятность изменения информативного параметра сигнала, а критерием оптимальности обнаружителя является минимум потерь при принятии решения.
Следует также отметить, что при постепенном изменении информативного параметра на входе обнаружителя справедливы следующие соотношения:
где  - потери, вызванные ложной тревогой,
- потери, вызванные ложной тревогой,  - потери, вызванные пропуском сигнала,
- потери, вызванные пропуском сигнала,  - потери, связанные с правильным необнаружением,
- потери, связанные с правильным необнаружением,  - потери, связанные с правильным обнаружением по окончании серии из N наблюдений; С(n-k) - стоимость задержки в принятии решения на (n-k) шагов; j=0; 1.
- потери, связанные с правильным обнаружением по окончании серии из N наблюдений; С(n-k) - стоимость задержки в принятии решения на (n-k) шагов; j=0; 1.
Технический результат изобретения достигается в результате использования информации с выхода безынерционных индикаторов неинформативных параметров сигнала, а именно для установления новой величины порога используется само наличие изменения и момент времени изменения сигналов на выходе безынерционных индикаторов неинформативных параметров сигнала, причем наличие изменения и момент изменения стохастически связаны с возможным изменением информативных параметров сигнала на входе обнаружителя.
Безынерционные индикаторы неинформативных параметров сигнала строятся на основе следующих известных технических устройств:
- радиотехнических измерителей мощности, амплитуды, частоты, фазы, длительности импульса, направления прихода отраженного сигнала и т.д.;
- радиотехнических фильтров, счетчиков импульсов, логических устройств и т.д.
Особенностью их функционирования является то, что выходной сигнал индикатора принимает два значения "0" или "1" в соответствии с не изменением или изменением регистрируемого неинформативного параметра на входе индикатора неинформативного параметра сигнала. Причем безынерционным считается такой индикатор, сигнал на выходе которого формируется ранее, чем успевает измениться выходной сигнал обнаружителя. Регистрируемый с помощью индикатора неинформативный параметр фиксирует какую-либо особенность реализации наблюдаемого сигнала, которая лишь стохастически связана с возможным изменением информативного параметра сигнала на входе обнаружителя. Например, можно регистрировать изменение уровня шума, спектра, длительности, ожидаемого момента появления истинного сигнала, поляризации и т.д. и использовать это для установления различия между истинным и помеховым сигналом. При этом заранее неизвестно, с чем конкретно связано изменение данных неинформативных параметров.
Независимо от типа индикатора его функционирование можно описать условной вероятностью перехода из rk в rk+1 состояние:

где Р(Pr=1), Р(Pr=0) - соответственно вероятности наличия и отсутствия изменения регистрируемого неинформативного параметра на входе индикатора; P(rk+1/rk) - вероятности сохранения или изменения выходного сигнала индикатора при наличии или отсутствии изменения регистрируемого неинформативного параметра на входе индикатора соответственно.
Если индикатор неинформативного параметра безынерционный, то можно считать, что в момент k изменения сигнала на выходе индикатора изменение информативного параметра сигнала на входе оптимального обнаружителя происходит с вероятностью Р=1, при этом новое значение порога определяется как

где АN=1-p(NΔ); p(NΔ) - априорная вероятность момента обнаружения на N-ом шаге.
Сравнивая значения порогов (1) и (3) с учетом соотношения (2) и равномерности априорного распределения момента обнаружения, можно сделать вывод о том, что использование информации с выхода безынерционных индикаторов неинформативных параметров сигнала позволяет сократить время обнаружения изменения информативных параметров сигнала при заданной достоверности обнаружения в условиях помех вследствие снижения уровня порога.
На чертеже изображена схема, поясняющая принцип работы заявленного способа управления порогом в оптимальном обнаружителе. В ней представлены:
- оптимальный приемник и решающее устройство (РУ), в совокупности образующие оптимальный обнаружитель; 1, 2.
- устройство формирования порога (УФП); 3
- индикаторы неинформативных параметров сигнала (ИНПС). 4
Согласно схеме, оптимальный приемник на основе обработки входного сигнала с дискретной выборкой Х=Х(λ) в момент времени tN, равный интервалу наблюдения Т=NΔ, где Δ - интервал времени между шагами, N - число наблюдений в серии, формирует апостериорную плотность вероятности рps, описываемую формулой Байеса:
pps(λ)=kppr(λ)(L(λ),
где ppr(λ) - априорная плотность вероятности информативного параметра λ;
L(λ) - функция правдоподобия.
Апостериорная плотность вероятности pps(λ) в РУ сравнивается с порогом hn, который определяется в УФП в соответствии с формулой (1). В случае изменения сигнала на выходе ИНПС в момент времени tn<T апостериорная плотность вероятности pps(λ) сравнивается с новым порогом hN, определяемым в УФП по формуле (3). После принятия решения текущая серия наблюдений прекращается и происходит переход к следующей серии наблюдений ранее окончания интервала наблюдения текущей серии.
Принцип работы заявленного способа поясняется следующим примером.
Пример. Пусть имеется обнаружитель радиолокационного сигнала, в котором с порогом сравнивается апостериорная плотность вероятности изменения амплитуды отраженного от летательного аппарата сигнала. При этом амплитуда является информативным параметром. В качестве индикатора неинформативного параметра сигнала используется измеритель мощности сигнала. Рассматриваются два случая:
1. Постановка маскирующей помехи.
2. Интенсивный маневр летательного аппарата.
В первом случае амплитуда сигнала на входе обнаружителя скачкообразно увеличится. Одновременно на увеличение мощности (при постановке маскирующей помехи мощность помехового сигнала больше мощности сигнала от летательного аппарата) среагирует измеритель мощности сигнала, сигнал на выходе которого изменится с "0" на "1". По этому сигналу устанавливается новая величина порога, причем значительно раньше окончания наблюдения.
Во втором случае из-за изменения ракурса летательного аппарата также возможно скачкообразное увеличение мощности отраженного от него сигнала. Измеритель мощности сигнала среагирует и на это изменение мощности, т.е. произойдет ложное срабатывание индикатора неинформативного параметра. По сигналу с выхода индикатора неинформативного параметра устанавливается новая величина порога, в данном случае отличная от оптимального значения. Данное обстоятельство кратковременно приведет к незначительному уменьшению вероятности правильного обнаружения до конца наблюдения, что существенно не повлияет на работу обнаружителя, т.к. изменение амплитуды сигнала не связано с постановкой помех. По окончании наблюдения величина порога снова устанавливается оптимальной. Таким образом, применение заявленного способа управления порогом в первом случае значительно сокращает задержку в обнаружении истинного сигнала, а во втором, несмотря на ложное срабатывание индикатора неинформативного параметра сигнала, не ухудшает работу обнаружителя. Кроме того, применение нескольких индикаторов неинформативных параметров сигналов позволяет максимально снизить потери при ложном срабатывании каждого.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПОРОГОМ В ОПТИМАЛЬНОМ ОБНАРУЖИТЕЛЕ | 2007 |
|
RU2388143C2 |
| Способ формирования порога решающего устройства на основе нейрорегулятора | 2020 |
|
RU2731332C1 |
| Способ комплексирования информации радиолокационной станции и радиолокационных головок самонаведения ракет, пущенных носителем по воздушной цели при воздействии уводящих по дальности и скорости помех | 2021 |
|
RU2765145C1 |
| Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех | 2020 |
|
RU2764781C1 |
| Способ сопровождения в радиолокационной станции воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех | 2019 |
|
RU2713635C1 |
| Способ распознавания функционального назначения летательных аппаратов пары по принципу "ведущий-ведомый" | 2019 |
|
RU2726869C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ АЛГОРИТМА СИГМА-ТОЧЕЧНОГО ФИЛЬТРА КАЛМАНА | 2024 |
|
RU2840100C1 |
| Способ распознавания варианта наведения подвижного объекта на один из летательных аппаратов группы | 2019 |
|
RU2713212C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ И АДАПТИВНОГО УПРАВЛЕНИЯ РАСПРЕДЕЛЕННОЙ СИСТЕМОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2312389C1 |
| Способ комплексирования информации при определении направления беспилотного летательного аппарата на воздушный объект и величины предполагаемого промаха | 2022 |
|
RU2794733C1 |
Изобретение относится к области управления свойствами различных процессов, в частности управлению оптимальными обнаружителями сигналов, к способам определения и установки величины порога обнаружения. Достигаемый технический результат - сокращение времени обнаружения изменения информативных параметров сигналов при заданной достоверности обнаружения в условиях помех. Способ управления порогом обнаружения в оптимальном обнаружителе состоит в том, что на интервале наблюдения регистрируют изменение сигналов на выходе безынерционных индикаторов неинформативных параметров входного сигнала, которые стохастически связаны с изменением его информативных параметров, устанавливают новую величину порога обнаружения в момент регистрации указанных изменений. 1 ил.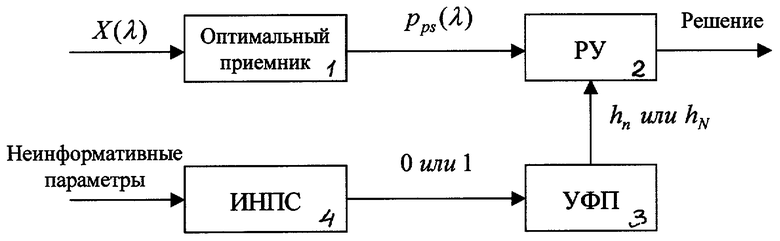
Способ управления порогом обнаружения в оптимальном обнаружителе, согласно которому на интервале наблюдения регистрируют изменение сигналов на выходе безынерционных индикаторов неинформативных параметров входного сигнала, которые стохастически связаны с изменением его информативных параметров, отличающийся тем, что устанавливают новую величину порога обнаружения в момент регистрации указанных изменений.
| RU 99125618 А, 27.09.2001 | |||
| 0 |
|
SU157391A1 | |
| Адаптивное пороговое устройство | 1977 |
|
SU617851A1 |
| Пороговый обнаружитель | 1984 |
|
SU1290541A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 6647252 B2, 11.11.2003 | |||
| Указатель вылета грузовой подвески стрелового крана | 1987 |
|
SU1437343A1 |
| Радиоприемные устройства | |||
| / Под ред | |||
| ЖУКОВСКОГО А.П | |||
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |

