Изобретение относится к способам обнаружения маневра цели радиотехническими системами, в частности радиолокационными системами сопровождения воздушных целей, и может быть использовано в бортовых и наземных РЛС.
Известен способ обнаружения маневра, основанный на автоматическом устранении расхождения следящего фильтра (см., например, В.И.Меркулов, В.Н.Лепин. Авиационные системы радиоуправления. Ч.1. - М.: Радио и связь, 1996 - 396 с: ил. стр.302), реализованный в устройстве, содержащем дискретный фильтр Калмана, усилитель, умножитель, устройство выбора максимума и логическую схему сравнения.
Недостатком способа является низкая помехоустойчивость к воздействию уводящих помех, имитирующих маневр цели.
Наиболее близким по своей сущности к предлагаемому способу является способ обнаружения маневра воздушной цели на основе анализа обновляющей последовательности (см. А.Фарина, Ф.Студер. Цифровая обработка радиолокационной информации. Сопровождение целей. - М: Радио и связь. 1993, с 224). Обновляющую последовательность обрабатывают набором низкочастотных фильтров, настроенных на маневр определенного типа. Наибольший по уровню сигнал будет на выходе фильтра, согласованного с обновляющей последовательностью. Если при этом будет превышен порог, то принимают решение о наличии маневра цели с характеристиками, соответствующими настройке согласованного фильтра.
Недостатком способа, принятого за прототип, является невозможность различения уводящих помех и маневров цели из-за отсутствия обнаружителя уводящих помех.
Техническим результатом изобретения является повышение помехоустойчивости обнаружителя маневра воздушной цели.
Сущность изобретения заключается в том, что в известном способе обнаружения маневра цели на основе анализа обновляющей последовательности отслеживаемой координаты цели, которая обрабатывается набором низкочастотных фильтров, настроенных на определенный тип маневра цели, дополнительно сигнал с выхода обнаружителя сравнивают по правилу логического умножения с сигналом, пропорциональным предельно возможной перегрузке цели для ее скорости и высоты, поступающих от измерителей скорости и высоты. При наличии информации о начале маневра от обнаружителя и превышении сигналом с выхода схемы нечеткого управления порога принимают решение о маневре и изменяют алгоритм оценивания калмановского фильтра, в случае, если одно или оба условия не выполняются, считают, что действует уводящая помеха или сигнал обнаружителя отсутствует, и используют фильтр сопровождения прямолинейно движущейся цели.
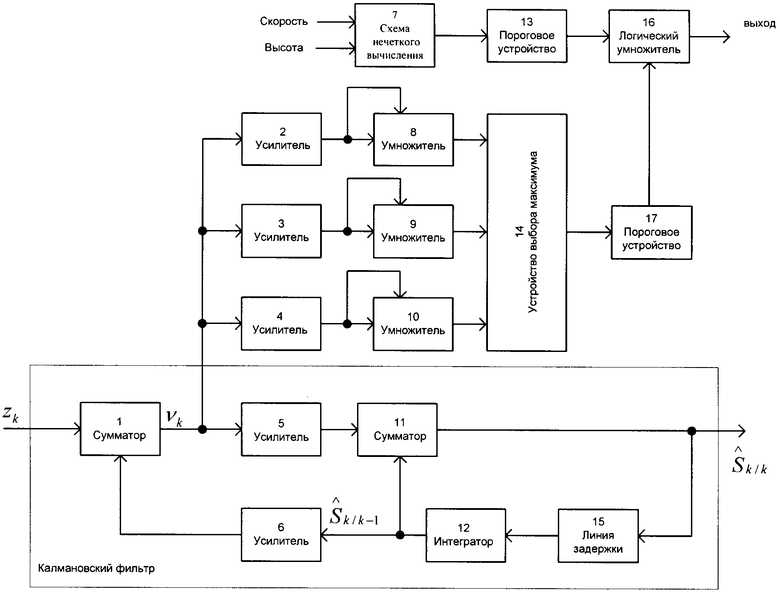
На чертеже приведена функциональная схема устройства, реализующего способ помехозащищенного обнаружения маневра.
Устройство состоит из сумматора 1, на вход которого подается сигнал наблюдения и к выходу которого параллельно подключены усилитель 5 и усилители видов маневра 2, 3, 4, выход усилителя 5 соединен с первым входом сумматора 11, выход усилителя вида маневра 2 соединен с первым и вторым входами умножителя 8, выход которого соединен с первым входом устройства выбора максимума 14, выход усилителя вида маневра 3 соединен с первым и вторым входами умножителя 9, выход которого соединен со вторым входом устройства выбора максимума 14, выход усилителя вида маневра 4 соединен с первым и вторым входами умножителя 10, выход которого соединен с третьим входом устройства выбора максимума 14, выход устройства выбора максимума 14 соединен с входом порогового устройства 17, выход которого соединен со вторым входом логического умножителя 16, выход сумматора 11 соединен с входом линии задержки 15, выход линии задержки 15 соединен со входом интегратора 12, выход которого соединен со вторым входом сумматора 11 и входом усилителя 6, выход которого подключен ко второму входу сумматора 1, на первый вход логического умножителя 16 поступает сигнал с выхода порогового устройства 13, вход которого соединен с выходом схемы нечеткого вычисления 7, на первый вход схемы нечеткого вычисления 7 поступает сигнал скорости цели, на второй вход поступает сигнал высоты цели, признак маневра цели снимают с выхода логического умножителя 16.
Устройство помехозащищенного обнаружения маневра работает следующим образом.
На первый вход сумматора 1 подается входной дискретный сигнал, представляющий собой напряжение, пропорциональное дальности до цели, со временем дискретизации Тп. Обновление входных сигналов осуществляется через время Тп, на это же время сигнал задерживается в линии задержки. В импульсной РЛС это время равно периоду повторения импульсов. Сигнал рассогласования на выходе сумматора 1 формируется путем сложения входной величины координаты цели и предсказанной, полученной путем усиления в усилителе 5 с последующей задержкой на время Тп в линии задержки 15, интегрированием и усилением в усилителе 6. Сигнал рассогласования поступает на входы усилителей типа маневров 2, 3, 4, каждый из которых согласован с определенным типом маневра. Устройство выбора максимума 14 определяет максимальный сигнал и подает его на вход порогового устройства 17. При превышении сигналом порога он поступает на второй вход логического умножителя 16. На вход схемы нечеткого вычисления 7 поступают сигналы, пропорциональные скорости и высоте цели, по значениям которых определяется предельно возможная перегрузка цели для ее скорости и высоты. Сигнал, величина которого соответствует предельной перегрузке цели для ее скорости и высоты, поступает с выхода схемы нечеткого вычисления на вход порогового устройства 13, величина порога которого выбирается по наименьшей интенсивности маневров, на которые настроены усилители типа маневра 2, 3, 4, на выходе порогового устройства 13 принимается решение о возможности маневра при данных значениях скорости и высоты цели. Схема нечеткого вычисления 7 основана на создании аппроксимирующей модели и представляет собой адаптивную нейронечеткую сеть ANFIS (Adaptive Neuro-Fuzzy Inference System), реализованную на базе нейронечеткого микроконтроллера. С выхода схемы нечеткого вычисления 7, через пороговое устройство 13, сигнал подается на первый вход логического умножителя 16, на выходе которого при наличии сигналов на обоих его входах принимается решение о маневре и изменяют алгоритм оценивания калмановского фильтра в случае, если одно или оба условия не выполняются, считают, что действует уводящая помеха или сигнал обнаружителя отсутствует и используют фильтр сопровождения прямолинейно движущейся цели.
Схема нечеткого вычисления осуществляет аппроксимацию зависимости интенсивности маневра цели, в качестве которой принята предельная возможная перегрузка цели, от высоты и скорости полета (см., например, Зарубежное военное обозрение. Ежемесячный иллюстрированный военный журнал Министерства обороны России. №1, 1981 г., стр.48.), путем предварительного обучения (см. Круглов В.В., Борисов В.В. Искусственные нейронные сети. Теория и практика. - М.: Горячая линия - Телеком, 2001. - 382 с: ил., стр.285) и реализуется на базе 16-разрядного микроконтроллера Motorola 68НС12, поддерживающего группу дополнительных команд для реализации "нечеткой логики".
Таким образом, предложенный способ помехозащищенного обнаружения маневра и устройство для его реализации позволяют эффективно различать действие уводящей помехи по одной координате цели и изменение координаты цели за счет маневрирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОМЕХОЗАЩИЩЕННОГО ОБНАРУЖЕНИЯ МАНЁВРА ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2235343C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕЙСЯ ЦЕЛИ С РАЗЛИЧЕНИЕМ СКОРОСТНЫХ И МАНЕВРЕННЫХ ХАРАКТЕРИСТИК | 2015 |
|
RU2619056C2 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩЕЙ ЦЕЛИ | 2004 |
|
RU2292061C2 |
| ТРЕХМЕРНЫЙ АДАПТИВНЫЙ α-β ФИЛЬТР | 2016 |
|
RU2631766C1 |
| СЛЕДЯЩИЙ РАДИОЛОКАЦИОННЫЙ ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ С ЗАЩИТОЙ ОТ УВОДЯЩИХ ПОМЕХ | 2000 |
|
RU2178895C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ РАКЕТОЙ | 1997 |
|
RU2114373C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции при воздействии имитирующих помех | 2020 |
|
RU2735314C1 |
| Способ всеракурсного распознавания в радиолокационной станции типового состава групповой воздушной цели при различных условиях полета и воздействии уводящих по скорости помех на основе калмановской фильтрации и нейронной сети | 2023 |
|
RU2816189C1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| Способ сопровождения в радиолокационной станции воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех | 2019 |
|
RU2713635C1 |
Изобретение относится к обнаружителям маневра воздушной цели радиолокационными системами сопровождения. Достигаемый технический результат заключается в повышении помехоустойчивости обнаружителя маневра цели. Сущность заявленного способа заключается в том, что обнаруживают маневр цели на основе анализа обновляющей последовательности отслеживаемой координаты цели, а именно дальности, которая обрабатывается набором низкочастотных фильтров, настроенных на определенный тип маневра цели, и по результатам сравнения выходных сигналов этих фильтров определяют тип маневра, выходной сигнал обнаружителя маневра по дальности сравнивают по правилу логического умножения с сигналом, пропорциональным предельно возможной перегрузке цели для ее скорости и высоты, по результатам сравнения принимают решение о маневре и изменяют алгоритм оценивания калмановского фильтра или считают, что действует уводящая помеха или сигнал обнаружителя отсутствует, и используют фильтр сопровождения прямолинейно движущейся цели. 1 ил.
Способ помехозащищенного обнаружения маневра воздушной цели, заключающийся в том, что обнаруживают маневр цели на основе анализа обновляющей последовательности отслеживаемой координаты цели, которая обрабатывается набором низкочастотных фильтров, настроенных на определенный тип маневра цели, отличающийся тем, что сигнал с выхода обнаружителя сравнивают по правилу логического умножения с сигналом, пропорциональным предельно возможной перегрузке цели для ее скорости и высоты, поступающих от измерителей скорости и высоты, при наличии информации о начале маневра от обнаружителя и превышении сигналом с выхода схемы нечеткого вычисления, предназначенной для осуществления аппроксимации зависимости интенсивности маневра цели от предельно возможной перегрузки цели для ее высоты и скорости, порога - принимают решение о маневре и изменяют алгоритм оценивания калмановского фильтра, в случае, если одно или оба условия не выполняются, считают, что действует уводящая помеха или сигнал обнаружителя отсутствует, и используют фильтр сопровождения прямолинейно движущейся цели.
| ФАРИНА А., СТУДЕР Ф | |||
| Цифровая обработка радиолокационной информации | |||
| Сопровождение целей | |||
| - М.: Радио и связь, 1993, с.224 | |||
| СПОСОБ ПОМЕХОЗАЩИЩЕННОГО ОБНАРУЖЕНИЯ МАНЁВРА ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2235343C2 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ СИТУАЦИЙ | 2000 |
|
RU2198426C2 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩЕЙ ЦЕЛИ | 2004 |
|
RU2292061C2 |
| US 3818196 А, 18.06.1984 | |||
| WO 2008065194 A1, 05.06.2008 | |||
| US 2006238411 A1, 26.10.2006 | |||
| Гербицидный состав | 1985 |
|
SU1577682A3 |

