Изобретение относится к области радиотехники, в частности к способам приема многолучевого сигнала в системах связи с кодовым разделением каналов, и может использоваться в приемных устройствах базовой и мобильной (абонентской) станций.
В системах связи с подвижными объектами каналы распространения сигнала между приемником и передатчиком данных являются многолучевыми и нестационарными. Эффективность систем связи во многом определяется способностью алгоритмов временной синхронизации обеспечить в многолучевых нестационарных каналах необходимую точность слежения за временными задержками компонент многолучевого сигнала. Компоненты многолучевого сигнала могут находиться в некоторой временной области неопределенности. Совокупность компонент многолучевого сигнала, для которых интервал задержки между любыми двумя лучами менее или равен одному чипу расширяющей кодовой псевдослучайной последовательности (ПСП), называется кластером лучей. Чип ПСП - это длительность одного элементарного временного интервала псевдослучайной последовательности.
В системах связи с кодовым разделением каналов в условиях многолучевости для улучшения качества связи используют многолучевые приемники, в которых производят взвешенное суммирование выходных сигналов совокупности однолучевых приемников. Последние собирают энергию компонент многолучевого сигнала. Обычно каждый однолучевый приемник включает независимую схему временной синхронизации. Такие многолучевые приемники эффективно функционируют, когда компоненты многолучевого сигнала являются разрешаемыми. Однако в случае приема кластеров лучей их эффективность заметно снижается.
Известен способ квазикогерентного приема, описанный в книге "Цифровые радиоприемные системы", под ред. М.И.Жодзишского, М.: Радио и связь, 1990, с.25-27. Временная синхронизация осуществляется посредством временных сдвигов опорного сигнала относительно принимаемого. Решение о направлении сдвига опорного сигнала принимается после сравнения выходных значений двух корреляторов схемы слежения за задержкой, опорные сигналы которых сдвинуты относительно опорного сигнала коррелятора демодулятора с опережением и запаздыванием соответственно. Если выходное значение опережающего коррелятора больше выходного значения коррелятора с запаздыванием, то опорный сигнал демодулятора сдвигается в направлении опережения. Если выходное значение запаздывающего коррелятора больше, то сдвиг производится в противоположном направлении.
Этот подход является эффективным при наличии нескольких хорошо разрешаемых компонент многолучевого сигнала, т.е. отстоящих друг от друга по времени на несколько чипов. При обработке многолучевого сигнала с кластерной структурой (разность временных положений (задержек) сигналов соседних лучей меньше чипа ПСП) такой подход приводит к существенным энергетическим потерям.
Известен способ многолучевого приема, приведенный в патенте США № 5490165 "Demodulation Element Assignment in a System Capable of Receiving Multiple Signals", H 04 B 1/69, Feb. 6, 1996.
Описанный способ заключается в следующем. Производят предварительный поиск временных положений (задержек) сигналов лучей, получая первоначальные оценки временных положений (задержек) сигналов лучей. Для каждого луча производят оценку временной задержки его сигнала. Получают мягкие решения об информационных символах для всех однолучевых приемников и объединяют эти мягкие решения путем их взвешенного суммирования.
Этот подход является эффективным при наличии только разрешаемых компонент многолучевого сигнала. Недостатком этого метода является независимость систем слежения однолучевых приемников. Действительно, при приеме близко расположенных сигналов лучей с течением времени несколько однолучевых приемников могут начать отслеживать один и тот же луч, что приводит к существенным энергетическим потерям.
Известен способ квазикогерентного приема многолучевого сигнала, описанный в патенте РСТ WO 97/28608; "Method and Arrangement of Signal Tracking and a Rake-receiver Utilizing Said Arrangement"; 07.08.97; H 04 B 1/10, 1/707, TELEFONAKTIEBOLAGET LM ERICSSON. В этом способе выполняется совместная настройка систем слежения за задержкой всех однолучевых приемников, демодулирующих компоненты многолучевого сигнала. Настройка начинается с системы слежения за задержкой однолучевого приемника, демодулирующего максимальную компоненту многолучевого сигнала, и выполняется таким образом, чтобы временной сдвиг между опорными сигналами любых двух демодуляторов не был меньше некоторой заранее заданной величины. Предполагается, что блок поиска обнаружил все необходимые компоненты многолучевого сигнала.
Недостатком данного алгоритма является необходимость предварительного обнаружения компонент многолучевого сигнала, что предполагает разрешаемость этих компонент. Когда компоненты неразрешаемы, основная предпосылка работы алгоритма не выполняется, т.е. алгоритм не в состоянии эффективно осуществлять прием кластера. Это приводит к энергетическим потерям.
Наиболее близким к предлагаемому решению является способ приема многолучевых сигналов и устройство для его реализации, описанные в патенте РФ № 2120180.
Описанный способ приема многолучевых сигналов заключается в следующем:
- проводят поиск лучей на интервале многолучевости;
- проводят поиск кластеров лучей, представляющих объединенные группы из обнаруженных лучей, для которых интервал задержки между любыми двумя смежными по задержке лучами менее шага или равен шагу поиска сигнала по задержке;
- обнаруживают в каждом кластере луч максимальной мощности и определяют его как основной луч кластера, а остальные лучи определяют как дополнительные лучи кластера;
- формируют опорный сигнал для каждого обнаруженного луча;
- осуществляют временную подстройку опорных сигналов лучей, не входящих в кластеры, а также основных лучей кластеров таким образом, чтобы получить наибольший уровень взаимной корреляции между опорными сигналами лучей и принимаемым сигналом;
- осуществляют временные подстройки опорных сигналов дополнительных лучей таким образом, чтобы сохранилась разность задержек между опорными сигналами дополнительных лучей и опорными сигналами соответствующих им основных лучей;
- определяют сигналы взаимной корреляции между лучом и соответствующим ему опорным сигналом на длительности каждого принимаемого символа;
- взвешивают сигналы взаимной корреляции путем умножения на весовые коэффициенты, которые формируют таким образом, чтобы большему уровню сигнала корреляции соответствовал больший коэффициент;
- суммируют все взвешенные сигналы взаимной корреляции, соответствующие каждому принимаемому символу, формируя таким образом последовательность суммарных сигналов взаимной корреляции принимаемых символов, а затем используют ее для принятия решения о последовательности принимаемых символов.
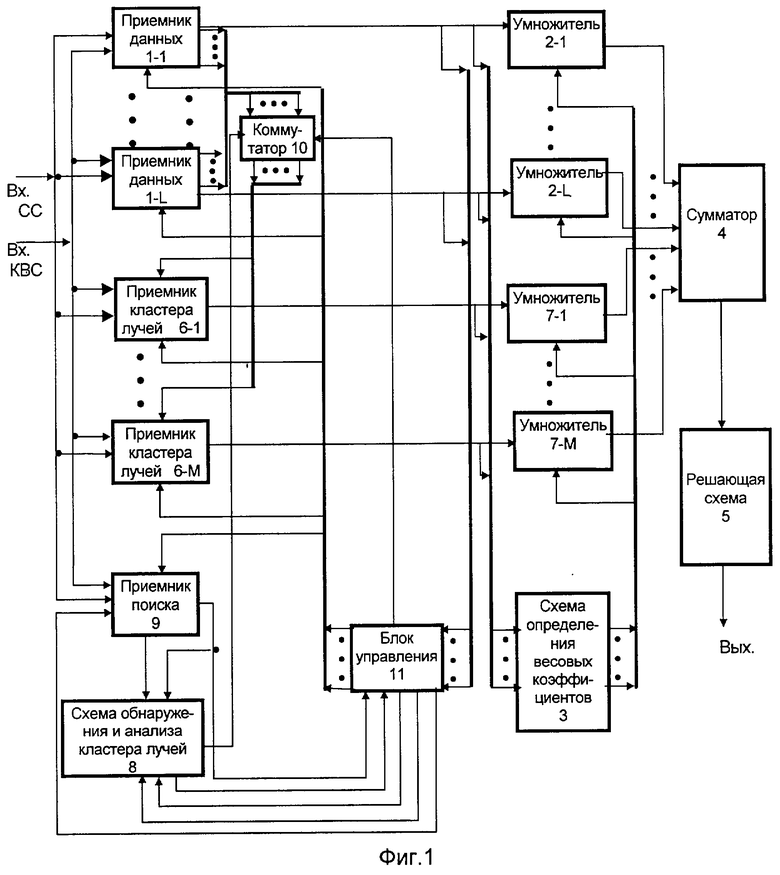
Устройство для реализации такого способа представлено на фиг.1, где обозначено:
1-1 - 1-L - приемники данных, 2-1 - 2-L - умножители, 3 - схема определения весовых коэффициентов, 4 - сумматор, 5 - решающая схема, 6-1 - 6-М - приемник кластера, 7-1 - 7-М - умножители, 8 - схема обнаружения и анализа кластера лучей, 9 - приемник поиска, 10 - коммутатор, 11 - блок управления.
Устройство приема многолучевых сигналов содержит L приемников данных 1-1 - 1-L и соответственно им схем умножения 2-1 - 2-L, схему определения весовых коэффициентов 3, каждый выход которой соединен с соответствующим ей умножителем 2-1 - 2-L, сумматор 4 и решающую схему 5, вход которой соединен с выходом сумматора 4, а выход является выходом устройства. Устройство содержит также М приемников кластеров лучей 6-1 - 6-М и соответственно им умножители 7-1 - 7-М, схему обнаружения и анализа кластера лучей 8, приемник поиска 9, коммутатор 10 и блок управления 11, при этом первый и второй входы каждого приемника данных 1-1 - 1-L, каждого приемника кластера лучей 6-1 - 6-М и приемника поиска 9 одновременно являются входами устройства, третий их вход соединен с соответствующими им первыми выходами блока управления 11, четвертый вход каждого приемника кластера лучей 6-1 - 6-М соединен с соответствующим ему выходом коммутатора 10, первые выходы которого соединены с соответствующими им первыми выходами каждого приемника данных 1-1 - 1-L, второй вход - с первым выходом схемы обнаружения и анализа кластера лучей 8, а третий вход - с вторым выходом блока управления 11, третий, четвертый и пятый выходы которого соединены соответственно с четвертым входом приемника поиска 9, первым и вторым входами схемы обнаружения и анализа кластера лучей 8, при этом первым выход приемника поиска 9 соединен с третьим входом схемы обнаружения и анализа кластера лучей 8, второй выход приемника поиска соединен с первый входом блока управления 11 и четвертым входом схемы обнаружения и анализа кластера лучей 8, второй выход схемы обнаружения и анализа кластера лучей 8 соединен с вторым входом блока управления 11, второй выход каждого приемника данных 1-1 - 1-L одновременно соединен с соответствующими ему третьим входом схемы определения весовых коэффициентов 3 и умножителем 2-1 - 2-L, выход каждого приемника кластера лучей 6-1 - 6-М одновременно соединен с соответствующими ему входом схемы определения весовых коэффициентов 3 и умножителем 7-1 - 7-М. Кроме того, выход каждого умножителя 2-1 - 2-L и 7-1 - 7-М соединен с соответствующим ему входом сумматора 4.
Устройство приема многолучевых сигналов, представленное на фиг.1, работает следующим образом.
Входной сигнал, содержащий синфазную и квадратурную составляющие, поступает на входы L-приемников данных 1-1 - 1-L и приемник поиска 9, при этом каждый приемник данных обрабатывает отдельный луч (один из L - лучей). Выходные сигналы приемников данных 1-1 - 1-L поступают на схемы умножения 2-1 - 2-L, где умножаются на весовые коэффициенты, которые формирует блок определения весовых коэффициентов 3 таким образом, что большему сигналу соответствует больший коэффициент. Затем выходные сигналы схем умножения суммируются сумматором 4 и подаются на вход решающей схемы 5, которая принимает решение о принятом информационном сигнале, и выход которой является выходом устройства. Приемник поиска 9 последовательно просматривает интервал многолучевости, при этом на каждом шаге проводится операция обнаружения сигнала. Максимальный из обнаруженных сигналов поступает на блок управления 11, где сравнивается с минимальным выходным сигналом соответствующего приемника данных. Если максимальный сигнал приемника поиска 9 больше минимального выходного сигнала одного из приемников данных, то этот приемник данных переходит на обработку луча, выделенного приемником поиска. Для этого блок управления 11 выдает на соответствующий приемник данных 1-1 - 1-L сигнал, по которому осуществляется перестройка генератора псевдослучайных последовательностей этого приемника, обеспечивающая прием выделенного луча.
После захвата приемником данных 1-1 - 1-L сигнала отдельного луча производится проверка наличия у него кластера лучей. Для этого блок управления 11 выдает на приемник поиска 9 последовательность команд, задающих временные сдвиги его генератору псевдослучайных последовательностей. По этим командам псевдослучайная последовательность приемника поиска 9 последовательно на величину, длительностью менее одного чипа или равную одному чипу, сдвигается влево, а затем вправо (запаздывает и опережает) относительно псевдослучайной последовательности приемника данных 1-1 - 1-L.
Влево псевдослучайная последовательность приемника поиска 9 сдвигается на Qn чипов, а вправо на Qm чипов.
Всего для просмотра временных сдвигов (Q=Qn+Qm) псевдослучайных последовательностей потребуется Q/K параллельных временных сдвигов К корреляторов приемника поиска 9.
При каждом сдвиге происходит накопление сигнала в корреляторах приемника поиска 9.
В схеме обнаружения и анализа кластера лучей 8 выходные значения корреляторов приемника поиска 9 сравниваются с порогом, сформированным в приемнике поиска 9. Превышение порога означает обнаружение сигнала.
Если при временном сдвиге на величину, длительностью менее одного чипа или равную одному чипу, происходит обнаружение сигнала, то это означает обнаружение кластера лучей.
Если обнаружен кластер Q лучей, то схема обнаружения и анализа кластера лучей выдает на блок управления 11 сигнал обнаружения кластера лучей, а на коммутатор 10 его размер. Размер кластера лучей определяется двумя величинами: числом правых и числом левых сдвигов (Qn и Qm).
По сигналу обнаружения кластера лучей блок управления 11 устанавливает коммутатор 10 таким образом, что опорные сигналы с приемника данных 1-1 - 1-L, относительно опорного сигнала которого обнаружен кластер лучей, поступают на М-приемников кластера лучей 6-1 - 6-М. Причем каждому обнаруженному кластеру лучей соответствует опорный сигнал приемника данных, по времени эти сигналы совпадают.
Выходные сигналы приемников кластера лучей 6-1 - 6-М умножаются на весовые коэффициенты, которые формируются таким образом, что большему сигналу соответствует больший коэффициент. Затем выходные сигналы суммируются сумматором 4 и подаются на вход решающей схемы 5.
Способ определения числа и временных задержек компонент многолучевого сигнала, описанный в патенте РФ № 2120180, заключается в следующем.
Определяют области наличия сигнала.
Для каждой области наличия сигнала определяют число компонент многолучевого сигнала и их начальные временные позиции (задержки), для этого выполняют следующие операции.
- Формируют комплексные корреляционные отклики пилот сигнала, определяя корреляцию входного сигнала с известной ПСП, сдвинутой на заданные дискретные интервалы времени в пределах области наличия сигнала.
- Определяют значения решающей функции в заданных дискретных временных позициях области наличия сигнала, суммируя квадраты синфазной и квадратурной частей соответствующих комплексных корреляционных откликов пилот сигнала.
- Производят сравнение значений решающей функции с порогом. Если порог превышен для временных позиций, отстоящих не более чем на один чип, принимается решение о наличии кластера лучей.
- Число компонент многолучевого сигнала при наличии кластера равно числу временных позиций области наличия сигнала, в которых решающая функция превысила порог.
- При наличии кластера начальные временные позиции компонент многолучевого сигнала определяют как позиции, в которых решающая функция превысила порог. Компоненту многолучевого сигнала, соответствующую положению максимума решающей функции, определяют как основную компоненту кластера (прием которой осуществляют основным однолучевым приемником кластера), а остальные компоненты определяют как дополнительные компоненты кластера (прием которых осуществляют дополнительными однолучевыми приемниками кластера).
- Если кластер не обнаружен, начальную временную позицию компоненты многолучевого сигнала определяют как позицию, в которой приемник поиска обнаружил сигнал. Для приема такой компоненты используют один однолучевый приемник.
Периодически осуществляют временную подстройку опорных сигналов однолучевых приемников, не входящих в кластеры, а также основных однолучевых приемников кластеров таким образом, чтобы получить наибольший уровень взаимной корреляции между опорными сигналами однолучевых приемников и принимаемым сигналом. При этом осуществляют временную подстройку дополнительных однолучевых приемников кластеров таким образом, чтобы сохранялась разность задержек между опорными сигналами дополнительных однолучевых приемников кластеров и опорными сигналами соответствующих им основных однолучевых приемников кластеров.
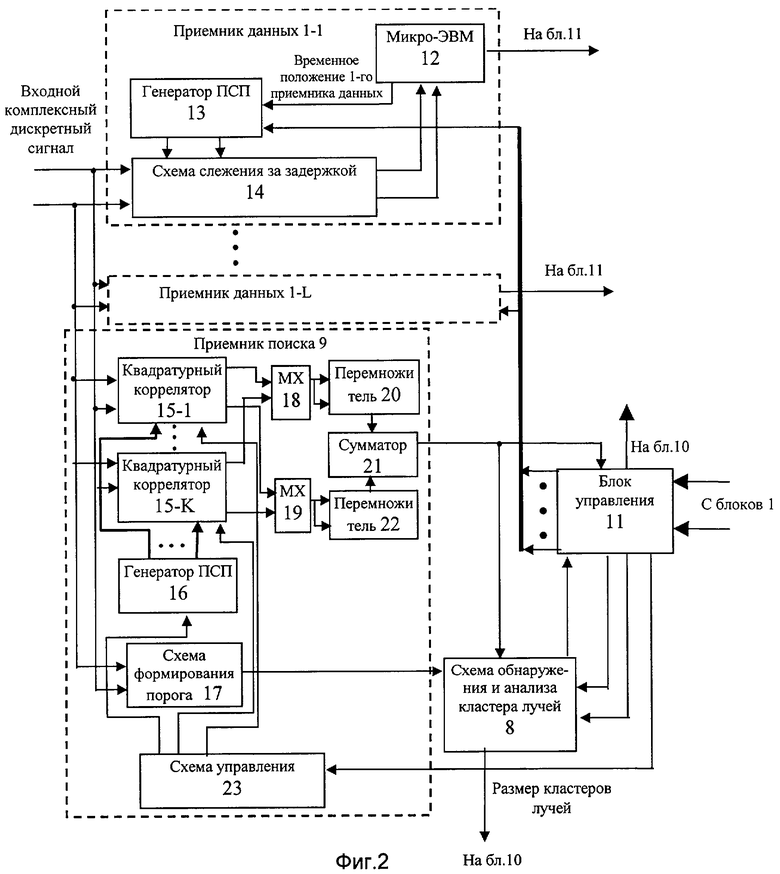
Устройство определения числа и временных позиций компонент многолучевого сигнала представлено на фиг.2, где обозначено:
1-1 - 1- L - приемник данных, 8 - схема обнаружения и анализа кластера лучей, 9 - приемник поиска, 11 - блок управления, 12 - микро-ЭВМ, 13 - генератор ПСП, 14 - схема слежения за задержкой, 15-1 - 15-К - квадратурный коррелятор, 16 - генератор ПСП, 17 - схема формирования порога, 18 - первый мультиплексор, 19 - второй мультиплексор, 20 - первый перемножитель, 21 - сумматор, 22 - второй перемножитель, 23 - схема управления.
Устройство-прототип определения необходимого числа и временных позиций однолучевых приемников содержит L приемников данных 1-1 - 1-L, приемник поиска 9, схему обнаружения и анализа кластера лучей 8 и блок управления 11. Каждый из L приемников данных 1-1 - 1-L содержит схему слежения за задержкой 14, первый и второй входы которой являются сигнальными входами устройства, третий и четвертый входы схемы слежения за задержкой 14 соединены с соответствующими выходами генератора ПСП 13. Первый и второй выходы схемы слежения за задержкой 14 соединены с первым и вторым входами микро-ЭВМ 12, первый выход которой соединен с первым входом генератора ПСП 13 и является выходом временного положения соответствующего приемника данных 1-1 - 1-L, второй выход микро-ЭВМ 12 соединен с соответствующим входом блока управления 11.
Приемник поиска 9 содержит К квадратурных коррелятора 15-1 - 15-K, первые и вторые входы которых объединены с первым и вторым входами схемы формирования порога 17 и с сигнальными входами устройства. Третий вход каждого квадратурного коррелятора 15-1 - 15-K соединен с соответствующим ему выходом генератора ПСП 16, четвертый вход каждого квадратурного коррелятора 15-1 - 15-K соединен с соответствующим ему одним выходом схемы управления 23. Другой выход схемы управления соединен со входом генератора ПСП 16. При этом вход схемы управления 23 является входом управляющего сигнала и соединен с третьим выходом блока управления 11.
Первый выход каждого квадратурного коррелятора 15-1 - 15-К соединен с соответствующим входом первого мультиплексора 18. Второй выход каждого квадратурного коррелятора 15-1 - 15-K соединен с соответствующим входом второго мультиплексора 19. Выход первого мультиплексора 18 соединен с первым и вторым входами первого перемножителя 20, а выход второго мультиплексора 19 соединен с первым и вторым входами второго перемножителя 21. Выходы первого и второго перемножителей 20 и 21 соединены с соответствующими входами сумматора 20, выход которого соединен с первым входом блока управления 11 и четвертым входом схемы обнаружения и анализа кластера лучей 8. Выход схемы формирования порога 17 соединен с третьим входом схемы обнаружения и анализа кластера лучей 8, первый и второй входы которого соединены с четвертым и пятым выходом блока управления 11. Первый выход схемы обнаружения и анализа кластера лучей 8 является выходом размера кластеров лучей, второй - соединен со вторым входом блока управления 11.
Работает устройство следующим образом.
Входной сигнал поступает на входы L приемников данных 1-1 - 1-L и на входы приемника поиска 9, т.е. на входы схемы формирования порога 17 и на входы K параллельных квадратурных корреляторов 15-1 - 15-K. На другие входы квадратурных корреляторов 15-1 - 15-К поступают синфазные и квадратурные составляющие опорного сигнала с генератора ПСП 16. Временными положениями (задержками) опорных сигналов генератора ПСП 16 управляет сигнал схемы управления 23. В каждом квадратурном корреляторе 15-1 - 15-K входной сигнал перемножается на опорный сигнал. Синфазные и квадратурные составляющие результатов перемножения накапливаются, формируя комплексные корреляционные отклики пилот-символов. С выходов квадратурных корреляторов 15-1 - 15-K синфазные и квадратурные составляющие этих откликов через схемы мультиплексоров 18 и 19 поступают на входы перемножителей 20 и 21. С выходов перемножителей 20 и 21 квадраты синфазной и квадратурной составляющих корреляционных откликов поступают на входы сумматора 22. Выходной сигнал сумматора 22, представляющий собой последовательность значений решающей функции в заданных дискретных временных позициях области, поступает на вход схемы обнаружения и анализа кластера лучей 8 и на вход блока управления 11.
Схема управления 23 по сигналу с блока управления 11 осуществляет временной сдвиг генератора псевдослучайной последовательности 16 и соответственно со сдвигом обнуляет квадратурные корреляторы 15-1 - 15-K.
Схема формирования порога 17 формирует порог, используемый для обнаружения кластера лучей по входному сигналу, поступающему на его входы.
В схеме обнаружения и анализа кластера лучей 8 значения решающей функции сравниваются с порогом, сформированным в схеме формирования порога 17. Превышение порога означает обнаружение сигнала.
Если при временном сдвиге на величину, длительностью менее одного чипа или равную одному чипу, происходит обнаружение сигнала, то это означает обнаружение кластера лучей.
Если обнаружен кластер Q лучей, то схема обнаружения и анализа кластера лучей 8 выдает на блок управления 11 сигнал обнаружения кластера лучей и его размер. Размер кластера лучей определяется двумя величинами: числом правых и числом левых сдвигов (Qn и Qm). Необходимое число приемников при приеме кластера определяется числом временных позиций области, в которых произошло обнаружение сигнала.
Приемники при приеме кластера лучей устанавливают в начальные временные позиции, в которых решающая функция превысила порог. Приемник кластера, установленный в положение максимума решающей функции, определяют как основной однолучевый приемник кластера (приемник данных 1), а остальные приемники определяют как дополнительные однолучевые приемники кластера.
Если кластер не обнаружен, используют один приемник (приемник данных 1), который устанавливают во временную позицию, в которой приемник поиска обнаружил сигнал.
Временные позиции приемников данных 1 и дополнительных однолучевых приемников в процессе работы определяются следующим образом. В приемниках данных 1-1 - 1-L входной сигнал поступает на входы схемы слежения за задержкой 14, на другие входы которой поступают синфазные и квадратурные составляющие опорного сигнала с генератора ПСП 13. Схема слежения за задержкой 14 рассчитывает взаимную корреляцию между опорным сигналом и входным сигналом. Выходной сигнал схемы слежения за задержкой 14 поступает на вход микро-ЭВМ 12, которая периодически осуществляет временную подстройку генератора ПСП 13 таким образом, чтобы получить наибольший уровень взаимной корреляции между опорным сигналом и принимаемым сигналом.
Одновременно с подстройкой опорных сигналов приемников данных 1 осуществляется подстройка дополнительных однолучевых приемников кластеров таким образом, чтобы сохранялась разность задержек между опорными сигналами дополнительных однолучевых приемников и опорными сигналами соответствующих им основных однолучевых приемников.
Недостатком данного способа приема многолучевого сигнала с кластерной структурой является необходимость использования большого количества однолучевых приемников (пропорционально длительности кластера) - при небольшом временном расстоянии между временными положениями опорных сигналов соседних однолучевых приемников кластера, и низкая эффективность - при значительном временном расстоянии между временными положениями (задержками) опорных сигналов соседних однолучевых приемников кластера. При этом число и временные положения опорных сигналов используемых однолучевых приемников не оптимизируются. Кроме того, слежение за кластером лучей основано на слежении за основным лучом кластера. Однако при слежении за временным положением (задержкой) основного луча кластера возможно замирание сигнала этого луча, так что его мощность окажется меньше мощности сигналов других лучей кластера. Это приводит к погрешности слежения и, как следствие, к энергетическим потерям.
Задача, которую решает предлагаемое изобретение - повышение помехоустойчивости и увеличение емкости системы связи при приеме многолучевого сигнала с кластерной структурой за счет оптимизации числа и временных положений опорных сигналов используемых однолучевых приемников.
Для решения этой задачи в способ приема многолучевого сигнала, заключающийся в том, что проводят поиск сигнала и определяют число и временные задержки компонент многолучевого сигнала, определяют области временных задержек компонент многолучевого сигнала, при приеме каждой найденной компоненты многолучевого сигнала формируют последовательность корреляционных откликов информационных символов, определяя корреляцию входного сигнала с известной псевдослучайной последовательностью с соответствующей задержкой на интервалах длительности каждого символа, осуществляют взвешенное суммирование корреляционных откликов информационных символов всех компонент многолучевого сигнала, получая объединенные мягкие решения об информационных символах, дополнительно введены следующие операции:
- после определения областей временных задержек компонент многолучевого сигнала для каждой области временных задержек компонент многолучевого сигнала периодически уточняют число и временные задержки компонент многолучевого сигнала,
- для уточненных компонент многолучевого сигнала осуществляют прием, формирование последовательности корреляционных откликов информационных символов и взвешенное суммирование корреляционных откликов информационных символов.
Поиск сигнала проводят, например, с шагом по задержке, равным одному или половине чипа известной псевдослучайной последовательности.
Область временных задержек компонент многолучевого сигнала определяют таким образом, чтобы охватить отдельную или подряд следующие по задержке найденные при поиске компоненты многолучевого сигнала, при этом начало области задержек расположено ранее первой компоненты многолучевого сигнала области задержек на половину шага поиска, окончание области задержек - позже последней компоненты многолучевого сигнала области задержек на половину шага поиска.
Весовые коэффициенты при суммировании корреляционных откликов информационных символов уточненных компонент многолучевого сигнала выбирают, например, как комплексно сопряженные оценки комплексной огибающей информационных символов уточненных компонент многолучевого сигнала.
Для решения этой же задачи в способ определения числа и временных задержек компонент многолучевого сигнала, заключающийся в том, что проводят поиск сигнала и определяют число и временные задержки компонент многолучевого сигнала, определяют области временных задержек компонент многолучевого сигнала, формируют комплексные корреляционные отклики пилот-сигнала, определяя корреляцию входного сигнала с известной псевдослучайной последовательностью, сдвинутой на заданные дискретные интервалы времени в пределах области временных задержек компонент многолучевого сигнала, определяют значения решающей функции в заданных дискретных временных задержках области временных задержек компонент многолучевого сигнала, суммируя квадраты синфазной и квадратурной частей соответствующих комплексных корреляционных откликов пилот-сигнала, дополнительно введены следующие операции:
после определения областей временных задержек компонент многолучевого сигнала для каждой области временных задержек компонент многолучевого сигнала
- производят поэтапное уточнение временных задержек компонент многолучевого сигнала, на каждом этапе определяя одну компоненту многолучевого сигнала;
- при этом на первом этапе после формирования комплексных корреляционных откликов пилот-сигнала и определения значений решающей функции находят временную задержку максимума решающей функции, которую принимают за временную задержку компоненты многолучевого сигнала;
- на последующих этапах корректируют комплексные корреляционные отклики области временных задержек компонент многолучевого сигнала предыдущего этапа, получая скорректированные комплексные корреляционные отклики текущего этапа;
- определяют значения решающей функции текущего этапа в заданных дискретных временных задержках области временных задержек компонент многолучевого сигнала, суммируя квадраты синфазной и квадратурной частей соответствующих скорректированных комплексных корреляционных откликов текущего этапа;
- находят временную задержку максимума решающей функции текущего этапа;
- сравнивают значение максимума решающей функции текущего этапа с заданным порогом;
- при превышении порога временную задержку компоненты многолучевого сигнала определяют равной временной задержке максимума решающей функции текущего этапа и переходят к следующему этапу;
- если порог не превышен, то поиск компонент многолучевого сигнала и определение их временных задержек области временных задержек компонент многолучевого сигнала прекращают;
- определяют число компонент многолучевого сигнала как количество компонент, для которых были уточнены временные задержки.
Коррекцию каждого комплексного корреляционного отклика области временных задержек компонент многолучевого сигнала осуществляют путем формирования комплексной корректирующей величины, равной произведению корреляционного отклика максимума решающей функции предыдущего этапа на коэффициент корреляции, зависящий от модуля разности временных задержек корректируемого корреляционного отклика и максимума решающей функции предыдущего этапа, вычитания сформированной комплексной корректирующей величины из комплексного корреляционного отклика предыдущего этапа, умножения результата вычитания на множитель, зависящий от коэффициента корреляции, в результате получая скорректированный комплексный корреляционный отклик.
Для повышения помехоустойчивости и увеличения емкости системы связи при приеме многолучевого сигнала в устройство приема многолучевых сигналов, содержащее М однолучевых приемников, М умножителей, приемник поиска, блок управления, блок определения весовых коэффициентов и сумматор, первый и второй входы каждого однолучевого приемника и приемника поиска одновременно являются сигнальными входами устройства, третьи их входы соединены с выходом блока управления, обеспечивающего синхронную работу приемников, выход значений решающей функции поиска приемника поиска соединен со входом блока управления, выход каждого из М однолучевых приемников соединен с соответствующими входами блока определения весовых коэффициентов, выходы значений весовых коэффициентов которого соединены со вторыми входами М умножителей, причем выходы корреляционных откликов об информационных символах М однолучевых приемников соединены с первыми входами М умножителей, выходы которых являются выходами мягких решений об информационных символах и соединены с соответствующими входами сумматора, выход сумматора является выходом объединенных мягких решений об информационных символах, дополнительно введены:
блок определения числа и временных задержек компонент многолучевого сигнала и М генераторов псевдослучайной последовательности, первый и второй выходы каждого генератора псевдослучайной последовательности, которые являются выходами опорного сигнала, соединены с первым и вторым опорными входами соответствующего однолучевого приемника, входы генераторов псевдослучайной последовательности являются входами управления состояния и соединены с соответствующим управляющим выходом блока управления, первый и второй входы блока определения числа и временных задержек компонент многолучевого сигнала объединены с сигнальными входами устройства, управляющие входы блока определения числа и временных задержек компонент многолучевого сигнала соединены с управляющими выходами блока управления, выход оценки временных задержек компонент многолучевого сигнала и выход сигнала превышения порога блока определения числа и временных задержек компонент многолучевого сигнала объединены и соединены с соответствующими входами блока управления.
Для решения этой же задачи в блок определения числа и временных задержек компонент многолучевого сигнала, содержащий квадратурный коррелятор, генератор псевдослучайной последовательности, первый и второй выходы опорного сигнала генератора псевдослучайной последовательности соединены с соответствующими опорными входами квадратурного коррелятора, первый и второй перемножители, выходы которых соединены со входами сумматора, узел формирования порога, вход управления состояния генератора псевдослучайной последовательности соединен с управляющим выходом блока управления, дополнительно введены:
узел памяти, первый и второй коммутатор, первый и второй элементы коррекции, узел определения временной задержки максимума решающей функции, узел сравнения максимума решающей функции с порогом, причем первый и второй входы узла памяти являются сигнальными и соединены со входом устройства, первый и второй входы квадратурного коррелятора являются сигнальными и соединены с первым и вторым выходами узла памяти, первый и второй выходы комплексных корреляционных откликов пилот-сигнала квадратурного коррелятора соединены с первыми входами первого и второго коммутаторов, выход каждого коммутатора соединен с первым и вторым входом соответствующего перемножителя и входом элемента коррекции, выход которого является выходом синфазной или квадратурной составляющей скорректированных комплексных корреляционных откликов пилот-сигнала и соединен со вторым входом коммутатора, выход сумматора, который является выходом значений решающей функции, соединен с первым входом узла определения временной задержки максимума решающей функции, выход которого является выходом значения максимума решающей функции, соединен с первым входом узла формирования порога и первым входом узла сравнения максимума решающей функции с порогом, второй вход которого соединен с выходом значения порога узла формирования порога, вход сигнала сброса квадратурного коррелятора, управляющие входы первого и второго коммутаторов, входы синхронизации первого и второго элементов коррекции, вход синхронизации узла определения временной задержки максимума решающей функции, вход синхронизации узла формирования порога, вход синхронизации узла сравнения максимума решающей функции с порогом, управляющий вход узла памяти объединены и соединены с управляющими выходами блока управления, выход узла определения временной задержки максимума решающей функции, который является выходом оценки временных задержек компонент многолучевого сигнала, и выход сигнала превышения порога узла сравнения максимума решающей функции с порогом объединены и соединены с входами блока управления.
Сопоставительный анализ способа многолучевого приема с прототипом показывает, что предлагаемое изобретение существенно отличается от прототипа, так как позволяет повысить помехоустойчивость и увеличить емкость системы связи при приеме многолучевого сигнала с кластерной структурой.
Сопоставительный анализ заявляемого способа с другими техническими решениями в данной области техники не позволил выявить признаки, заявленные в отличительной части формулы изобретения. Следовательно, заявляемый способ многолучевого приема отвечает критериям "новизна", "техническое решение задачи", "существенные отличия" и обладает неочевидностью решения.
Сопоставительный анализ второго решения, способа определения числа и временных задержек компонент многолучевого сигнала с прототипом, показывает, что предлагаемое изобретение также отличается от прототипа, так как за счет оптимизации числа и временных положений опорных сигналов используемых однолучевых приемников позволяет повысить помехоустойчивость и увеличить емкость системы связи при приеме многолучевого сигнала с кластерной структурой.
Сопоставительный анализ второго заявляемого способа с другими техническими решениями в данной области техники не позволил выявить признаки, заявленные в отличительной части формулы изобретения. Следовательно, заявляемый способ определения числа и временных задержек компонент многолучевого сигнала, для которых осуществляют квазикогерентный прием, отвечает критериям "новизна", "техническое решение задачи", "существенные отличия" и обладает неочевидностью решения.
Сопоставительный анализ третьего технического решения, устройства многолучевого приема с прототипом показывает, что предлагаемое изобретение существенно отличается от прототипа, так как приводит к повышению помехоустойчивости и увеличению емкости системы связи при приеме многолучевого сигнала с кластерной структурой за счет введения блока определения числа и временных задержек опорных сигналов используемых однолучевых приемников.
Сопоставительный анализ заявляемого устройства с другими техническими решениями в данной области техники не позволил выявить признаки, заявленные в отличительной части формулы изобретения. Следовательно, заявляемое устройство многолучевого приема отвечает критериям "новизна", "техническое решение задачи", "существенные отличия" и обладает неочевидностью решения.
Сопоставительный анализ четвертого технического решения, устройства определения числа и временных задержек компонент многолучевого сигнала, с прототипом показывает, что предлагаемое изобретение существенно приводит к повышению помехоустойчивости и увеличению емкости системы связи при приеме многолучевого сигнала с кластерной структурой за счет предлагаемой совокупности блоков, входящих в состав устройства и их связей.
Сопоставительный анализ четвертого технического решения с другими техническими решениями в данной области техники не позволил выявить признаки, заявленные в отличительной части формулы изобретения. Следовательно, заявляемое устройство определения числа и временных задержек компонент многолучевого сигнала отвечает критериям "новизна", "техническое решение задачи", "существенные отличия" и обладает неочевидностью решения.
Изобретение поясняется чертежами, на которых изображены:
Фиг.1 - структурная схема устройства приема многолучевого сигнала (прототип);
Фиг.2 - структурная схема блока определения числа и временных задержек компонент многолучевого сигнала (прототип);
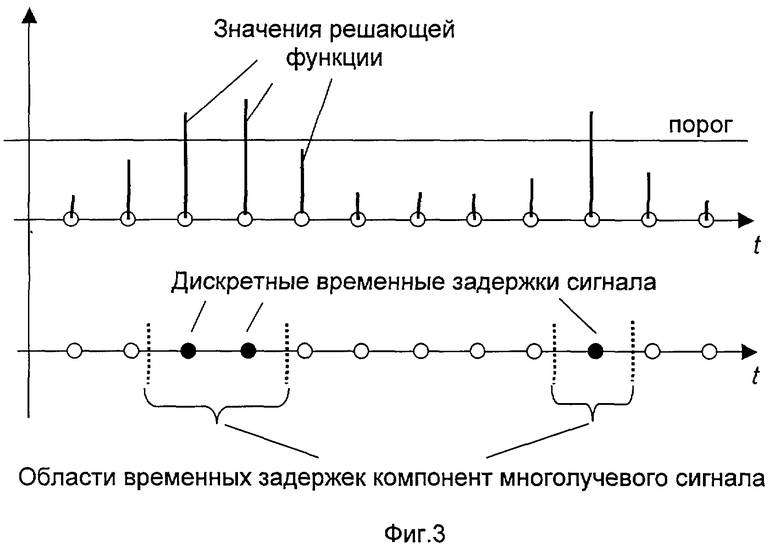
Фиг.3 - пример определения области временных задержек компонент многолучевого сигнала;
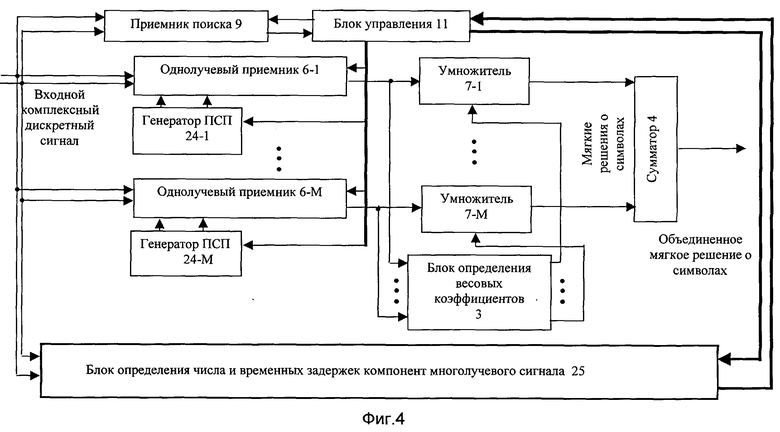
Фиг.4 - структурная схема предлагаемого устройства приема многолучевого сигнала;
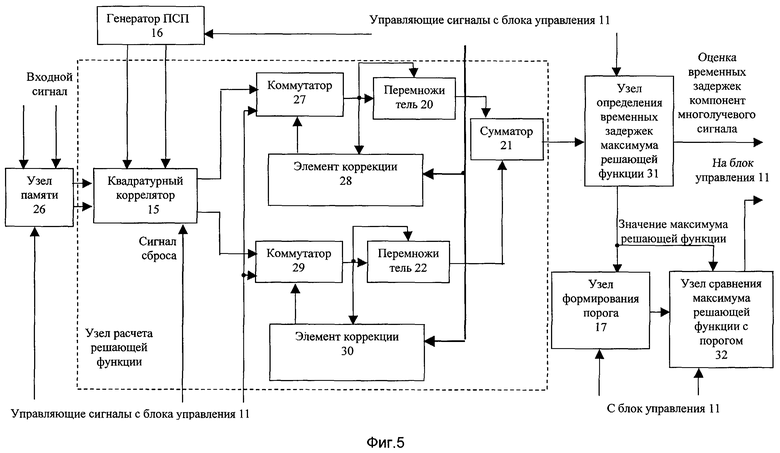
Фиг.5 - структурная схема предлагаемого блока определения числа и временных задержек компонент многолучевого сигнала;
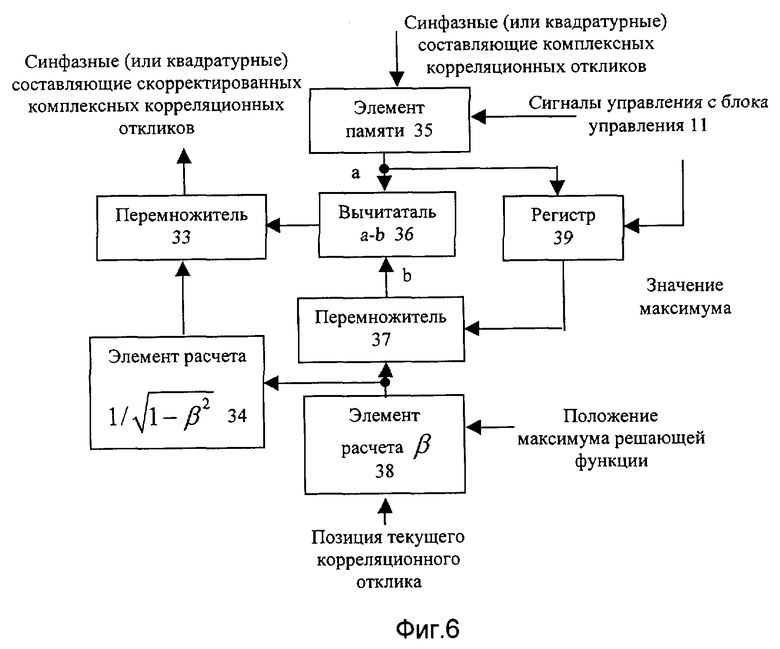
Фиг.6 - пример реализации элемента коррекции;
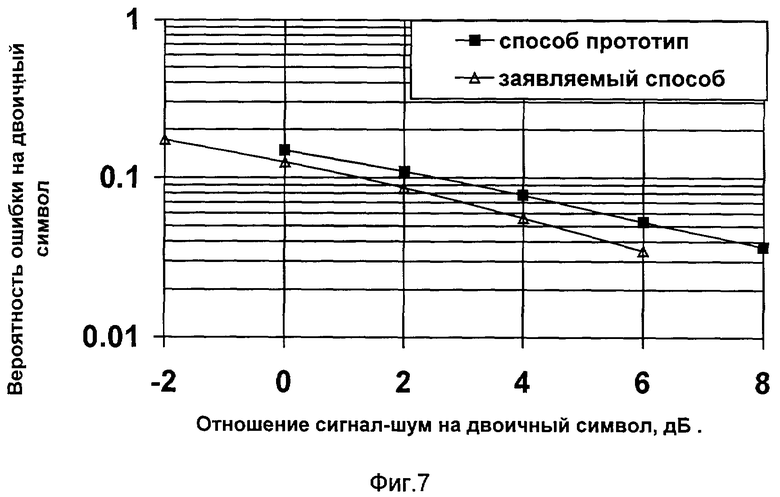
Фиг.7 - зависимость вероятности ошибки от отношения сигнал/шум для предлагаемого способа и способа прототипа.
Предлагаемый способ приема многолучевого сигнала заключается в следующем.
- Проводят поиск сигнала и определяют число и временные задержки компонент многолучевого сигнала.
- Определяют области временных задержек компонент многолучевого сигнала.
- Для каждой области временных задержек компонент многолучевого сигнала периодически уточняют число и временные задержки компонент многолучевого сигнала.
- При приеме каждой уточненной компоненты многолучевого сигнала формируют последовательность корреляционных откликов информационных символов, определяя корреляцию входного сигнала с известной ПСП на интервалах длительности каждого символа.
- Осуществляют взвешенное суммирование корреляционных откликов информационных символов всех компонент многолучевого сигнала, получая объединенные мягкие решения об информационных символах.
При поиске сигнала решающая функция формируется для временных задержек с некоторым дискретом (шагом), например, один или половина чипа ПСП. Компоненты многолучевого сигнала или их временные задержки определяются по превышению решающей функцией поиска заданного порога. Количество превышений решающей функцией поиска порога определяет число компонент многолучевого сигнала.
Области временных задержек компонент многолучевого сигнала определяют, например, таким образом, чтобы охватить отдельную или подряд следующие найденные компоненты многолучевого сигнала, при этом начало области расположено ранее первой компоненты многолучевого сигнала области на половину шага поиска, окончание области - позже последней компоненты многолучевого сигнала области на половину шага поиска (см. фиг.3).
Уточненной компонентой многолучевого сигнала будем считать компоненту, расположенную на уточненной временной задержке (позиции). Суммарное уточненное число компонент многолучевого сигнала всех областей временных задержек компонент многолучевого сигнала равно количеству уточненных компонент.
Веса при суммировании корреляционных откликов информационных символов уточненных компонент многолучевого сигнала могут выбираться, например, как комплексно сопряженные оценки комплексной огибающей информационных символов уточненных компонент многолучевого сигнала.
Для реализации такого способа используется устройство, представленное на фиг.4, где обозначено:
3 - блок определения весовых коэффициентов,
4 - сумматор,
6-1 - 6-М - однолучевый приемник (приемник кластера лучей),
7-1 - 7-М - умножитель,
9 - приемник поиска,
11 - блок управления,
24-1 - 24-М - генератор ПСП,
25 - блок определения числа и временных задержек компонент многолучевого сигнала.
Устройство содержит М однолучевых приемников 6-1 - 6-М, выход корреляционных откликов об информационных символах каждого из которых соединен с соответствующим ему умножителем 7-1 - 7-М и с соответствующим входом блока определения весовых коэффициентов 3, М генераторов ПСП 24-1 - 24-М, приемник поиска 9, блок управления 11 и блок определения числа и временных задержек компонент многолучевого сигнала 25. При этом первые и вторые входы приемника поиска 9 и однолучевых приемников 6-1 - 6-М, блока определения числа и временных задержек компонент многолучевого сигнала 25 объединены между собой и являются сигнальными входами устройства. Третий вход приемника поиска 9 и третьи входы однолучевых приемников 6-1 - 6-М соединены с выходом блока управления 11, обеспечивающего синхронную работу приемников 9 и 6-1 - 6-М. Выход приемника поиска 9, который является выходом значений решающей функции поиска, соединен с входом блока управления 11. Четвертый и пятый опорные входы однолучевых приемников 6-1 - 6-М соединены с выходами соответствующего генератора ПСП 24-1 - 24-М. Вход каждого генератора ПСП 24-1 - 24-М, который является входом управления состояния, соединен с соответствующим управляющим выходом блока управления 11. Управляющие входы блока определения числа и временных задержек компонент многолучевого сигнала 25 соединены с управляющими выходами блока управления 11. Выход оценки временных задержек компонент многолучевого сигнала и выход сигнала о превышении порога блока определения числа и временных задержек компонент многолучевого сигнала 25 объединены и соединены с соответствующими входами блока управления 11.
Вторые входы умножителей 7-1 - 7-М соединены с выходами значений весовых коэффициентов блока определения весовых коэффициентов 3. Выход каждого умножителя 7-1 - 7-М является выходом мягких решений об информационных символах и соединен с соответствующим входом сумматора 4, выход которого является выходом объединенных мягких решений об информационных символах и выходом устройства.
Предлагаемое устройство приема многолучевого сигнала работает следующим образом.
Входной комплексный дискретный сигнал поступает на блок определения числа и временных задержек компонент многолучевого сигнала 25, на входы однолучевых приемников (в прототипе - приемники кластера лучей) 6-1 - 6-М и на входы приемника поиска сигнала 9. Приемник поиска 9, который выполнен так же, как у прототипа, формирует решающую функцию поиска в дискретных временных позициях. Эта информация с приемника поиска 9 поступает в блок управления 11, который сравнивает полученные значения решающей функции с порогом и определяет области временных задержек компонент многолучевого сигнала (временные положения областей наличия сигнала). В соответствии с найденными значениями временных задержек областей наличия сигнала блок управления 11 управляет работой блока определения числа и временных задержек компонент многолучевого сигнала 25. С выхода этого блока оценки временных задержек числа компонент многолучевого сигнала поступают в блок управления 11. Блок управления 11 в соответствии с полученными оценками устанавливает опорные генераторы ПСП 24-1 - 24-М, выходные опорные сигналы которых поступают на соответствующие однолучевые приемники 6-1 - 6-M.
Однолучевые приемники 6-1 - 6-М формируют комплексные корреляционные отклики символов, которые поступают на блок определения весовых коэффициентов 3 и умножители 7-1 - 7-М. Блок определения весовых коэффициентов 3 формирует необходимые веса при объединении комплексных корреляционных откликов всех однолучевых приемников. Эти веса являются в общем случае комплексными и могут формироваться, например, как комплексно сопряженные величины оценок комплексной огибающей входных сигналов однолучевых приемников.
Сигналы с выходов умножителей 7-1 - 7-М, представляющие собой мягкие решения об информационных символах, поступают на входы сумматора 4, где осуществляется их объединение. Выходной сигнал сумматора 4 представляет собой объединенное мягкое решение и является результатом работы устройства приема многолучевого сигнала.
Для определения числа и временных задержек компонент многолучевого сигнала предлагается способ, который заключается в следующем.
Для каждой области наличия сигнала производят поэтапное уточнение временных задержек компонент многолучевого сигнала, на каждом этапе определяя одну компоненту многолучевого сигнала, при этом на первом этапе:
- формируют комплексные корреляционные отклики пилот символов, определяя на интервалах длительности символа корреляцию входного сигнала с известной ПСП, сдвинутой на заданные дискретные интервалы времени в пределах области временных задержек компонент многолучевого сигнала (области наличия сигнала);
- определяют значения решающей функции в заданных дискретных временных задержек (позиций) области временных задержек компонент многолучевого сигнала, суммируя квадраты синфазной и квадратурной частей соответствующих комплексных корреляционных откликов пилот-сигнала;
- находят временную позицию максимума решающей функции, которую принимают за временную позицию компоненты многолучевого сигнала.
На последующих этапах:
- корректируют комплексные корреляционные отклики области наличия сигнала, получая скорректированные комплексные корреляционные отклики текущего этапа;
- определяют значения решающей функции текущего этапа в заданных дискретных временных позициях области наличия сигнала, суммируя квадраты синфазной и квадратурной частей соответствующих скорректированных комплексных корреляционных откликов текущего этапа;
- находят временную позицию (задержку) максимума решающей функции текущего этапа;
- сравнивают значение максимума решающей функции текущего этапа с заданным порогом, при превышении порога временную позицию очередной компоненты многолучевого сигнала определяют равной временной позиции максимума решающей функции текущего этапа и переходят к следующему этапу, если порог не превышен, то поиск компонент многолучевого сигнала и определение их временных позиций области наличия сигнала прекращают.
Количество компонент, для которых были уточнены временные позиции, равно числу уточненных компонент многолучевого сигнала.
Коррекцию каждого комплексного корреляционного отклика области наличия сигнала осуществляют, например, путем формирования комплексной корректирующей величины, равной произведению корреляционного отклика максимума решающей функции предыдущего этапа на коэффициент корреляции, зависящий от модуля разности временных задержек (положений) корректируемого корреляционного отклика и максимума решающей функции предыдущего этапа, вычитания сформированной комплексной корректирующей величины из комплексного корреляционного отклика предыдущего этапа, умножения результата вычитания на множитель, зависящий от коэффициента корреляции, в результате получая скорректированный комплексный корреляционный отклик.
Блок определения числа и временных задержек компонент многолучевого сигнала 25, реализующий данный способ, представлен на фиг.5, где обозначено:
15 - квадратурный коррелятор,
16 - генератор ПСП,
17 - узел формирования порога,
20 - первый перемножитель,
21 - сумматор,
22 - второй перемножитель,
26 - узел памяти,
27 - первый коммутатор,
28 - первый элемент коррекции,
29 - второй коммутатор,
30 - второй элемент коррекции,
31 - узел определения временных задержек максимума решающей функции,
32 - узел сравнения максимума решающей функции с порогом.
Устройство определения числа и временных задержек компонент многолучевого сигнала 25 содержит узел памяти 26, квадратурный коррелятор 15, генератор ПСП 16, первый и второй выходы генератора ПСП 16, которые являются выходами опорного сигнала, соединены с соответствующими (третьим и четвертым) опорными входами квадратурного коррелятора 15, первый 20 и второй перемножители 22, выходы которых соединены со входами сумматора 21, узел формирования порога 17, вход управления состояния генератора ПСП 16 соединен с управляющим выходом блока управления 11, первый 27 и второй коммутатор 29, первый 28 и второй элементы коррекции 30, узел определения временных задержек максимума решающей функции 31, узел сравнения максимума решающей функции с порогом 32. Первый и второй входы узла памяти 26 являются сигнальными и соединены с входом устройства, первый и второй входы квадратурного коррелятора 15 являются сигнальными и соединены с первым и вторым выходами узла памяти 26. Первый и второй выходы комплексных корреляционных откликов пилот-сигнала квадратурного коррелятора 15 соединены с первыми входами первого и второго коммутаторов 27 и 29. Выход коммутаторов 27 и 29 соединен с первым и вторым входом соответствующего перемножителя 20, 22 и входом элемента коррекции 28, 30. Выход элементов коррекции 28, 30 является выходом синфазной и квадратурной составляющей скорректированных комплексных корреляционных откликов пилот-сигнала и соединены со вторым входом коммутатора 27, 29. Выход сумматора 21, который является выходом значений решающей функции, соединен с первым входом узла определения временных задержек максимума решающей функции 31, выход которого является выходом значения максимума решающей функции, и соединен с первым входом узла формирования порога 17 и первым входом узла сравнения максимума решающей функции с порогом 32. Второй вход узла сравнения максимума решающей функции с порогом 32 соединен с выходом значения порога узла формирования порога 17. Вход сигнала сброса квадратурного коррелятора 15, управляющие входы первого и второго коммутаторов 27, 29, входы синхронизации первого и второго элементов коррекции 28, 30, вход синхронизации узла определения максимума решающей функции 31, вход синхронизации узла формирования порога 17, вход синхронизации узла сравнения максимума решающей функции с порогом 32, управляющий вход узла памяти 26 объединены и соединены с управляющими выходами блока управления 11. Выход узла определения временных задержек максимума решающей функции 31, который является выходом оценки временных позиций (задержек) компонент многолучевого сигнала, и выход сигнала превышения порога узла сравнения максимума решающей функции с порогом 32 объединены и соединены с входами блока управления 11.
Работает такое устройство следующим образом.
Входной комплексный сигнал поступает на вход узла памяти 26, на другой вход которого поступает управляющий сигнал с блока управления 11. Узел памяти 26 запоминает и хранит отсчеты входного комплексного сигнала обнаруженных временных областей наличия сигнала. С выходов узла памяти 26 эти отсчеты поступают на первый и второй входы квадратурного коррелятора 15. На третий и четвертый входы квадратурного коррелятора 15 поступают синфазные и квадратурные составляющие опорного сигнала, поступающие с генератора ПСП 16. Временным положением опорного сигнала генератора ПСП 16 управляет сигнал блока управления 11. В квадратурном корреляторе 15 входной сигнал, поступающий из узла памяти 26, перемножается на опорный сигнал. Синфазные и квадратурные составляющие результатов перемножения накапливаются, формируя комплексные корреляционные отклики пилот-символов.
На первом этапе с выходов квадратурного коррелятора 15 синфазные и квадратурные составляющие этих откликов через коммутаторы 27 и 29 поступают на входы перемножителей 20 и 22 и на входы элементов коррекции 28 и 30. Элементы коррекции 28 и 30 используются на последующих этапах. С выходов перемножителей 20 и 22 квадраты синфазной и квадратурной составляющих корреляционных откликов поступают на входы сумматора 21. Выходной сигнал сумматора 21, представляющий собой последовательность значений решающей функции в заданных дискретных временных позициях области, поступает на вход узла определения временных задержек максимума решающей функции 31. Узел определения временных задержек максимума решающей функции 31 находит временную позицию максимума решающей функции области первого этапа, информация о которой поступает с выхода узла 31 в блок управления 11. Блок управления 11 устанавливает однолучевой приемник 6 во временную позицию максимума решающей функции первого этапа области.
Для проведения последующих этапов определения временных позиций компонент многолучевого сигнала данной временной области наличия сигнала с выхода узла определения временных задержек максимума решающей функции 31 значение максимума решающей функции первого этапа поступает на вход узла формирования порога 17. Узел формирования порога 17 по значению максимума решающей функции первого этапа формирует значение порога, который поступает на узел сравнения максимума решающей функции с порогом 32 и будет использоваться на последующих этапах.
На последующих этапах элементы коррекции 28 и 30 последовательно корректируют значения синфазных и квадратурных составляющих комплексных корреляционных откликов для заданных временных позиций области в соответствии с информацией о временных задержках максимума решающей функции предыдущего этапа, поступающей с блока управления 11. Скорректированные значения решающей функции через коммутатор 27 и 29 поступают на входы перемножителей 20 и 22. Управление коммутатором 27 и 29 осуществляется сигналом с блока управления 11, поступающим на его управляющий вход. На первом этапе коммутаторы 27 и 29 пропускают выходные сигналы квадратурного коррелятора 15, на последующих этапах - выходные сигналы элементов коррекции 28 и 30. В перемножителях 20 и 22 рассчитываются квадраты синфазной и квадратурной составляющих скорректированных корреляционных откликов, которые поступают на входы сумматора 21. Выходной сигнал сумматора 21, представляющий собой значение решающей функции текущего этапа, поступает на вход узла определения временных задержек максимума решающей функции 31. С выхода узла определения временных задержек максимума решающей функции 31 значение максимума решающей функции текущего этапа поступает на вход узла сравнения максимума решающей функции с порогом 32. Результат сравнения поступает на блок управления 11.
Если порог превышен, блок управления 11 устанавливает однолучевой приемник 6 текущего этапа во временную позицию максимума решающей функции этого этапа области наличия сигнала и переходят к следующему этапу. Информация о временной позиции максимума решающей функции текущего этапа в блок управления 11, как и для первого этапа, поступает с выхода узла определения временных задержек максимума решающей функции 31.
Если порог не превышен, то определение позиций компонент многолучевого сигнала (установку однолучевых приемников 6) данной области наличия сигнала прекращают и переходят к поэтапной процедуре для следующей области.
Синхронизация узла формирования порога 17, узла сравнения максимума решающей функции с порогом 32 и узла определения временных задержек максимума решающей функции 31 осуществляется управляющими сигналами с блока управления 11.
Блок управления 11 осуществляет синхронную работу всех блоков устройства. Такой блок управления с описанными функциональными связями является типичным и может быть реализован на современных микропроцессорах цифровой обработки сигналов (DSP), например, TMS 320Схх, Motorola 56xxx, Intel и т.п.
Пример реализации элемента коррекции 28 (30) представлен на фиг.6, где обозначено:
33 - первый перемножитель,
34 - элемент расчета 
35 - элемент памяти,
36 - вычитатель а - b,
37 - второй перемножитель,
38 - элемент расчета β,
39 - регистр.
Элемент коррекции 28 (30) на очередном текущем этапе работает следующим образом.
Синфазные (или квадратурные) составляющие комплексных корреляционных откликов области предыдущего этапа поступают на вход элемента памяти 35, на другой вход которого поступает управляющий сигнал с блока управления 11. Элемент памяти 35 запоминает и хранит синфазные (или квадратурные) составляющие комплексных корреляционных откликов области предыдущего этапа. По сигналу управления с блока управления 11 элемент памяти 35 передает на вход регистра 39 синфазную (или квадратурную) составляющую комплексного корреляционного отклика, соответствующего максимальному значению решающей функции предыдущего этапа. Значение этой синфазной (или квадратурной) составляющей комплексного корреляционного отклика запоминается в регистре 39. По сигналу управления с блока управления 11 элемент памяти 35 последовательно выдает на свой выход синфазные (или квадратурные) составляющие комплексных корреляционных откликов области предыдущего этапа, которые поступают на вход вычитателя 36. На другой вход вычитателя 36 с перемножителя 37 поступает результат перемножения значения синфазной (или квадратурной) составляющей комплексного корреляционного отклика, хранимого в регистре 39, и коэффициента корреляции, рассчитываемого в элементе расчета β 38.
Величина коэффициента β рассчитывается, как sinc(•) от разности между положением максимума решающей функции и временным положением текущего корреляционного отклика. Информация о положении (временных задержек) максимума решающей функции и временном положении (временных задержек) текущего корреляционного отклика поступает на элемент расчета β 38 с блока управления 11. Выходной сигнал вычитателя перемножается на величину  в перемножителе 33. Величина k рассчитывается в элемент расчета
в перемножителе 33. Величина k рассчитывается в элемент расчета  34, в который поступает значение величины β с элемента расчета β 38. Выходной сигнал перемножителя 33 представляет собой последовательность скорректированных синфазных (или квадратурных) составляющих комплексных корреляционных откликов области и является выходным сигналом элемента коррекции 28 (30).
34, в который поступает значение величины β с элемента расчета β 38. Выходной сигнал перемножителя 33 представляет собой последовательность скорректированных синфазных (или квадратурных) составляющих комплексных корреляционных откликов области и является выходным сигналом элемента коррекции 28 (30).
Общую синхронизацию элемента коррекции осуществляет блок управления 11.
На фиг.7 приведены полученные с помощью компьютерного моделирования кривые зависимости вероятности ошибки на двоичный символ от отношения сигнал-шум на двоичный символ для заявляемого способа (предлагаемого способа приема многолучевого сигнала, использующего предлагаемый способ определения числа и временных позиций компонент многолучевого сигнала) и способа-прототипа (способа-прототипа приема многолучевого сигнала, использующего способ прототипа определения числа и временных позиций компонент многолучевого сигнала).
Моделирование было выполнено для двухлучевого канала. Предполагалось, что сигналы каждого луча неразрешаемы, федингуют независимо и имеют одинаковую среднюю мощность. Временное расстояние между сигналами лучей - 3/4 чипа (0.61 мкс). Принимаемый сигнал представлял собой последовательность информационных фазоманипулированных символов и пилот-символов с разными кодовыми последовательностями. Скорость движения мобильного абонента - 100 км/час. Временная подстройка временных позиций однолучевых приемников осуществлялась периодически с периодом 1.67 мс.
На фиг.7 кривая "способ прототип" соответствует случаю, когда временное расстояние между временными положениями опорных сигналов соседних однолучевых приемников способа-прототипа составляет один чип ПСП. Как видно из фиг.7, применение заявляемого способа позволяет получить существенно более качественные по сравнению со способом прототипа характеристики приема (выигрыш составляет 1,5-2 дБ).
Если временное расстояние между временными положениями опорных сигналов соседних однолучевых приемников кластера способа прототипа составляет половину чипа ПСП, кривые помехоустойчивости заявляемого способа и способа прототипа совпадают. Однако в этом случае способ прототип требует использования трех однолучевых приемников, тогда как заявляемый способ требует в среднем 1,8 однолучевых приемников, т.е. заявляемый способ позволяет уменьшить сложность многолучевого приемника в 1,7 раза.
Изобретение относится к области радиотехники, в частности к способам приема многолучевого сигнала в системах связи с кодовым разделением каналов, и может использоваться в приемных устройствах базовой и мобильной станций. Достигаемый технический результат - повышение помехоустойчивости и увеличение емкости системы связи при приеме многолучевого сигнала с кластерной структурой за счет оптимизации числа и временных положений опорных сигналов используемых однолучевых приемников. Отличительной особенностью данного изобретения является периодическая оценка числа используемых однолучевых приемников, временные положения опорных сигналов которых могут принимать достаточно близкие значения (менее одного чипа ПСП). 3 с. и 4 з.п.ф-лы, 7 ил.
| СПОСОБ ПРИЕМА МНОГОЛУЧЕВЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2120180C1 |
| СПОСОБ ПРИЕМА МНОГОЛУЧЕВОГО СИГНАЛА | 2000 |
|
RU2168274C1 |
| СПОСОБ КВАЗИКОГЕРЕНТНОГО ПРИЕМА СИГНАЛА | 1999 |
|
RU2174743C2 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| US 5490165 A, 06.02.1996 | |||
| Цифровые радиоприемные системы/Под ред | |||
| М.И | |||
| ЖОДЗИШСКОГО | |||
| - М.: Радио и связь, 1990, с.25-27. | |||
