Изобретение относится к измерительной технике, а именно к лазерной, волоконной интерферометрии, и может быть использовано для контроля геометрических параметров сложнопрофильных, корпусных деталей изделий (объектов) на координатно-измерительных машинах (КИМ) в станко-, приборо- и машиностроении.
В настоящее время для координатных измерений изделий на КИМ наибольшее распространение получили контактные методы (аналоги) с использованием контактных измерительных головок /1, 2/. Суть контактного метода заключается в том, что при соприкосновении круглого наконечника измерительной головки с поверхностью детали у первой изменяется параметр измерительной цепи). В момент фиксации такого изменения контролируемого параметра происходит определение, считывание трех координат X, Y, Z фиксируемой точки.
В качестве контролируемого параметра могут выступать частота микроколебаний наконечника, изгиб, индуктивность и сопротивление электрической цепи. Последний параметр из-за простоты используется чаще всего, при этом касание с деталью приводит к разрыву электрической цепи.
Известна головка /2/ (устройство-аналог) состоит из корпуса, в основании которого через 120° установлены три пары шариков, фланца, к которому прикреплен измерительный наконечник, состоящий из стержня и контактного элемента. Базирование фланца в корпусе осуществляется посредством трех роликов, прикрепленных на торце фланца также через 120° и сопряженных с тремя призмами, образованными из шариков. Ролики и шарики одновременно являются электроконтактами, соединенными в последовательную цепь. Фланец прижат пружиной. Разъем и гайка предназначены для соответственно электрического и механического подсоединения к КИМ.
При соприкосновении наконечника с деталью фланец поворачивается относительно оси, перпендикулярной оси головки, или перемещается вдоль оси. Вследствие этого размыкается по крайней мере один электроконтакт, что используется для образования управляющего сигнала. Головки чувствительны в различных направлениях в полупространстве ±Х ±Y +Z (180 телесных градусов). Измерительный наконечник не может смещаться и головка не чувствительна в направлении -Z.
К основным недостаткам контактного способа и устройства следует отнести низкую скорость измерений и различную чувствительность в разных направлениях (анизотропия чувствительности).
Известен способ контроля оптического взаимодействия с объектом /3/ (способ-аналог), заключающийся в том, что направляют на объект когерентное излучение, после взаимодействия с объектом регистрируют это излучение интерференционным индикатором с акустооптическим преобразователем, выделяют компоненты выходного сигнала этого преобразователя с различными частотами, подают их на фотодиодный смеситель, по выходному сигналу которого определяют результаты взаимодействия с объектом, направляют и принимают указанное излучение посредством волоконно-оптического преобразователя, между торцом которого и объектом создают зазор, значение которого включает пространственный интервал, соответствующий частотному перескоку выходного сигнала фотодиодного смесителя, который по цепи обратной связи подают на акустооптический модулятор.
Устройство, реализующее этот способ контроля (устройство-аналог), состоит из лазера, коллиматора, акустооптического модулятора, схемы ввода-вывода излучения для оптических волокон, волоконно-оптический преобразователь, элементов оптической схемы интерферометра, фотоприемника, управляемого фазового детектора, усилителя, генератора, управляемого напряжением, импульсного формирователя и устройства управления.
Особенность данного способа контроля заключается в возможности создания виртуальной пространственно-чувствительной координаты и формирования импульсного электрического сигнала, который несет в себе информацию о пересечении поверхности объекта этой координаты - виртуальное "касание" измерительной головки и детали.
Эти способ и устройство обладают высоким быстродействием ≈ 1-5 мкс и точностью ≈ 0,1-0,5 мкм при формирования импульсного сигнала /4/.
Недостатками способа и устройства является ограничение функциональных возможностей, определяемое как одномерной диаграммой направленности (вдоль оси волоконно-оптического преобразователя), ограничивающей размерность головки до 1-D ("ощупывание" детали только в направлении оси волоконно-оптического преобразователя), так и классом шероховатости поверхности контролируемых деталей Ra≤0,4λ , где λ - длина волны света.
Наиболее близким по технической сущности к предлагаемому изобретению является способ контроля оптического взаимодействия с объектом /5/ (способ-прототип), который заключается в том, что используют интерферометр Майкельсона с оптическим измерительным каналом, задают оптические параметры этого интерферометра, формируют в нем опорный и измерительный оптические потоки, между которыми задают разность хода, освещают объект и принимают отраженный от объекта оптический поток в виде светового луча оптическим измерительным каналом и создают одномерную диаграмму направленности, задают разность хода для опорного и отраженного от объекта оптических потоков, пространственно совмещают опорный и отраженный от объекта оптические потоки и добиваются их интерференции, осуществляют фотоэлектрическое преобразование интерферирующих оптических потоков в выходной электрический сигнал, измеряя его значение, контролируют значение оптического взаимодействия с объектом.
Бесконтактная измерительная головка, реализующая этот способ-прототип, состоит из линзы, измерительной схемы и интерферометра Майкельсона с электрическими входом, выходом и оптическим измерительным каналом. К электрическому выходу интерферометра Майкельсона подключена измерительная схема, выход которой является электрическим выходом бесконтактной измерительной головки, электрическим входом которой является электрический вход интерферометра Майкельсона. Линза связана с оптическим измерительным каналом интерферометра Майкельсона.
Это устройство предназначено для измерения перемещений в малом диапазоне и представляет собой конструкцию широко известного волоконного интерферометра белого света, контраст (видность) выходного оптического сигнала которого максимален при равенстве длин опорного и измерительного каналов /6/.
Такого типа интерферометры могут работать с зеркальными и с диффузными поверхностями /7/, на основе слабокогерентных источников света и многомодовой элементной базе /8, 9/.
Достоинствами данного способа- и устройства-прототипа, в сравнении с аналогом, являются упрощение конструкции и расширение функциональных возможностей за счет использования многомодового режима работы интерферометра и снижения требований как к оптическим параметрам (спектр, частотный и модовый состав) излучателя, так и шероховатости поверхности контролируемого объекта.
Однако основным недостатком способа- и устройства-прототипа является ограничение функциональных возможностей, определяемое одномерной диаграммой направленности, не позволяющее достичь размерности при координатных измерениях выше, чем 1-D ("ощупывание" детали только в направлении оси устройства).
Предлагаемое изобретение направлено на достижение технического результата, который заключается в расширении функциональных возможностей за счет расширения диаграммы направленности и соответственно увеличения размерности при проведении координатных измерений до трехмерной - 3D.
Согласно изобретению указанный результат достигается тем, что используют интерферометр Майкельсона с оптическим измерительным каналом, задают оптические параметры этого интерферометра, формируют в нем опорный и измерительный оптические потоки, между которыми задают разность хода, освещают объект и принимают отраженный от объекта оптический поток в виде светового луча оптическим измерительным каналом и создают одномерную диаграмму направленности, задают разность хода для опорного и отраженного от объекта оптических потоков, пространственно совмещают опорный и отраженный от объекта оптические потоки и добиваются их интерференции, осуществляют фотоэлектрическое преобразование интерферирующих оптических потоков в выходной электрический сигнал, измеряя его значение, контролируют значение оптического взаимодействия с объектом, расширяют диаграмму направленности за счет дополнительного излучения и приема оптического потока в двух взаимно перпендикулярных направлениях относительно оси оптического измерительного канала интерферометра Майкельсона, создают трехмерную диаграмму направленности, по максимальному значению выходного электрического сигнала судят об экстремальном значении оптического взаимодействия.
Способ отличается также тем, что изменяют разность хода между опорным и измерительным оптическими потоками.
Другое отличие способа состоит в том, что изменяют оптические параметры интерферометра Майкельсона и формируют в оптическом измерительном канале светоделитель, вводят интерферометр Фабри-Перо в опорный оптический поток интерферометра Майкельсона, делят этот поток на две компоненты, добиваются их интерференции и задают между ними разность хода плечей.
Способ отличается также тем, что изменяют разность хода плечей между двумя интерферирующими компонентами опорного оптического потока.
Соответственно бесконтактная измерительная головка (устройство), осуществляющая предлагаемый способ, состоит из линзы, измерительной схемы и интерферометра Майкельсона с электрическими входом, выходом и оптическим измерительным каналом, при этом к электрическому выходу интерферометра Майкельсона подключена измерительная схема, выход которой является электрическим выходом бесконтактной измерительной головки, электрическим входом которой является электрический вход интерферометра Майкельсона, причем линза связана с оптическим измерительным каналом интерферометра Майкельсона, а линза выполнена в виде шарообразного диффузора.
Другим отличием устройства является то, что интерферометр Майкельсона содержит модулятор, оптический разветвитель с измерительным, опорным, входным и выходным оптическими каналами; при этом излучатель, фотоприемник и модулятор оптически связаны соответственно со входным, выходным и опорным оптическими каналами; причем электрический выход фотоприемника является электрическим выходом интерферометра Майкельсона, а оптический измерительный канал разветвителя является оптическим измерительным каналом интерферометра Майкельсона, при этом электрический вход модулятора является электрическим входом интерферометра Майкельсона.
Полученные новые свойства от данной совокупности признаков ранее не были известны и достигаются только в данном изобретении.
Описание изобретения поясняется графическим материалом.
На фиг.1 представлены оптическая схема предлагаемого устройства (а) и процесс формирования пространственно-чувствительной сферической поверхности (б).
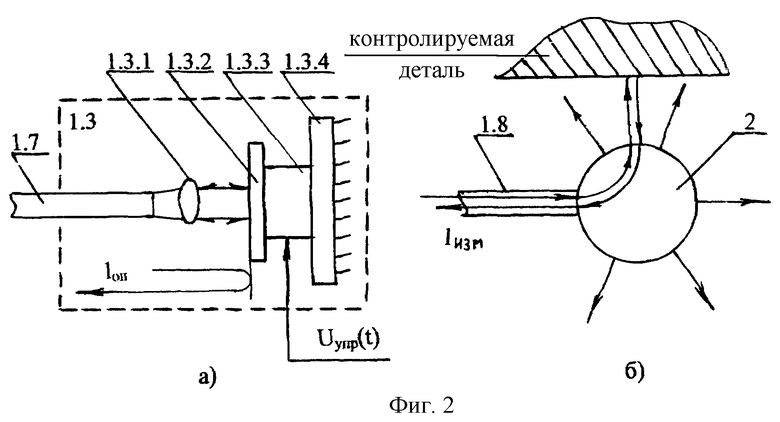
Фиг.2 демонстрирует ход оптических лучей в модуляторе (а) и по пути измерительный канал - контролируемая деталь (б) при реализации способа контроля на основе интерферометра Майкельсона.
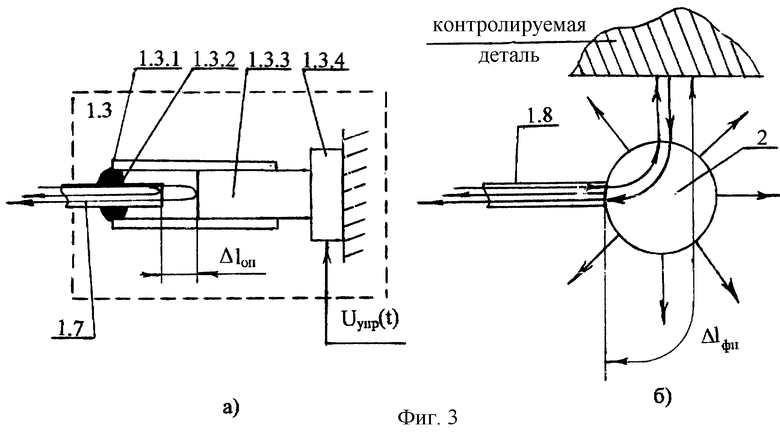
На фиг.3 показан ход оптических лучей в модуляторе (а) и по пути измерительный канал - контролируемая деталь (б) при реализации способа контроля на основе интерферометра Майкельсона с двумя оптически связанными разбалансированными интерферометрами Фабри-Перо.
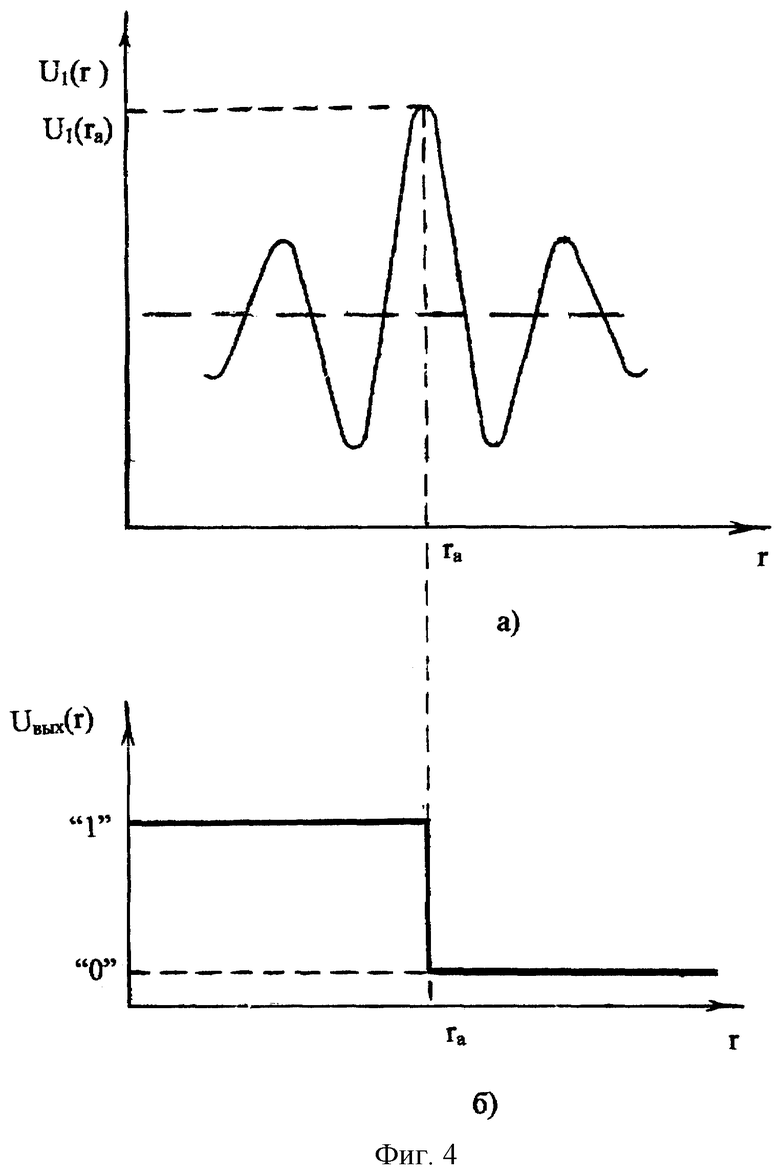
Фиг.4, а и б иллюстрирует сигналы на выходах фотоприемника U1(r) и измерительной схемы Uвых(r) вблизи нулевой разности хода в интерферометре Майкельсона.
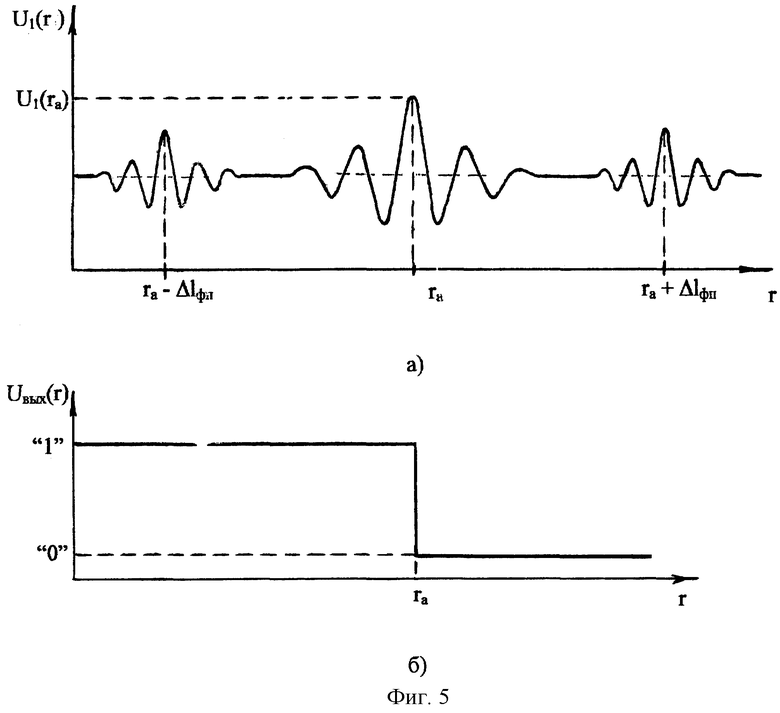
На фиг.5, а и б показаны сигналы на выходе фотоприемника U1(r) и измерительной схемы Uвых(r) при реализации способа контроля на основе интерферометра Майкельсона с двумя оптически связанными разбалансированными интерферометрами Фабри-Перо.
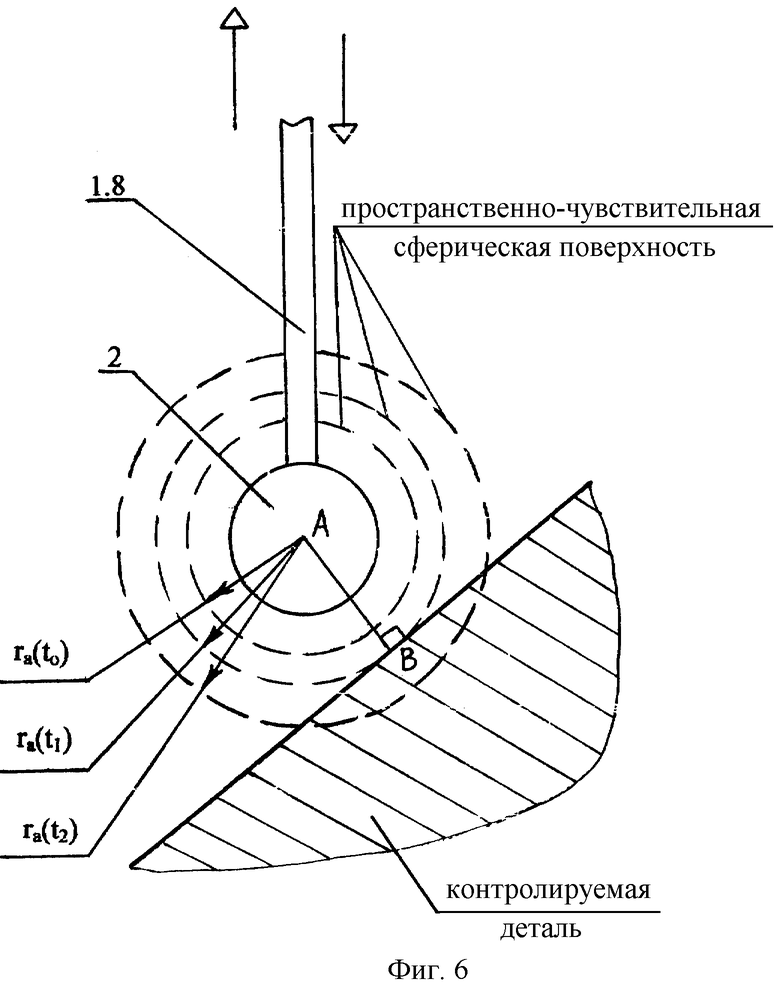
Фиг.6 демонстрирует режим ощупывания объекта при формировании подвижной пространственно-чувствительной сферической поверхности.
Бесконтактная измерительная головка (устройство) содержит следующие элементы (фиг.1): интерферометр Майкельсона 1, состоящий из излучателя 1.1, фотоприемника 1.2, модулятора 1.3, разветвителя 1.4 и связанных с ним оптических каналов - входного 1.5, выходного 1.6, опорного 1.7 и измерительного 1.8; линза (шарообразный диффузор) 2, измерительная схема 3.
Конструкция модулятора 1.3 может быть двух типов:
а) при реализации способа контроля на основе интерферометра Майкельсона - линза 1.3.1, зеркало 1.3.2, пьезопривод 1.3.3 и неподвижная подложка 1.3.4 (фиг.2а).
б) при реализации способа контроля на основе интерферометра Майкельсона с двумя оптически связанными разбалансированными интерферометрами Фабри-Перо - трубка 1.3.1, клей 1.3.2, световод с полупрозрачным покрытием торца (подвижный световод) 1.3.3, пьезопривод 1.3.4 (фиг.3а).
Устройство (фиг.1), реализующее предлагаемый способ контроля на основе интерферометра Майкельсона, работает следующим образом.
В интерферометре Майкельсона 1 оптический поток (излучение) от излучателя 1.1 вводится во входной канал 1.5 и распространяется к разветвителю 1.4, в котором он делится на две части, следующие как в опорный 1.7, так и в измерительный 1.8 каналы. Источник 1.1 обладает спектром излучения в диапазоне [λ 1; λ 2] и определяет длину когерентности lког согласно выражению

где λ о, λ 1, λ 2, - значения средней, нижней и верхней длин волн спектра излучения.
Значение lког выбирается из условия lког≈(3-5)λ o. Излучение, следующее от разветвителя 1.4 по опорному оптическому каналу 1.7, проходит в модулятор 1.3 (фиг.2а). В нем оно направляется линзой 1.3.1 на зеркало 1.3.2, отражается назад и возвращается по опорному каналу 1.7 к разветвителю 1.4. Общая длина хода лучей в опорном оптическом канале 1.7 составляет lоп.
Другая часть излучения после разветвителя 1.4 следует по измерительному оптическому каналу 1.8 до линзы 2, проходит сквозь нее и излучается в окружающее пространство в пределах 2π тел. рад. Часть этого излучения освещает контролируемую деталь (объект), отражается от нее, повторно проходит сквозь линзу 2 и далее по измерительному оптическому каналу 1.8 к разветвителю 1.4.
Оптические параметры интерферометра Майкельсона (диапазон длин волн [λ 1; λ 2], показатель преломления измерительного оптического канала Пик, показатель преломления линзы nл и другие) выбраны такими, чтобы оптический измерительный поток проходил через границу “измерительный оптический канал-линза” (туда и обратно) полностью (без потерь), а потери на отражение от этой границы были пренебрежимо малы. Общая длина хода лучей в измерительном оптическом канале 1.8 составляет lизм (фиг.2б).
После прохождения разветвителя 1.4 оптические потоки опорного и измерительного оптических каналов пространственно совмещаются в выходном оптическом канале и интерферируют на входе фотоприемника 1.2. Последний осуществляет фотоэлектрическое преобразование интерферирующих потоков и формирует выходной электрический сигнал U1(r) (фиг.4а), поступающий на вход измерительной схемы 3. Она преобразовывает максимальное значение функции U1(r) в логический перепад “1”→ “0” (или “0”→ “1”) функции Uвых(r) (фиг.4б):

где l(r-rа) - функция логических выходных сигналов, аналогичная функции Хэвисайда, rа - радиус пространственно-чувствительной сферы.
Так как функция U1(r) (фиг.4а) имеет единственный максимум на координате rа, соответствующий нулевой разности хода (Δ l=lоп-lизм=0) лучей в обоих оптических каналах, и на выходе линзы 2 формируется волновой фронт в угловом секторе α =2π тел. рад., то это приводит к образованию пространственно-чувствительной сферы с радиусом rа (фиг.1б).
Таким образом, в процессе контроля при сближении устройства и контролируемого объекта, поверхность детали может "виртуально касаться" с любой точкой пространственно-чувствительной сферы в угловом секторе α =2π тел. рад. В момент "виртуального касания" измерительная схема 3 (в зависимости от начального состояния) сформирует импульсный перепад логического выходного сигнала.
Выше представлено описание работы устройства, реализующего предлагаемый способ контроля, использование которого предпочтительно для объектов, поверхность которых имеет высокий коэффициент отражения kотр и низкое значение шероховатости поверхности Ra - детали с поверхностями, близкими к зеркальным.
Однако при работе с объектами, поверхность которых имеет низкий коэффициент отражения kотр и большое значение шероховатости поверхности Ra, предпочтительно устройство (описано ниже), также реализующее предлагаемый способ контроля, но на основе интерферометра Майкельсона с двумя оптически связанными разбалансированными интерферометрами Фабри-Перо.
Отличие работы устройства от описанного выше заключается в следующем.
Модулятор 1.3, используемый в опорном канале 1.7, представляет собой интерферометр Фабри-Перо, в котором задается разность хода плечей Δ lоп (фиг.3а).
Оптические параметры интерферометра Майкельсона (диапазон длин волн [λ 1; λ 2], показатель преломления измерительного оптического канала Пик, показатель преломления линзы nл и другие) подобраны в такой комбинации, чтобы граница “измерительный оптический канал-линза” выполняла роль светоделителя, другими словами, чтобы значительная (до половины) часть излучения измерительного оптического потока отражалось от этой границы (по пути из интерферометра к линзе) (фиг.3б). Такое создание дополнительного светоделителя приводит к формированию в измерительном оптическом канале интерферометра Фабри-Перо, в котором первым светоделителем является граница “измерительный оптический канал-линза”, а вторым - поверхность контролируемой детали. Для такого случая разность хода плечей равна Δ lфп (фиг.3б).
В связи с тем, что оба указанных интерферометра Фабри-Перо в опорном и измерительном оптических каналах являются оптически связанными, то выходной сигнал фотоприемника 1.2 U1(r) (фиг.5а) имеет вид с явно выраженными боковыми максимумами (на координатах rа-Δ lфп и rа+Δ lфп), отстоящими от главного максимума, расположенного на нулевой разности хода (координата rа).
Главный максимум сигнала U1(r) также используется для образования пространственно-чувствительной сферической поверхности с радиусом rа. Фиксация этого максимума в процессе измерений означает “виртуальное касание” с поверхностью детали и позволяет создать с помощью измерительной схемы 3 логический перепад “1”→ “0” (или “0”→ “1”) функции Uвых(r) (фиг.4б).
Таким образом, бесконтактная измерительная головка на основе интерферометра Майкельсона с двумя оптически связанными разбалансированными интерферометрами Фабри-Перо также реализует предлагаемый способ контроля оптического взаимодействия с объектом.
Использование модулятора 1.3, одной из хорошо известных конструкций /10-12/, и введение управляющего сигнала Uупр(t) на его вход позволяет управлять разностью хода lоп (фиг.2а) или разностью хода плечей Δ lоп (фиг.2б) в опорном оптическом канале. Такой режим работы приводит к управляемому смещению пространственно-чувствительной координаты rа, что соответствует управляемому расширению-сжатию - "как бы дыханию" пространственно-чувствительной сферической поверхности. Такой режим ускоряет координатные измерения на КИМ изделий с криволинейными профилями поверхности. На фиг.6 представлен режим работы для такого режима при различных значениях Uупр(t):Uупр(to)→ ra(tо), Uупр(t1)→ ra(t1) и Uупр(t2)→ ra(t2).
Сущность предлагаемого способа контроля оптического взаимодействия с объектом заключается в следующем.
1. Известно /6/, что для интерферометров Майкельсона со слабокогерентным излучателем (интерферометры белого света) контраст (видность) интерференционного сигнала биений достигает единственного максимума (экстремума) при нулевой разности хода в опорном lоп и измерительном lизм каналах: (Δ l=lоп-lизм=0).
Это экстремальное значение электрического сигнала эквивалентно созданию пространственно-чувствительной координаты lа. Фиксация момента прохождении объекта через эту координату lа означает ее “виртуальное касание” с поверхностью объекта.
Область применения таких интерферометров Майкельсона ограничиваются высокоотражающими или полированными поверхностями, близкими к зеркальным /13/. Для расширения области применения и перехода к работе с объектами с низкоотражающими или шероховатыми поверхностями предлагается использовать интерферометр Майкельсона с двумя оптически связанными разбалансированными интерферометрами. Такие конструкции хорошо исследованы в /5, 8, 9, 14/. В данном способе в качестве разбалансированных интерферометров предлагается использовать интерферометр Фабри-Перо. Поэтому интерферограмма и соответственно выходной сигнал U1(r) такого устройства будут содержать явно выраженные боковые максимумы, расположенные симметрично относительно главного, расположенного на нулевой разности хода (Δ lоп-Δ lфп=0) плечей (фиг.5а) /8, 15/.
Главный максимум сигнала U1(r) интерферометр Майкельсона на основе двух оптически связанных разбалансированных интерферометров Фабри-Перо. также используется для создания пространственно-чувствительной координаты lа.
2. Известны работы, в которых рассматриваются методы и средства расширения диаграммы направленности /16-18/. В данном способе предлагается в измерительном оптическом канале использовать линзу в виде шарообразного диффузора, которая расширит угловой сектор диаграммы направленности при излучении-приеме света дополнительно в двух взаимно перпендикулярных направления контроля и доведет ее до α =2π тел. рад. Это позволит создать в измерительном канале объемную трехмерную диаграмму направленности оптического излучения.
Возможности создания объемной шарообразной трехмерной диаграммы направленности оптического излучения и формирования пространственно-чувствительной координаты lа (при использовании интерферометра Майкельсона обоих выше рассмотренных конструкций) приводят к образованию пространственно-чувствительной сферической поверхности с радиусом rа(rа=lа). Эта пространственно-чувствительная сфера “чувствительна” к “касанию” в любой ее точке, а фиксация этого момента означает “виртуальное касание” пространственно-чувствительной сферы с поверхностью объекта.
3. Введение модулятора в опорное плечо интерферометра позволяет под действием управляющего сигнала Uупр(t) управлять разностью хода lоп(t) или разностью хода плечей Δ lоп(t) в опорном оптическом канале. Это осуществляется смещением в ту или иную сторону (в зависимости от знака сигнала Uупр(t)):
- зеркалом 1.3.2 под действием пъезопривода 1.3.3 (фиг.2а);
- подвижным световодом 1.3.3 под действием пъезопривода 1.3.4 (фиг.2б).
Используя это можно вводить коррекцию при изменениях оптических параметров устройства от воздействия внешних условий (температуры, влажности, давления и других) и осуществлять модуляцию радиуса ra(t) пространственно-чувствительной сферы. Такие движения схожи как бы с "дыханием" пространственно-чувствительной сферы (фиг.6) и используются для ускорения сканирования, ощупывания исследуемой поверхности объекта. При этом точка “виртуального касания”, точка В (при ra(t1) на фиг.6) принадлежит максимальному световому лучу - отрезок [АВ], направленный по нормали к поверхности контролируемого объекта, находящейся по касательной к пространственно-чувствительной сферической поверхности (фиг.6).
К настоящему времени в области оптических модуляторов фазы имеется значительное число конструкций годных для использования в предлагаемом способе /10-12/.
Практическое создание и использование шарообразных линз и диффузоров диаметром от 0,8 до 3 мм, обеспечивающих трехмерную диаграмму направленности, широко используется в медицине. В частности, широко применяются волоконно-оптические катетеры с шаровидными диффузорами для проведения эндоскопических и лапароскопических операций в урологии и гинекологии /19/.
Практическая реализация предлагаемых способа и устройства может быть осуществлена при использовании различных комбинаций из волоконно-оптических, интегрально-оптических и отдельных оптических элементов.
Для предлагаемого способа и устройства ожидаемая точность контроля достигает значений 0,01-0,1 мкм, что превышает точность используемых контактных измерительных головок. В связи с тем, что в предлагаемом устройстве пространственно-чувствительная поверхность имеет сферическую форму, его использование (все алгоритмы и программное обеспечение) при координатных измерениях сложнопрофильных и корпусных изделий на КИМ полностью идентично контактным головкам касания.
Источники информации
1. UK Patent №2049198 МПК G 01 В 7/03 Probe for use in measuring apparatus. Renishaw Electrical Limited (аналог).
2. Координатные измерительные машины и их применение / В. - А.А.Гапшис, А.Ю.Каспарайтис, М.Б.Модестов и др. - М.: Машиностроение, 1988, с.80 (аналог).
3. А.с. №1762117 МПК G 01 В 9/02 Способ контроля оптического взаимодействия с объектом. Телешевский В.И., Леун Е.В. Опубл. в БИ №34, 1992 (аналог).
4. Исследование адаптивной волоконной измерительной головки для бесконтактного измерения отклонений размеров деталей на основе управляемой акустооптоэлектронной обратной связи. Автореф. дис. канд. техн. наук. 05.11.16. - М.: Мосстанкин, 1994.
5. Yuan L. White-light interferometric fiber-optic strain sensor from three-peakwavelength broadband LED sourse. Applied Optics, 1997, v.36, №25, pp.6246-6250 (прототип).
6. Бутиков Е.И. Оптика. Учеб. пособие для вузов. / Под ред. Н.И.Калитеевского. - М.: Высшая школа, 1986 с.
7. А.с. №1758421, МКИ G 01 В 11/24. Способ определения профиля поверхности диффузно отражающих объектов и устройство для его осуществления. Хопов В.В. Опубл. в БИ №32, 1992.
8. Галкин С.Л., Игнатьев А.В., Бабаджан А.И. Волоконно-оптический датчик линейных перемещений. Приборы и системы управления. 1992, №2, с.24.
9. Gerges A.S., Newson T.P., Jackson D.A. Coherence tuned fiber optic sensing system, with self-initialization, based on a multimode laser diode. Applied Optics, 1990, v.29, №30, pp.4473-4479.
10. Модуляционные эффекты в волоконных световодах и их применение / Гуляев Ю.В., Меш М.Я., Проклов В.В. – М.: Радио и связь, 1991, - 152 с.
11. Волоконно-оптические датчики / Т.Окоси, К.Окамото, М.Оцу, Х.Нисихара и др.; Под ред. Т.Окоси, пер. с яп. - Л.: Энергоатомиздат, Ленинградское отделение, 1990.
12. Световодные датчики / Б.А.Красюк, О.Г.Семенов, А.Г.Шереметьев и др. - М.: Машиностроение, 1990. – 256 с.
13. Liu T.Y., Berwick M., Jackson D.A. Novel fiber-optic torsional vibrometers. 8th Optical Fiber Sensors Conference, pp.117-120.
14. Т.Li, A.Wang, К.Murphy, R.Claus White-light scanning fiber Michelson interferometer for absolute position-distance measurement. Optics Letters, 1995, v.20, №7, pp.785-787.
15. Шаров Е.М. Интерференционный метод измерения расстояния между полупрозрачными отражающими поверхностями. / Оптико-механическая поверхность, 1985, №8, с.13-14.
16. Fukshansky-Kazarinova N., Fukshansky L., Кuhl M., Jorgensen В.В. Theory of equidistant three-dimensional radiance measwements.with optical microprobes Applied Optics, 1996, v.35, №1, pp.65-73.
17. Fukshansky-Kazarinova N., Fukshansky L., Kuhl M., Jorgensen В.В. General theory of three-dimensional radiance measurements. with optical microprobes Applied Optics, 1996, v.35, №25, pp.6520-6528.
18. Hill P.C., Atkins G.R., Canning J., Cox G.C., Sceats M.G. Writing and visualisation of low-threshold type II Bragg grating in stressed optical fibers. Applied Optics, 1995, v.33, №33, pp.7689-7693.
19. Каталог многоразовых световодных инструментов для терапии. Институт прикладных проблем волоконной оптики при ИОФ РАН. 1999.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ОПТИЧЕСКОГО ВЗАИМОДЕЙСТВИЯ С ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2188389C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ИЗДЕЛИЯ, ВЫПОЛНЕННОГО С ВПАДИНАМИ И ВЫСТУПАМИ НА ПОВЕРХНОСТИ | 2015 |
|
RU2603516C1 |
| Способ измерения фазового сигнала двухлучевого волоконно-оптического интерферометра | 2019 |
|
RU2719635C1 |
| РАСПРЕДЕЛЕННАЯ ВОЛОКОННО-ОПТИЧЕСКАЯ СИСТЕМА РЕГИСТРАЦИИ ВИБРОАКУСТИЧЕСКИХ СИГНАЛОВ | 2011 |
|
RU2485454C2 |
| ОПТИЧЕСКИЙ ПРОФИЛОМЕТР | 1994 |
|
RU2085840C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ГРАНИЦЫ ОБЪЕКТА | 1999 |
|
RU2157964C1 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ МУЛЬТИПЛЕКСНАЯ СИСТЕМА РЕГИСТРАЦИИ ПЛОТНОСТИ ЭНЕРГИИ ВОЛН | 1994 |
|
RU2080567C1 |
| Способ настройки максимальной чувствительности волоконно-оптического гидрофона | 2015 |
|
RU2610382C1 |
| Способ определения разницы длин плеч в двухлучевом волоконно-оптическом интерферометре | 2017 |
|
RU2678708C1 |
| Способ исследования микрообъектов и ближнепольный оптический микроскоп для его реализации | 2016 |
|
RU2643677C1 |
Изобретение относится к измерительной технике, а именно к лазерной, волоконной интерферометрии, может быть использовано для контроля геометрических параметров корпусных объектов на координатно-измерительных машинах в станко-, приборо- и машиностроении. Способ оптического контроля геометрических параметров изделий заключается в создании трехмерной пространственно-чувствительной сферической поверхности с радиусом r2 в угловом секторе равном 2 π тел.рад. Эта поверхность выполняет роль измерительного наконечника измерительной головки. Момент “виртуального касания” этой поверхности с контролируемой деталью определяется по достижению выходным сигналом максимального значения. Введением управляющего сигнала можно корректировать изменения оптических параметров устройства от воздействия внешних условий (температуры, влажности, давления) или осуществлять модуляцию радиуса Δra пространственно-чувствительной сферы. Такие движения схожи как бы с “дыханием” пространственно-чувствительной сферы и могут использоваться для повышения скорости ощупывания исследуемой поверхности. Предлагаемый способ контроля позволяет работать как с полированными и высокоотражающими поверхностями, близкими к зеркальным, так и с шероховатыми, с малым коэффициентом отражения. Технический результат - расширение функциональных возможностей, измерение геометрических параметров, характеризующих объем изделий. 3 з.п. ф-лы, 6 ил.

| US 5457534, 10.10.1995 | |||
| US 5838448, 17.11.1998 | |||
| СПОСОБ ПРОИЗВОДСТВА ИГРИСТОГО ВИНА "ЭНОС" | 1993 |
|
RU2034914C1 |
| СПОСОБ РЕГИСТРАЦИИ ПОРЯДКА ИНТЕРФЕРЕНЦИИ | 1988 |
|
SU1561641A1 |
| СПОСОБ РЕГИСТРАЦИИ ИЗМЕНЕНИЙ ПОРЯДКА ИНТЕРФЕРЕНЦИИ | 1986 |
|
SU1410647A1 |
| СПОСОБ РЕГИСТРАЦИИ ИЗМЕНЕНИЙ ПОРЯДКА ИНТЕРФЕРЕНЦИИ | 1994 |
|
RU2065149C1 |

