Изобретение относится к области радиотехники, в частности к способам приема многолучевого сигнала в системах связи с кодовым разделением каналов и может использоваться в приемных устройствах базовой и мобильной (абонентской) станций.
В системах связи с подвижными объектами каналы распространения сигнала между приемником и передатчиком данных являются многолучевыми и нестационарными. Временные задержки компонент многолучевого сигнала находятся в некоторой временной области неопределенности (области многолучевости). Эффективность систем связи во многом определяется способностью алгоритмов поиска, временной синхронизации и обработки данных обеспечить в многолучевых нестационарных каналах необходимое качество принимаемой информации.
Кодовое разделение каналов в системах связи осуществляется, например, с использованием кодовых расширяющих псевдослучайных последовательностей (ПСП) и может использоваться в приемных устройствах базовой и мобильной (абонентской) станций.
Интервал задержки между любыми двумя лучами в области многолучевости удобно измерять в чипах ПСП.
Чип ПСП - это длительность одного элементарного временного интервала псевдослучайной последовательности.
В системах связи с кодовым разделением каналов в условиях многолучевости для улучшения качества связи используют многолучевые (RAKE) приемники, в которых производят взвешенное суммирование выходных сигналов совокупности однолучевых приемников, настроенных на сигналы обнаруженных лучей.
Известен способ многолучевого приема, приведенный в патенте ЕР 1041725 A2 "RAKE receiver", H 04 B 1/707, October, 04, 2000.
Описанный в патенте способ заключается в следующем. Периодически производят поиск временных положений (задержек) сигналов лучей базовых станций, получая первоначальные оценки временных положений сигналов лучей. На каждом периоде поиска оценивают мощность максимальных лучей базовых станций и выбирают для сеанса связи базовую станцию с наибольшим по мощности лучом. Производят оценку временных задержек сигналов обнаруженных лучей выбранной базовой станции. В однолучевых приемниках для всех сигналов лучей выбранной базовой станции получают мягкие решения об информационных символах и объединяют эти мягкие решения путем их взвешенного суммирования.
Предложенный в данном патенте подход позволяет эффективно обеспечить прием и улучшить качество принимаемой информации за счет периодического анализа области многолучевости и использования для сеанса связи той базовой станции, сигнал которой имеет набольшую энергию.
Известен способ многолучевого приема, приведенный в патенте ЕР 0877493 A2 "Synchronization in a multipath spread spectrum communication receiver", H 04 B 1/707, November, 11, 1998.
Описанный в патенте способ заключается в следующем. Осуществляют прием многолучевого сигнала на две разнесенные в пространстве антенны. В области многолучевости в несколько этапов производят предварительный поиск сигналов лучей, отстоящих друг от друга на чип и более. На каждом этапе выделяют компоненту, которая имеет наибольший корреляционный отклик. Интервал анализа для каждой временной задержки при поиске сигналов лучей выбирают в зависимости от времени корреляции, которое оценивают по среднему периоду фединга. Для обнаруженных сигналов лучей, отстоящих друг от друга на чип и более, производят слежение за временной задержкой, получают мягкие решения об информационных символах и объединяют эти мягкие решения путем взвешенного суммирования.
Предложенный в данном патенте подход позволяет эффективно обеспечить прием информации, во-первых, за счет пространственного разнесения, во-вторых, за счет использования для обработки некоррелированных компонент многолучевого сигнала, разнесенных по времени на чип и более и, в-третьих, за счет использования адаптивного интервала анализа при поиске сигналов лучей.
Известен способ многолучевого приема, приведенный в патенте США № 5490165 "Demodulation Element Assignment in a System Capable of Receiving Multiple Signals", H 04 B 1/69, Feb.6, 1996.
Описанный способ заключается в следующем. Производят предварительный поиск временных положений (задержек) сигналов лучей, получая первоначальные оценки временных положений сигналов лучей. Для каждого обнаруженного луча выполняют процедуру слежения за временной задержкой сигнала и получают уточненную оценку временной задержки. В однолучевых приемниках для обнаруженных сигналов лучей с уточненной оценкой временной задержки получают мягкие решения об информационных символах и объединяют эти мягкие решения путем их взвешенного суммирования.
Известен способ приема многолучевого сигнала, приведенный в патенте РФ № 2168274.
Описанный способ заключается в следующем. Периодически производят предварительный поиск временных положений (задержек) сигналов лучей на интервале многолучевости, получая первоначальные оценки временных положений сигналов лучей.
Для каждого последующего периода поиска формируют область многолучевости, как интервал временных задержек относительно временного положения обнаруженного при начальном поиске сигнала с максимальным уровнем. Границы области многолучевости определяется характеристиками канала связи.
Для каждого сигнала луча производят оценку его временной задержки. Для сигналов лучей получают мягкие решения об информационных символах и объединяют их путем взвешенного суммирования.
Предложенный в данном патенте подход позволяет эффективно обеспечить прием информации в многолучевом сигнале путем адаптации к изменяющимся условиям распространения в канале связи, за счет периодического определения области многолучевости, периодического поиска и использования на каждом периоде обновленных лучей.
Недостатком предложенных подходов обработки сигнала в упомянутых патентах является то, что при проведении процедуры поиска сигналов лучей не учитывается влияние компонент многолучевого сигнала друг на друга. В результате этого возрастает вероятность ошибочного обнаружения сигналов лучей. Кроме того, не осуществляется оптимизация числа сигналов лучей, которые используют для получения мягких решений об информационных символах, что приводит к завышенным требованиям к аппаратурной реализации без увеличения качества выделяемой информации.
Наиболее близким к предлагаемому решению является способ приема многолучевых сигналов и устройство для его реализации, описанные в патенте РФ №2120180.
Описанный способ приема многолучевых сигналов прототипа заключается в следующем:
Определяют временную область многолучевости.
Периодически определяют число и временные задержки компонент многолучевого сигнала, для чего производят следующие операции:
- Проводят поиск сигнала в области многолучевости и определяют оценку поиска числа и временных задержек компонент многолучевого сигнала.
- Формируют обновленное число и временные задержки компонент многолучевого сигнала, для чего:
- формируют совокупность компонент, состоящую из компонент многолучевого сигнала предыдущего периода и максимальной по мощности компоненты поиска;
- из сформированной совокупности компонент исключают минимальную по мощности компоненту. Обновленные временные задержки компонент многолучевого сигнала равны временным задержкам компонент совокупности.
- Находят временные задержки компонент многолучевого сигнала текущего периода, уточняя обновленные временные задержки компонент многолучевого сигнала.
Формируют мягкие решения об информационных символах, используя найденные временные задержки компонент многолучевого сигнала.
Укрупненная структурная схема устройства для реализации способа прототипа приведена на фиг.2. Подробная структурная схема прототипа приведена на фиг.1.
На фиг.1 используются следующие обозначения:
1-1 - 1-L - приемники данных,
2-1 - 2-L - умножители,
3 - схема определения весовых коэффициентов,
4 - сумматор,
5 - решающая схема,
6-1 - 6-М - приемники кластера,
7-1 - 7-М - умножители,
8 - схема обнаружения и анализа кластера лучей,
9 - приемник поиска,
10 - коммутатор,
11 - блок управления.
На фиг.2 обозначено:
11 - блок управления,
12 - блок поиска,
13 - многоканальный приемник данных,
14 - схема объединения мягких решений,
15 - блок формирования мягких решений.
Укрупненная структурная схема устройства прототипа содержит блок поиска 12, который включает приемник поиска 9 и схему обнаружения и анализа кластера лучей 8, многоканальный приемник данных 13, содержащий L приемников данных 1-1 - 1-L и М - приемников кластера лучей 6-1 - 6-М и коммутатор 10, блок управления 11, и схему объединения мягких решений 14, в которую входят умножители 2-1 - 2-L, умножители 7-1 - 7-М, схема определения весовых коэффициентов 3, сумматор 4 и решающая схема 5.
При этом первый и второй входы блока поиска 12 и многоканального приемника данных 13 объединены и являются сигнальными входами устройства. Выход блока поиска 12, который является выходом оценки поиска числа и временных задержек компонент многолучевого сигнала, соединен с первым входом блока управления 11.
Первые выходы многоканального приемника данных 13, которые являются выходами корреляционных откликов символов совокупности компонент многолучевого сигнала предыдущего периода, соединены со вторыми входами блока управления 11.
Первый выход блока управления 11, который является управляющим выходом, соединен с третьим входом блока поиска 12.
Вторые выходы блока управления 11, которые являются выходами обновленного числа и временных задержек компонент многолучевого сигнала, соединены с третьими входами многоканального приемника данных 13.
Второй выход многоканального приемника данных 13, который является выходом корреляционных откликов символов компонент многолучевого сигнала с уточненными обновленными временными задержками, соединен со входом схемы объединения мягких решений 14. Многоканальный приемник данных 13 и схемы объединения мягких решений 14 объединены в блок формирования мягких решений 15, выход которого является выходом мягких решений устройства.
Устройство-прототип приема многолучевых сигналов, представленное на фиг.2, работает следующим образом.
Входной комплексный многолучевой сигнал, содержащий синфазную и квадратурную составляющие (СС и КВС), поступает на входы блока поиска 12 и на входы многоканального приемника данных 13, при этом каждый приемник данных обрабатывает сигнал отдельного луча. Сигналы с первого выхода многоканального приемника данных 13, представляющие собой корреляционные отклики символов компонент многолучевого сигнала с уточненными обновленными временными задержками, поступают на второй вход блока управления 11. Сигналы со второго выхода многоканального приемника данных 13, представляющие собой корреляционные отклики символов компонент многолучевого сигнала с уточненными обновленными временными задержками, поступают на вход схемы объединения мягких решений 14.
В схеме объединения мягких решений 14 корреляционные отклики компонент многолучевого сигнала с уточненными обновленными временными задержками многоканального приемника данных 13 умножаются на сформированные весовые коэффициенты таким образом, что большему по мощности сигналу соответствует больший коэффициент. Затем взвешенные выходные сигналы схем умножения суммируются, в результате чего формируется мягкое решение о принятом информационном сигнале.
Блок поиска 12 по управляющим сигналам с первого выхода блока 11 периодически анализирует область многолучевости, при этом на каждом периоде определяет число и временные задержки компонент многолучевого сигнала.
Максимальная по мощности компонента поиска поступает на вход блока управления 11, где сравнивается с минимальной по мощности компонентой многолучевого сигнала предыдущего периода, поступившей с многоканального приемника данных 13.
Если максимальная по мощности компонента поиска больше минимальной по мощности компоненты многолучевого сигнала предыдущего периода, то формируют совокупность компонент, состоящую из компонент многолучевого сигнала предыдущего периода и максимальной по мощности компоненты поиска. При этом из сформированной совокупности компонент исключают минимальную по мощности компоненту предыдущего периода. Таким образом формируется совокупность компонент многолучевого сигнала текущего периода с обновленными временными задержками, которые далее уточняются системой слежения за задержкой в многоканальном приемнике данных 13.
Способ поиска многолучевого сигнала прототипа по патенту РФ №2120180 заключается в следующем:
- Формируют комплексные корреляционные отклики пилот сигнала, определяя корреляцию входного сигнала с опорным сигналом, сдвинутым на дискрет времени поиска в пределах области многолучевости.
- Определяют значения решающей функции для заданных дискретных временных задержек области многолучевости, суммируя квадраты синфазной и квадратурной частей соответствующих комплексных корреляционных откликов пилот сигнала.
- Сравнивают значения сформированной решающей функции с заданным порогом h.
- Формируют оценки поиска временных задержек компонент многолучевого сигнала по превышению порога h.
Дискрет времени поиска выбирают, например, равным половине чипа ПСП.
Порог h выбирают пропорционально мощности шума.
Для реализации способа поиска в прототипе используется блок поиска 12, который включает приемник поиска 9 и схему обнаружения и анализа кластера лучей 8. Структурная схема блока поиска 12 представлена на фиг.3, где обозначено:
16-1 - 16-K - квадратурные корреляторы,
17 - генератор псевдослучайной последовательности (ПСП),
18 - схема формирования порога,
19 - схема управления,
20 - мультиплексор.
Блок поиска 12 содержит К квадратурных корреляторов 16-1 - 16-К, первые и вторые входы которых объединены с первым и вторым входами схемы формирования порога 18 и являются сигнальными входами устройства. Третий вход каждого квадратурного коррелятора 16-1 - 16-K является входом сигнала ПСП и соединен с соответствующим ему выходом генератора ПСП 17.
Четвертый вход каждого квадратурного коррелятора 16-1 - 16-K, который является входом управляющего сигнала, соединен с соответствующим ему первым выходом схемы управления 19. Второй выход схемы управления 19, который является выходом временных сдвигов генератора ПСП 17, соединен со входом генератора ПСП 17. Выход каждого квадратурного коррелятора 16-1 - 16-K, который является выходом значений решающих функций для заданных временных задержек области многолучевости, соединен с соответствующим входом мультиплексора 20.
Выход мультиплексора 20, который является выходом значений решающих функций из области многолучевости, соединен с третьим входом схемы обнаружения и анализа кластера лучей 8. Одновременно выход мультиплексора 20 и выходы схемы обнаружения и анализа кластера лучей 8 соединены со входом блока управления 11.
Выход схемы формирования порога 18, который является выходом значения порога h, соединен со вторым входом схемы обнаружения и анализа кластера лучей 8.
Вход схемы управления 19 и первый вход схемы обнаружения и анализа кластера лучей 8, которые являются входами управляющих сигналов, соединены с первым выходом блока управления 11.
Блок поиска 12 работает следующим образом.
Входной сигнал поступает на первый и второй входы К параллельных квадратурных корреляторов 16-1 – 16-K и на первый и второй входы схемы формирования порога 18. На третий вход квадратурных корреляторов 16-1 - 16-АK поступает опорный сигнал с генератора ПСП 17. Для смежных квадратурных корреляторов этот сигнал сдвинут на дискрет времени поиска, равный, например, половине чипа ПСП. Временные сдвиги (задержки) опорных сигналов генератора ПСП 17 задает сигнал временных сдвигов генератора ПСП схемы управления 19. В каждом квадратурном корреляторе 16-1 - 16-К входной пилот сигнал перемножается на опорный сигнал. Результаты перемножения накапливают, формируя синфазную и квадратурную составляющие комплексных корреляционных откликов сигнала. Квадраты синфазной и квадратурной частей соответствующих комплексных корреляционных откликов суммируют, в результате чего формируют значения решающей функции для заданных дискретных временных задержек области многолучевости. Значения сформированной решающей функции через мультиплексор 20 поступают на третий вход схемы обнаружения и анализа кластера лучей 8 и на вход блока управления 11.
Схема управления 19 по сигналу с выхода блока управления 11 осуществляет временной сдвиг генератора псевдослучайной последовательности 17 и обнуляет сумматоры квадратурных корреляторов 16-1 - 16-K.
По входному сигналу схема формирования порога 18 формирует порог h, который выбирают, например, пропорционально мощности шума. Значение порога h поступает на второй вход схемы обнаружения и анализа кластера лучей 8.
В схеме 8 значения решающих функций сравниваются с порогом h. При превышении порога h принимают решение о наличии сигнала для заданных дискретных временных задержек области многолучевости, и формируют оценки поиска временных задержек компонент многолучевого сигнала. Сформированные оценки поступают на блок управления 11.
Способ формирования мягких решений при приеме многолучевого сигнала прототипа по патенту РФ № 2120180 заключается в следующем:
- Формируют последовательность корреляционных откликов информационных символов для каждой уточненной компоненты многолучевого сигнала.
- Осуществляют взвешенное суммирование корреляционных откликов информационных символов всех уточненных компонент многолучевого сигнала, получая объединенные мягкие решения об информационных символах.
Корреляционные отклики информационных символов для каждой отобранной компоненты многолучевого сигнала формируют, например, определяя корреляцию входного сигнала с известной ПСП на интервалах длительности символов.
Веса при суммировании корреляционных откликов информационных символов уточенных компонент многолучевого сигнала выбирают таким образом, что большему по мощности сигналу соответствует больший весовой коэффициент.
Структурная схема устройства для реализации способа-прототипа формирования мягких решений приведена на фиг.4.
В состав блока формирования мягких решений 15 входят многоканальный приемник данных 13 и схема объединения мягких решений 14.
При этом первый и второй входы многоканального приемника данных 13 являются сигнальными входами устройства. Первые выходы и третьи входы многоканального приемника данных 13 соединены с блоком управления 11. Второй выход многоканального приемника данных 13, который является выходом последовательности корреляционных откликов символов уточненных компонент многолучевого сигнала, соединен с входами схемы объединения мягких решений 14, выход которой является выходом объединенных мягких решений устройства.
Блок 15 работает следующим образом:
В многоканальном приемнике данных 13 формируют последовательность корреляционных откликов информационных символов каждой уточненной компоненты многолучевого сигнала. Для этого начальные оценки временных задержек компонент уточняют с помощью системы слежения за временной задержкой. Далее: определяют корреляцию входного сигнала с известной ПСП, соответствующей уточненной временной задержке компоненты многолучевого сигнала. Сформированные корреляционные отклики уточненных компонент информационных символов многолучевого сигнала поступают на схему объединения мягких решений 14, где осуществляют их взвешенное суммирование, получая объединенные мягкие решения об информационных символах, которые поступают на выход устройства.
Веса при суммировании корреляционных откликов информационных символов уточенных компонент многолучевого сигнала выбираю таким образом, что большему по мощности сигналу соответствует больший весовой коэффициент.
Данный способ приема многолучевого сигнала имеет следующие недостатки.
Согласно описанию прототипа на каждом периоде приемник поиска последовательно просматривает область многолучевости. При этом в области многолучевости оценку поиска числа и временных задержек компонент многолучевого сигнала проводят без учета влияния боковых выбросов корреляционных откликов компонент многолучевого сигнала друг на друга.
В результате процедуры обновления осуществляется замена одной наиболее слабой компоненты совокупности предыдущего периода максимальной по мощности компонентой совокупности текущего периода. Это приводит к некоторому энергетическому выигрышу. Однако возможны случаи, когда несколько вновь обнаруженных компонент совокупности текущего периода превосходят по мощности компоненты совокупности предыдущего периода. Поэтому такой подход при обработке входного многолучевого сигнала приводит к энергетическим потерям, т.к. часть более мощных компонент совокупности многолучевого сигнала текущего периода не используется. Кроме того, максимальная компонента совокупности текущего периода может иметь временное положение (задержку), близкое к временному положению компонент совокупности предыдущего периода. Это приводит к нерациональному использованию однолучевых приемников. В итоге все выделенные каналы многоканального приемника данных могут быть настроены на одну и ту же наиболее мощную компоненту совокупности многолучевого сигнала.
Кроме того, не осуществляется оптимизация числа сигналов лучей, которые используют для получения мягких решений об информационных символах, что приводит к завышенным требованиям к аппаратурной реализации без увеличения качества выделяемой информации.
Задача, которую решает предлагаемое изобретение - повышение помехоустойчивости и увеличение емкости системы связи при приеме многолучевого сигнала за счет эффективной периодической процедуры обновления компонент многолучевого сигнала при получении оценки поиска компонент, учета влияния компонент многолучевого сигнала друг на друга при проведении процедуры поиска, оптимизации числа компонент, которые используются для получения мягких решений об информационных символах.
Для решения этой задачи в способ приема многолучевого сигнала, заключающийся в том, что при приеме периодически определяют число и временные задержки компонент многолучевого сигнала, для чего:
- определяют временную область многолучевости,
- проводят поиск сигнала в области многолучевости и определяют оценку поиска числа и временных задержек компонент многолучевого сигнала,
- формируют обновленные число и временные задержки компонент многолучевого сигнала,
- находят временные задержки компонент многолучевого сигнала текущего периода, постоянно уточняя обновленные временные задержки компонент многолучевого сигнала,
- используя эти временные задержки, формируют мягкие решения об информационных символах,
дополнительно вводят следующие операции:
- формируют обновленные числа и временные задержки компонент многолучевого сигнала из компонент многолучевого сигнала предыдущего периода и тех компонент поиска, временные задержки которых отличаются от временных задержек каждой из компонент многолучевого сигнала предыдущего периода более, чем на заданную величину Th, причем
- если количество компонент сформированной совокупности не превышает заданное число L, то обновленное число компонент равно количеству компонент сформированной совокупности, а обновленные временные задержки компонент многолучевого сигнала равны временным задержкам компонент совокупности,
- если количество компонент сформированной совокупности больше заданного числа L, то оценивают мощность компонент совокупности и выбирают L наиболее мощных компонент, временные задержки которых являются обновленными временными задержками компонент многолучевого сигнала, в этом случае обновленное число компонент равно L.
Временную область многолучевости определяют как временную область задержек, начало которой на величину t1 меньше минимальной временной задержки компонент многолучевого сигнала предыдущего периода, а конец - на t2 больше максимальной временной задержки компонент многолучевого сигнала предыдущего периода.
Величину Th выбирают, например, равной половине чипа ПСП.
Величину L выбирают, например, равной максимальному количеству многолучевых компонент, используемых для демодуляции данных.
Мощность компонент многолучевого сигнала можно оценивать по решающей функции поиска.
Для решения этой же задачи в способе приема многолучевого сигнала использован способ поиска многолучевого сигнала, заключающийся в том, что
- формируют комплексные корреляционные отклики пилот сигнала, определяя корреляцию входного сигнала с опорным сигналом, соответствующим заданным дискретным временным задержкам области многолучевости,
- определяют значения решающей функции для заданных дискретных временных задержек области многолучевости, суммируя квадраты синфазной и квадратурной частей соответствующих комплексных корреляционных откликов пилот сигнала,
- сравнивают значения сформированной решающей функции с заданным порогом h,
дополнительно введены следующие операции:
- формируют совокупность значений решающей функции, превысивших порог, и совокупность соответствующих им временных задержек (позиций),
- поэтапно формируют оценки поиска временных задержек компонент многолучевого сигнала, при этом на каждом этапе получают оценку одной компоненты, для чего:
- определяют элемент с максимальным значением из совокупности значений решающей функции текущего этапа, при этом совокупностью значений решающей функции первого этапа является сформированная совокупность значений решающей функции,
- сравнивают максимальное значение решающей функции текущего этапа с порогом h,
- в случае непревышения порога формирование оценки поиска временных задержек компонент многолучевого сигнала прекращают,
- в случае превышения порога:
временную задержку, соответствующую элементу с максимальным значением решающей функции текущего этапа, считают оценкой поиска временной задержки компоненты многолучевого сигнала,
производят коррекцию элементов совокупности значений решающей функции текущего этапа,
формируют совокупность значений решающей функции последующего этапа, исключая из скорректированной совокупности значений решающей функции текущего этапа элемент с максимальным значением.
Порог h выбирают, например, пропорциональным мощности шума.
Коррекцию элементов совокупности значений решающей функции текущего этапа производят, например, путем вычитания корректирующей величины из элементов совокупности, временные задержки которых отличаются от временной задержки максимального элемента не более чем на заданный временной порог η.
Корректирующую величину выбирают, например, пропорциональной максимальному элементу и обратно пропорциональной модулю разности временных задержек максимального и корректируемого элемента совокупности значений решающей функции текущего этапа.
Для приема многолучевого сигнала предлагается использовать способ формирования мягких решений, заключающийся в том, что
- формируют последовательность корреляционных откликов информационных символов для каждой компоненты многолучевого сигнала,
- осуществляют взвешенное суммирование корреляционных откликов информационных символов всех компонент многолучевого сигнала, получая объединенные мягкие решения об информационных символах,
дополнительно введены следующие операции:
до формирования последовательности корреляционных откликов информационных символов
- осуществляют отбор компонент многолучевого сигнала, для чего:
- производят оценку мощности компонент многолучевого сигнала,
- выполняют ранжирование компонент многолучевого сигнала по убыванию их мощности,
- последовательно для всех ранжированных компонент многолучевого сигнала, кроме первой,
формируют отношение мощности компоненты к сумме мощностей всех предыдущих ранжированных компонент,
сравнивают сформированное отношение с заданным порогом ν,
в случае превышения порога компоненту отбирают для формирования мягких решений,
в случае непревышения порога процедуру отбора компонент завершают,
- формирование последовательности корреляционных откликов информационных символов и их взвешенное суммирование осуществляют для отобранных компонент многолучевого сигнала.
Порог ν может быть выбран, например, по допустимым энергетическим потерям из-за ограничения используемых при демодуляции компонент.
Корреляционные отклики информационных символов для каждой отобранной компоненты многолучевого сигнала формируют, например, определяя корреляцию входного сигнала с известной ПСП на интервале длительности символов.
Весовые коэффициенты при суммировании корреляционных откликов информационных символов отобранных компонент многолучевого сигнала выбирают как комплексно сопряженные оценки комплексной огибающей информационных символов компонент многолучевого сигнала.
Для повышения помехоустойчивости и увеличения емкости системы связи при приеме многолучевого сигнала с использованием периодической процедуры обновления компонент многолучевого сигнала предлагается устройство приема многолучевого сигнала, содержащее блок поиска, блок управления, блок формирования мягких решений, причем первые и вторые входы блока поиска и блока формирования мягких решений объединены и являются входами синфазной и квадратурной составляющих входного многолучевого сигнала, третий вход блока поиска соединен с первым выходом блока управления, который является управляющим выходом, вторые выходы блока управления, которые являются выходами временных задержек обновленных компонент многолучевого сигнала текущего периода, соединены с третьими входами блока формирования мягких решений, первый выход блока формирования мягких решений является выходом мягких решений об информационных символах и выходом устройства, в которое согласно изобретению дополнительно введен блок обновления компонент сигнала, причем выход блока поиска, который является выходом оценок временных задержек и значений решающей функции поиска компонент многолучевого сигнала, соединен с первым входом блока обновления компонент сигнала, и четвертым входом блока формирования мягких решений, выход блока обновления компонент сигнала, который является выходом временных задержек обновленных компонент многолучевого сигнала соединен со входом блока управления, второй выход блока формирования мягких решений является выходом корреляционных откликов пилот символов и временных задержек компонент многолучевого сигнала предыдущего периода и соединен со вторым входом блока обновления компонент сигнала.
В устройстве приема многолучевого сигнала предлагается использовать блок поиска многолучевого сигнала, содержащий К квадратурных корреляторов, схему формирования порога, генератор псевдослучайной последовательности, схему управления, мультиплексор, причем первые и вторые входы корреляторов объединены с первым и вторым входами схемы формирования порога и являются входами синфазной и квадратурной составляющих входного многолучевого сигнала, третий вход каждого квадратурного коррелятора является входом сигнала псевдослучайной последовательности и соединен с соответствующим ему выходом генератора псевдослучайной последовательности, четвертый вход каждого квадратурного коррелятора, который является входом управляющего сигнала, соединен с соответствующим ему первым выходом схемы управления, второй выход схемы управления, который является выходом временных сдвигов генератора псевдослучайной последовательности, соединен со входом генератора псевдослучайной последовательности, выход каждого квадратурного коррелятора, который является выходом значений решающей функции для заданных временных задержек области многолучевости, соединен с соответствующим входом мультиплексора, вход схемы управления является входом управляющих сигналов, в который согласно изобретению введены схема обнаружения лучей, первый, второй и третий ключ, первый и второй компаратор, логический узел, счетчик, узел управления, схема ИЛИ, узел определения максимального элемента, первый и второй вычитатель, формирователь модуля, регистр, элемент памяти исходной совокупности решающих функций, элемент памяти исходной совокупности временных задержек, регистр памяти решающих функций поиска, регистр памяти оценки поиска временных задержек, формирователь сигнала коррекции, причем выход мультиплексора, который является выходом значений решающей функции области многолучевости, соединен с первым входом схемы обнаружения лучей, второй выход схемы управления, который является выходом временных сдвигов генератора псевдослучайной последовательности, соединен со вторым входом схемы обнаружения лучей, выход схемы формирования порога, который является выходом значения порога, соединен с третьим входом схемы обнаружения лучей и первым входом первого компаратора, первый выход схемы обнаружения лучей, который является выходом временных задержек, соединен со вторым входом элемента памяти исходной совокупности временных задержек, второй выход схемы обнаружения лучей, который является выходом значений решающих функций, превысивших порог, соединен со вторым входом элемента памяти исходной совокупности решающих функций, третий выход схемы обнаружения лучей, который является выходом сигнала, равного числу обнаруженных компонент, превысивших порог, соединен с первым входом узла управления, четвертый выход схемы обнаружения лучей, который является выходом сигнала индикации превышения порога для заданной дискретной временной задержки, соединен со вторым входом узла управления, первый выход узла управления, который является выходом сигнала записи, соединен с первым входом элемента памяти исходной совокупности решающих функций и с первым входом элемента памяти исходной совокупности временных задержек, выход элемента памяти исходной совокупности решающих функций, который является выходом решающей функции текущего этапа, соединен с первым входом узла определения максимального элемента, с первым входом второго вычитателя, с первыми входами первого и второго ключей, второй вход узла определения максимального элемента является входом управления и соединен с пятым выходом узла управления, выход узла определения максимального элемента, который является выходом адреса выбранного максимального элемента, соединен с пятым входом узла управления, второй выход узла управления, который является выходом сигнала индикации наличия максимума, соединен со вторым входом первого ключа и первым входом логического узла, выход первого ключа соединен со вторым входом первого компаратора, выход первого компаратора, который является выходом превышения порога, соединен со вторым входом логического узла, первым входом счетчика, со вторыми управляемыми входами второго и третьего ключей, с первым входом регистра, третий выход узла управления, который является выходом числа обнаруженных компонент текущего периода поиска, соединен со вторым входом счетчика, выход счетчика соединен с первым входом схемы ИЛИ, второй вход которой соединен с выходом логического узла, выход схемы ИЛИ, который является выходом индикатора окончания процедуры поиска, соединен с третьим входом узла управления, четвертый выход узла управления, который является выходом управляющего сигнала формирования оценки поиска, соединен с первым входом регистра памяти решающих функций поиска, первым входом регистра памяти оценки поиска временных задержек и с третьим входом формирователя сигнала коррекции, второй вход регистра памяти решающих функций поиска и первый вход формирователя сигнала коррекции объединены и соединены с выходом второго ключа, который является выходом максимального значения решающей функции текущего этапа, вторые входы регистра памяти оценки поиска временных задержек и регистра объединены и соединены с выходом третьего ключа, первый вход которого объединен с первым входом первого вычитателя и соединен с выходом элемента памяти исходной совокупности временных задержек, который является выходом значения временной задержки, соответствующей максимальному элементу, выход регистра, который является выходом значений временной задержки, соединен со вторым входом первого вычитателя, выход первого вычитателя, который является выходом разности временных задержек, соединен со входом формирователя модуля, выход модуля сигнала разности формирователя модуля соединен со вторым входом формирователя сигнала коррекции и первым входом второго компаратора, второй вход второго компаратора является пороговым входом, выход второго компаратора является выходом превышения порога и соединен с четвертым входом узла управления и четвертым входом формирователя сигнала коррекции, выход формирователя сигнала коррекции, являющийся выходом сигнала коррекции, соединен со вторым входом второго вычитателя, выход которого соединен со вторым входом элемента памяти исходной совокупности решающих функций, выход регистра памяти оценки поиска временных задержек и выход регистра памяти решающих функций поиска объединены и являются выходом блока поиска.
В устройстве приема многолучевого сигнала предлагается использовать блок формирования мягких решений, содержащий многоканальный приемник данных и схему объединения мягких решений, первый и второй входы многоканального приемника данных являются входами синфазной и квадратурной составляющих компонент входного сигнала и первым и вторым входами устройства, выход многоканального приемника данных соединен со входом схемы объединения мягких решений, который является входом последовательности корреляционных откликов информационных и пилот символов компонент многолучевого сигнала, выход объединенных мягких решений схемы объединения мягких решений является первым выходом блока, в который согласно изобретению дополнительно введены регистр памяти, первый, второй и третий мультиплексоры, узел оценки мощности, ключ, первый, второй и третий узлы памяти, счетчик, сумматор, первый и второй компараторы, схема ИЛИ, схема НЕ, узел ранжирования, формирователь отношения, узел управления, причем третий вход блока является входами временных задержек и первыми входами второго мультиплексора, четвертый вход блока является входом значений решающей функции поиска текущего этапа и первым входом первого мультиплексора, выход многоканального приемника данных соединен со входом узла оценки мощности, который является входом последовательности корреляционных откликов пилот символов компонент многолучевого сигнала, кроме того, выход многоканального приемника данных является выходом последовательности корреляционных откликов пилот символов и временных задержек компонент многолучевого сигнала и вторым выходом устройства, вторые входы первого и второго мультиплексоров являются управляющими и соединены с первым выходом узла управления, выход узла оценки мощности, который является выходом оценки мощности компонент многолучевого сигнала, соединен с первым входом третьего мультиплексора, выход первого мультиплексора объединен с выходом третьего мультиплексора, который является выходом сигнала оценки мощности компонент многолучевого сигнала, и соединен с первым входом третьего узла памяти, выход второго мультиплексора, который является выходом временных задержек обновленных компонент многолучевого сигнала, соединен с первым входом первого узла памяти, второй вход которого объединен со вторым входом третьего мультиплексора и соединен со вторым управляющим выходом узла управления, третий выход узла управления является выходом сигналов управления и соединен со вторым входом третьего узла памяти, первым входом первого компаратора и первым входом регистра памяти, выход третьего узла памяти, который является выходом оценки мощности текущей компоненты, соединен с первым входом узла ранжирования, первым входом сумматора и первым входом формирователя отношения, выход узла ранжирования, который является выходом упорядоченных адресов ячеек памяти, соединен с первым входом узла управления, второй вход узла ранжирования соединен с четвертым управляющим выходом узла управления, пятый выход узла управления, который является выходом сигнала записи, соединен со вторым входом второго узла памяти, первый вход которого соединен с выходом сумматора, выход второго узла памяти, который является выходом суммарных мощностей всех предыдущих ранжированных компонент, соединен со вторым входом сумматора и вторым входом формирователя отношения, выход формирователя отношения соединен с первым входом второго компаратора, второй вход которого является пороговым входом, выход второго компаратора, который является выходом сигнала превышения порога, соединен со входом схемы НЕ, со входом счетчика и с первым входом ключа, второй вход ключа соединен с выходом первого узла памяти, выход ключа соединен со вторым входом регистра памяти, который является входом временной задержки компоненты многолучевого сигнала, выход регистра памяти, который является выходом совокупности временных задержек отобранных компонент, соединен с третьим входом многоканального приемника данных, выход схемы НЕ является инверсным выходом и соединен с первым входом схемы ИЛИ, выход счетчика является выходом сигнала, равного числу превышений порога, и соединен со вторым входом первого компаратора, выход первого компаратора соединен со вторым входом схемы ИЛИ, выход которой является выходом сигнала индикации завершения процедуры отбора компонент для формирования мягких решений и соединен со вторым входом узла управления.
Сопоставительный анализ способа приема многолучевого сигнала, способа поиска при приеме многолучевого сигнала, способа формирования мягких решений при приеме многолучевого сигнала с прототипом показывает, что предлагаемые изобретения существенно отличаются от прототипа, так как позволяют повысить помехоустойчивость и увеличить емкость системы связи при приеме многолучевого сигнала.
Сопоставительный анализ заявляемых способов с другими техническими решениями в данной области техники не позволил выявить признаки, заявленные в отличительных частях формулы изобретения. Следовательно, заявляемые способ приема многолучевого сигнала, способ поиска при приеме многолучевого сигнала, способ формирования мягких решений при приеме многолучевого сигнала отвечают критериям "новизна", "техническое решение задачи", "существенные отличия" и обладает неочевидностью решения.
Сопоставительный анализ устройства приема многолучевого сигнала, приемника поиска многолучевого сигнала и формирователя мягких решений при приеме многолучевого сигнала с прототипом показывает, что предлагаемые изобретения существенно отличаются от прототипа, так как приводят к повышению помехоустойчивости и увеличению емкости системы связи при приеме многолучевого сигнала за счет введения новых блоков и связей блоков устройств.
Сопоставительный анализ заявляемых устройств с другими техническими решениями в данной области техники не позволил выявить признаки, заявленные в отличительных частях формулы изобретения. Следовательно, заявляемые устройство приема многолучевого сигнала, приемник поиска многолучевого сигнала и формирователь мягких решений при приеме многолучевого сигнала отвечают критериям "новизна", "техническое решение задачи", "существенные отличия" и обладают неочевидностью решения.
Графические материалы, представленные в материалах заявки:
Фиг.1 - подробная структурная схема устройства приема многолучевого сигнала (прототип).
Фиг.2 - укрупненная структурная схема устройства приема многолучевого сигнала (прототип).
Фиг.3 - структурная схема блока поиска (прототип).
Фиг.4 - структурная схема блока формирования мягких решений (прототип).
Фиг.5 - структурная схема предлагаемого устройства приема многолучевого сигнала.
Фиг.6 - вариант выполнения блока обновления компонент сигналов.
Фиг.7 - вариант выполнения узла оценки мощности.
Фиг.8 - вариант выполнения узла выбора.
Фиг.9 - структурная схема предлагаемого блока поиска при приеме многолучевого сигнала.
Фиг.10 - вариант выполнения схемы обнаружения лучей.
Фиг.11 - вариант выполнения формирователя сигнала коррекции.
Фиг.12 - вариант выполнения логического узла.
Фиг.13 - структурная схема предлагаемого блока формирования мягких решений при приеме многолучевого сигнала.
Предлагаемый способ приема многолучевого сигнала заключается в следующем.
Периодически определяют число и временные задержки компонент многолучевого сигнала, для чего производят следующие операции:
- Определяют временную область многолучевости.
- Проводят поиск сигнала в области многолучевости и определяют оценку поиска числа и временных задержек компонент многолучевого сигнала.
- Формируют обновленные число и временные задержки компонент многолучевого сигнала, для чего:
- формируют совокупность компонент, состоящую из компонент многолучевого сигнала предыдущего периода и тех компонент поиска, временные задержки которых отличаются от временных задержек каждой из компонент многолучевого сигнала предыдущего периода более чем на заданную величину Th;
- если количество компонент сформированной совокупности не превышает заданное число L, то обновленное число компонент равно количеству компонент сформированной совокупности, а обновленные временные задержки компонент многолучевого сигнала равны временным задержкам компонент совокупности;
- если количество компонент сформированной совокупности больше заданного числа L, то оценивают мощность компонент совокупности и выбирают L наиболее мощных компонент, временные задержки которых являются обновленными временными задержками компонент многолучевого сигнала. В этом случае обновленное число компонент равно L.
- Находят временные задержки компонент многолучевого сигнала текущего периода, постоянно уточняя обновленные временные задержки компонент многолучевого сигнала.
- Используя эти временные задержки, формируют мягкие решения об информационных символах.
Временную область многолучевости определяют как временную область задержек, начало которой на величину t1 меньше минимальной временной задержки компонент многолучевого сигнала предыдущего периода, а конец - на t2 больше максимальной временной задержки компонент многолучевого сигнала предыдущего периода.
Величину Th выбирают, например, равной половине чипа ПСП.
Величину L выбирают, например, равной максимальному количеству многолучевых компонент, используемых для демодуляции данных.
Мощность компонент многолучевого сигнала оценивают, например, по решающей функции поиска.
Для реализации предлагаемого способа приема многолучевого сигнала используется устройство, представленное на фиг.5, где обозначено:
11 - блок управления,
12 - блок поиска,
15 - блок формирования мягких решений,
21 - блок обновления компонент сигнала.
Устройство приема многолучевого сигнала содержит блок поиска 12, блок управления 11, блок формирования мягких решений 15, блок обновления компонент сигнала 21. Первые и вторые входы блока поиска 12 и блока формирования мягких решений 15 объединены и являются входами синфазной и квадратурной составляющих входного многолучевого сигнала (сигнальными входами устройства).
Третий вход блока поиска 12 соединен с первым выходом блока управления 11, который является выходом управления. Вторые выходы блока управления 11, которые являются выходами временных задержек обновленных компонент многолучевого сигнала текущего периода, соединены с третьими входами блока формирования мягких решений 15. Первый выход блока формирования мягких решений 15 является выходом мягких решений об информационных символах и выходом устройства.
Выход блока поиска 12, который является выходом оценок временных задержек и значений решающей функции поиска компонент многолучевого сигнала текущего периода, соединен с первым входом блока обновления компонент сигнала 21 и четвертым входом блока формирования мягких решений 15.
Выход блока обновления компонент сигнала 21, который является выходом временных задержек обновленных компонент многолучевого сигнала текущего периода, соединен со входом блока управления 11.
Второй выход блока формирования мягких решений 15 является выходом корреляционных откликов пилот символов обновленных компонент многолучевого сигнала и обновленных временных задержек компонент многолучевого сигнала предыдущего периода и соединен со вторым входом блока обновления компонент сигнала 21.
Работает предлагаемое устройство приема многолучевого сигнала следующим образом.
Входной комплексный сигнал устройства, содержащий синфазную и квадратурную составляющие, поступает на первый и второй входы блока поиска 12 и на первый и второй входы блока формирования мягких решений 15.
В блоке поиска 12 периодически анализируют область многолучевости. При этом на каждом текущем периоде поиска, например, как в прототипе, путем корреляционной обработки и сравнения значений решающей функции поиска с порогом определяют оценку поиска числа и временных задержек компонент многолучевого сигнала. Оценка временных задержек компонент многолучевого сигнала и соответствующие им значения решающей функции поиска поступают на первый вход блока обновления компонент сигнала 21 и на четвертый вход блока формирования мягких решений 15.
Область многолучевости для текущего периода поиска определяют в блоке управления 11 по сигналу, который поступает на его вход с выхода блока обновления компонент сигнала 21.
Границы области многолучевости текущего периода поиска определяют, например, следующим образом: за нижнюю границу принимают временную задержку, расположенную на t1 ранее временной задержки первой обнаруженной компоненты многолучевого сигнала (компоненты с наименьшей временной задержкой), а за верхнюю границу принимают временную задержку, расположенную на t2 позже временной задержки последней обнаруженной компоненты многолучевого сигнала.
Информация о размере и временном положении области многолучевости с первого выхода управления блока управления 11 поступает на третий вход блока поиска 12.
В блоке обновления компонент сигнала 21 формируют обновленное число и временные задержки компонент многолучевого сигнала:
- Для текущего периода поиска по оценке временных задержек и значений решающей функции поиска компонент многолучевого сигнала блока поиска 12 и по корреляционным откликам обновленных компонент многолучевого сигнала с уточненными временными задержками блока формирования мягких решений 15.
- Для первого периода поиска по оценкам временных задержек компонент многолучевого сигнала блока поиска 12.
Обновленные временные задержки компонент многолучевого сигнала текущего периода с блока 21 поступают на вход блока управления 11, со второго выхода которого на третий вход блока формирования мягких решений 15 поступает совокупность обновленных временных задержек компонент многолучевого сигнала предыдущего периода.
По сформированным временным задержкам в блоке формирования мягких решений 15 осуществляют перестройку генератора псевдослучайных последовательностей приемников данных 13, производят уточнение временных задержек обновленных компонент многолучевого сигнала текущего периода и формируют корреляционные отклики символов уточненных компонент.
Со второго выхода блока формирования мягких решений 15 уточненные временные задержки и соответствующие корреляционные отклики пилот символов обновленных компонент многолучевого сигнала поступают на вторые входы блока обновления сигнала 21.
В блоке формирования мягких решений 15 осуществляют взвешенное суммирование сформированных корреляционных откликов информационных символов уточненных компонент многолучевого сигнала, получая объединенные мягкие решения об информационных символах, которые поступают на выход устройства.
Веса при суммировании выходных сигналов блока формирования мягких решений 15 выбирают, например, как комплексно сопряженные оценки комплексной огибающей информационных символов обновленных компонент многолучевого сигнала с уточненными временными задержками приемников данных.
Блок управления 11 является типовым блоком и может быть реализован различными средствами, например, на современных микропроцессорах цифровой обработки сигналов (DSP) - TMS320Cxx, Motorola 56xxx, Intel и т.п.
Вариант выполнения блока обновления компонент сигнала 21 предлагаемого устройства приема многолучевого сигнала представлен на фиг.6.
На фиг.6 используются следующие обозначения:
22, 32, 36, 41 - мультиплексоры,
23, 33, 35 - ключи,
24 - вычитатель,
25 - регистр,
26 - схема ИЛИ-НЕ,
27 - триггер,
28 - формирователь модуля,
29, 39 - компараторы,
30 - схема НЕ,
31 - счетчик,
34 - сумматор,
37, 38, 42 - узлы памяти,
40 - узел оценки мощности,
43 - узел выбора,
44 - узел управления.
Узлы 22-31, входящие в состав блока 21, определяют компоненты поиска текущего этапа, временные задержки которых отличаются от временных задержек каждой из компонент многолучевого сигнала предыдущего периода более, чем на заданную величину Th.
В узле памяти 37 формируют и запоминают совокупность временных задержек компонент многолучевого сигнала предыдущего периода и тех компонент поиска текущего этапа, временные задержки которых отличаются от временных задержек каждой из компонент многолучевого сигнала предыдущего периода более чем на заданную величину Th.
Узел оценки мощности 40, мультиплексор 41, узел памяти 42, мультиплексор 32 и ключ 33 используют для формирования в узле памяти 42 совокупности оценок мощности (решающей функции) компонент многолучевого сигнала предыдущего периода и оценок поиска мощности (решающей функции) компонент многолучевого сигнала текущего периода, временные задержки которых отличаются от временных задержек каждой из компонент многолучевого сигнала предыдущего периода более чем на заданную величину Th.
Сумматор 34, узел памяти 38, ключ 35 и компаратор 39 формируют сигналы о количестве компонент в узлах памяти 37 и 42 и сигнал управления о факте превышения сигналом количества компонент заданного числа L.
Узел выбора 43 формирует адреса совокупности обновленных временных задержек L. наиболее мощных компонент многолучевого сигнала, записанных в узле памяти 37.
Блок обновления компонент сигнала 21 работает следующим образом.
С блока поиска 12 на первые входы мультиплексора 22, на первые входы мультиплексора 32 и на первые входы узла управления 44 поступают соответственно оценки поиска временных задержек компонент многолучевого сигнала, оценки поиска мощности (решающей функции) и оценка поиска числа компонент многолучевого сигнала текущего периода.
С блока формирования мягких решений 15 на первый вход мультиплексора 36 и первый вход узла оценки мощности 40 поступают соответственно временные задержки и корреляционные отклики пилот символов обновленных компонент многолучевого сигнала предыдущего периода.
В узле оценки мощности 40 по корреляционным откликам символов обновленных компонент и сигналам сброса со второго выхода узла управления 44, поступающим на второй вход узла оценки мощности 40, формируют оценку мощности (решающую функцию) обновленных компонент многолучевого сигнала предыдущего периода, которая поступает на первый вход мультиплексора 41.
С третьего выхода узла управления 44 на второй вход мультиплексора 41 поступает сигнал коммутации, по которому производят поэлементную передачу на выход мультиплексора и первый вход узла памяти 42 оценок мощности (решающей функции) обновленных компонент многолучевого сигнала предыдущего периода.
В узле памяти 42 по сигналу записи, поступающему с четвертого выхода узла управления 44 на второй вход узла памяти 42, формируют совокупность оценок мощности (решающая функция) обновленных компонент многолучевого сигнала предыдущего периода, а по сигналу считывания, поступающему с того же выхода блока управления 44, эта совокупность с выхода узла памяти 42 поступает на первый вход узла выбора 43.
С первого выхода узла управления 44 на второй вход мультиплексора 36 поступает сигнал коммутации, по которому производят поэлементную передачу на выход мультиплексора 36 и первый вход узла памяти 37 оценок обновленных временных задержек компонент многолучевого сигнала предыдущего периода.
В узле памяти 37 по сигналу записи, поступающему с третьего выхода узла управления 44 на второй вход узла памяти 37, формируют совокупность оценок обновленных временных задержек компонент многолучевого сигнала предыдущего периода.
Далее рассмотрена процедура формирования совокупности временных задержек предыдущего периода и тех компонент поиска текущего этапа, временные задержки которых отличаются от временных задержек каждой из компонент многолучевого сигнала предыдущего периода более чем на заданную величину порога Th.
С первого выхода узла управления 44 на второй вход мультиплексора 22 и на второй вход мультиплексора 32 поступает сигнал коммутации, по которому производят поэлементную передачу на выход мультиплексора 22 оценок поиска временных задержек компонент многолучевого сигнала текущего периода, а на выход мультиплексора 32 оценок поиска мощности (решающей функции) соответствующих компонент многолучевого сигнала.
Одновременно с первого выхода узла управления 44 на второй вход регистра 25 поступают соответствующие сигналы тактовой частоты, сигналы записи и считывания, а на первый вход счетчика 31 сигналы тактовой частоты и оценки поиска числа компонент многолучевого сигнала текущего периода.
Поэлементно оценки поиска временных задержек компонент многолучевого сигнала текущего периода с выхода мультиплексора 22 поступают на первый вход ключа 23 и второй вход вычитателя 24. На первый вход вычитателя 24 с выхода узла памяти 37 по команде считывания с третьего выхода узла управления 44 поэлементно поступают оценки обновленных временных задержек компонент многолучевого сигнала предыдущего периода.
Коммутацию мультиплексора 22 и считывание из узла памяти 37 осуществляют по сигналам управления с узла управления 44 таким образом, что оценку поиска временных задержек каждой компоненты многолучевого сигнала текущего периода последовательно сравнивают в вычитателе 24 со всеми оценками обновленных временных задержек компонент многолучевого сигнала предыдущего периода.
Выходной сигнал вычитателя 24, представляющий собой величину (значение) разности оценки поиска временных задержек компонент многолучевого сигнала текущего периода и оценки обновленных временных задержек компонент многолучевого сигнала предыдущего периода поступает на вход формирователя модуля 28, в котором формируется модуль этого сигнала. Сформированный сигнал с выхода формирователя модуля 28 поступает на первый вход компаратора 29, на второй вход которого подают заданный сигнал порога Th. Значение сигнала порога Th выбирают, например, равным половине чипа ПСП.
При превышении выходным сигналом формирователя модуля 28 сигнала порога Th на выходе компаратора 29 вырабатывают сигнал, равный, например, логической единице. В противном случае вырабатывают сигнал, равный, например, логическому нулю. Этот сигнал поступает на вход схемы НЕ 30. С выхода схемы НЕ 30 инверсный сигнал поступает на первый вход регистра 25 с последовательным входом и параллельным выходом, например, реализованный на базе стандартных микросхем серии 561ПР1 или серии 1564ИР8. Регистр 25 предварительно обнуляют по включению питания или по сигналу индикации окончания текущего цикла сравнения, который в процессе работы формируют на выходе счетчика 31. Сигнал индикации окончания текущего цикла сравнения с выхода счетчика 31 поступает на третий вход регистра 25 и на второй вход триггера 27.
Сигнал индикации окончания текущего цикла сравнения могут формировать с использованием стандартных программируемых счетчиков, например, серии 564ИЕ10 или др.
Исходное состояние счетчика 31 задают по команде управления с первого выхода узла управления 44 на управляющий вход счетчика по известному числу компонент совокупности предыдущего периода, которые хранятся в узле памяти 37. При этом на счетный вход счетчика 31 подают сигнал тактовых импульсов, а на второй вход регистра 25 подают сигнал записи.
Сигнал индикации окончания текущего цикла сравнения формируют, например, по моменту появления сигнала логической единицы на выходе старшего разряда счетчика 31, который соответствует завершению считывания из узла памяти 37 всех компонент совокупности предыдущего периода.
При такой организации процедуры формирования совокупности временных задержек счетчик 31 для каждого цикла считывания из узла памяти 37 вырабатывает сигнал индикации окончания текущего цикла.
Последовательно по результатам сравнения в вычитателе 24 оценок поиска временных задержек каждой компоненты многолучевого сигнала текущего периода со всеми оценками обновленных временных задержек компонент многолучевого сигнала предыдущего периода на выходе схемы НЕ 30 формируют сигнал сравнения, равный логическому нулю, если оценки временных задержек компонент многолучевого сигнала отстоят друг от друга не менее чем на Th, и равный логической единице в противном случае. Сформированные сигналы сравнения последовательно записывают в регистр 25. С параллельных выходов регистра 25 сигналы сравнения поступают на входы схемы ИЛИ-НЕ 26, выходной сигнал которой по сигналу индикации окончания текущего цикла сравнения записывают в триггер 27, а регистр 25 обнуляют.
Выходной сигнал триггера 27 поступает на второй управляющий вход ключа 23, на второй управляющий вход ключа 33 и на первый вход сумматора 34. Выходной сигнал схемы ИЛИ-НЕ 26 (триггера 27) равен логической единице, если оценка временной задержки анализируемой компоненты сигнала текущего периода отстоит от всех оценок обновленных временных задержек компонент многолучевого сигнала предыдущего периода не менее чем на Th. В противном случае выходной сигнал схемы ИЛИ-НЕ 26 (триггера 27) равен логическому нулю.
По сигналу, равному логической единице, оценку поиска временной задержки анализируемой компоненты сигнала текущего периода с выхода мультиплексора 22 через ключ 23 передают на первый вход узла памяти 37 и запоминают. Соответствующую оценку поиска мощности (решающую функцию) многолучевого сигнала текущего периода с выхода мультиплексора 32 через ключ 33 передают на первый вход узла памяти 42 и запоминают.
По сигналу, равному логическому нулю, ключи 23, 33 блокируют, и запись в узлы памяти не производят.
При завершении процедуры сравнения всех оценок поиска временных задержек компонент многолучевого сигнала текущего периода со всеми оценками обновленных временных задержек компонент многолучевого сигнала предыдущего периода в узле памяти 37 формируют совокупность временных задержек компонент многолучевого сигнала предыдущего периода и тех компонент поиска, временные задержки которых отличаются от временных задержек каждой из компонент многолучевого сигнала предыдущего периода более чем на заданную величину порога Th. Одновременно в узле памяти 42 формируют совокупность оценок поиска мощности (решающей функции) соответствующих компонент многолучевого сигнала.
Для каждого цикла процедуры сравнения выходной сигнал триггера 27, равный логической единице или логическому нулю, поступает на первый вход сумматора 34. На второй вход сумматора 34, на первый вход компаратора 39 и второй вход узла управления 44 поступает сигнал с выхода узла памяти 38, который соответствует числу компонент совокупности текущего периода. В сумматоре 34 для каждого цикла сравнения суммируют число, записанное в узле памяти 38 и сигнал с выхода триггера 27. Результат суммирования поступает на первый вход узла памяти 38, который запоминают по сигналу записи, приходящему с четвертого выхода узла управления 44 на второй вход узла памяти 38.
После завершения процедуры формирования совокупности компонент текущего этапа по сигналу считывания, приходящему с четвертого выхода узла управления 44 на второй вход узла памяти 38, результат суммирования с выхода узла памяти 38 поступает на вход компаратора 39. В компараторе 39 этот сигнал сравнивают с заданным числом L, которое поступает на второй вход компаратора 39 и на второй вход ключа 35.
На выходе компаратора 39 вырабатывается сигнал управления процедуры формирования совокупности обновленных временных задержек, который поступает на первый вход ключа 35 и на третий вход узла управления 44.
Если сигнал с выхода узла памяти 38 превышает заданное число L, то на выходе компаратора 39 вырабатывается сигнал, равный в данном случае логической единице, который поступает на первый вход ключа 35 и на третий вход узла управления 44. На второй вход узла управления 44 с выхода узла памяти 38 поступает сигнал, который соответствует числу компонент суммарной совокупности. По этим сигналам узел управления 44 вырабатывает сигналы управления для узла выбора 43 и узла памяти 42, которые соответственно поступают с пятого выхода узла управления 44 на второй вход узла выбора 43 и с четвертого выхода узла управления 44 на второй вход узла памяти 42.
Сигналы управления с четвертого и пятого выхода узла управления 44 содержат сигнал тактовой частоты, сигналы записи и считывания, сигналы, соответствующие числу компонент суммарной совокупности и заданному числу L. По этим сигналам из узла памяти 42 в узел выбора 43 производят считывание совокупности оценок поиска мощности (решающей функции) соответствующих компонент многолучевого сигнала и формируют адреса временных задержек L наиболее мощных компонент многолучевого сигнала, записанных в узле памяти 37. Сформированные адреса с выхода узла выбора 43 поступают на четвертый вход узла управления 44. Узел управления 44 производит считывание из узла памяти 37 обновленной совокупности временных задержек текущего периода, находящихся по сформированным адресам. Обновленная совокупность временных задержек текущего периода с выхода узла памяти 37 и соответствующие ей адреса с шестого выхода узла управления 44 поступают на блок управления 11.
Если сигнал с выхода узла памяти 38 не превышает заданное число L, то по команде управления с третьего выхода узла управления 44 производят считывание из узла памяти 37 в блок управления 11 всей совокупности временных задержек компонент многолучевого сигнала текущего периода.
Узел управления 44 может быть реализован различным образом, например, на современных микропроцессорах цифровой обработки сигналов (DSP) - TMS320Cxx, Motorola 56xxx, Intel и т.п.
Вариант выполнения узла оценки мощности 40 предлагаемого устройства приема многолучевого сигнала представлен на фиг.7.
Узел оценки мощности 40 работает следующим образом.
На первые входы сумматоров со сбросом 46, 50 узлов оценки мощности компоненты 45-1, 45-М со второго выхода блока формирования мягких решений 15 поступают соответственно синфазные и квадратурные составляющие корреляционных откликов обновленных компонент многолучевого сигнала (Асi Asi i=1...M). На вторые входы сумматоров со сбросом 46, 50 и 49 узлов оценки мощности компоненты 45-1, 45-М с узла управления 44 поступают соответственно сигналы сброс 1 и сброс 2. В сумматорах со сбросом 46, 50 на временных интервалах между сигналами сброса производят когерентное накопление синфазных и квадратурных составляющих корреляционных откликов обновленных компонент многолучевого сигнала. При формировании сигнала сброс 1 для сумматоров со сбросом 46, 50 учитывают интервал когерентности многолучевого сигнала. Сформированные сигналы с выходов сумматоров со сбросом 46, 50 поступают соответственно на входы квадраторов 47 и 51, где формируют сигналы, равные квадратам синфазных и квадратурных составляющих корреляционных откликов. Эти сигналы поступают соответственно на первый и второй вход сумматора 48, на выходе которого формируют последовательность сумм квадратов синфазных и квадратурных составляющих корреляционных откликов, которая поступает на вход сумматора со сбросом 49. В сумматорах со сбросом 49 узлов оценки мощности компоненты 45-1, 45-М производят некогерентное накопление сумм квадратов синфазных и квадратурных составляющих корреляционных откликов и формируют совокупность оценок мощности (решающей функции) компонент многолучевого сигнала предыдущего периода, которая поступает на вход мультиплексора 41. Характеристики сигналов сброс 1 для сумматоров со сбросом 46, 50 и сброс 2 для сумматора со сбросом 49 выбирают таким образом, чтобы обеспечить условия для оценки мощности компонент многолучевого сигнала, такие же, как в блоке поиска 12. Это необходимо для получения адекватных оценок, которые используются для сравнения в узле выбора 43.
Вариант выполнения узла выбора 43 предлагаемого устройства приема многолучевого сигнала представлен на фиг.8.
Предварительно следует отметить, что для реализации конкретного решения использование элемента памяти 55 в узле выбора 43 избыточно. Однако такой подход позволяет получить универсальную структуру, которую можно использовать в предлагаемом устройстве для решения различных задач.
Узел выбора 43 по суммарной совокупности N оценок поиска мощности (решающей функции) компонент многолучевого сигнала, сформированной в узле памяти 42, формирует адреса обновленных временных задержек для L ранжированных наиболее мощных компонент совокупности. При этом N>L.
Узел выбора 43 работает следующим образом.
На первый вход элемента памяти 55 с выхода узла памяти 42 поступает суммарная совокупность из N оценок поиска мощности (решающей функции) компонент многолучевого сигнала. По сигналу записи, поступающему с узла управления 44 на второй вход элемента
памяти 55, эту совокупность запоминают. Следует отметить, что элемент памяти 55 имеет структуру, тождественную узлу памяти 42 и 37, то есть по одинаковым адресам записаны соответствующие параметры компонент совокупности.
Далее все операции выполняют с компонентами совокупности, записанной в элемент памяти 55.
Процедуру выбора осуществляют в L этапов. Для каждого этапа, который состоит из K циклов, определяют максимальный элемент совокупности элемента памяти 55 и запоминают соответствующий ему адрес в регистре адресов 60. Максимальный элемент совокупности элемента памяти 55 обнуляют и выполняют следующий этап для измененной совокупности элементов. Вся процедура занимает NxL циклов.
С узла управления 44 на второй вход элемента памяти 55 поступают сигнал тактовой частоты, сигнал считывания и адреса компонент совокупности. На первый вход ключа 57 поступают адреса компонент совокупности. На первый вход счетчика 61, на второй вход регистров 56, 58 и на первый вход регистра 52 поступает сигнал тактовой частоты. На второй вход счетчика 61 поступает сигнал, соответствующий числу компонент (циклов) N записанной в узле памяти 42 совокупности. На второй вход счетчика 62 поступает сигнал, соответствующий заданному числу (этапов) L.
На первом этапе регистр 52 предварительно обнуляют по сигналу, который поступает на его второй вход с узла управления 44.
Каждый последующий этап реализуют следующим образом.
С узла управления 44 на второй вход элемента памяти 55 и первый вход ключа 57 последовательно поступают адреса компонент совокупности. По сигналу считывания из элемента памяти 55 на первый вход регистра 56 производят последовательное считывание оценок мощности (решающей функции) компонент совокупности многолучевого сигнала. По сигналу записи, поступающему на второй вход регистра 56 с узла управления 44, считанные оценки мощности (решающей функции) компонент многолучевого сигнала записывают.
По сигналу считывания оценка мощности (решающей функции) анализируемой компоненты с выхода регистра 56 поступает на первый вход ключа 53 и на второй вход компаратора 54, на первый вход которого с выхода регистра 52 поступает нулевой сигнал для первого цикла или некоторая промежуточная наибольшая текущая оценка мощности компоненты для других циклов. Если сигнал на втором входе компаратора 54 больше, чем сигнал на его первом входе, то на выходе компаратора 54 формируют сигнал, равный логической единице, который поступает на второй вход ключа 53, на второй вход ключа 57, на третьи входы записи регистров 52 и 58.
По этому сигналу оценка мощности (решающей функции) компоненты многолучевого сигнала с выхода регистра 56 через ключ 53 поступает на четвертый вход регистра 52, которую записывают в нем вместо ранее записанной меньшей по мощности оценки.
Соответствующий адрес через ключ 57 поступает на первый вход регистра 58, который записывают в нем вместо ранее записанного адреса и передают на первый вход ключа 59.
Если сигнал на втором входе компаратора 54 меньше, чем сигнал на его первом входе, то на выходе компаратора 54 формируют сигнал, равный логическому нулю, и коммутацию ключей 53, 57 не осуществляют. Регистры 52 и 58 остаются в состоянии, соответствующем предыдущему циклу.
Таким образом на каждом цикле выбирают адрес, соответствующий большей по мощности компоненте измененной совокупности элементов.
Счетчик 61 по числу тактовых символов на первом входе и сигналу, соответствующему числу компонент совокупности N, формирует сигнал окончания текущего цикла и может быть реализован, например, на базе стандартного программируемого счетчика, например, серии 564ИЕ10 и др.
Сигнал окончания текущего цикла представляет собой, например, момент возникновения единичного сигнала в старшем разряде счетчика 61. Этот сигнал с выхода счетчика 61 поступает на первый вход счетчика 62, на второй вход ключа 59, на второй вход регистра 52 и на первый вход ключа 63, на второй вход которого поступает сигнал, равный нулю. Выходной сигнал ключа 63 поступает на первый вход элемента памяти 55.
По сигналу окончания текущего цикла обнуляют регистр 52 и с выхода ключа 63 на первый вход элемента памяти 55 подают сигнал нулевого уровня.
Адрес, соответствующий компоненте совокупности каждого этапа с максимальной оценкой мощности, через ключ 59 поступает на первый вход регистра адресов 60 и на второй вход элемента памяти 55.
По сигналу записи, поступающему с узла управления 44 на второй вход регистра адресов 60, адрес, соответствующий компоненте каждого этапа совокупности с максимальной оценкой мощности, запоминают в регистре адресов 60.
Таким образом на каждом этапе выбирают адрес, соответствующий большему элементу измененной совокупности.
В элементе памяти 55 по адресу, соответствующему компоненте совокупности с максимальной оценкой мощности, записывают нулевое значение.
Счетчик 62 по числу сигналов окончания текущего цикла на первом входе и сигналу, соответствующему числу этапов L, формирует сигнал окончания процедуры выбора и может быть реализован, например, на базе стандартного программируемого счетчика серии 564ИЕ10 и др.
Сигнал окончания процедуры выбора представляет собой, например, сигнал логической единицы на старшем разряде счетчика 62, который возникает в момент совпадения числа сигналов окончания текущего цикла и сигнала, соответствующего числу этапов L. Этот сигнал с выхода счетчика 62 поступает на узел управления 44. По сигналу окончания процедуры выбора в узле управления 44 формируют сигнал считывания, который поступает на второй вход регистра адресов 60. По этому сигналу из регистра адресов 60 в узел управления 44 считывают адреса L наиболее мощных компонент обновленной совокупности временных задержек.
Регистр адресов 60 с последовательным входом и параллельным выходом, может быть реализован, например, на базе стандартных микросхем серии 561ПР1 или серии 1564ИР8.
Предлагаемый способ поиска сигнала в области многолучевости заключается в следующем:
- Формируют комплексные корреляционные отклики пилот сигнала, определяя корреляцию входного сигнала с опорным сигналом, соответствующим заданным дискретным временным позициям (задержкам) в области многолучевости (сдвинутым на дискрет времени поиска в пределах области многолучевости).
- Определяют значения решающей функции для заданных дискретных временных задержек области многолучевости, суммируя квадраты синфазной и квадратурной частей соответствующих комплексных корреляционных откликов пилот сигнала.
- Сравнивают значения сформированной решающей функции с заданным порогом h.
- Формируют совокупность значений решающей функции, превысивших порог, и совокупность соответствующих им временных задержек.
- Поэтапно формируют оценки поиска временных задержек компонент многолучевого сигнала. При этом на каждом этапе получают оценку одной компоненты, для чего:
- определяют элемент с максимальным значением из совокупности значений решающей функции текущего этапа, при этом совокупностью значений решающей функции первого этапа является сформированная совокупность значений решающей функции,
- сравнивают максимальное значение решающей функции текущего этапа с порогом h,
- в случае непревышения порога формирование оценки поиска временных задержек компонент многолучевого сигнала прекращают,
- в случае превышения порога:
временную задержку, соответствующую элементу с максимальным значением решающей функции текущего этапа, считают оценкой поиска временной задержки компоненты многолучевого сигнала,
производят коррекцию элементов совокупности значений решающей функции текущего этапа,
формируют совокупность значений решающей функции последующего этапа, исключая из скорректированной совокупности значений решающей функции текущего этапа элемент с максимальным значением.
Дискрет времени поиска выбирается, например, равным половине чипа ПСП.
Порог h выбирают, например, пропорциональным мощности шума.
Коррекцию элементов совокупности значений решающей функции текущего этапа производят, например, вычитая корректирующую величину из элементов совокупности, временные задержки которых отличаются от временной задержки максимального элемента не более чем на заданный временной порог η.
Корректирующая величина выбирается, например, пропорциональной максимальному элементу и обратно пропорциональной модулю разности временных задержек максимального и корректируемого элемента совокупности значений решающей функции текущего этапа.
Временной порог η выбирается, например, равным двум дискретам времени поиска.
Для реализации предлагаемого способа поиска сигнала в области многолучевости используется устройство, представленное на фиг.9, где обозначено:
16-1 - 16-К - квадратурные корреляторы,
17 - генератор ПСП,
18 - схема формирования порога,
19 - схема управления,
20 - мультиплексор,
64 - схема обнаружения лучей,
65, 73, 76 - первый, второй, третий ключи,
66, 83 - первый и второй компараторы,
67 - логический узел,
68 - счетчик,
69 - узел управления,
70 - схема ИЛИ,
71 - элемент памяти исходной совокупности решающих функций,
72 - узел определения максимального элемента,
74 – регистр памяти решающих функций поиска,
75 - элемент памяти исходной совокупности временных задержек,
77 – регистр памяти оценок поиска временных задержек,
78, 82 - первый и второй вычитатели,
79 - формирователь модуля,
80 - регистр,
81 - формирователь сигнала коррекции.
Устройство, реализующее способ поиска, содержит К квадратурных корреляторов 16-1 - 16-К, первые и вторые входы которых объединены с первым и вторым входами схемы формирования порога 18 и являются сигнальными входами устройства. Третий вход каждого квадратурного коррелятора 16-1 - 16-K является входом сигнала ПСП и соединен с соответствующим ему выходом генератора ПСП 17.
Четвертый вход каждого квадратурного коррелятора 16-1 - 16-К, который является входом управляющего сигнала, соединен с соответствующим ему первым выходом схемы управления 19. Второй выход схемы управления 19, который является выходом временных сдвигов генератора ПСП 17, соединен со входом генератора ПСП 17 и вторым входом схемы обнаружения лучей 64. Выход каждого квадратурного коррелятора 16-1 - 16-K, который является выходом значений решающей функции для заданных временных задержек области многолучевости, соединен с соответствующим входом мультиплексора 20.
Выход мультиплексора 20, который является выходом значений решающей функции из области многолучевости, соединен с первым входом схемы обнаружения лучей 64.
Выход схемы формирования порога 18, который является выходом значения порога h, соединен с третьим входом схемы обнаружения лучей 64 и первым входом первого компаратора 66.
Вход схемы управления 19, который является входом управляющих сигналов, соединен с первым выходом блока управления 11.
Первый выход схемы обнаружения лучей 64, который является выходом временных задержек, соединен со вторым выходом элемента памяти исходной совокупности временных задержек 75. Второй выход схемы обнаружения лучей 64, который является выходом значений решающих функций, превысивших порог, соединен со вторым входом элемента памяти исходной совокупности решающих функций 71. Третий выход схемы обнаружения лучей 64, который является выходом сигнала, равного числу обнаруженных компонент, превысивших порог, соединен с первым входом узла управления 69. Четвертый выход схемы обнаружения лучей 64, который является выходом сигнала индикации превышения порога для заданной дискретной временной задержки, соединен со вторым входом узла управления 69. Первый выход узла управления 69, который является выходом сигнала записи, соединен с первым входом элемента памяти исходной совокупности решающих функций 71 и с первым входом элемента памяти исходной совокупности временных задержек 75. Выход элемента памяти исходной совокупности решающих функций 71, который является выходом решающей функции текущего этапа, соединен с первым входом узла определения максимального элемента 72, с первым входом вычитателя 82, с первыми входами первого ключа 65 и второго ключа 73. Второй вход узла определения максимального элемента 72 является входом управления и соединен с пятым выходом узла управления 69. Выход узла определения максимального элемента 72, который является выходом адреса выбранного максимального элемента, соединен с пятым входом узла управления 69.
Второй выход узла управления 69, который является выходом сигнала индикации наличия максимума, соединен со вторым входом ключа 65 и первым входом логического узла 67. Выход ключа 65 соединен со вторым входом первого компаратора 66. Выход компаратора 66, который является выходом превышения порога, соединен со вторым входом логического узла 67, первым входом счетчика 68, со вторыми управляемыми входами второго 73 и третьего 76 ключей и с первым входом регистра 80.
Третий выход узла управления 69, который является выходом числа обнаруженных компонент текущего периода поиска, соединен со вторым входом счетчика 68. Выход счетчика 68 соединен с первым входом схемы ИЛИ 70, второй вход которой соединен с выходом логического узла 67. Выход схемы ИЛИ 70, который является выходом индикатора окончания процедуры поиска, соединен с третьим входом узла управления 69.
Четвертый выход узла управления 69, который является выходом управляющего сигнала формирования оценки поиска, соединен с первым входом регистра памяти решающих функций поиска 74, с первым входом регистра памяти оценки поиска временных задержек 77 и с третьим входом формирователя сигнала коррекции 81. Второй вход регистра памяти решающих функций поиска 74 и первый вход формирователя сигнала коррекции 81 объединены и соединены с выходом второго ключа 73, который является выходом максимальной решающей функции текущего этапа. Вторые входы регистра памяти оценки поиска временных задержек 77 и регистра 80 объединены и соединены с выходом третьего ключа 76, первый вход которого объединен с первым входом первого вычитателя 78 и соединен с выходом элемента памяти исходной совокупности временных задержек 75, который является выходом значения временной задержки, соответствующей максимальному элементу. Выход регистра 80, который является выходом значений временной задержки, соединен со вторым входом первого вычитателя 78. Выход первого вычитателя 78, который является выходом разности временных задержек, соединен со входом формирователя модуля 79. Выход модуля сигнала разности формирователя модуля 79 соединен со вторым входом формирователя сигнала коррекции 81 и первым входом второго компаратора 83. Второй вход компаратора 83 является пороговым входом. Выход второго компаратора 83 является выходом превышения порога и соединен с четвертым входом узла управления 69 и с четвертым входом формирователя сигнала коррекции 81. Выход формирователя сигнала коррекции 81, являющийся выходом сигнала коррекции, соединен со вторым входом второго вычитателя 82, выход которого соединен со вторым входом элемента памяти исходной совокупности решающих функций 71. Выход регистра памяти оценки поиска временных задержек и выход регистра памяти решающих функций поиска объединены и являются выходом блока поиска 12.
Предлагаемое устройство поиска сигнала 12 работает следующим образом.
Из совокупности значений решающей функции поиска, превысивших порог, формируется совокупность оценки поиска значений решающей функции компонент многолучевого сигнала и совокупность соответствующих им временных задержек.
При формировании оценки поиска временных позиций (задержек) компонент многолучевого сигнала учитывается влияние боковых выбросов корреляционных откликов сигналов лучей друг на друга.
Синфазная и квадратурная составляющие входного комплексного сигнала поступают соответственно на первый и второй входы К параллельных квадратурных корреляторов 16-1 - 16-К и на первый и второй входы схемы формирования порога 18. На третий вход квадратурных корреляторов 16-1 - 16-K с соответствующих выходов генератора ПСП 17 поступает опорный сигнал, сдвинутый на дискрет времени поиска в пределах области многолучевости, например, равный половине чипа ПСП. Временные сдвиги опорных сигналов генератора ПСП 17 задают сигналом временных сдвигов генератора ПСП, который поступает со второго выхода схемы управления 19 на вход генератора ПСП 17 и на второй вход схемы обнаружения лучей 64. На четвертый вход каждого квадратурного коррелятора 16-1 - 16-K с соответствующего ему первого выхода схемы управления 19 поступает управляющий сигнал, например сигнал сброса.
В каждом квадратурном корреляторе 16-1 - 16-K входной сигнал перемножают на опорный сигнал, результаты перемножения накапливают и в пределах области многолучевости формируют корреляционные отклики синфазных и квадратурных составляющих пилот сигнала, формируют квадраты синфазной и квадратурной частей соответствующих комплексных корреляционных откликов пилот сигнала. Суммируя квадраты синфазной и квадратурной частей соответствующих комплексных корреляционных откликов, определяют значения решающей функции в заданных дискретных временных позициях области многолучевости, которые поступают на вход мультиплексора 20.
С выхода мультиплексора 20 значения решающей функции в заданных дискретных временных позициях области многолучевости поступают на первый вход схемы обнаружения лучей 64.
По управляющему сигналу с выхода блока управления 11 схема управления 19 осуществляет временной сдвиг генератора ПСП 17 в пределах области многолучевости и обнуляет сумматоры квадратурных корреляторов 16-1 - 16-K.
По входному сигналу схема формирования порога 18 формирует порог h, который выбирают, например, пропорционально оценке мощности шума и подают на третий вход схемы обнаружения лучей 64 и на первый вход компаратора 66.
В схеме обнаружения лучей 64 значения решающей функции для заданных дискретных временных задержек области многолучевости сравнивают с порогом h и формируют значения решающей функции, превысившие порог h, и соответствующие им временные позиции, сигнал, соответствующий числу обнаруженных компонент N, превысивших порог, и сигнал индикации превышения порога h в заданной дискретной временной позиции.
Значения решающей функции, превысившие порог h, и соответствующие им временные позиции со второго и первого выхода схемы обнаружения лучей 64 поступают соответственно на второй вход элемента памяти исходной совокупности решающих функций 71 и на второй вход элемента памяти исходной совокупности временных задержек 75. На первый вход узла управления 69 с третьего выхода схемы обнаружения лучей 64 и на второй вход узла управления 69 с четвертого выхода схемы обнаружения лучей 64 поступают соответственно сигнал, равный числу обнаруженных компонент N, превысивших порог, и сигнал индикации превышения порога h в заданной дискретной временной позиции.
По сигналу индикации превышения порога h на первом выходе узла управления 69 формируют сигнал записи, который поступает на первый вход элемента памяти исходной совокупности решающих функций 71 и на первый вход элемента памяти исходной совокупности временных задержек 75. По этому сигналу значения решающей функции, превысившие порог h, и соответствующие им временные позиции записывают соответственно в элементы памяти исходной совокупности решающих функций 71 и элемента памяти исходной совокупности временных задержек 75 и формируют исходную совокупность значений решающей функции, превысивших порог h, и исходную совокупность соответствующих им временных позиций (задержек) текущего периода поиска.
Используя исходные совокупности, поэтапно для каждого периода поиска формируют оценки поиска временных задержек компонент многолучевого сигнала. При этом на каждом этапе получают оценку одной компоненты.
Исходной совокупностью значений решающей функции первого этапа является сформированная совокупность значений решающей функции.
Для каждого текущего этапа по команде считывания с узла управления 69 с выхода элемента памяти исходной совокупности решающих функций 71 поэлементно считывают исходную совокупность решающих функций и подают на первый вход узла определения максимального элемента 72, на первый вход вычитателя 82, на первый вход ключа 73 и на первый вход ключа 65.
В узле определения максимального элемента 72 по сигналам управления, поступающим на его второй вход с пятого выхода узла управления 69, выбирают элемент совокупности значений текущего этапа, который имеет максимальное значение решающей функции. В качестве узла определения максимального элемента 72 может быть использован, например, узел выбора 43, описанный ранее. Для определения максимального элемента для узла 72 в узле управления 69 формируют сигналы управления такие же, как для узла выбора 43 блока обновления компонент сигналов 21, за исключением сигнала, соответствующего числу наибольших элементов. В данном случае число наибольших элементов совокупности решающих функций равно единице (L=1).
При такой реализации в узле определения максимального элемента 72 формируют адрес элемента совокупности в элементе памяти исходной совокупности решающих функций 71, который имеет максимальное значение решающей функции. Адрес выбранного максимального элемента с выхода узла определения максимального элемента 72 поступает на пятый вход узла управления 69, который с его первого выхода передают на первые входы элемента памяти исходной совокупности решающих функций 71 и на первые входы элемента памяти исходной совокупности временных задержек 75.
Из ячейки памяти элемента исходной совокупности решающих функций 71 с адресом значения максимальной решающей функции на первый вход ключа 73 и на первый вход ключа 65 считывают значение максимальной решающей функции текущего этапа, а из ячейки памяти с соответствующим адресом элемента памяти исходной совокупности временных задержек 75 на первый вход вычитателя 78 и на первый вход ключа 76 считывают временную позицию, соответствующую значению максимальной решающей функции.
На второй вход ключа 65 и на первый вход логического узла 67 со второго выхода узла управления 69 поступает сигнал индикации наличия максимума, равный, например, логической единице. По этому сигналу максимальное значение решающей функции текущего этапа с первого входа ключа 65 поступает на второй вход компаратора 66, в котором сравнивается с порогом h.
По результату сравнения в компараторе 66 формируют сигнал управления (превышения порога h). Этот сигнал с выхода компаратора 66 поступает на первый вход счетчика 68, на второй вход логического узла 67, на вторые управляемые входы ключа 73 и 76 и на первый вход записи регистра 80. На второй вход счетчика 68 с третьего выхода узла управления 69 поступает сигнал, соответствующий числу обнаруженных компонент N многолучевого сигнала текущего периода поиска.
Если максимальный элемент совокупности текущего этапа не превышает порог h, то в компараторе 66 вырабатывают сигнал управления, равный, например, логическому нулю. По этому сигналу ключи 73 и 76 закрывают, регистр 80 обнуляют. По сигналу управления с компаратора 66 и по сигналу индикации наличия максимума со второго выхода узла управления 69 на выходе логического узла 67 формируют сигнал, равный логической единице, который поступает на второй вход схемы ИЛИ 70, на первый вход которой поступает сигнал с выхода счетчика 68. В этом случае независимо от сигнала с выхода счетчика 68 выходной сигнал схемы ИЛИ 70 равен логической единице и поступает на третий вход узла управления 69, по которому в нем формируют сигналы управления. Сформированные сигналы управления поступают с четвертого выхода узла управления 69 на первые входы регистра памяти решающих функций поиска 74 и на первые входы регистра памяти оценки поиска временных задержек 77 и с первого выхода узла управления 69 на первые входы элемента памяти исходной совокупности решающих функций 71 и элемента памяти исходной совокупности временных задержек 75. По этим сигналам формирование оценки поиска временных задержек компонент многолучевого сигнала прекращают и содержимое регистров памяти 74, 77 считывают в блок формирования мягких решений 15 и в блок обновления компонент сигнала 21.
Если максимальный элемент совокупности текущего этапа превышает порог h, то в компараторе 66 вырабатывают сигнал управления, равный логической единице. По этому сигналу максимальный элемент исходной совокупности через ключ 73 поступает на второй вход регистра памяти решающих функций поиска 74 и на первый вход формирователя сигнала коррекции 81, а значение соответствующей временной задержки поступает через ключ 76 на второй вход регистра памяти временных задержек оценки поиска 77 и на второй вход регистра 80, в которых запоминаются. Значение временной задержки, соответствующей максимальному элементу, считывают с выхода регистра 80 на второй вход вычитателя 78.
Временную позицию (задержку), соответствующую элементу с максимальным значением решающей функции, считают оценкой поиска временной задержки компоненты многолучевого сигнала. Для следующего этапа производят коррекцию элементов совокупности значений решающей функции текущего этапа.
На выходе логического узла 67 по сигналу с компаратора 66 (равному логической единице) и сигналу индикации наличия максимума с узла управления 69 формируют сигнал, равный логическому нулю, который поступает на второй вход схемы ИЛИ 70, на первый вход которой поступает сигнал с выхода счетчика 68.
Счетчик 68 суммирует число превышений порога h в компараторе 66 и при накоплении суммарного значения, равного числу обнаруженных компонент N, вырабатывает сигнал, равный логической единице, который соответствует просмотру всех элементов исходной совокупности текущего периода. В противном случае сигнал на выходе счетчика 68 равен логическому нулю. По сигналу, равному логической единице, формирование оценки поиска временных задержек компонент многолучевого сигнала прекращают и содержимое регистров памяти 74, 77 считывают в блок формирования мягких решений 15 и блок обновления компонент сигнала 21.
По сигналу управления с первого выхода узла управления 69 поэлементно считывают значения решающей функции с элемента памяти исходной совокупности решающих функций 71 на первый вход вычитателя 82 и соответствующие временные задержки с элемента памяти исходной совокупности временных задержек 75 на первый вход вычитателя 78.
На выходе вычитателя 78 формируют разность между временными позициями каждого элемента совокупности текущего этапа и временной позицией максимального элемента. Сигнал разности для каждого элемента совокупности текущего этапа поступает на вход формирователя модуля 79. С выхода формирователя 79 модуль сигнала разности поступает на первый вход второго компаратора 83 и на второй вход формирователя сигнала коррекции 81. На второй вход компаратора 83 подают временной порог η, который выбирают, например, равным двум дискретам времени поиска. Если модуль сигнала разности не больше порога η, то на выходе компаратора 83 формируют сигнал управления, например, сигнал, равный логической единице, который поступает на четвертый вход узла управления 69 и на четвертый вход формирователя сигнала коррекции 81. По этому сигналу в узле 69 формируют сигнал считывания и сигнал записи, которые соответственно поступают с четвертого выхода узла 69 на третий вход формирователя сигнала коррекции 81 и с первого выхода узла 69 на первый вход элемента памяти исходной совокупности решающих функций 71.
По сигналу управления и сигналу считывания в формирователе сигнала коррекции 81 формируют корректирующую величину (сигнал коррекции).
Корректирующую величину выбирают, например, пропорционально значению максимального элемента и обратно пропорционально модулю разности временных позиций максимального и корректируемого элемента совокупности значений решающей функции текущего этапа.
Коррекцию элементов совокупности значений решающей функции текущего этапа производят, например, вычитая корректирующую величину из соответствующего элемента совокупности.
Корректирующая величина (сигнал коррекции) с выхода формирователя сигнала коррекции 81 поступает на второй вход вычитателя 82, в котором проводят коррекцию значения решающей функции элемента совокупности текущего этапа. Скорректированное значение поступает на второй вход элемента памяти исходной совокупности решающих функций 71.
По сигналу записи скорректированное значение решающей функции элемента совокупности записывают в элемент памяти исходной совокупности решающих функций 71 по адресу корректируемого элемента совокупности.
Если модуль сигнала разности больше порога η, то коррекцию соответствующего элемента совокупности значений решающей функции текущего этапа не производят.
По окончании анализа всех элементов совокупности значений решающей функции текущего этапа значение максимального элемента в элементе памяти исходной совокупности решающих функций 71 обнуляют.
Таким образом на каждом текущем этапе формируют совокупность значений решающей функции и соответствующих им временных задержек для анализа на последующем этапе.
Вариант выполнения схемы обнаружения лучей 64 представлен на фиг.10.
Работает схема обнаружения лучей следующим образом.
В компараторе 84 сравнивают значения решающей функции в заданных дискретных временных позициях области многолучевости, поступающие с выхода мультиплексора 20, со значением порога h, поступающим со схемы формирования порога 18, и формируют сигнал индикации превышения порога h в заданной дискретной временной позиции. Этот сигнал поступает на узел управления 69 и используется как сигнал записи. При превышении порога значения решающей функции через ключ 86 поступают на второй вход элемента памяти исходной совокупности решающих функций 71, а соответствующие им временные позиции (задержки) со схемы управления 19 через ключ 87 поступают на второй вход элемента памяти исходной совокупности временных задержек 75.
В сумматоре 85 осуществляют накопление числа фактов превышения порога h и формируют сигнал, соответствующий числу обнаруженных компонент N, который поступает на первый вход узла управления 69.
Вариант выполнения формирователя сигнала коррекции 85 представлен на фиг.11.
Предлагаемый формирователь сигнала коррекции работает следующим образом.
По сигналу управления с узла управления 69 значение решающей функции максимального элемента совокупности текущего этапа записывают с выхода ключа 73 в регистр 88, а сигналы модуля разности временных задержек максимального элемента и анализируемого элемента совокупности последовательно записывают с выхода формирователя модуля 79 в регистр 92. Эти сигналы считывают с выходов регистров 88, 92 на входы формирователя отношения 89, в котором последовательно формируют отношения значений решающей функции максимального элемента совокупности текущего этапа к сигналу модуля разности временных задержек максимального элемента и анализируемого элемента совокупности. Сигнал отношения масштабируют в перемножителе 90 путем умножения на коэффициент α, выбранный, например, по результатам моделирования на ЭВМ. По сигналу с компаратора 83, равному логической единице для элементов совокупности, временные позиции которых отличаются от временной позиции максимального элемента не более, чем на заданный временной порог η, выходной сигнал перемножителя 90 через ключ 91 поступает на вычитатель 82.
Вариант выполнения логического узла 67 представлен на фиг.12.
Стандартные логический элемент И 93 и элемент НЕ 94 включены в логический узел 67 таким образом, что по сигналам с узла управления 69 и с компаратора 66 формируется сигнал управления на прекращение (логическая единица) или продолжение (логический ноль) процедуры формирования оценки поиска временных задержек компонент многолучевого сигнала.
Регистры памяти 74, 77 могут быть реализованы на базе регистра с последовательным входом и параллельным выходом, например, на стандартных микросхемах серии 561ПР1 или серии 1564ИР8.
Счетчик 68 может быть реализован, например, на базе стандартного программируемого счетчика серии 564ИЕ10 и др.
Узел управления 69 может быть реализован различным образом, например, на современных микропроцессорах цифровой обработки сигналов (DSP) - TMS320Cxx, Motorola 56xxx, Intel и т.п.
Предлагаемый способ формирования мягких решений при приеме многолучевого сигнала заключается в следующем.
- Осуществляют отбор компонент многолучевого сигнала, для чего:
- производят оценку мощности компонент многолучевого сигнала;
- выполняют ранжирование компонент многолучевого сигнала по убыванию их мощности;
- последовательно для всех ранжированных компонент многолучевого сигнала, кроме первой;
формируют отношение мощности компоненты к сумме мощностей всех предыдущих ранжированных компонент;
сравнивают сформированное отношение с заданным порогом ν;
в случае превышения порога компоненту отбирают для формирования мягких решений;
в случае непревышения порога процедуру отбора компонент завершают.
- Формируют последовательность корреляционных откликов информационных символов для каждой отобранной компоненты многолучевого сигнала.
- Осуществляют взвешенное суммирование корреляционных откликов информационных символов всех отобранных компонент многолучевого сигнала, получая объединенные мягкие решения об информационных символах.
Порог ν выбирают, например, по допустимым энергетическим потерям из-за ограничения используемых при демодуляции компонент, например при потерях 0,1 дБ ν=0,03.
Корреляционные отклики информационных символов для каждой отобранной компоненты многолучевого сигнала формируют, например, определяя корреляцию входного сигнала с известной ПСП на интервалах длительности символов.
Весовые коэффициенты при суммировании корреляционных откликов информационных символов отобранных компонент многолучевого сигнала выбирают, например, как комплексно сопряженные оценки комплексной огибающей информационных символов компонент многолучевого сигнала.
Для реализации способа формирования мягких решений предлагается устройство, представленное на фиг.13, где обозначено:
13 - многоканальный приемник данных,
14 - схема объединения мягких решений,
95 - регистр памяти,
96, 103, 109 - первый, второй, третий мультиплексоры,
97, 102 - первый и второй компараторы,
98 - схема ИЛИ,
99 - счетчик,
100 - схема НЕ,
101 - ключ,
104, 106, 110 - первый, второй и третий узел памяти,
105 - сумматор,
107 - формирователь отношения,
108 - узел оценки мощности,
111 - узел ранжирования,
112 - узел управления.
Устройство формирования мягких решений содержит многоканальный приемник данных 13, первый и второй входы которого являются входами синфазной и квадратурной составляющих компонент входного сигнала и первым и вторым входами устройства. Третий вход устройства является входами временных задержек и первыми входами второго мультиплексора 103. Четвертый вход устройства является входом значений решающей функции поиска текущего этапа и первым входом первого мультиплексора 96. Выход многоканального приемника данных 13 соединен со входом схемы объединения мягких решений 14, который является входом последовательности корреляционных откликов информационных и пилот символов компонент многолучевого сигнала, и со входом узла оценки мощности 108, который является входом последовательности корреляционных откликов пилот символов компонент многолучевого сигнала. Кроме того, выход многоканального приемника данных 13 является выходом последовательности корреляционных откликов пилот символов и временных задержек компонент многолучевого сигнала и вторым выходом устройства. Первым выходом устройства является выход объединенных мягких решений схемы объединения мягких решений 14. Вторые входы первого мультиплексора 96 и второго мультиплексора 103 являются управляющими и соединены с первым выходом узла управления 112. Выход узла оценки мощности 108, который является выходом оценки мощности компонент многолучевого сигнала (решающей функции поиска), соединен с первым входом третьего мультиплексора 109. Выход первого мультиплексора 96 объединен с выходом третьего мультиплексора 109, который является выходом сигнала оценки мощности компонент, и соединен с первым входом третьего узла памяти 110. Выход второго мультиплексора 103, который является выходом временных задержек обновленных компонент многолучевого сигнала, соединен с первым входом первого узла памяти 104, второй вход которого объединен со вторым входом третьего мультиплексора 109 и соединен со вторым управляющим выходом узла управления 112. Третий выход узла управления 112 является выходом сигналов управления и соединен со вторым входом третьего узла памяти 110, первым входом первого компаратора 97 и первым входом регистра памяти 95. Выход третьего узла памяти 110, который является выходом оценки мощности текущей компоненты, соединен с первым входом узла ранжирования 111, первым входом сумматора 105 и первым входом формирователя отношения 107, в котором формируются отношения мощности текущей компоненты к сумме мощностей всех предыдущих ранжированных компонент. Выход узла ранжирования 111, который является выходом упорядоченных адресов ячеек памяти, соединен с первым входом узла управления 112. Второй вход узла ранжирования 111 соединен с четвертым управляющим выходом узла управления 112. Пятый выход узла управления 112, который является выходом сигнала записи, соединен со вторым входом второго узла памяти 106, первый вход которого соединен с выходом сумматора 105. Выход второго узла памяти 106, который является выходом суммарных мощностей всех предыдущих ранжированных компонент, соединен со вторым входом сумматора 105 и вторым входом формирователя отношения 107. Выход формирователя отношения мощности 107 соединен с первым входом второго компаратора 102, второй вход которого является входом значения порога ν. Выход второго компаратора 102, который является выходом сигнала сравнения сформированного отношения мощности текущей компоненты к сумме мощностей всех предыдущих ранжированных компонент с заданным порогом ν, соединен со входом схемы НЕ 100, со входом счетчика 99 и с первым входом ключа 101. Второй вход ключа 101 соединен с выходом первого узла памяти 104. Выход ключа 101, который является выходом временной задержки компоненты многолучевого сигнала, соединен со вторым входом регистра памяти 95. Выход регистра памяти 95, который является выходом совокупности временных задержек отобранных компонент, соединен с третьим входом многоканального приемника данных 13. Выход схемы НЕ 100 является инверсным выходом и соединен с первым входом схемы ИЛИ 98. Выход счетчика 99, который является выходом сигнала, равного числу превышений порога ν, соединен со вторым входом первого компаратора 97. Выход первого компаратора 97 соединен со вторым входом схемы ИЛИ 98, выход которой является выходом сигнала индикации завершения процедуры отбора компонент для формирования мягких решений и соединен со вторым входом узла управления 112.
Устройство формирования мягких решений работает следующим образом.
В предлагаемом устройстве для формирования мягких решений (демодуляции) информационного сигнала текущего периода предварительно осуществляют отбор компонент многолучевого сигнала. Процедуру отбора выполняют из ранжированной по убыванию мощности совокупности компонент многолучевого сигнала, обнаруженных в блоке поиска 12, и компонент, обрабатываемых в схеме объединения мягких решений 14. Процедуру отбора осуществляют для каждого периода поиска.
В качестве критерия отбора компонент многолучевого сигнала, которые используют при формировании мягких решений, принимают факт превышения некоторого заданного порогового значения величиной, равной отношению мощности исследуемой компоненты к суммарной мощности всех предыдущих компонент, ранжированных по убыванию их мощности.
На первый и второй вход многоканального приемника данных 13 поступает соответственно синфазная и квадратурная составляющая компонент входного многолучевого сигнала. С выходов блока управления 11 на первые входы мультиплексора 103 поступают временные задержки обновленных компонент многолучевого сигнала текущего периода.
С первого выхода блока поиска 12 на первый вход мультиплексора 96 поступают значения решающей функции поиска текущего периода, эквивалентные мощности соответствующих компонент. С выхода многоканального приемника данных 13 на вход узла оценки мощности 108 поступает последовательность корреляционных откликов пилот символов уточненных компонент многолучевого сигнала, на вход схемы объединения мягких решений 14 поступают последовательности корреляционных откликов информационных и пилот символов уточненных компонент многолучевого сигнала, на блок обновления сигналов 21 поступает последовательность корреляционных откликов пилот символов и временные задержки уточненных компонент многолучевого сигнала.
Многоканальный приемник данных 13 предлагаемого устройства может быть реализован аналогично многоканальному приемнику данных прототипа. Временные задержки уточненных компонент многолучевого сигнала в устройстве прототипа формируют в схемах слежения за задержкой приемников данных, выходной сигнал которых может использоваться в предлагаемом устройстве.
В узле оценки мощности 108 по корреляционным откликам пилот символов уточненных компонент многолучевого сигнала формируют оценку мощности (решающую функцию поиска) уточненных компонент многолучевого сигнала. Сформированный сигнал оценки мощности компонент поступает с выхода узла оценки мощности 108 на первый вход мультиплексора 109. В качестве узла оценки мощности 108 может быть использован, например, узел оценки мощности 40, описанный ранее.
По сигналам управления, поступающим с первого выхода узла управления 112 на вторые входы мультиплексоров 96 и 103, входные сигналы мультиплексоров поэлементно поступают соответственно на первый вход узла памяти 110 и на первый вход узла памяти 104.
По сигналу записи, поступающему со второго выхода узла управления 112 на второй вход узла памяти 104, временные задержки обновленных компонент многолучевого сигнала текущего периода и оценки поиска временных задержек компонент многолучевого сигнала с выхода мультиплексора 103 записывают в память.
По сигналу управления, поступающему со второго выхода узла управления 112 на второй вход мультиплексора 109, сигнал оценки мощности уточненных компонент через мультиплексор 109 поэлементно поступает на первый вход узла памяти 110.
По сигналу записи с третьего выхода узла управления 112, который поступает на второй вход узла памяти 110 оценки мощности компонент записывают в память.
Таким образом в узел памяти 104 запоминают временные задержки обновленных компонент многолучевого сигнала текущего периода, а в узел памяти 110 запоминают соответствующие значения оценок мощности компонент многолучевого сигнала текущего периода. При этом временные задержки и соответствующие им значения оценок мощности компонент запоминают в ячейках памяти узлов 104 и 110 по одинаковым адресам.
По сигналу считывания, поступающему с третьего выхода узла управления 112 на второй вход узла памяти 110, осуществляют считывание оценок мощности обновленных компонент многолучевого сигнала текущего периода, которые с выхода узла памяти 110 поступают на первый вход узла ранжирования 111.
В узле ранжирования 111 по командам управления, поступающим с четвертого выхода узла управления 112 на второй вход узла 111, адреса ячеек памяти упорядочивают таким образом, чтобы размещенные в них оценки мощности компонент располагались в порядке убывания. Упорядоченные адреса ячеек памяти поступают с выхода узла ранжирования 111 на первый вход узла управления 112.
В качестве узла ранжирования 111 может быть использован, например, узел выбора 43, описанный ранее. При этом в узле управления 112 для узла ранжирования 110 формируют сигналы управления такие же, как для узла выбора 43 блока обновления компонент сигнала 21, за исключением сигнала, соответствующего числу наибольших элементов. В данном случае число наибольших элементов совокупности равно N (т.е. L=N).
Из ячеек памяти узла 110, расположенных по адресам, которые поступают с третьего выхода узла управления 112 на второй вход узла памяти 110, поэлементно считывают оценки мощности компонент многолучевого сигнала в порядке их убывания. Считанные оценки мощности компонент с выхода узла памяти 110 поступают на первый вход сумматора 105 и на первый вход формирователя отношения 107. Одновременно из ячеек памяти узла памяти 104, расположенных по адресам, которые поступают со второго выхода узла управления 112 на второй вход узла памяти 104, поэлементно считывают соответствующие временные задержки компонент многолучевого сигнала, которые с выхода узла памяти 104 поступают на второй вход ключа 101.
По сигналу считывания, который поступает с пятого выхода узла управления 112 на второй вход узла памяти 106, на второй вход сумматора 105 и на второй вход формирователя отношения 107 с выхода узла памяти 106 поступает сигнал, равный сумме мощностей всех предыдущих ранжированных компонент совокупности.
В сумматоре 105 осуществляют суммирование мощности текущей компоненты с суммарной мощностью всех предыдущих ранжированных компонент совокупности из узла памяти 106. Результат суммирования с выхода сумматора 105 поступает на первый вход узла памяти 106. По сигналу записи с пятого выхода узла управления 112, поступающему на второй вход узла памяти 106, результат суммирования запоминают.
Таким образом, в сумматоре 105 и узле памяти 106 осуществляют поэлементное накопление (суммирование) значений оценок мощности компонент многолучевого сигнала. При этом для каждого шага анализа на второй вход формирователя отношения 107 с выхода узла памяти 106 поступает текущая сумма значений оценок мощности ранжированных компонент многолучевого сигнала, а на первый вход формирователя отношения 107 с выхода узла памяти 110 поступает значение оценки мощности текущей компоненты.
В формирователе отношения 107 для каждого шага анализа формируют отношение мощности текущей компоненты а к сумме мощностей всех предыдущих ранжированных компонент b.
Полученный сигнал с выхода формирователя отношения 107 поступает на первый вход компаратора 102, на второй вход которого поступает заданный сигнал порога ν.
Порог ν выбирают, например, по допустимым энергетическим потерям из-за ограничения используемых при демодуляции компонент, например при потерях 0,1 дБ, ν=0,03.
В компараторе 102 сравнивают сформированное отношение мощности текущей компоненты к сумме мощностей всех предыдущих ранжированных компонент с заданным порогом ν, и результат сравнения поступает на вход схемы НЕ 100, на вход счетчика 99 и на первый вход ключа 101.
Инверсный сигнал с выхода схемы НЕ 100 поступает на первый вход схемы ИЛИ 98.
В случае превышения порога в компараторе 102 формируют сигнал управления, например, в форме логической единицы. По этому сигналу соответствующая временная задержка компоненты многолучевого сигнала через ключ 101 поступает на второй вход регистра памяти 95. По сигналу записи, который поступает с третьего выхода узла управления 112 на первый вход регистра памяти 95, осуществляют запись временной задержки этой компоненты многолучевого сигнала в регистр памяти 95.
На выходе счетчика 99 для каждого шага анализа формируют сигнал, равный числу превышений порога ν, который поступает на второй вход компаратора 97. На первый вход компаратора 97 с третьего выхода узла управления 112 поступает сигнал, равный числу компонент, записанных в узле памяти 110. По результатам сравнения на выходе компаратора 97 формируют сигнал, равный логической единице, если сигнал, равный числу превышений порога ν не меньше числа компонент, записанных в узле памяти 110 и равный логическому нулю в противном случае. Этот сигнал с выхода компаратора 97 поступает на второй вход схемы ИЛИ 98, на выходе которой формируют сигнал индикации завершения процедуры отбора компонент для формирования мягких решений. Этот сигнал равен логической единице в случае непревышения порога ν или когда число превышений порога ν не меньше числа компонент, записанных в узле памяти 110, и поступает с выхода схемы ИЛИ 98 на второй вход узла управления 112.
По сигналу индикации завершения процедуры отбора компонент для формирования мягких решений в узле управления 112 формируют сигнал считывания, который с третьего выхода узла 112 поступает на первый вход регистра памяти 95. По этому сигналу из регистра памяти 95 считывают совокупность временных задержек отобранных компонент, которая поступает на третий вход многоканального приемника данных 13.
В схеме объединения мягких решений 14 по корреляционным откликам отобранных компонент информационных символов многолучевого сигнала текущего периода осуществляют взвешенное суммирование, получая объединенные мягкие решения об информационных символах отобранных компонент многолучевого сигнала, которые поступают на выход устройства. Веса при взвешенном суммировании корреляционных откликов информационных символов уточенных компонент многолучевого сигнала выбирают, например, как комплексно сопряженные оценки комплексной огибающей информационных символов уточненных компонент многолучевого сигнала, которые поступают на блок объединения мягких решений с выхода многоканального приемника данных 13.
Регистр памяти 95 может быть реализован на базе регистра с последовательным входом и параллельным выходом, например на стандартных микросхемах серии 561ПР1 или серии 1564ИР8.
Узел управления 112 может быть реализован различным образом, например на современных микропроцессорах цифровой обработки сигналов (DSP) - TMS320Cxx, Motorola 56xxx, Intel и т.п.
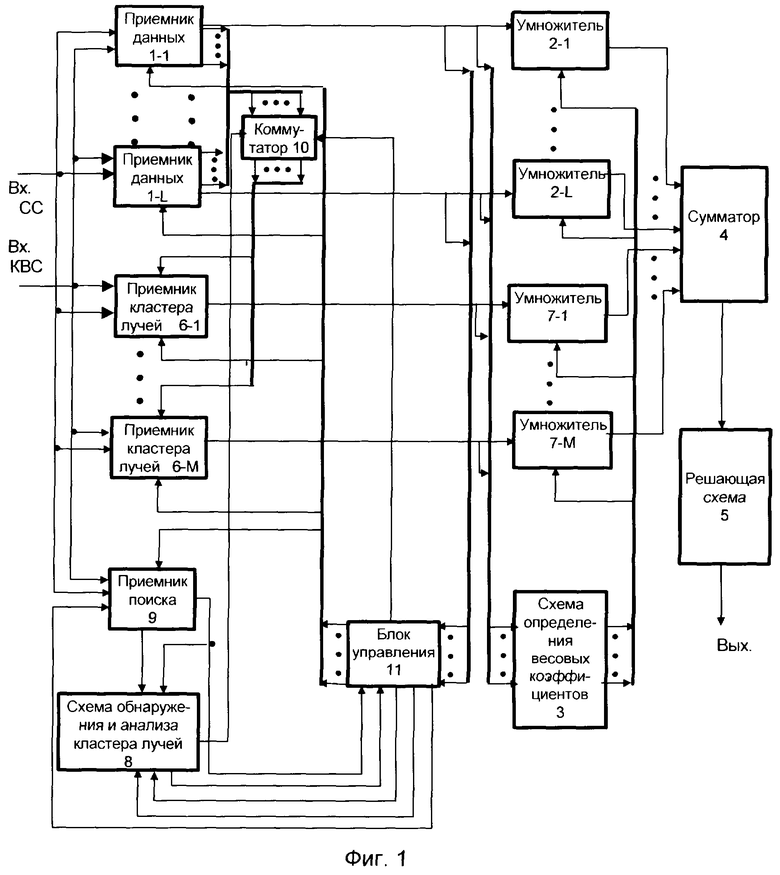
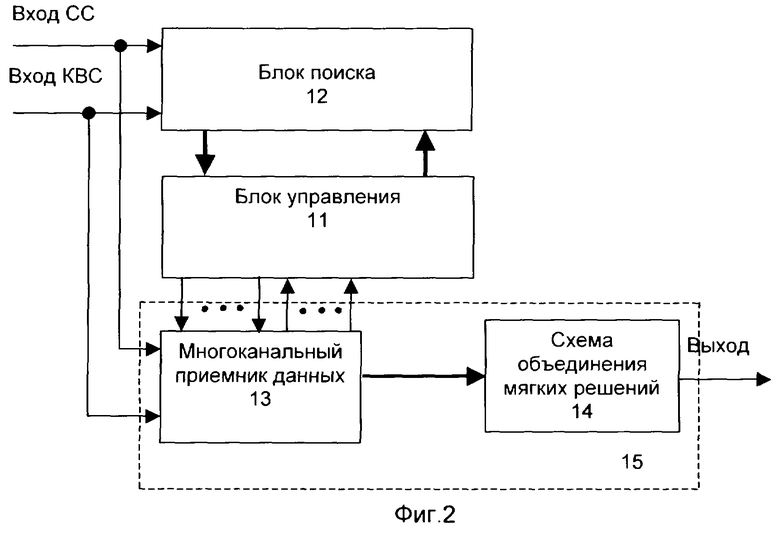
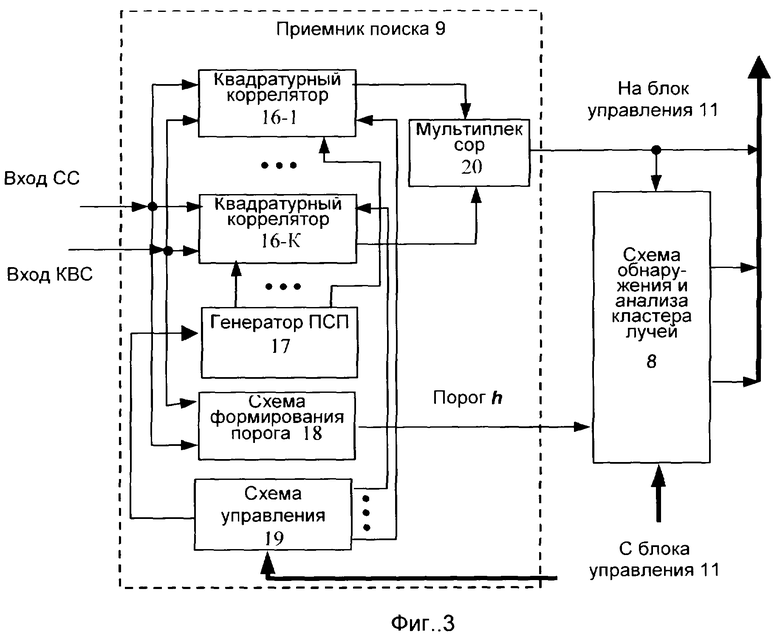
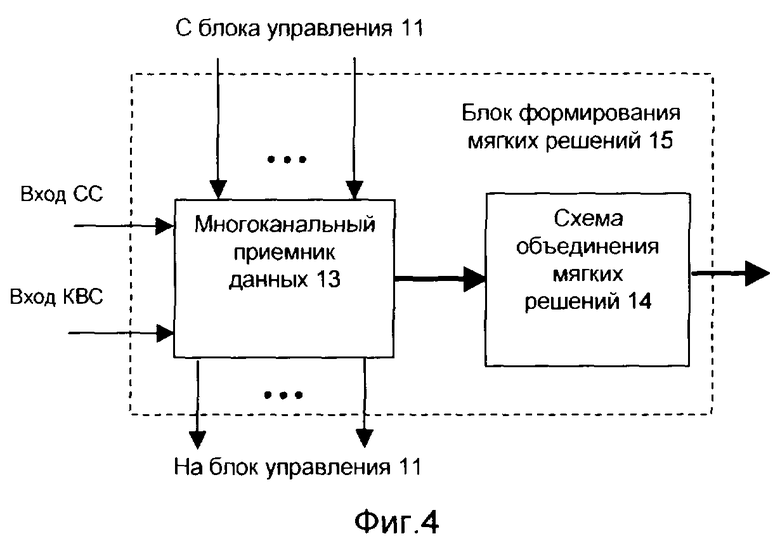


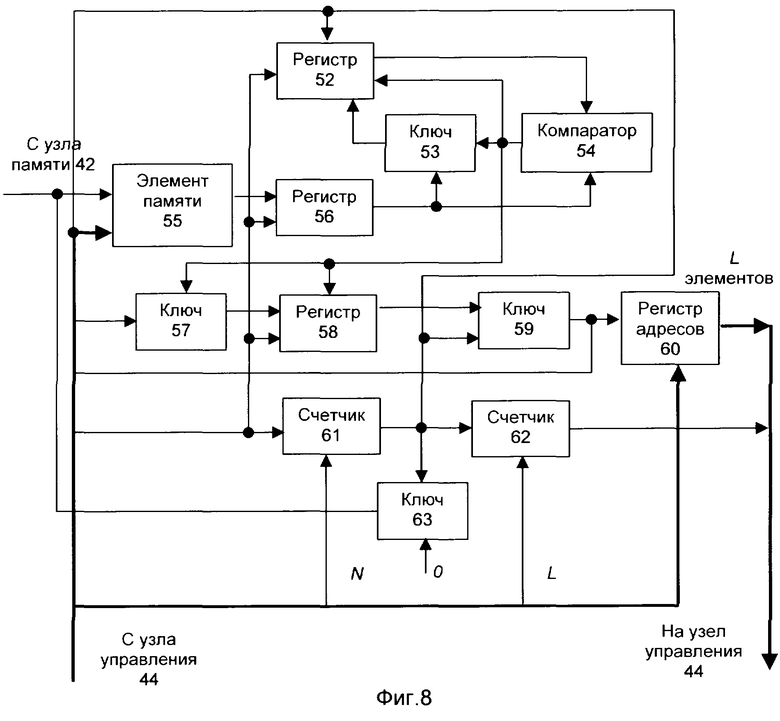

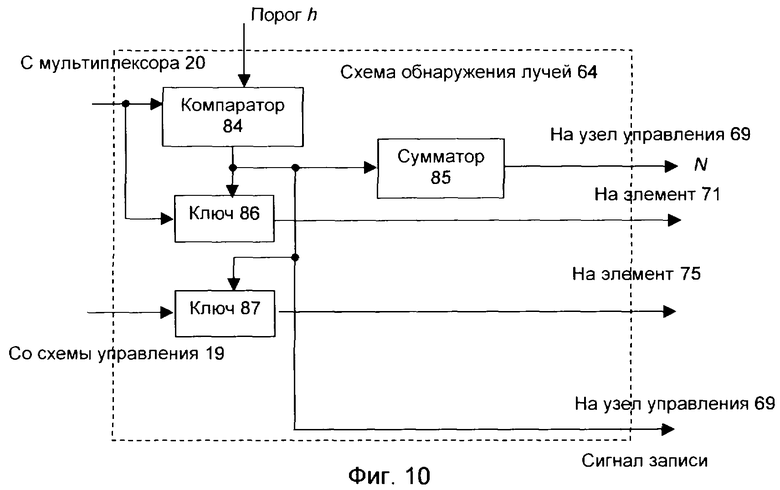



Изобретение относится к области радиотехники, в частности к способам приема многолучевого сигнала в системах связи с кодовым разделением каналов и может использоваться в приемных устройствах базовой и мобильной станций. Задача, которую решает предлагаемое изобретение - повышение помехоустойчивости и увеличение емкости системы связи при приеме многолучевого сигнала за счет эффективной периодической процедуры обновления компонент многолучевого сигнала при получении оценки поиска компонент, учета влияния компонент многолучевого сигнала друг на друга при проведении процедуры поиска, оптимизации числа компонент, которые используются для получения мягких решений об информационных символах. Реализация способа формирования мягких решений при приеме многолучевого сигнала позволяет существенно уменьшить сложность многолучевого приемника, т.к. для его реализации требуется меньшее количество однолучевых приемников, чем у прототипа. 6 н. и 10 з.п.ф-лы, 13 ил.
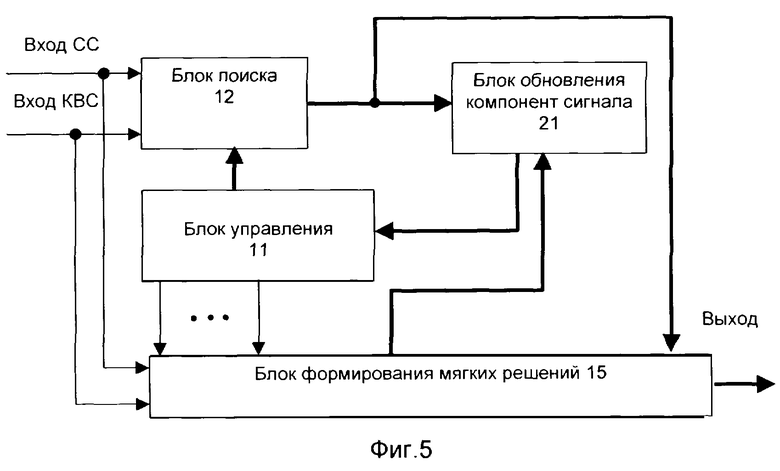
| СПОСОБ ПРИЕМА МНОГОЛУЧЕВЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2120180C1 |
| СПОСОБ ПОИСКА МНОГОЛУЧЕВОГО ШИРОКОПОЛОСНОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ, СПОСОБ ОБНАРУЖЕНИЯ И ОЦЕНКИ РАЗМЕРА КЛАСТЕРА СИГНАЛОВ ЛУЧЕЙ И БЛОК, ЕГО РЕАЛИЗУЮЩИЙ | 2001 |
|
RU2208916C1 |
| СПОСОБ ПРИЕМА МНОГОЛУЧЕВОГО СИГНАЛА | 2000 |
|
RU2168274C1 |
| СПОСОБ ПОСЛЕДОВАТЕЛЬНОГО ПОИСКА В МОБИЛЬНОЙ СИСТЕМЕ СВЯЗИ, ИМЕЮЩЕЙ ПЕРЕМЕННУЮ СКОРОСТЬ ПЕРЕДАЧИ ДАННЫХ | 1999 |
|
RU2199184C2 |
| Двигатель внутреннего сгорания | 1981 |
|
SU1041725A2 |
| Трехпозиционный регулятор температуры | 1980 |
|
SU877493A1 |
| US 5490165 A, 06.02.1996 | |||
| US 5710768 A, 20.01.1998 | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |

