Изобретение относится к радиотехнике, в частности к способам и устройствам временной синхронизации для систем связи с широкополосными сигналами, и может быть использовано в сотовых системах радиосвязи при определении местоположения мобильных станций.
Система слежения за временной задержкой сигнала используется в любой цифровой системе связи. Осуществление постоянной временной подстройки приемника необходимо в силу неидеальности часов приемника и передатчика. Кроме того, в системах подвижной связи расстояние между приемником и передатчиком, а следовательно, задержка сигнала изменяется в силу перемещения мобильной станции.
В ряде задач обработки сигналов в многолучевых нестационарных каналах необходимо определять задержку прямого луча.
Так, для определения местоположения подвижного объекта широко применяются методы, основанные на измерении расстояния между точками излучения и приема сигнала путем определения задержки его распространения между ними. Такие методы описаны, например, в работах [1. Сосулин Ю.Г. Теоретические основы радиолокации и радионавигации. Москва, "Радио и связь", 1992], [2. James Caffery, Gordon L. Stuber, Subscriber Location in CDMA Cellular Networks, IEEE Trans. Veh. Technol., vol. 47, pp. 406-415, May, 1998].
Оценку задержки сигнала могут выполнять устройства слежения за задержкой на основе временных дискриминаторов, описанные в упомянутых выше работах [1. Сосулин Ю.Г. Теоретические основы радиолокации и радионавигации. Москва, "Радио и связь", 1992], [2. James Caffery, Gordon L. Stuber, Subscriber Location in CDMA Cellular Networks, IEEE Trans. Veh. Technol., vol. 47, pp. 406-415, May, 1998].
Если все компоненты многолучевого сигнала разрешимы (сдвинуты относительно друг друга более чем на чип расширяющей ПСП), то дисперсия оценки временной задержки сигнала определяется отношением энергии сигнала к спектральной мощности шума [3. В.И.Тихонов Оптимальный прием сигналов. Москва, "Радио и связь", 1983].
При наличии неразрешимых компонент (сигналы сдвинуты относительно друг друга менее чем на чип расширяющей ПСП) возникает ошибка многолучевости и оценка временной задержки первой компоненты многолучевого сигнала смещается [2. James Caffery, Gordon L. Stuber, Subscriber Location in CDMA Cellular Networks, IEEE Trans. Veh. Technol., vol. 47, pp. 406-415, May, 1998].
Чип ПСП - это длительность одного элементарного временного интервала псевдослучайной последовательности.
Согласно рекомендациям ITU-R для IMT-2000 [4. Recommendation ITU-R M.1225 Guidelines for evaluation of radio transmission technologies for IMT-2000] лучи могут находиться на нескольких смежных временных позициях области неопределенности.
Корреляционная функция многолучевого сигнала является суммой корреляционных функций сигналов лучей. При фединге амплитуды и фазы компонент многолучевого сигнала меняются и, следовательно, меняется форма суммарной корреляционной функции.
Приближенно корреляционную функцию принятого сигнала (сигнал ограничен по полосе) можно описать следующей формулой [5. Andrew J. Viterbi. CDMA Principles of Spread Spectrum Communication. Addison - Wesly Publishing Company, 1995, стр. 43]:

где К(τ) - корреляционная функция принятого сигнала, Тc - длительность чипа ПСП.
На фиг. 1 показаны модули корреляционных функций двух сигналов лучей (К1, К2) и их суммарная корреляционная функция (К).
За нулевую точку отсчета принят максимум первого луча. Временной сдвиг нормирован к периоду дискретизации сигнала. Максимальные значения нормированных корреляционных функций компонент многолучевого сигнала равны 1 и 0,8. Относительный сдвиг компонент многолучевого сигнала равен 7/8 чипа ПСП.
Для определения местоположения подвижного объекта необходимо определить временную задержку прямого луча сигнала. Как видно из фиг. 1, максимум суммарный корреляционной функции сдвинут на 3/8 чипа относительно максимума первого сигнала. Устройство слежения за задержкой настроится на максимум корреляционной функции и ошибка многолучевости в этом случае составит 3/8 чипа.
Рассмотрим пример. В соответствии с рекомендациями ITU-R для IMT-2000 [4. Recommendation ITU-R M.1225 Guidelines for evaluation of radio transmission technologies for IMT-2000] примем, что сдвиг между первыми двумя лучами равен 300 наносекундам. Следовательно, ошибка многолучевости может превысить 150 наносекунд. В этом случае ошибка определения расстояния между точками излучения и приема сигнала может превысить 45 метров.
Известны различные способы определения задержки прямого луча при приеме многолучевого сигнала и устройства для их реализации, например способ, описанный в [6, патент США №5414729 Pseudorandom noise ranging receiver which compensates for multipath distortion by making use of multiple correlator time delay spacing, Fenton; Patrick, 1995].
В этом способе измеряют корреляционную функцию принимаемого многолучевого и опорного сигналов. На основе полученных значений корреляционной функции многолучевого сигнала составляется система линейных уравнений, в которой неизвестными величинами являются параметры многолучевого сигнала. Решения системы уравнений определяют задержки компонент многолучевого сигнала.
Устройство, реализующее рассмотренный способ, состоит из корреляторов со сдвинутыми менее чем на чип относительно друг друга опорными сигналами. Начальный сдвиг опорных сигналов корреляторов выбирается таким образом, чтобы корреляционный пик перекрывался выходными значениями корреляторов. Полученные выходные значения корреляторов поступают на вход устройства оценки параметров многолучевости. В этом устройстве посредством решения системы уравнений определяются задержки компонент многолучевого сигнала.
Недостатком этого решения является то, что для его применения необходимо знать число компонент многолучевого сигнала. На практике число компонент многолучевого сигнала часто неизвестно. Оно зависит от среды распространения сигнала и меняется при движении объекта. Поэтому применение рассматриваемого способа и устройства при неизвестном числе компонент многолучевого сигнала малоэффективно.
Известен другой способ, описанный в патенте [7, патенте US № 5854815. Lennen, Gary R. Code phase signal multipath compensation, 1998].
В способе, приведенном в патенте [7. US № 5854815. Lennen, Gary R. Code phase signal multipath compensation, 1998] измеряют корреляционную функцию многолучевого и опорного сигналов, которая затем сравнивается с опорной корреляционной функцией однолучевого сигнала. Начала обеих корреляционных функций совмещают. По взаимному смещению этих функций определяют ошибку многолучевости. Вид функции, определяющей ошибку многолучевости по величинам сдвигов между измеренной и опорной корреляционными функциями, определяют экспериментально. Оценка задержки первого луча равна разности оценки задержки многолучевого сигнала (максимума корреляционной функции многолучевого сигнала) и ошибки многолучевости.
Недостатком способа является то, что для его применения необходимо экспериментально определить вид функции ошибки многолучевости. На практике вид функции ошибки многолучевости зависит от условий распространения сигналов и меняется при движении объекта. Поэтому применение рассматриваемого способа малоэффективно.
Недостатком этого способа является также то, что в шумах достоверно определить временное положение начала корреляционной функции многолучевого сигнала не представляется возможным. Ошибка определения временного положения начала корреляционной функции приводит к ошибке оценки задержки первого луча.
Наиболее близким техническим решением к заявляемому изобретению, является изобретение по патенту US № 5815539 [8, патент US № 5815539. Lennen, Gary R. Signal timing synchronizer, 1998].
В способе, описанном в патенте US № 5815539, измеряют корреляционную функцию многолучевого и опорного сигналов. Затем в трех точках определяются сдвиги между измеренной корреляционной функцией и опорной корреляционной функцией однолучевого сигнала, полученного экспериментально. При этом начала обеих корреляционных функций совмещают. Первая и третья точки симметричны (противоположны) относительно максимума корреляционной функции многолучевого сигнала и находятся на уровне 0,6 от уровня максимума этой функции. Третий сдвиг определяется сдвигом максимумов этих функций. Ошибка многолучевости определяется экспериментально полученной функцией от вычисленных сдвигов. Оценка задержки первого луча равна разности оценки задержки многолучевого сигнала (максимума корреляционной функции многолучевого сигнала) и ошибки многолучевости.
Способ-прототип можно описать следующим образом.
- Определяют корреляционную функцию между принимаемым многолучевым сигналом и опорным сигналом.
- Определяют корреляционную функцию между однолучевым сигналом и опорным сигналом.
- Определяют сдвиги (в трех точках) между корреляционной функцией многолучевого сигнала и корреляционной функцией однолучевого сигнала.
- Определяют ошибку многолучевости, используя сдвиги между корреляционной функцией многолучевого сигнала и корреляционной функцией однолучевого сигнала.
- Величину временной задержки первого луча многолучевого сигнала принимают равной разности оценки задержки многолучевого сигнала (максимума корреляционной функции многолучевого и опорного сигналов) и ошибки многолучевости.
Для реализации способа прототипа используется устройство, блок-схема которого показана на фиг. 2.
На фиг. 2 устройство содержит корреляционный приемник 1, генератор тактовых импульсов 9, генератор ПСП 10, сканирующие корреляторы 11. В состав корреляционного приемника 1 входят линейный тракт приемника 2 с антенной, формирователь квадратурного сигнала 3, опорный генератор 4, первый генератор тактовых импульсов 6, генератор ПСП 7, корреляторы 5 и микропроцессор 8. Выход линейного тракта приемника 2 соединен с первым (сигнальным) входом формирователя квадратурного сигнала 3, второй вход которого является опорным и соединен с выходом опорного генератора 4. Первый и второй выходы формирователя квадратурного сигнала 3, которые являются соответственно выходами синфазного и квадратурного сигналов, соединены с соответствующими первым и вторым входами корреляторов 5, а также являются соответственно первым и вторым выходами приемника 1 и соединены с первым и вторым входами сканирующих корреляторов 11. Третий вход корреляторов 5 соединен с опорным выходом генератора ПСП 7. Третий вход сканирующих корреляторов 11 соединен с опорным выходом генератора ПСП 10. Выход корреляторов 5, на котором формируются значения корреляционной функции между принимаемым сигналом и опорным сигналом, соединен с первым входом микропроцессора 8. Выход сканирующих корреляторов 11, на котором формируются значения корреляционной функции между принимаемым многолучевым сигналом и опорным сигналом, соединен со вторым входом микропроцессора 8. Второй вход опорного генератора 4, который является входом управления состояния, соединен с первым выходом микропроцессора 8. Опорный выход опорного генератора 4 соединен также с опорными входом первого генератора тактовых импульсов 6, является третьим выходом приемника 1 и соединен с опорным входом генератора тактовых импульсов 9. Второй вход первого генератора тактовых импульсов 6, который является входом управления, соединен со вторым выходом микропроцессора 8. Второй вход второго генератора тактовых импульсов 9, который является входом управления, соединен с четвертым выходом микропроцессора 8, который является четвертым выходом приемника 1. Выход генератора тактовых импульсов 6 соединен с тактовым входом генератора ПСП 7, третий (управляющий) вход которого соединен с третьим выходом микропроцессора 8. Выход генератора тактовых импульсов 9 соединен с тактовым входом генератора ПСП 10, второй (управляющий) вход которого соединен с пятым выходом микропроцессора 8, который является пятым выходом приемника 1. Шестой выход микропроцессора 8 является выходом скорректированной оценки задержки многолучевого сигнала и выходом устройства.
Работает устройство следующим образом. Сигнал из антенны через линейный тракт приемника 2 поступает на формирователь квадратурного сигнала 3, на опорный вход которого поступает сигнал с опорного генератора 4. Формирователь квадратурного сигнала 3 формирует на видеочастоте синфазную и квадратурную составляющие сигнала. Сформированные синфазная и квадратурная составляющие сигнала поступают на входы корреляторов 5. Корреляторы вычисляют значения корреляционной функции между принимаемым сигналом и опорным сигналом, поступающим с генератора ПСП 7. В приемнике микропроцессор 8 синхронизирует работу опорного генератора 4, первого генератора тактовых импульсов 6 и первого генератора ПСП 7, формирует оценку задержки сигнала.
Синфазная и квадратурная составляющие сигнала с выходов формирователя квадратурного сигнала 3 поступают также на входы сканирующих корреляторов 11. Сканирующие корреляторы 11 вычисляют значения корреляционной функции между принимаемым многолучевым сигналом и опорным сигналом, поступающим с генератора ПСП 10.
Микропроцессор 8 также управляет работой второго генератора тактовых импульсов 9 и второго генератора ПСП 10. При сканировании выполняется сдвиг опорного сигнала генератора ПСП 10. Выходные значения сканирующих корреляторов поступают на микропроцессор 8.
Микропроцессор 8 в трех точках определяет сдвиги между измеренной корреляционной функцией и опорной корреляционной функцией однолучевого, полученного экспериментально сигнала. При этом начала обеих корреляционных функций совмещают. Первая и третья точки симметричны (противоположны) относительно максимума корреляционной функции многолучевого сигнала и находятся на уровне 0,6 уровня максимума этой функции. Третий сдвиг определяется сдвигом максимумов этих функций. Ошибка многолучевости определяется экспериментально полученной функцией от вычисленных сдвигов.
Микропроцессор 8 вычитает ошибку многолучевости из оценки задержки многолучевого сигнала. Скорректированная оценка задержки первого луча с выхода микропроцессора поступает на выход приемника 1.
Недостатком такого решения является то, что для его применения необходимо экспериментально определить опорный сигнал и вид функции ошибки многолучевости. На практике вид функции ошибки многолучевости зависит от условий распространения сигналов и меняется при движении объекта. Поэтому применение рассматриваемого способа и устройства малоэффективно.
Недостатком этого способа является также то, что в шумах достоверно определить временное положение начала корреляционной функции многолучевого и опорного сигналов не представляется возможным. Ошибка определения временного положения начала корреляционной функции приводит к ошибке оценки задержки первого луча.
Задача, которую решает предлагаемое изобретение, заключается в повышении точности определения задержки первого луча при приеме многолучевого сигнала.
Для решения этой задачи в способ определения задержки прямого луча при приеме многолучевого сигнала, заключающийся в том, что формируют корреляционную функцию принимаемого многолучевого сигнала и опорного сигнала, дополнительно введены следующие операции:
- периодически с периодом Т определяют временную задержку первого максимума корреляционной функции принимаемого многолучевого сигнала,
- запоминают N*K определенных подряд временных задержек первого максимума корреляционной функции принимаемого многолучевого сигнала, где N и К целые числа,
- разбивают их на К групп по N определенных подряд временных задержек сдвига корреляционной функции принимаемого многолучевого сигнала в каждой группе,
- в каждой группе определяют минимальное значение временной задержки первого максимума корреляционной функции принимаемого многолучевого сигнала,
- определяют среднюю величину определенных минимальных значений временной задержки первого максимума корреляционной функции принимаемого многолучевого сигнала, которую принимают за задержку прямого луча при приеме многолучевого сигнала.
Для решения той же задачи в устройство определения задержки прямого луча при приеме многолучевого сигнала, содержащее приемник, сканирующие корреляторы, генератор тактовых импульсов, генератор псевдослучайной последовательности, при этом первый и второй выходы приемника, которые являются выходами синфазного и квадратурного сигналов, соединены соответственно с первым и вторым входами сканирующих корреляторов, третий выход приемника, который является выходом опорных тактовых импульсов, соединен с первым входом генератора тактовых импульсов, второй вход генератора тактовых импульсов, который является входом управления, соединен с четвертым выходом приемника, выход генератора тактовых импульсов соединен со входом тактовых импульсов генератора псевдослучайной последовательности, управляющий вход которого соединен с пятым выходом приемника, третий вход сканирующих корреляторов, который является входом опорного сигнала, соединен с выходом генератора псевдослучайной последовательности, дополнительно введены: первое оперативное запоминающее устройство, блок определения задержки максимума корреляционной функции многолучевого сигнала, второе оперативное запоминающее устройство, блок управления, блок определения минимальной задержки максимума корреляционной функции многолучевого сигнала, блок определения среднего значения минимальной задержки максимума корреляционной функции многолучевого сигнала, причем четвертый вход сканирующих корреляторов, который является входом управления, соединен с седьмым выходом приемника, выход сканирующих корреляторов, который является выходом значений корреляционной функции принимаемого многолучевого и опорного сигналов, соединен с первым входом первого оперативного запоминающего устройства, второй вход которого является входом управления считыванием значений корреляционной функции из ОЗУ и соединен с первым выходом блока управления, выход первого оперативного запоминающего устройства соединен с первым входом блока определения задержки максимума корреляционной функции многолучевого сигнала, второй вход которого является входом управления и соединен со вторым выходом блока управления, выход блока определения задержки максимума корреляционной функции, который является выходом значения временной задержки первого максимума корреляционной функции многолучевого сигнала, соединен со входом второго оперативного запоминающего устройства, второй вход которого является управляющим и соединен с третьим выходом блока управления, выход второго оперативного запоминающего устройства соединен с первым входом блока определения минимальной задержки максимума корреляционной функции многолучевого сигнала, который является входом значений сдвига максимума корреляционной функции, второй вход блока определения минимальной задержки максимума корреляционной функции многолучевого сигнала является входом управления и соединен с четвертым выходом блока управления, выход блока определения минимальной задержки максимума корреляционной функции многолучевого сигнала, который является выходом значений минимальной задержки максимума корреляционной функции, соединен с первым входом блока определения среднего значения минимальной задержки максимума корреляционной функции, второй вход которого является входом управления и соединен с пятым выходом блока управления, выход блока определения среднего значения минимальной задержки максимума корреляционной функции является выходом устройства, кроме того, четвертый вход сканирующих корреляторов, который является входом управления интервалом накопления принимаемого сигнала, соединен с седьмым выходом приемника, выход генератора тактовых импульсов соединен с первым входом блока управления, второй вход которого соединен с шестым выходом приемника, который является выходом управления обработкой выходных сигналов сканирующих корреляторов.
Сопоставительный анализ способа определения задержки прямого луча при приеме многолучевого сигнала с прототипом показывает, что предлагаемое изобретение существенно отличается от прототипа, так как позволяет повысить точность определения задержки первого луча при приеме многолучевого сигнала.
Сопоставительный анализ заявляемого способа с другими техническими решениями в данной области техники не позволил выявить признаки, заявленные в отличительной части формулы изобретения. Следовательно, заявляемый способ определения задержки прямого луча при приеме многолучевого сигнала отвечает критериям "новизна", "техническое решение задачи", "существенные отличия" и обладает неочевидностью решения.
Сопоставительный анализ устройства определения задержки прямого луча при приеме многолучевого сигнала с прототипом показывает, что предлагаемое изобретение существенно отличается от прототипа, так как позволяет повысить точность определения задержки первого луча при приеме многолучевого сигнала.
Сопоставительный анализ заявляемого устройства с другими техническими решениями в данной области техники не позволил выявить признаки, заявленные в отличительной части формулы изобретения. Следовательно, заявляемое устройство определения задержки прямого луча при приеме многолучевого сигнала отвечает критериям "новизна", "техническое решение задачи", "существенные отличия" и обладает неочевидностью решения.
Графические материалы, поясняющие данное изобретение:
фиг. 1 - зависимость корреляционной функции двух компонент многолучевого сигнала и суммарной корреляционной функции от временного сдвига;
фиг. 2 - блок-схема устройства прототипа;
фиг. 3 - блок-схема предлагаемого устройства;
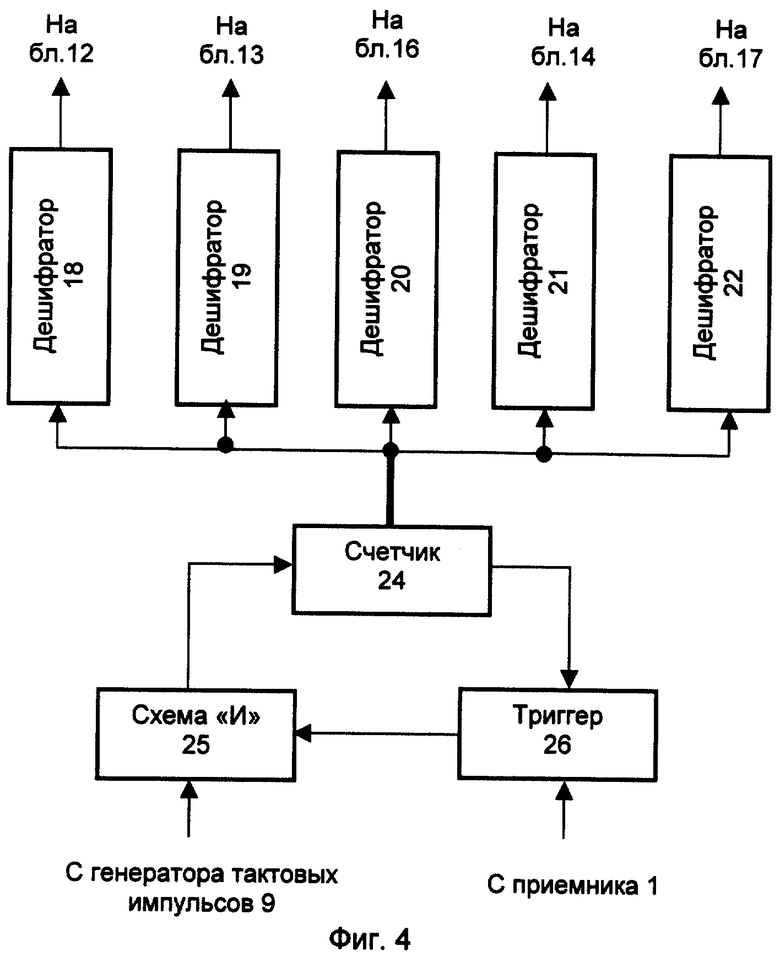
фиг. 4 - вариант выполнения блока управления.
Предлагаемый способ заключается в следующем.
Периодически с периодом Т выполняют следующие операции:
- формируют корреляционную функцию между принимаемым многолучевым и опорным сигналами;
- определяют временную задержку первого максимума корреляционной функции принимаемого многолучевого сигнала;
- запоминают N*K определенных подряд временных задержек первого максимума корреляционной функции принимаемого многолучевого сигнала, где N и К целые числа;
- разбивают их на К групп по N определенных подряд временных задержек сдвига корреляционной функции принимаемого многолучевого сигнала в каждой группе;
- в каждой группе определяют минимальное значение временной задержки первого максимума корреляционной функции принимаемого многолучевого сигнала;
- определяют среднюю величину определенных минимальных значений временной задержки первого максимума корреляционной функции принимаемого многолучевого сигнала, которую принимают за задержку прямого луча при приеме многолучевого сигнала.
Блок-схема устройства, реализующего заявляемый способ, представлена на фиг. 3. На фиг. 3 устройство изображено в составе стандартного корреляционного приемника.
Устройство содержит корреляционный приемник 1, выполненный так, как показано на фиг. 2 (устройство-прототип), генератор тактовых импульсов 9, генератор ПСП 10, сканирующие корреляторы 11, первое оперативное запоминающее устройство (ОЗУ) 12, блок определения задержки максимума корреляционной функции многолучевого сигнала 13, второе ОЗУ 14, блок управления 15, блок определения минимальной задержки максимума корреляционной функции многолучевого сигнала 16, блок определения среднего значения минимальной задержки максимума корреляционной функции многолучевого сигнала 17.
При этом первый и второй выходы приемника 1, которые являются выходами синфазного и квадратурного сигналов, соединены соответственно с первым и вторым входами сканирующих корреляторов 11. Третий выход приемника 1, который является выходом опорных тактовых импульсов, соединен с первым входом генератора тактовых импульсов 9. Второй вход генератора тактовых импульсов 9, который является входом управления, соединен с четвертым выходом приемника 1. Выход генератора тактовых импульсов 9 соединен со входом тактовых импульсов генератора ПСП 10, второй (управляющий) вход которого соединен с пятым выходом приемника 1, и первым входом блока управления 15, второй вход которого соединен с шестым выходом приемника 1, который является выходом управления обработкой выходных сигналов сканирующих корреляторов 11. Третий вход сканирующих корреляторов 11, который является входом опорного сигнала, соединен с выходом генератора ПСП 10. Четвертый вход сканирующих корреляторов 11, который является входом управления интервалом накопления принимаемого сигнала, соединен с седьмым выходом приемника 1. Выход сканирующих корреляторов 11, на котором формируются значения корреляционной функции принимаемого многолучевого и опорного сигналов, соединен с первым входом первого ОЗУ 12, второй вход которого является входом управления считывания значений корреляционной функции из ОЗУ и соединен с первым выходом блока управления 15. Выход ОЗУ 12 соединен с первым входом блока определения задержки максимума корреляционной функции 13, второй вход которого является входом управления и соединен со вторым выходом блока управления 15.
Выход блока определения задержки максимума корреляционной функции 13, на котором формируется временная задержка первого максимума корреляционной функции многолучевого сигнала, соединен со входом второго ОЗУ 14, второй вход которого является управляющим и соединен с третьим выходом блока управления 15. Выход второго ОЗУ 14 соединен с первым входом блока определения минимальной задержки максимума корреляционной функции многолучевого сигнала 16, который является входом значений сдвига максимума корреляционной функции. Второй вход блока определения минимальной задержки максимума корреляционной функции многолучевого сигнала 16 является входом управления и соединен с четвертым выходом блока управления 15. Выход блока определения минимальной задержки максимума корреляционной функции многолучевого сигнала 16, который является выходом значений минимальной задержки корреляционной функции, соединен с первым входом блока определения среднего значения минимальной задержки максимума корреляционной функции 17, второй вход которого является входом управления и соединен с пятым выходом блока управления 15. Выход блока определения среднего значения минимальной задержки максимума корреляционной функции 17 является выходом устройства.
Работает устройство следующим образом.
Приемник 1 осуществляет прием многолучевого сигнала. С приемника 1 на сканирующие корреляторы 11 поступают синфазная и квадратурная составляющие принимаемого сигнала. Опорный сигнал для сканирующих корреляторов 11 формирует генератор ПСП 10, управляемый приемником 1. При сканировании выполняется сдвиг опорного сигнала генератора ПСП 10. Тактовые импульсы на генератор ПСП 10 поступают с генератора тактовых импульсов 9, который формирует эти импульсы из опорных тактовых импульсов, поступающих с приемника 1. Управление генератором тактовых импульсов 9 осуществляется также приемником 1.
С приемника 1 на сканирующие корреляторы 11 также поступает управляющий сигнал, который определяет интервал накопления принимаемого сигнала в сканирующих корреляторах 11.
Сканирующие корреляторы 11 представляют собой параллельные корреляторы с опорными сигналами, сдвинутыми относительно друг друга менее чем на чип ПСП (псевдослучайной последовательности).
В приемнике 1 сигналы управления генератором тактовых импульсов 9, генератором ПСП 10, сигнал, определяющий интервал накопления принимаемого сигнала в сканирующих корреляторах 11, сигнал управления обработкой выходных сигналов сканирующих корреляторов 11 формируются микропроцессором 8. Все эти сигналы в совокупности обеспечивают формирование на выходе сканирующих корреляторов 11 значений корреляционной функции принимаемого и опорного сигналов. Микропроцессор 8 с описанными функциональными связями является типичным блоком цифровой техники и в качестве такого блока может быть использован любой из современных микропроцессоров цифровой обработки сигналов (DSP), например TMS 320Схх, Motorola 56xxx, Intel и т.п.
С периодом Т сканирующие корреляторы 11 формируют значения корреляционной функции принимаемого многолучевого и опорного сигналов. Значения этой функции (выходные значения сканирующих корреляторов 11) записываются в ОЗУ 12 и затем по сигналу с блока управления 15 считываются на блок определения задержки максимума корреляционной функции 13. В этом блоке 13 определяют временную задержку первого максимума корреляционной функции многолучевого сигнала.
Блок определения задержки максимума корреляционной функции 13 можно выполнить в виде трех регистров, схемы сравнения и счетчика. В первый регистр в исходном состоянии записывается нулевое значение. Во второй регистр записываются текущие значения корреляционной функции, считываемой из ОЗУ 12. Число, записанное в счетчике, равно числу значений корреляционной функции, считанных из ОЗУ 12. Схема сравнения сравнивает значения, записанные в регистры. Если текущее значение, записанное во второй регистр, больше, чем значение, записанное в первый, то значение корреляционной функции из второго регистра перезаписывается в первый, а значение счетчика записывается в третий регистр. Период дискретизации корреляционной функции равен периоду дискретизации входного сигнала. Поэтому номер максимального отсчета корреляционной функции является нормированным к периоду дискретизации входного сигнала сдвигом максимума корреляционной функции. Значения сдвига корреляционной функции с выхода третьего регистра поступают на выход блока определения задержки максимума корреляционной функции 13.
С блока определения задержки максимума корреляционной функции 13 значение задержки максимума корреляционной функции поступает на вход второго ОЗУ 14. После записи во второе ОЗУ 14 N*K значений сдвига максимума по команде блока управления 15 ОЗУ 14 последовательно подает записанные в него значения сдвига максимума на вход блока определения минимального значения задержки максимума корреляционной функции 16. В блоке определения минимального значения задержки максимума корреляционной функции 16 из N определенных подряд временных задержек первого максимума корреляционной функции определяют минимальную задержку, которая поступает на вход блока определения среднего значения минимальной задержки максимума корреляционной функции 17.
Блок определения минимальной задержки максимума корреляционной функции 16 можно выполнить в виде двух регистров и схемы сравнения. В первый регистр в исходном состоянии записывается максимально возможное значение задержки. Во второй регистр записывается текущее значение задержки. Схема сравнения сравнивает значения, записанные в регистры. Если текущее значение, записанное во второй регистр, меньше, чем значение, записанное в первый регистр, то текущее значение задержки перезаписывается в первый регистр. После обработки N-го значения задержки выходной сигнал первого регистра поступает на выход блока определения минимальной задержки максимума корреляционной функции 16, а затем в этот регистр записывается максимально возможное значение задержки.
Блок определения минимальной задержки максимума корреляционной функции 16 по команде блока управления 15 последовательно подает значения минимальных сдвигов на вход блока определения среднего значения минимальной задержки максимума корреляционной функции 17. В блоке 17 по K минимальным задержкам первого максимума определяют среднее значение минимальной задержки максимума корреляционной функции. Блок определения среднего значения минимальной задержки максимума корреляционной функции 17 можно выполнить в виде последовательно соединенных накопительного сумматора (цифрового интегратора) и делителя на К. Оценку временного сдвига первого сигнала многолучевого сигнала принимают равной среднему значению минимального сдвига.
Пример выполнения блока управления 15 представлен на фиг.4. Работает блок управления следующим образом.
С генератора тактовых импульсов 9 на схему "И" 25 поступают тактовые импульсы, а с приемника 1 на триггер 26 - команда начала обработки выходных сигналов сканирующих корреляторов 11. По этой команде триггер 26 устанавливается в "единичное" состояние и тактовые импульсы через схему "И" 25 поступают на счетчик 24. Из многоразрядного сигнала счетчика 24 пять дешифраторов 18-22 формируют управляющие сигналы для блоков предлагаемого устройства. После окончания интервала цикла обработки со счетчика 24 на триггер 26 поступает сигнал, который устанавливает его в "нулевое" состояние и тактовые импульсы на счетчик 24 не поступают до следующей команды запуска цикла обработки.
Таким образом, предлагаемый способ определения задержки прямого луча при приеме многолучевого сигнала по сравнению с известными техническими решениями в данной области техники позволяет получить более точное значение задержки прямого луча.


Изобретение относится к радиотехнике. Технический результат заключается в повышении точности определения задержки первого луча при приеме многолучевого сигнала. Сущность изобретения заключается в том, что по N*K реализациям корреляционных функций многолучевого и опорного сигналов определяют минимальное значение временной задержки первого максимума. Среднее значение величины минимального значения задержки максимума корреляционной функции принимают равной оценке временной задержки первого луча. 2 н.п. ф-лы, 4 ил.

| US 5815539, 29.09.1998 | |||
| СПОСОБ ПРИЕМА-ПЕРЕДАЧИ МНОГОЛУЧЕВЫХ СИГНАЛОВ (ВАРИАНТЫ) И УСТРОЙСТВО ПРИЕМА-ПЕРЕДАЧИ СИГНАЛОВ С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ (ВАРИАНТЫ) | 1998 |
|
RU2153776C2 |
| US 5414729, 09.05.1995 | |||
| US 5854815, 29.12.1998. | |||

