Область техники
Настоящая группа изобретений относится к областям медицины, психологии и бытового использования, в частности:
1) оборудование (устройство) для медицинских целей, выполненное в форме собственно кресла (оно же многофункциональное кресло, далее «кресло») в профилактике, в лечении, и в диагностике заболеваний органов малого таза, в частности: предстательная железа, прямая кишка, анус, вагина, уретра, шейка матки, яичники, превагинальная область, а также для тренировки мышц влагалища и ануса, а также для проведения массажа бедер, ягодиц, крестца, поясницы, в том числе массажа биологически активных точек (БАТ) на перечисленных областях. А также в профилактике и в лечении психологических и психоэмоциональных отклонений и заболеваний связанных с сексуально-половой сферой. А также для массажа (стимуляции) половых органов, в целях сексуального возбуждения (сексуального удовлетворения);
2) оборудование (устройство) для управления программой и функциями кресла: «панель управления креслом», она же терминал управления, она же далее «ПУ»;
3) оборудование (устройство) для медицинских и иных целей: в виде комплекта наконечников, посредством которых, роботизированная система производит контактные процедуры с телом пациента;
4) к области автоматизации и программирования работы заявленного в настоящем изобретении оборудования, в частности создание программного обеспечения (далее «ПО») и панели управления (ПУ), а также интерфейса ПУ, посредством которых программируется (для автоматического и автоматизированного режима) и реализуется функционирование заявленного в изобретении оборудование;
5) к области создания инновационной технологии и метода организации рабочего места, и инновационного способа организации и методики лечебного процесса, для проведения медицинских диагностических, профилактических и лечебных процедур, в автоматическом, и автоматизированном режимах, при нахождении пациента на заявленном оборудовании (на кресле), и при нахождении врача(ей) удаленно.
6) к области организации лечебно-профилактических, диагностических, процедурных кабинетов, в том числе профилактико-тренировочных для женщин по повышению сексуального уровня, для развития сексуальной напряженности у женщин, путем тренировки мышц малого таза, развития эрогенных зон с высокими показателями реактивности, приобретения навыков сознательного управления мышцами влагалища, разработки эрогенной чувствительности рецепторов стенок влагалища, стимуляции кровообращения, усиления рецепторной чувствительности. А также для массажа (стимуляции) половых органов, в целях сексуального возбуждения (сексуального удовлетворения).
Уровень техники
1. Из существующего уровня техники известны: приспособления для массажа мышц поверхности тела, используемые в своем составе «кресло» со встроенными (как правило) роликовыми массажными элементами, с электромеханическим приводом:
- «массажное кресло»: RU 2135060 С1, заявка 98100825/12.20.01.1998, опубликовано 27.08.1999
- «КРЕСЛО ДЛЯ МАССАЖА» RU 2403005 С1, Заявка 2009108593/14, 10.03.2009, Опубликовано 10.11.2010 Бюл. №31
- «массажное кресло», RU (11) 2283077(13) С1, Заявка 2005114970/14, 17.05.2005, Опубликовано 10.09.2006 Бил. 25
- «многофункциональное кресло», RU (11) 2470565(13) С2, Заявка 2010119059/12, 14.05.2010, Опубликовано: 27.12.2012 Бюл. №36
Данные кресла приспособлены, как правило, для массажа мышц спины, реже задних поверхностей ног и шеи с затылком, еще реже рук.
Уровень автоматизации, программирования, и управления процессом, у разных представителей разный, но, в общем и целом, относительно низкий, элементарный, примитивный.
Кресел для лечебных, профилактических и диагностических процедур (в том числе массажа), полостей таза и областей паха, в существующем уровне техники, не найдено.
Недостатком данных технических решений является: невозможность проведения массажа и иных лечебных процедур, полостей малого таза.
2. Из существующего уровня техники известно: приспособление для программируемого автоматического массажа мышц поверхности тела, используемые в своем составе роботизированный манипулятор с возможностью программирования его работы: «способ массажа и устройство для его осуществления», RU (11) 2145833(13) С1, Опубликовано на CD-ROM: MIMOSA RFD 2000/003 MRFD2000003
Приспособлений, автоматизированных и роботизированных, для лечебных, профилактических и диагностических процедур (в том числе массажа), полостей таза и областей паха, в существующем уровне техники, не найдено.
Недостатком данного технического решения является: невозможность проведения массажа, других лечебных, и иных процедур, полостей малого таза.
3. Из существующего уровня техники известны: приспособления для лечения, массажем и другими видами физиотерапевтического воздействия, некоторых органов малого таза, имеющие в своем составе наконечники разной формы для введения в полый орган:
- устройство для лечения геморроя RU 2011137836 А;
- устройство мобильное для массажа (прямой кишки), RU 2008140279 А;
- устройство для лечения простатита, RU 2499589 С1, Заявка: 2012121800/14, 28.05.2012;
- устройство для массажа простаты, RU 2221541 С1, Заявка: 2002121125/14, 08.08.2002;
- Устройство для лечебного тепломассажного воздействия при простатите, RU 2119787 С1, 10.10.1998; С1, 10.10.1998;
- Массажное устройство для лечения простатита RU 2071753 С1, 20.01.1992;
- Устройство для лечебного тепломассажного воздействия при простатите, RU 2071752 С1, Заявка: 94 94025173, 04.07.1994;
- Массажный электроприбор, RU 2006134982 А;
- устройство для массажа полых органов, RU 2057514 С1, Заявка: 915008027, 08.06.1991; Устройство для лечения простатита (US 2057190 А, 13.10.1936 г.);
- Устройство для массажа (US 426536 А, 12.05.1981);
- Массажер (RU 2141302 С1, 20.11.1999);
- массажное устройство, RU 2058771 С1, Заявка: 894745402, 22.08.1989;
- Устройство для самомассажа предстательной железы (RU 2171665, 10.10.2001); массажный элемент, RU 2118526 С1, Заявка: 96114563/14, 22.07.1996;
- устройство для массажа полых органов, RU 2019168 С1, Заявка: 5006603/14, 08.07.1991;
- устройство для массажа, RU 2098067 С1, Заявка: 96105969/14, 26.03.1996;
- способ лечения хронического абактериального простатита, RU 2478408 С1, Заявка: 2012101002/15, 11.01.2012;
- устройство для массажа полых органов, RU 2271193 С2, Заявка: 2004116788/14, 02.06.2004;
- устройство для термомассажа и способ его проведения, RU 2519406 С1;
- способ лечения простатопатии и устройство для его осуществления, RU 2428223 С2, Заявка: 2009143151/14, 24.11.2009;
- вагинальное электродное устройство для электростимуляции, RU 2481867 С1, Заявка: 2012106084/14, 20.02.2012
Недостатками данных технических решений являются: - технология данных приспособлений предусматривает введение активного наконечника в полости тела вручную, медицинским работником или самим пациентом, что делает выдерживание технологии и качества процедуры субъективным; - невозможно использовать программирование процедуры, когда процедура проводится по четко заданной программе, по четко определенной методике, с четкоопределенных направлениях, с четко определенным нажимом; - невозможно зафиксировать объективно уровень нажатия и зафиксировать значение болевого порога (порог комфортности), что может быть информативно важным для процесса лечения, и определения дальнейших процедур, в том числе нагрузки (усилия) надавливания; механизм воздействия наконечников как правило узкоспециализирован, 1-2 физиотерапивтических фактора; нет возможности сбора диагностических параметров, например фиксация температуры, забор слизи, соскоба и пр.; отсутствие элементов диагностической эндоскопии; - если вводит пациент, ему неудобно, что негативно сказывается на качестве проведения лечебной процедуры; - в процессе процедуры пациент не может полностью расслабиться и сконцентрироваться на ощущениях.
Эта группа является наиболее близкой к заявленному в изобретении техническому решению.
4. Из существующего уровня техники известны: приспособления для стимуляции и тренировки мышц влагалища и таза:
- Пневматический тренажер-вагинатор, RU 2009100144 А;
- вагинальный тренажер, RU 105165 U1; устройство мобильное со звуковым сигналом для стимуляции мышц органов малого таза, RU 2503441 С2;
- вагинальный (пневматический) тренажер, RU 103470 U1; RU 105165 U1; RU 67446 U1; RU 67447 U1; RU 2371163 C1; RU 2008104206 А;
- Тренажер для укрепления мышц тазового дна RU 90680 U1;
- тренажер вагинальных мышц, RU 2307637 С2, Заявка: 2005103507/14, 11.02.2005;
- прибор для развития мышц тазового дна, RU 2307636 С1, Заявка: 2005140145/14, 22.12.2005
Недостатками данных технических решений являются: - вся процедура делается вручную, невозможно объективно фиксировать данные давления, в разных участках, процессе и в течении всей тренировки мышц вагины (ануса); - ограничена возможность массажа стенок вагины (ануса); - невозможность контролировать функциональность отдельно разных мышц; - невозможность использования одного наконечника как для вагины так и для ануса; невозможность программировать для автоматизации процесса тренировки.
4. Из существующего уровня техники известны: приспособления для массажа половых органов с целью сексуального стимулирования (возбуждения):
массажный прибор, RU 2510260 С2, Заявка: 2011101504/14, 16.06.2009; устройство для вибрационной стимуляции, RU 2020912 С1, Заявка: 5023798/14, 24.01.1992; стимулятор с гибкими элементами (варианты), RU 2509548 С2, Заявка: 2009145050/14, 26.11.2009; способ массажа половых органов и импульсный имитатор для его осуществления, RU 2644748 С2, Заявка: 2016112805, 04.04.2016.
Недостатками данных технических решений являются: - весь процесс основан на личном участии пациента в процедуре (собственными руками); - в процессе процедуры пациент не может полностью расслабиться и сконцентрироваться на ощущениях; варианты движения стимулирующего элемента сильно ограничены; - геометрия элемента, в процессе процедуры, (за исключением невыраженного) практически не изменяется, невозможность изгиба стимулирующего элемента в каком-либо направлении; - невозможно разрабатывать и реализовывать (использовать) программы автоматической стимуляции; ограниченное количество факторов физического воздействия; невозможность реализации автоматических возвратно-поступательных, вращательных движений, или иных движений.
Задачами, на решение которой направлено заявляемая группа изобретений является:
- Сделать процесс большинства леченых процедур полых органов малого таза, полностью автоматизированными, и полностью или частично автоматическими.
- Реализовать проведение всех манипуляций процедуры усилиями роботизированного оборудования, под контролем врача автоматизировано, и/или по программе автоматически.
- Реализовать возможность управления автоматизированным процессом пациентом с панели управления, в удобной и комфортной позе.
- Разработать и использовать готовые (стандартные) программы для манипуляций со стандартными клиническими случаями, у пациентов со стандартной конституцией и строением органов.
- С помощью собственно кресла сделать положение пациента максимально удобным и комфортным, реализовать возможность различной ориентации кресла в горизонтальной плоскости.
- Использовать контактные элементы для манипуляций с телом (далее «наконечники») позволяющие производить не только массаж, но различные лечебные, профилактические процедуры, тренировки для мышц, а также диагностические процедуры, такие как: фиксирование температуры, взятие слизи, соскоба, биопсии с конкретного места полого органа, эндоскопия, УЗИ и пр.
- Реализовать механизм записи в электронном виде и сохранение в памяти ПО всех действий, манипуляций и параметров текущей процедуры, а также данных диагностики, с возможностью сопоставления с программой процедуры. В том числе запись и сохранение индивидуальной лечебной программы для индивидуального клинического случая. В том числе для определения выраженности лечебного эффекта конкретных лечебных манипуляций, в том числе для адекватного определения силы механического воздействия.
- Посредством функциональных возможностей программного обеспечения, реализовать механизм сохранения в запись процедуры, данных таких диагностических аппаратов, как, ЧСС, ЧДД, АД, ЭКГ, ЭЭГ, и т.д. Причем, такое относительно не сложное оборудование, как фиксация ЧСС, ЧДД и АД, может быть встроено в функционал кресла, а такое относительно сложное оборудование, как ЭКГ, ЭЭГ используется как стандартное, отдельное от кресла, но имеет специальную связь с оборудованием (ПО) кресла, для записи диагностических данных в ПО кресла.
- Реализация возможности врачу управлять процедурой, в ручном режиме реального времени, через панель управления врача, причем врач может находиться удаленно. Особо актуально для работы с клиентами, где нет врачей специалистов, но есть кресло, в том числе в круглосуточном режиме (дежурства), когда один специалист может обслуживать несколько кабинетов (с креслом), находящихся в разных регионах.
- Реализация возможности участия в процессе одновременно нескольких врачей из разных регионов.
- Реализовать систему (технологию) позволяющую обмен опытом и программами (лечебными, профилактическими, тренировочными), между врачами, работающими с креслом.
- Фиксировать и сохранять (запись в ПО) значения датчиков как диагностических (температура, пульс, экг и т.д_ так и функциональных (давление при тренировке мышц вагины, ануса)
- Разрабатывать и внедрять наконечники под любые, допустимые, виды физиотерапевтического воздействия, и под любые, допустимые, виды диагностики и сбора анализов.
- Повышение качества массажа стенок влагалища, шейки матки, и превагинальной области, прямой кишки, простаты, и ануса.
- Разработка и внедрение оборудования (в том числе наконечников) и технологий позволяющих проводить в автоматизированном режиме полифункциональные процедуры,
- Организация лечебно-диагностического и профилактико-тренировочного кабинета.
- Разработка и внедрение инновационных способов и технологий оборудования процедурных кабинетов
- Разработка и внедрение инновационных способов и технологий организации работы врачей работающих с заболеваниями органов малого таза, гинекологи, андрологии, урологи, психологи и т.д.
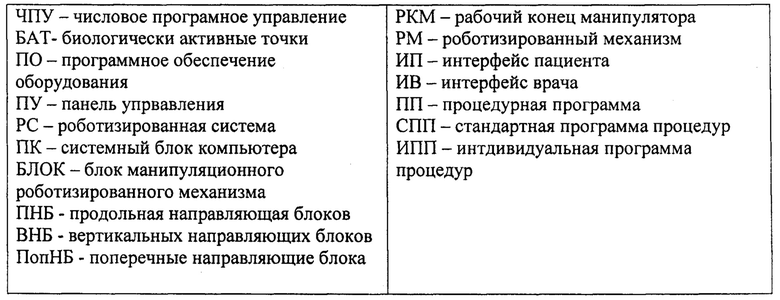
Обозначение сокращений:
Раскрытие сущности заявленной группы изобретений:
Заявленная группа изобретений состоит из:
1) Многофункционального роботизированного оборудования, с программным управлением (ЧПУ), в виде кресла с изменяющейся геометрией составных частей (оно же массажное кресло, оно же многофункциональное кресло, далее «кресло»), со сменными лечебными и диагностическими элементами (наконечниками).
Предназначенное для медицинских целей в профилактике, в лечении, и в диагностике заболеваний органов малого таза, в частности: предстательная железа, прямая кишка, анус, влагалище, уретра, шейка матки, яичники, превагинальная область. Также для тренировки мышц влагалища и ануса. Также для проведения массажа бедер, ягодиц, крестца, поясницы, в том числе массажа биологически активных точек (БАТ) на перечисленных областях. А также в профилактике и в лечении психологических и психоэмоциональных отклонений и заболеваний, связанных с сексуально-половой сферой. А также для массажа (стимуляции) половых органов, в целях сексуального возбуждения (сексуального удовлетворения).
2) Программное обеспечение для функционирования данного кресла (далее ПО), которое позволяет работать в автоматическом и автоматизированном режимах. При автоматическом режиме, перед процедурой, врачом выбирается или составляются программа процедуры. При автоматизированном режиме, всеми процессами в кресле управляют пациент (с панели управления пациента), или врач (с панели управления врача).
При этом оборудование может работать в следующих режимах:
а) в полностью автоматическом режиме, по заранее заданной программе, без вмешательства пациента и врача, при необходимости, под контролем пациента и/или врача, причем существует строго регламентированная возможность, позволяющая и пациенту и врачу вмешиваться в процесс процедуры в автоматическом режиме;
б) в автоматизированном режиме работы под контролем (под ручным управлением) пациента, через «панель управления пациента» (она же терминал пациента, далее «ПУ-пациента») монтированного воедино с креслом;
в) в автоматизированном режиме работы под контролем оператора-врача (далее врач), находящимся в одном помещении с оборудованием (с пациентом), через панель управления врача (она же терминал управления врача, далее «ПУ-врача») размещенного рядом с оборудованием, при этом связь ПУ-врача с креслом реализуется напрямую через интернет-кабель;
г) в автоматизированном режиме работы под контролем оператора-врача, находящимся удаленно, через ПУ-врача, размещенного удаленно, при этом, при этом связь ПУ-врача с креслом реализуется через сеть интернет.
3) Осуществления различных способов проведения лечебных, профилактических, тренировочных, диагностических и иных процедур, в автоматическом и автоматизированном режиме, с использованием с использованием инновационных, многофункциональных инструментов (наконечников).
4) организации кабинета, для предоставления инновационных услуг в медицинской сфере.
В отличие от дальних и близких аналогов, все манипуляции реализуются автоматизировано и автоматически, с помощью роботизированных механизмов и манипуляторов кресла, с программным управлением (ЧПУ), работающих на электрических и электро-гидравлических приводах.
Кресло характеризуется тем, что имеет:
1. Сиденье с массажными элементами (для классического механического массажа бедер (по задней поверхности), ягодиц). Причем для данного массажа используются массажные элементы существующего типа.
2. Спинку с массажными элементами (для классического механического массажа крестца, поясницы, спины), причем спинка с сиденьем соединены подвижно. Причем для данного массажа используются массажные элементы существующего типа.
3. Подголовник, со спинкой соединен подвижно.
4. Подлокотники, со спинкой соединены подвижно.
5. Держатель голени и ступни (воедино), прикреплены подвижно к частям сиденья. В зависимости от размеров бедра и голени пациента, размеры держателя увеличиваются или уменьшаются. Фигура 1 элемент 5, Фигура 3, вид Г)
6. Основание с опорами для неподвижного фиксирования кресла в рабочем состоянии, и с колесиками для транспортировки, способом перекачивания. (Фигура 1 элементы: 6,6.1,6.2.) Для состояния кресла (для качения) колесики выдвигаются ниже уровня опорных ножек, для состояния кресла «неподвижно, устойчиво, для работы» колесики утапливаются в корпус основания.
7. для манипуляций с полыми органами, и зоной промежности, используются наконечники, разных конфигураций, и разным функциональным наполнением, для разных целей
Кресло и программное обеспечение отличаются тем что:
1. Все перечисленные элементы кресла соединены друг с другом подвижно, принцип подвижного сочленения элементов кресла соответствует био-механике и антропометрии движения частей человеческого тела. Все движения в кресле производятся автоматизировано и/или автоматически, и подчиненны программному обеспечению кресла.
1.1. Причем возможно движение элементов кресла не только относительно друг друга, но и всего «собственно кресла», относительно основания (относительно горизонтали) (фиг 2А, Б), данное движение реализовано посредством «полукруглой направляющей» (фиг 1 и др. элемент 7). Указанная полукруглая направляющая является соединяющим подвижным элементом, между основанием с упорами, и собственно креслом, со всей роботизированной начинкой, она же роботизированная система (она же «РС»).
1.2. Причем посредством регулирования элементов кресла, положению тела пациента можно придать полу лежачее (для механического массажа бедер, ягодиц, крестца, поясницы, спины), или полу сидячее положение (для массажа, в том числе внутриполостного) (фиг 2А, Б).
2 Спинка кресла, в которую встроены массажные механизмы для проведения механического массажа, для крестца, поясницы, спины. К спинке подвижно прикреплены подлокотники, и подголовник. Причем по одному из вариантов реализации кресла, в спинку кресла может быть встроен компьютерный блок (далее ПК), с установленной ПО, для управления креслом.
3. Сиденье, в которое встроены массажные механизмы для проведения механического массажа, для бедер (сзади) и для ягодиц.
3.1. Сиденье состоит из двух «частей» (Фигура 3, элемнты 1.1., 1.2.), «левая часть» предназначена быть опорой для левого бедра с ягодицей, «правая часть» предназначена быть опорой для правого бедра с ягодицей. Части сиденья абсолютно одинаковы, по форме зеркально-отражены.
3.2. Со стороны спинки части сиденья соприкасаются (но не соединены), спереди части сиденья разведены, в промежутке, между краями частей сиденья, размещается «блок дополнительного манипуляционного роботизированного механизма» (далее блок 3, элемент 10.3 рисунков). На уровне промежности, части сиденья, посредством выемки, образуют отверстие (далее «паховое отверстие сиденья») Рис 3А. Через это отверстие производится работа манипуляторов блоков роботизированных механизмов (ранее и далее «блок»). Причем у боковых краев пахового отверстия размещены ролики (для сдвигания мягких тканей промежности, от пахового отверстия), вращательные движение которых подчинены ПО, (фиг 3, элемнт 1.3.). При отсутствии потребности в роликах, они утоплены в сиденье.
3.3. Части сиденья могут двигаться как в угловых направлениях, соответственно биомеханике и антропометрии движения бедер в тазобедренных суставах, способствуя разведению или сведению бедер (фиг 3.Б), так и двигаться прямолинейно (поступательно), вдоль перпендикуляра к продольной оси кресла, отдаляясь друг от друга, или приближаясь друг к другу (Фиг. 3.В). Причем держатели ступни (фиг 3, эл 5.1. и 5.2.) фиксированы каждый к своей части сиденья, поэтому вместе с раздвижением частей сиденья, раздвигаются и держатели голени и ступни (фиг 3, эл 5.1.Б. и 5.2.Б.).
3.4. При необходимости, в ситуациях, когда пациент имеет маленькие антропометрические параметры (размеры), край сиденья ближний к спинке, может перемещаться под спинку, с целью приближения пахового отверстия сиденья к спинке кресла.
3.5. Так как части сиденья подвижны (относительно друг друга и относительно оси кресла), сиденье соединено с остальными элементами кресла через «раму сиденья». Движения частей сиденья, относительно друг друга (относительно рамы) и относительно основания автоматизированы и подчинены ПО кресла.
3.6. Спереди, к частям сиденья прикреплены держатели ступни и голени (ранее и далее «держатели ступни» (фиг 3, эл 5.1., 5.2.). Держатели ступни прикреплены к сиденью жестко, но с возможностью регулирования. В зависимости от длинны бедра и голени, соответствующие элементы держателя ступни можно удлинять или укорачивать, (фиг 3Г эл А1., А2.)
4. Основание кресла (фиг 1А, эл 6), имеет раму основания, причем к раме основания подвижно прикреплены полукруглая направляющая (элемент 7) и (по одному из вариантов реализации) ПК, причем к полукруглой направляющей подвижно прикреплены рама сиденья, рама РС и спинка (элемент 2), причем к раме сиденья подвижно прикреплены части сиденья (элементы 1.1. и 1.2.), причем к раме РС подвижно прикреплена продольная направляющая блоков (ПНБ элемент 12) и (по одному из вариантов реализации) блок 3 (элемент 10.3), причем к частям сиденья подвижно прикреплены держатели ступней (элемент 5.1. и 5.2.), причем к спинке подвижно прикреплены подлокотники (элемент 4), подголовник (элемент 3) и (по одному из вариантов реализации) держатель пульта управления пациента ПУ (элемент 8), причем к правому подлокотнику (по другому варианту реализации) подвижно прикреплен держатель пульта управления пациента ПУ, причем к ПНБ подвижно прикреплены блоки 1 и 2 (10.1. и 10.2.) элементы, и картридж наконечников (фигура 1А, элемент 6.6.).
4.1. Основание кресла, с боков, спереди и сзади, закрыто щитами, причем с боков закрыто наглухо (эл 6.3.), причем спереди, и сзади, основание закрыто щитовыми элементами внутреннего автоматизировано-роботизированного оборудования кресла (оно же «роботизированная система», оно же и далее «РС», эл 9). Передний щитовой элемент РС (эл 6.4.) и задний щитовой элемент РС (эл 6.5.), перемещается вместе с РС.
4.2. При необходимости, задний щитовой элемент РС, выдвигается вместе с картриджем наконечников (эл 6.6.). Причем если сиденье кресла ориентировано не горизонтально, возможность выдвигания картриджа заблокирована.
5 Роботизированная система (РС), вмонтирована внутрь основания. По одному из вариантов реализации в основание вмонтирован и ПК, с установленным на него ПО кресла, для управления креслом. В состав РС входят:
5.1. Рама, на которой подвижно крепятся все остальные элементы РС (далее «рама РС»), причем рама РС относительно неподвижно монтирована с рамой сиденья (через полукруглую направляющую).
5.2. Продольная направляющая блоков (ранее и далее «ПНБ», фиг 4 эл 12). Подобие рельсов, к которым крепятся, и по которым движутся блоки. ПНБ является общей для всех блоков. ПНБ подвижно прикреплена к раме РС. Предусмотрено автоматизированное движение ПНБ относительно рамы РС.
5.3. Два основных блока роботизированных механизмов (он же роботизированный блок, он же далее «блок» (фиг 4, эл 10.1., 10.2.)), размещены по продольной средней линии кресла, «активными сторонами» друг к другу, активной стороной блока считается та, с которой установлен «манипулятор». Причем функциональность у обоих основных блоков одинакова, причем для удобства основной блок ближний к спинке далее назван блок 1 (эл 10.1), (для манипуляций с прямой кишкой, анусом и прианальной областью). Основной блок дальний от спинки далее назван блок 2 (эл 10.2). (для манипуляций с влагалищем и привагинальной областью). Рис. 4А. Блоки 1 и 2 являются собственно автоматизировано-роботизированными механизмами, с помощью которого происходит манипулирование «наконечниками» с помощью которых происходят все профилактические, лечебные и диагностические процедуры заявленной группы изобретений.
5.3.1. Блоки 1 и 2, соединены с рамой РС через «продольную направляющую блоков» (она же ранее и далее «ПНБ»). Реализованы механизмы позволяющие двигаться блокам 1 и 2 в следующих направлениях:
а) вдоль ПНБ в обе стороны, (фиг 4Б, направление а-а);
б) поперек ПНБ, в обе стороны (с помощью поперечных направляющих блоков (далее ПопНБ) (фиг 4Б, направление б-б);
… в) по вертикали, вертикально, прямолинейно, поступательно вниз, или верх, с помощью вертикальных направляющих блоков (далее ВНБ) (фиг 4Б, направление в-в)
г) совершать угловые движения (наклоны) в продольно-вертикальной плоскости, (фиг 4Б, направление г-г), посредством неравномерного движения в передних и задних ВНБ.
д) совершать угловые движения (наклоны) в поперечно-вертикальной плоскости (фиг 4Б, направление д-д), посредством неравномерного движения в боковых ВНБ.
5.3.2. Блок (1 и 2) состоит из:
5.3.2.1. 1) собственно блока (автоматизировано-роботизированный механизм), который крепится подвижно к ПНБ, посредством собственных ВНБ,
5.3.2.2. 2) поперечные направляющие блока (ранее и далее ПопНБ), посредством которых происходит поперечные передвижения блока, поперечно продольной оси ПНБ, и поперечно продольной оси кресла, причем ПопНБ у каждого блока свои (фиг 4А, Б элемент 10.1.4.).
5.3.2.3 3) вертикальные направляющие блоков (ранее и далее ВНБ) (фиг 4А, Б элемент 10.1.3.), причем ВНБ у каждого блока свои и их по 4 на блок, посредством которых происходит движение блоков:
а) по вертикали, прямолинейное поступательное (когда движение по всем 4 м вертикальным направляющим происходит сторго одинаково), и
б) движения блоков угловые, в любых плоскостях, при этом движения в ПНБ не одинаковы, и рассчитаны ПО соответственно задачи, (фиг 4Б направления г-г, д-д.),
5.3.2.4. 4) манипулятор блока (далее «манипулятор») (фиг 4А, Б элемент 10.1.1.), активная, подвижная часть блока, подвижность которой обеспечивается функциональностью блока, причем на манипулятор крепится наконечник, с помощью которого проводится процедура.
Функциональностью блока, обеспечивается подвижность манипулятора в следующих направлениях:
5.3.2.4.1. движения манипулятора вдоль оси манипулятора (продольные) (фиг 3В направление А):
а) в обе стороны, вертикально верх и вертикально вниз;
б) на разное, конкретно запрограммированное расстояние;
в) с разной конкретно запрограммированной скоростью;
г) с разным конкретно запрограммированным усилием.
5. 3.2.4.2. движение манипулятора вращательные, вокруг оси манипулятора (фиг 3В направление Б):
а) в обе стороны, как по часовой стрелке, так и против часовой стрелки;
б) с разной конкретно запрограммированной скоростью;
в) с разным конкретно запрограммированным усилием.
5.3.2.4.3. вибрационные движения манипулятора (фиг 3В направление В): - а) разного направления; - б) разной амплитуды; - в) разной частоты
5.3.2.5. К свободному, верхнему концу манипулятора, он же рабочий конец манипулятора (далее «РКМ»), в автоматизированном (роботизированном) режиме присоединяется наконечник, с помощью которого производятся все лечебные, и иные манипуляции. РКМ имеет механизм для неподвижной фиксации наконечника на себе, таким образом, все движения, которые блоком передаются манипулятору, в точности передаются наконечнику. Все (разные) готовые к использованию наконечники установлены в картридже наконечников, причем роботизированная система согласно программе самостоятельно может выбирать нужный наконечник, присоединять его для манипуляций, менять его на другой, для других манипуляций.
5.4. Один дополнительный манипулятор (дополнительный блок), по строению и функциональности принципиально отличается от двух основных блоков (на много менее функционален), далее назван блок 3 (фиг 4А, элемент 10.3., фиг 5) (для специальных манипуляций с превагинальной областью)
5.4.1. блок 3, по одному из вариантов реализации, соединен с НБ подвижно (фиг 4А), реализованы механизмы позволяющие двигаться блоку 3 как вдоль НБ, поперек ее, и от нее (верх, вниз) Движение (перемещение) блока 3 относительно НБ автоматизировано и подчинено ПО. По другому варианту реализации, блок 3 соединен подвижно с рамой сиденья, и также имеет возможность двигаться во всех направлениях.
5.4.2. На проекции с верху, блок 3 расположен между передними, внутренними краями частей сиденья (фиг 1, 3 элемент 10.3)..
5.4.3. Блок 3 имеет собственный набор наконечников для манипуляций (фиг 5). Выделяется один непарный сдвоенный наконечник, и два парных наконечника, все они имеют дубликаты разных размеров, для пациентов разных конституций. Данные наконечники встроены в роботизированную систему блока 3, через манипуляторы блока, причем могут работать одновременно, причем наконечники не отделимы функционально в процессе работы оборудования, но отделимы вручную с целью гигиенической обработки (дезинфекция, стерилизация), смена наконечников для блока 3 происходит вручную.
5.5. Картридж для наконечников (для блоков 1, 2) монтирован внутри основания, являются неотъемлемой частью роботизированной системы, прикреплен подвижно к раме РС. Наконечники установлены в гнезда картриджа, причем блоки самостоятельно присоединяют (захватывают) необходимый наконечники и используют его в процедуре, и самостоятельно возвращают их на место (в гнездо). В процессе одной процедуры может быть использовано любое количество наконечников, в зависимости от программы процедуры.
5.5.1. Задняя стенка основания является частью картриджа. В положении когда сиденье находится в горизонтальной или в близком к горизонтальной ориентации, задняя стенка, вместе с картриджем откатывается назад (фиг 1А, элемент 6.6), открывая гнезда картриджа, в этом положении оператор может вставить в картридж наконечники, или вытащить из картриджа наконечники, причем в этом положении, манипуляции с картриджем оператором могут проводиться даже в процессе процедуры, но в момент когда РС не пользуется картриджем. В процессе, когда картридж выкатывается из полости основания, или закатывается в полость основания, картридж катится по раме РС.
5.5.2. Катридж, посредством ПО автоматически определяет в каком именно гнезде находится наконечник, какой именно конфигурации и какого именно назначения, и в какой ориентации он вложен в гнездо. В момент включения программы, система анализирует наличие необходимых для процедуры наконечников, и если каких-то наконечников не хватает, программа сообщает оператору, перед началом процедуры.
5.5.3. Причем составной частью механизма картриджа является система (механизм) смазывания наконечников, причем вещества для смазывания имеются в ассортименте (тоже, своего рода, «картридж веществ для смазывания»), причем процесс смазывания происходит автоматизировано и/или автоматически, и запланирован программой, причем вещества для смазывания могут быть как нейтральными, так и лекарственными.
5.6. Наконечники, набор наконечников. Наконечники это та часть системы (заявленной группы изобретений) которая непосредственно контактирует с телом пациента. Именно посредством наконечников кресло (манипуляторы блоков роботизированной системы) производит контактные процедуры. Такие как: массажные процедуры, различные физио-процедуры, для профилактики и для лечения и для стимуляции, для введения лекарственных средств в полости, диагностические процедуры.
Наконечники отличаются по следующим параметрам:
5.6.1. По размерам, в зависимости от конституционных особенностей тела (органов) пациента. От меньших размеров, к большим размерам.
5.6.2. по назначению к органу: а) для манипуляций с прямой кишкой; б) для манипуляций с анусом; в) для манипуляций с влагалищем; г) для манипуляций с превагинальной областью
5.6.2.1. В зависимости от целей (объекта и особенностей воздействия), в большинстве случаев, наконечники (по назначению) могут взаимо-заменяться, (например наконечник, предназначенный для каких-то манипуляций с влагалищем, может выполнять какие-то манипуляции с прямой кишкой, и наоборот).
5.6.2.2. В зависимости от целей, один наконечник может выполнять одновременно несколько задач по разным органам. Например, наконечник, предназначенный для каких-то манипуляций с влагалищем, может выполнять какие-то манипуляции с прямой кишкой и какие-то манипуляции с анусом, и какие-то манипуляции с превагинальной областью. (Здесь не имеется в виду в рамках одной процедуры, без промежуточной дезинфекции).
5.6.2.3. В программировании процедуры обязательно выполняются все принципы и правила гигиены и дезинфекции (например, в рамках одной процедуры, наконечник, использованный в манипуляциях с прямой кишкой или анусом не используется для манипуляций с влагалищем или привагинальной областью) и для ПО программирование процедур
5.6.3. В зависимости от природы физиотерапевтического или иного воздействия:
а) для массажных воздействий (типа поглаживание, растирание, разминание), причем в зависимости от места приложения массажа наконечники различаются формой (например для массажа шейки матки и для массажа предстательной железы используются наконечники разных форм); б) вибрационное: наконечники внутрь которых встроены вибрационные механизмы; в) для температурных воздействий, в частности гипертермических воздействий (нагревание), и охлаждение (термические апликации), термоконтрастный массаж; г) оптическое излучение (световое), в том числе лазерная терапия; д) звуковое, вибро-акустическое, фонофорез; е) магнитное поле (постоянное, переменное), импульсное бегущее магнитное поле, КВЧ-терапия, управляемое магнитное поле; ж) узи, устройства для ультразвуковой терапии; и) электростимуляция, в том числе в рамках электрофареза; (электроды с импульсными токами низкой частоты); СКЭНАР-терапии, электромассажа тканей, применение биотоков заданного уровня; токами низкой частоты под контролем ультразвукового доплерографического датчика; к) вакуум-терапия, механизмы и приспособления для создания вакуума; л) И иные физиотерапевтические воздействия.
5.6.4. доставка лекарственных средств (в том числе одновременно и совместно с другими видами воздействия
а) наконечники с встроенными капсулами, с конкретными лекарственными веществами, для введения лекарственного вещества на слизистую, причем наконечник имеет также функцию массажа, поэтому процесс масса жирования тканей, и выкладывание на ткань лекарственного вещества может быть одновременным.
б) наконечники с встроенными капсулами, с конкретными лекарственными веществами, для введения лекарственного вещества в ткани инъекционно, причем наконечник имеет также функцию массажа, поэтому процесс масса жирования тканей, и инъекция лекарства в ткань может происходить поочередно, одним наконечником, причем данная процедура контролируется эндоскопическим механизмом наконечника.
в) наконечники для проведения процедуры фонофореза, причем наконечник имеет возможность и выкладывания на поверхность органа лекарственного вещества, и встроенный генератор виброаккустический.
г) наконечники для проведения процедуры электрофореза, причем наконечник имеет возможность и выкладывания на поверхность органа лекарственного вещества, и встроенный электрод для импульсных токов.
5.6.5. Наконечники для аппликаций, орошений. Данные наконечники имеют систему трубок для подвода и отвода жидкостей.
5.6.6. Наконечники для тренировки мышц влагалища (тазового дна, ануса). Данные наконечники имеют резиновые груши разной конфигурации и разного расположения, а также имеют систему накачивания воздуха в груши, а также имеют датчики, регистрирующие давления в грушах.
5.6.7. Наконечники для диагностических целей: а) наличие датчика для снятия показателей температуры, причем температуру можно фиксировать с любой конкретной точки полости; б) наличие датчика узи (ультразвуковое исследование); в) наличие в наконечнике эндоскопического оборудования, гинекологическая эндоскопия (для обследования полости вагины), ректоскопия (для обследования прямой кишки). Наличие возможности производить фото и видеозапись эндоскопической процедуры; г) наличие в наконечнике элементов для взятия материала для анализов (слизь, соскоб, биопсия)
5.6.8. Наконечники для сексуального стимулирования (возбуждения), причем для данных целей могут быть изготовлены специальные наконечники, специальной формы и специальной функциональной оснастки, причем для данных целей могут быть использованы наконечники других групп.
5.6.9. Наконечники ранее перечисленных групп, по функциональным способностям, могут делиться на группы: «пассивные» и «активные», а также «простые» и «сложные».
5.6.9.1. «пассивные» наконечники имеют неизменную геометрию, относительно постоянны в форме, могут быть относительно гибкими и относительно эластичными в зависимости от материала и целей. Но все движения, которые производят наконечники, они производят благодаря движению манипулятора (блока), с которым они соединены. Пассивные наконечники в свою очередь делятся на «простые» и «сложные»:
а). «пассивный простой наконечник» (фиг 6А), кроме функции механического воздействия собственной геометрии (тела) не имеет, друг от друга данные наконечники отличаются только размерами, формой (геометрией), и выраженностью гибкости (эластичности). Данные наконечники не являются проводниками каких либо иных функций
б). «пассивный сложный наконечник» (фиг 6Б), кроме функции механического воздействия собственной геометрии (тела), наконечник имеет и другие функции, например: встроенный вибрационный блок; датчик термометра; элементы светового и лазерного излучения; элементы виброакустического излучения, источник магнитных полей, источник УЗИ, источник-электрод электростимуляции, и т.д. кроме того, такие наконечники могут иметь приспособления (элементы) для ввода веществ (в том числе лекарственных), систему трубок для подвода и отвода жидкостей.
5.6.9.2. «активные наконечники» имеют возможность, по заданной программе, менять собственную геометрию, изменять объем, наклоняться, изгибаться. Процесс изменения геометрии наконечника полностью автоматизирован, и подчинен ПО. Активные наконечники в свою очередь тоже делятся на простые и сложные.
а). «активный простой наконечник» (фиг 6В) в отличии от пассивного наконечника имеет возможность автоматизировано менять свою геометрию (форму) запрограммированным способом. То есть наконечник движется не только благодаря манипулятору блока, к которому он прикреплен, но и благодаря способности самого наконечника менять свою форму. Например могу увеличиваться в размерах какие-то части наконечника, или наконечник в целом, или наконечник может изгибаться, в разном месте, и под разным углом, но все движения наконечника происходят четко запланированным (программой) образом. Программа отслеживает не только как сильно и в каком месте изогнут наконечник, но и как ориентирован наконечник в пространстве, и какая нагрузка напряжения (надавливания) приложена. Но кроме функции механического воздействия собственной (изменяющейся) геометрией (тела) не имеет, Данные наконечники не являются проводниками каких либо иных функций.
б). «активный сложный наконечник» (фиг 6Г), кроме функции механического воздействия собственной (изменяющейся) геометрией (тела), наконечник имеет и другие функции, например: встроенный вибрационный блок; датчик термометра; элементы светового и лазерного излучения; элементы вибро-акустического излучения; источник магнитных полей; источник УЗИ; источник-электрод электростимуляции; эндоскопические приспособления; приспособления для доставки к тканям лекарственных средств, как наружного применения, так и инъекционного; приспособления для диагностики УЗИ; приспособления для взятия материала на анализы и т.д. Кроме того, такие наконечники могут иметь приспособления (элементы) систему трубок для подвода и отвода жидкостей.
5.6.10 Место соединения наконечника с манипулятором по размеру и по принципу фиксации, одинаково для всех наконечников, ибо у блока один манипулятор, который работает со всеми наконечниками. Но у активных и сложных наконечников дополнительно реализуется система передачи функция, посредством электричества, воздуха, жидкостей, активных веществ.
6. Компьютер кресла, (он же ранее и далее ПК) представляет собой системный блок компьютера, с техническими характеристиками, необходимыми для обслуживания программного обеспечения (ранее и далее ПО) автоматизированной, роботизированной системы кресла. По одному из вариантов реализации ПК может монтироваться внутри основания и быть частью РС, по другому варианту реализации, ПК может монтироваться внутри спинки, причем ПК имеет стандартную гарнитуру а также имеет: а) соединение с блоком управления механикой робота (механикой РМ) и всеми остальными элементами движения в кресле, причем движения абсолютно всех элементов в кресле подчинены ПО кресла, б) Wi-Fi приемник, и гнездо для сетевого (интернет) кабеля; в) СД - привод и ЮСБ порты; г) соединение (кабельное) с ПУ-пациента, причем на ПУ-пациента есть также ЮСБ порт для ПК, гнездо для наушников, причем ПУ-пациента кроме проекции интерфейса ПО, может выполнять функцию монитора для ПК.
7. Панель управления, она же терминал управления, она же ранее и далее «ПУ», представлены панелью управления клиента (ПУ-клиента), которая крепится на кресле, и панелью управления врача-оператора (ПУ-врача), причем панель управления врача может располагаться как рядом с креслом, так и удаленно.
7.1. ПУ-клиента представляет собой блок с ЖК монитором с функцией тактильного отклика. Также (по одному из вариантов реализации) в лицевую часть корпуса блока, с боков и сверху вмонтированы механические кнопки, а снизу вмонтированы гнезда для механических вращательных ручек регуляторов, причем при ненадобности вращательные ручки могут сниматься. На панели управления клиента отображается программа в части клиентский интерфейс, он же интерфейс пациента, (далее ИП). С помощью манипуляций с программой (через ИП, использую кнопки и регуляторы), пациент, в случае необходимости или желания, участвует в программировании работы кресла. Как вариант, ПУ-клиента крепится к правому подлокотнику или к спинке справа, на подвижную штангу, с шарнирным сочленением. На ПУ-клиента есть гнезда для дополнительного оборудования: USB; для наушников, для датчика пульса; для параметров аппарата измерения давления; для принятия параметров ЭЭГ (от оборудования ЭЭГ); при необходимости есть возможность добавить любое количество гнезд, для иных технологий диагностики. Причем какое-то «дополнительное» оборудование может подключаться как через ПУ-пациента, так и через ПУ-врача.
Через ПУ клиента пациент может просматривать графическое отображение течения процедуры, а также просматривать любое видео, а также прослушивать музыку.
7.2. Панель управления врача (ПУ врача), и того врача который находится в одном кабинете с креслом, и того врача который находится удаленно, представляет собой классический персональный компьютер (в классической комплектации). На данный компьютер установлена программа панели управления врача, в части интерфейс врача, (далее ИВ). Причем интерфейс управления врача более функционален чем интерфейс управления пациента. Таким образом, врач работает с ПУ используя классические клавиатуру и мышку.
Причем система, программа и интерфейс управления врача находящегося рядом с креслом, ни чем не отличается от таковой, врача находящегося удаленно, отлично лишь тем, что компьютер удаленного врача соединен с креслом через интернет, а компьютер врача находящегося в кабинете соединен с креслом локально, проводом.
7.3. Панелью управления техподдержки, может служить любая панель управления, на которой загружается интерфейс тех-поддержки. С помощью интерфейсам техподдержки происходит установка программы, настройка программы, отцентровка программы, прописывание элементарных программных процедур.
7.4. Для определенных низко функциональных целей, ПУ-врача и техподдержки, в части интерфейс врача (ИВ) и техподдержки, может быть установлен на мобильный гаджет типа планшет или смартфон. Для этого разработаны специальные интерфейсы.
7.5. при определенных обстоятельствах планируется использовать интерфейсы (любых уровней доступа) в браузером варианте, при этом функции панели управления может выполнять любой компьютер подключенный к интернету.
8. Программное обеспечение кресла (ПО): Работа всех механизмов кресла подчинено программному обеспечению кресла.
8.1. Можно выделить 3 уровня технологии программирования кресла
8.1.1. Программирование техническое (техподдержки), элементами которого задаются (прописываются) параметры основных элементарных команд, на уровне основных элементарных движений.
8.1.1.1. Примеры элементарных действий (манипуляций):
- какую последовательность движений должно произвести оборудование чтобы захватить определенный наконечник из определенного места (гнезда картриджа), или чтобы вернуть наконечник в определенное гнездо картриджа, или
- какую последовательность вычислений должна произвести программа, чтобы рассчитать параметры движений, согласно заданным антропометрическим параметрам пациента (согласно «геометрической составляющей тела» пункт 8.1.1.4., и «геометрической составляющей наконечников» пункт 8.1.1.5.), или. Наконечник какого типа и какого размер, должен захватить манипулятор, принимая во внимание особенности процедуры и особенности антропометрии
- какую последовательность движений, и настроек, необходимо реализовать оборудованию, чтобы реализовать точно рассчитанную нагрузку (усилие), массажным элементом (наконечником) на тело пациента, при задании определенных параметров выраженности нагрузки
- какую последовательность движений, и настроек, необходимо реализовать оборудованию, чтобы произвести: (поглаживание), или (растирание), или (разминание), или (вибрация), с учетом размеров наконечника («геометрической составляющей наконечников» пункт 8.1.1.5), а также с расчета местонахождения участка, и ориентации поверхности в пространстве (согласно «геометрической составляющей тела» пункт 8.1.1.4.).
- какие параметры и ограничения в движениях и в настройках необходимо заложить в программе, чтобы, в случае неадекватного программирования процедуры (по ошибке или злому умыслу) гарантировать отсутствие вреда, т.е. при каких параметрах системы (предполагающих возможность вреда пациенту) система перестает работать (блокируется), предварительно предупреждая об ошибке
8.1.1.2. Для программирования процесса движения (в части работы блоков, манипуляторов, наконечников) используются понятие: «общая координатная сетка», для упорядочивания движения наконечников (манипуляторов) в пространстве, к которой привязано движение всех элементов кресла, в пространстве. Координатная сетка привязывается к раме сиденья, и отцентровывается после регулировки частей сиденья. После отцентровки фиксируется положение продольной направляющей. В момент процедуры, за исключением этапов смены наконечников, продольная направляющая неподвижно связана с сиденьем.
8.1.1.3. Уровни свободы движения манипуляторов (наконечников) относительно координатной сетки:
A) «первый уровень свободы движения» это прямолинейное движение блоков (1, 2) относительно (вдоль) продольной направляющей (горизонтально, вдоль средней линии кресла) (фигура 4 элемент 12), (фигура 4Б, направление а-а);
Б) «второй уровень свободы движения» это движение блоков в поперечных направляющих, движение прямолинейное, горизонтальное, поперек продольной направляющей (фигура 4 элемент 10.1.4.), (фигура 4Б, направление б-б);
B) «третий уровень свободы движения» это движение блоков в вертикальных направляющих, или вертикально (верх низ). (фигура 4 элемент 10.1.3.), (фигура 4Б, направление в-в) С помощью этих же механизмов реализуется угловое движение блоков, наклоны.
Г) «четвертый уровень свободы движения» угловое движение блоков, реализуется с помощью вертикальных направляющих, (фигура 4Б, направление г-г, и д-д)
Д) «пятый уровень свободы движения» это варианты движений манипулятора в блоке, (фигура 4В, направления: А, Б и В)
Е) «шестой уровень свободы движения» это варианты движений самого наконечника, но это относится только к «активным» наконечникам.
При расчете манипуляций процедуры, принимаются во внимание взаимодействие всех уровней свободы движения элементов.
8.1.1.4. Кроме общей системы координат и возможностей в движении элементов в систему вводится «геометрическая составляющая тела», это координатная пространственная модель определяющая (задающая) контактную поверхность тела пациента. Данный параметр корректируется общими анатомическими особенностями полостей и поверхностей тела и индивидуальными антропометрическими данными пациента на основании результатами первичного осмотра врача, на предмет выявления патологии (отклонений) в строении.
8.1.1.5. Кроме прочего в систему загружается «геометрическая составляющая наконечников» это размерные особенности (границы) наконечников (координаты размеров и объемов наконечников), как в активном, та и в пассивном состоянии. В случае если используется не симметричный или активный, или сложный наконечник, в процессе вращения наконечника, программа «понимает» как ориентирован наконечник в пространстве.
8.1.2. Программирование уровня врача. Имея в арсенале (в своем роде конструкторе) уже готовый набор элементарных движений (манипуляций), врач составляет из них последовательность движений, для создания процедурных программ (далее ПП) (например лечебной). Причем создание программ процедур можно относительно разделить на стандартные программы процедуры (далее СПП), и индивидуальные программы процедур (далее ИПП) для конкретного пациента и конкретного случая.
8.1.2.1. стандартные программы процедуры (ранее и далее СПП), уже созданные, хранятся в каталоге (библиотека) программы. Данные стандартные (готовые) программы создаются заранее, они предназначены для стандартных (среднестатистических) пациентов, со стандартными (среднестатистическими) клиническими случаями, без анатомических патологий и отклонений.
8.1.2.1.1. Как самый простой вариант стандартная программа может использоваться без дополнительных изменений, это самый упрощенный, ускоренный, вариант подготовки к процедуре.
8.1.2.1.2 В случае если врач считает целесообразным немного изменить процедуру (например по продолжительности, или по выраженности усилия), он может это сделать, добавив изменения в стандартную программу. Программа, в которую были внесены изменения под конкретного пациента, перестает быть стандартной, и становится индивидуальной. Она хранится в базе для использования конкретным пациентом.
8.1.2.1.3 Процесс индивидуального подбора врачом параметров процедуры, может происходить в момент нахождения пациента на кресле, путем опробывания (подбора) параметров процедур, с откликом пациента (своего рода «на живую»). Врач включает элемент процедуры, а пациент рассказывает об ощущениях, с целью, чтобы используя данную обратную связь (отклик) откорректировать (подобрать) процедуру до максимально качественного состояния. Эта технология используется не только для того чтобы откорректировать (видоизменить) существующую стандартную программу, но и для того чтобы написать индивидуальную программу с нуля.
8.1.2.1.4 В случае если, по мнению врача, даже с введенными изменениями, программа может быть использована для других пациентов, врач сохраняет ее, в общей библиотеке, в статусе (предложение нового к рекомендации) с подробным описанием ее особенностей, причин и целей внесения изменений, и с рекомендациями по ее использованию. Существует орган (совет) из специалистов в этой области, которые «модерируют» подобные предложения, и принимают решение об рекомендации данной программы к использованию как стандартной, или продолжать считать эту программу индивидуальной. В зависимости от решения, программа меняет статус на (стандартная, рекомендованная к применению в стандартных случаях) или (индивидуальная, к использованию для конкретного пациента).
8.1.2.1.5. Но даже если программа осталась со статусом (индивидуальная), она храниться в облаке с возможностью доступа к ней других врачей. Так как данная программа и причины внесения в нее изменений подробно описаны, другие врачи имеют возможность знать о ее существовании, и понимать ее особенности. Существует вероятность, что у какого-то другого врача появится похожий пациент с похожей клиникой и похожими особенностями, в этом случае врач может использовать эту программу (меняя или не меняя ее) для своего пациента.
8.1.2.2. Индивидуальные программы процедур (ранее и далее ИПП) для конкретного нестандартного пациента и конкретного нестандартного клинического случая. В случае если у врача пациент не стандартный, с изначально известными и выявленными особенностями, отклонениям, например в анатомическом строении органов, или нахождении на слизистой зоны, которую запрещено обрабатывать, и в каталоге программ в статусе (индивидуальные) программ для таких случаев не найдено, врач изначально, для данного пациента, разрабатывает (программирует) конкретную лечебную процедуру. Разработав, использовав, и убедившись в полезности процедуры по данной программе, врач выставляет данную программу в облако, «рекомендовано для особого случая». Таким образом, частью работы специалистов работающих с данным оборудованием (креслом), будет периодическое ознакомление с предложениями коллег, работающих в данной области.
Подбор вариантов элементов процедуры для курса, может происходить (образно говоря «на живую») когда пациент на кресле, а врач в ручном (автоматизированном) режима, через ПУ врача, проводит манипуляции, пациент рассказывает об ощущениях и предпочтениях, и врач на основании этого выстраивает (корректирует) программу процедуры. После построения программы, ее используют уже в автоматическим режиме.
8.1.3. Программирование уровня пациента. Для лечебной процедуры, как правило, используется стандартная программа. Но при и определенных обстоятельствах, а также при процедурах с целью профилактики, используя ПУ-пациента, пациенту может быть дана свобода (воля), собственноручно, видоизменять параметры процедуры, принимая во внимание свои субъективные и объективные ощущения от процедуры (своего рода отклик, обратная связь). Например, принимая во внимание индивидуальный порог болевой чувствительности, пациент может увеличивать или уменьшать усилия на каких-то этапах процедуры, какие-то элементы процедур увеличивать или уменьшать по продолжительности. Это может происходить под контролем врача, через ПУ врача. Так как врач через свою панель управления может видеть все нюансы процесса в мелочах. При необходимости контролировать, поправлять, изменять, или запрещать. Врач в это время может находиться удаленно.
8.1.3.1. Не исключена возможность создания программы процедуры пациентом с нуля. Это решается врачам в зависимости от особенностей клинического случая, и от адекватности пациента.
После создания пациентом программы процедуры, врач проверяет адекватность составления процедуры, и если не находит противопоказаний, сохраняет данную процедуру для (индивидуальную) для данного пациента.
В случае если врач посчитает придуманную пациентом процедуру полезной, и имеющей право на использование другими, он предлагает данную процедуру к использованию. Комиссия решающее данные вопросы, принимая мнение других врачей решаю о целесообразности использования этой программы, и в случае положительного решения, присваивают программе статус (рекомендовано к использованию как стандартная).
8.1.3.2. Особо актуален данный способ программирования в части сексуальной стимуляции половых органов, с целью достижения сексуально-эротического возбуждения., в том числе для решения проблем в области сексологии, психологического и психо-сексуального характера. В этом случае, создавая программу процедуры, пациент может делиться ею с другими пациентами, при этом программа автоматически адаптируется под антропометрические параметры другого пациента.
8.1.4. Для пользования всеми стандартными программами процедур необходимо ввести параметрические данные пациента! Согласно индивидуальным параметрическим данным, программа подстраивает стандартную программу под индивидуальные размеры и индивидуальные анатомические особенности тела и органов, пациента. Без ввода индивидуальных антропометрических данных пациента, который находится на кресле, программа не будет работать. Индивидуальные параметры пациента (постоянные) вводятся единожды, хранятся в базе данных ПО, и выбираются из базы данных для проведения процедуры. Те антропометрические данные которые могут меняться, периодически, в автоматическом режиме, запрашивают у врача необходимость снять актуальные параметры антропометрических данных. Таким образом, в системе, каждый зарегистрированный пациент имеет свою электронную (своего рода амбулаторную) карту, с фиксированием антропометрических данных, описанием анамнеза и клиники, история всех процедур проведенных на кресле.
8.1.5. В основополагающие характеристики программы, на уровне технического программирования, внесены параметры, запрещающие проведение манипуляций, или реализацию параметров, могущих навредить пациенту. Программа сама отреагирует запретом действия, даже если не отреагировал врач. Даже врач (с доступом врача, терез ПУ врача) не способен отменить данные ограничения, но врач может внести предложения по пересмотру каких-то конкретных ограничений, если считает, что это будет на пользу пациенту.
8.2. Интерфейсы. Для всех уровней программирования используются свои индивидуальные интерфейсы. При появлении необходимости изменения или дополнения, интерфейсы изменяются или дополняются.
8.2.1. Интерфейс технического программирования позволяет поэтапно запрограммировать все элементарные движения, всех подвижных элементов кресла. Данная работа проводится до введения кресла в эксплуатацию.
8.2.2. интерфейс врача позволяет:
8.2.2.1. заводить (корректировать) карту пациента; вводить (корректировать) антропометрические данные пациента; включать программы процедур; писать (составлять, программировать) программы процедур; видоизменять (дорабатывать) готовые программы процедур.
8.2.2.2 контролировать зрительно (на экране ПУ врача) прохождение процедуры, контролировать пульс, артериальное давление, и другие диагностические параметры, если они подключены к системе
8.2.2.3. Интерфейс врача позволяет врачу производить процедуры не в программно-автоматическом режиме, а вручную (для процедур не предусматривающих программного автоматического исполнения), требующие обязательного собственноручного исполнения и личного контроля врачом, например диагностические процедуры типа скопии и УЗИ, процедуры по доставке лекарственных веществ инъекционным способом, электрофорез, аппликации, и т.д.
8.2.2.4. На любом этапе любой процедуры интерфейс врача позволяет общаться с пациентом голосом и визуально
8.2.2.5. отдельно разрабатывается интерфейс врача для оборудования типа «смартфон»
8.2.3. интерфейс пациента позволяет: а) Наблюдать графическую проекцию процедуры в реальном времени представляемую на мониторе ПУ пациента. Наблюдать на мониторе результаты собственных показателей: пульс, артериальное давление, температуру и т.д. б) Если включен допуск от врача: изменять параметры программы процедуры работающей в настоящий момент, в режиме реального времени; в) Если включен допуск от врача: производить манипуляции не в программно-автоматическом режиме, а вручную, собственноручно, используя специальные инструменты интерфейса, г) отдельно разрабатывается интерфейс пациента для оборудования типа «смартфон»
8.3. ПО разрабатывается с учетом возможности работать совместно с ПО другого диагностического оборудования.
… Посредством функциональных возможностей программного обеспечения, реализован механизм сохранения в запись процедуры кресла, данных таких диагностических аппаратов, как измерение пульса, АД, ЭКГ, Энцефалограмма, и т.д. Причем, такое относительно не сложное оборудование, как фиксация пульса и АД, может быть встроено в кресло, а такое относительно сложное оборудование, как ЭКГ, энцефалограмма используется как стандартное, отдельное от кресла, но имеет специальную связь с оборудованием (ПО) кресла, для записи диагностических данных в ПО кресла.
ПО кресла записывает и сохраняет все проведенные процедуры по каждому пациенту. При необходимости можно записывать данные пульса, АД.
… При необходимости, к пациенту и к ПО кресла, подключается иное диагностическое оборудование, например ЭКГ, Электроэнцефалография (ЭЭГ), причем любые диагностические данные, в процессе записи, можно «накладывать» на запись проведения процедуры. С целью определения влияния процедуры на исследуемые параметры.
Устройство кабинета и процедуры характеризуется следующим:
1. Устройство кабинета: кресло; рабочий стол врача с пультом управления врача; рабочий стол медсестры; кушетка; смотровое гинекологическое кресло; шкаф с необходимым медицинским и лекарственными материалами и средствами; шкаф с необходимым дезинфекционным и стерилизационным оборудованием, материалом и средствами; набор видео инструкций ознакомляющих пациента с процедурой и возможными ощущениями; набор видео инструкций к тренировке мышц; умывальник; душевая кабина; соединение с интернет; кабинет может находиться как в лечебном учреждении, так и отдельно; кабинет может работать круглосуточно.
2. Персонал: В идеале, наличие врача и медсестры. Медсестра имеет знания и навыки работы с креслом, в части обслуживания кресла: дезинфекционная обработка кресла и наконечников, размещение наконечников в картридже, снаряжение наконечников лекарственными веществами, снаряжение системы смазывания наконечников необходимыми веществами. Помощь пациенту занять правильное положение в кресла, фиксирование пациента ремнями, регулирование положения частей сиденья, отцентровка манипуляторов относительно тела пациента. Умение снимать антропометрические данные пациента. При отсутствии врача заполнение карты, введение в карту антропометрических данных.
Врач производит первичный осмотр, сбор анамнеза и клиники, определение противопоказаний, заведение карты пациента, выбор метода, процедур и определение из порядка, программирование процедуры, проведение процедуры.
Может присутствовать только один врач, который выполняет все функции. Для первичного приема необходим врач, но функции необходимые для первичного приема может произвести любой гинеколог любого медицинского учреждения, поэтому если пациент приходит по направлению от гинеколога, где был произведен первичный осмотр, то врач кабинета может работать удаленно. Если в очном наличии только медсестра, она должна быть способна снять необходимые антропометрические данные, для ввода в карту.
3. Примерный распорядок: 3.1. заведение электронной карты, знакомство с клиникой, сбор анамнеза; 3.2. выбор метода лечения (диагностики); 3.3. первичный осмотр, на наличие противопоказаний, сбор антропометрических данных. «Гинекологическое смотровое кресло» и кушетка находятся в том же кабинете что и «кресло»; 3.4. ввод антропометрических данных в карту пациента; 3.5. при отсутствии противопоказаний и нормальном строении тела и органов запрос в базу данных на нужную программу процедуры; 3.6. При отсутствии в базе данных нужной программы процедуры, или ненормальном строении тела и органов, составление (написание) программы процедуры. Если работа над программой требует много времени пациент отпускается на необходимое время. Если для последующих процедур необходимы клизмы и промывания, они проводятся; 3.7. при наличии программы лечебной процедуры, включение программы в процедуру, контроль поправок программы на соответствующие антропометрические данные; 3.8. система проверяются на наличие в картридже необходимых наконечников, в случае необходимости по плану процедуры, наконечники для ввода лекарственных веществ заряжаются лекарственными веществами. При необходимости, определенные наконечники определенным образом обрабатываются (снаряжаются необходимыми веществами). При необходимости система смазывания наконечников снаряжается (заряжается) необходимыми веществами; 3.9. Пациента одевают определенным образом, и садят на кресла определенным образом. Чтобы во время процедуры не происходило смещение пациента, его фиксируют к креслу специальными ремнями. Для достижения нужного уровня доступности промежности, манипулируют особым образом частями сиденья, и валиками сиденья. С помощью визуального визира оцентровывают оборудование, относительно входов в полости. 3.10 процедура начинается под контролем врача, врач голосом предупреждает о манипуляциях которые будут происходить, с целью предупреждения пациента к предстоящим ощущениям. Даже полностью автоматическая процедура при первом посещении должна происходить под контролем врача. В случае если строение тела пациента и клинический случай стандартный, и выбранная процедура стандартная и полностью автоматическая, и при первом проведении сеанса не возникло проблем в проведении процедуры, последующие процедуры курса могут производиться медсестрой без врача (на усмотрение врача, под его ответственность).
4. Возможность работы с креслом удаленно, позволяет врачу находящемуся в одном городе, работать с пациентом на кресле, находящихся в другом городе. Это особенно актуально при недостатке врачей определенной категории, или при необходжимости вмешательства в процесс других врачей.
Краткое описание чертежей
Фигура 1: Кресло вид с боку (А), спереди (Б) сверху (В) (схематично)
«Вид А», с боку
1 - сиденье; 2 - спинка; 3 - подголовник; 4 - подлокотник; 5 - держатель ступни и голени; 6 - основание; 6.1. - ножки опорной системы основания для неподвижной фиксации кресла в рабочем состоянии; 6.2. - колесики опорной системы основания, для передвижения кресла методом качения; 6.3 - (он же 6). боковые щиты основания закрывающие РС наглухо.; 7 - Полукруглая направляющая для ориентации собственно кресла в пространстве; 8. - Панель управления клиента (ПУ клиента) закреплена на правый поручень на подвижных штангах; 6.6. картридж с наконечниками в выдвинутом состоянии.
«Вид Б», спереди (с фронта)
1.1. - часть правая сиденья
1.2. - часть левая сиденья
5.1. - держатель ступни и голени правый
5.2. - держатель ступни и голени левый, оба держателя монтированны подвижно, могут изменять размеры соответственно антропометрии пациента.
6.3. - боковой щит основания, закрывающий РС наглухо
6.4. - передний щит основания, являющийся передним щитовым элементом внутреннего оборудования РС
10.3. - блок 3 (вид с фронта кресла)
«ВидВ» с верху
6.5. - задний щит основания, являющийся задним щитовым элементом внутреннего оборудования РС
10.3. - блок 3 (вид сверху)
Фигура 2 (А, Б) варианты изменения положения собственно кресла в пространстве, относительно горизонтали.
(А) в полу-лежачем положении, для механического массажа бедер, ягодиц, крестца, поясницы, спины
(Б) в полу-сидячем положении, для массажа полых органов, а также: бедер, ягодиц, крестца, поясницы, спины
Элемент 9. - корпус внутренних элементов механизмов роботизированной системы (PC). РС относительно неподвижно монтирована с рамой сиденья, поэтому при изменения положения сиденья, меняется положение РС вслед за ней. (все остальные элементы рисунка перечислены ранее).
Фигура 3 Сиденье с держателями ступни (А, Б, В, Г) схематично
Вид Асиденье не разведенное
1.1. правая часть сиденья; 1.2. левая часть сиденья; 1.3. валик сиденья (для отодвигания мягких тканей); 5.1. держатель ступни правой части сиденья; 5.2. держатель ступни левой части сиденья;
10.1. блок 1; 10.2. блок 2;
10.1.1. манипуляторы блоков 1 и 2
10.3. блок 3
10.3.1. манипулятор блока 3
Вид Б сиденье с угловым разведением частей сиденья
1.1.Б правая часть сиденья в разведенном, угловым образом, положении; 1.2.Б левая часть сиденья в разведенном, угловым образом, положении; 5.1.Б правый держатель ступни при разведенной, угловым образом, правой части сиденья; 5.2.Б левый держатель ступни при разведенной, угловым образом, левой части сиденья
Вид В сиденье с линейным разведением частей сиденья
1.1.Б правая часть сиденья в разведенном, линейным образом, положении; 1.2.Б левая часть сиденья в разведенном, линейным образом, положении; 5.1.Б правый держатель ступни при разведенной, линейным образом, правой части сиденья; 5.2.Б левый держатель ступни при разведенной, линейным образом, левой части сиденья
Вид Г: варианты и механизм перемещения держателя ступни, при разных длинах бедра и голени
1 - сиденье; 5 - держатель ступни при минимальных длинах бедра и голени (пациента). 5.1. - штанги фиксирующие держатель ступни; 5Б - положение держателя ступни, при максимальных длинах бедра и голени (пациента); А1 - движение штанги в сиденье, для регулирования по длине бедра; А2 - движение штанги в держателе, для регулирования по длине голени.
Фигура 4 Блоки 1 и 2 (Роботизированные блоки), их взаиморасположение и движения (схематично, по одному из вариантов реализации)
Вид А схематическое взаиморасположение блоков относительно продольной направляющей
10.1. блок 1 (ректальный)
10.1.1 манипулятор блока 1 и 2
10.1.2. схематичное обозначение манипуляторов блоков 1 и 2
10.1.3. вертикальные направляющие блоков 1 и 2 (ВНБ)
10.1.4. поперечные направляющие блоков 1 и 2 (ПопНБ)
10.1.5 места соединения (подвижного) вертикальных направляющих блоков (1, 2, 3) с продольной направляющей (схематично)
10.2. блок 2 (вагинальный) блоки 1 и 2 абсолютно одинаковы, их элементы идентичны
10.3. блок 3 (превагинальный, внешних половых органов женских)
10.3.1. манипулятор блока 3
10.3.2. схематичное обозначение манипулятора 3
10.3.3. вертикальные направляющие блока 3
11. элемент сиденья, в разрезе, в части примыкающей к спинке
12. продольная направляющая (ПНБ)
Вид Б: направление движения блоков 1 и 2, относительно продольной направляющей, (схематично, по одному из вариантов реализации)
а) Направление (а-а) прямолинейное движение вдоль продольной направляющей, используя продольную направляющую РС (12); б) Направление (б-б) прямолинейное движение поперек продольной направляющей, используя продольные направляющие блоков (10.1.4.); в) Направление (в-в) прямолинейное движение в вертикальном направлении, используя вертикальные направляющие блоков (10.1.3.);
г) Направление (г-г) угловое движение в плоскости А/Б, посредством неравномерного изменения длинны в передних и задних вертикальных направляющих блоков (10.1.3.); д) Направление (д-д) угловое движение в плоскости В/Б, посредством неравномерного изменения длинны в боковых вертикальных направляющих блоков (10.1.3.)
Вид В: Направление движений манипулятора блоков 1, 2, относительно самого блока.
А - прямолинейное, поступательное, возвратно-поступательное движение манипулятора (10.1.1), в вертикальном направлении относительно блока (10.1)
Б - вращательное движение манипулятора вокруг своей продольной, центральной оси, в обоих направлениях.
В - вибрационные движения манипулятора в любых направлениях.
Фигура 5: манипуляторы блока 3
вид А: вид блока со стороны манипуляторов (с активной части); Вид Б: вид с верху; Вид В - вид с боку, (схематично, по одному из вариантов реализации)
Элементы: 10.3. - блок 3;
10.3.1. не парный сдвоенный манипулятор, активные элементы: вращающиеся колесики;
10.3.2. парный манипулятор «пестики», движения взаимосвязаны, симметричны;
10.3.3. отверстие в корпусе блока 3, для свободы движения манипулятора 10.3.1.;
10.3.4. отверстия в корпусе блока 3, для свободы движения манипуляторов 10.3.2.
Фигура 6, виды наконечников для блоков 1 и 2.
Фиг 6А наконечник «пассивный простой»: тело наконечника однородное, геометрия наконечника относительно не изменяемая, может быть элемент пластичности и гибкости. Движения наконечника определяются только движением манипулятора, к которому крепится наконечник. Используется только для массажа.
Фиг 6Б наконечник «пассивный сложный»: геометрия данного наконечника не меняется, но он имеет иные встроенные функции, например доставка лекарственных веществ, физео-процедурные воздействия, диагностические функции.
Фиг 6В наконечник «активный простой»: изменяет свою геометрию (гнется, загибается), дополнительных функций не имеет. Используется для массажа труднодоступных мест полостей.
Фиг 6Г наконечник «активный сложный», является проводником дополнительных функций, и способен изменять свою форму (геометрию). Используется например: УЗИ диагностика, скопическая диагностика, инъекции, взятие материала на гистологию и пр.
Осуществление изобретения
Кресло состоит из:
- Сиденье с массажными элементами (для классического механического массажа бедер (по задней поверхности), ягодиц). Причем для данного массажа используются массажные элементы существующего типа.
- Спинку с массажными элементами (для классического механического массажа крестца, поясницы, спины), причем спинка с сиденьем соединены подвижно. Причем для данного массажа используются массажные элементы существующего типа.
- Подголовник, со спинкой соединен подвижно.
- Подлокотники, со спинкой соединены подвижно. К правому подлокотнику, подвижно, крепится ПУ пациента.
- Держатель голени и ступни (воедино), прикреплены подвижно к частям сиденья. В зависимости от размеров бедра и голени пациента, размеры держателя увеличиваются или уменьшаются. Фигура 1 элемент 5, Фигура 3, вид Г)
- Основание с опорами для неподвижного фиксирования кресла в рабочем состоянии, и с колесиками для транспортировки, способом перекачивания. (Фигура 1 элементы: 6, 6.1, 6.2.) Для состояния кресла (для качения) колесики выдвигаются ниже уровня опорных ножек, для состояния кресла «неподвижно, устойчиво, для работы» колесики утапливаются в корпус основания.
- Для манипуляций с полыми органами, и зоной промежности, используются наконечники, разных конфигураций, и разным функциональным наполнением, для разных целей
Кресло и программное обеспечение отличаются тем что:
1. Все перечисленные элементы кресла соединены друг с другом подвижно, принцип подвижного сочленения элементов кресла соответствует био-механике и антропометрии движения частей человеческого тела. Все движения в кресле производятся автоматизировано и/или автоматически, и подчиненны программному обеспечению кресла.
1.1. Причем возможно движение элементов кресла не только относительно друг друга, но и всего «собственно кресла», относительно основания (относительно горизонтали) (фиг 2А, Б), данное движение реализовано посредством «полукруглой направляющей» (фиг 1 и др. элемент 7). Указанная полукруглая направляющая является соединяющим подвижным элементом, между основанием с упорами, и собственно креслом, со всей роботизированной начинкой, она же роботизированная система (она же «РС»).
1.2. Причем посредством регулирования элементов кресла, положению тела пациента можно придать полу лежачее, или полу сидячее положение (фиг 2А, Б).
2 Спинка кресла, в которую встроены массажные механизмы для проведения механического массажа, для крестца, поясницы, спины. К спинке подвижно прикреплены подлокотники, и подголовник. Причем по одному из вариантов реализации кресла, в спинку кресла может быть встроен компьютерный блок (далее ПК), с установленной ПО, для управления креслом.
3. Сиденье, в которое встроены массажные механизмы для проведение механического массажа, для бедер (сзади) и для ягодиц.
3.1. Сиденье состоит из двух «частей» (Фигура 3, элемнты 1.1., 1.2.), «левая часть» предназначена быть опорой для левого бедра с ягодицей, «правая часть» предназначена быть опорой для правого бедра с ягодицей. Части сиденья абсолютно одинаковы, по форме зеркально-отражены.
3.2. Со стороны спинки части сиденья соприкасаются (но не соединены), спереди части сиденья разведены, в промежутке, между краями частей сиденья, размещается «блок дополнительного манипуляционного роботизированного механизма» (далее блок 3, элемент 10.3 рисунков). На уровне промежности части сиденья посредством выемки образуют отверстие (далее «паховое отверстие сиденья») Рис 3А, через которое производится работа манипуляторов блоков роботизированных механизмов (ранее и далее «блок»), причем у боковых краев пахового отверстия размещены ролики (для сдвигания мягких тканей промежности, от пахового отверстия), вращательные движение которых подчинены ПО, (фиг 3, элемент 1.3.). При отсутствии потребности в роликах, они утоплены в сиденье.
3.3. Части сиденья могут двигаться как в угловых направлениях, соответственно биомеханике и антропометрии движения бедер в тазобедренных суставах, способствуя разведению или сведению бедер (фиг 3.Б), так и двигаться прямолинейно, вдоль перпендикуляра к продольной оси кресла, отдаляясь друг от друга, или приближаясь друг к другу (Фиг. 3.В). Причем держатели ступни (фиг 3, эл 5.1. и 5.2.) привязаны жестко, каждый к своей части сиденья, поэтому вместе с раздвижением частей сиденья, раздвигаются и держатели голени и ступни (фиг 3, эл 5.1.Б. и 5.2.Б.).
3.4. При необходимости, в ситуациях, когда пациент имеет маленькие антропометрические параметры (размеры), край сиденья ближний к спинке, может перемещаться под спинку, с целью приближения пахового отверстия сиденья к спинке кресла.
3.5. Так как части сиденья подвижны (относительно друг друга и относительно оси кресла), сиденье соединено с остальными элементами кресла через «раму сиденья». Движения частей сиденья, относительно друг друга (относительно рамы) и относительно основания автоматизированы и подчинены ПО кресла.
3.6. Спереди, к частям сиденья прикреплены держатели ступни и голени (ранее и далее «держатели ступни» (фиг 3, эл 5.1., 5.2.). Держатели ступни прикреплены к сиденью жестко, но с возможностью регулирования. В зависимости от длинны бедра и голени, соответствующие элементы держателя ступни можно удлинять или укорачивать, (фиг 3Г эл А1., А2.)
4. Основание кресла (фиг 1А, эл 6), имеет раму основания, причем к раме основания подвижно прикреплены полукруглая направляющая (элемент 7) и (по одному из вариантов реализации) ПК, причем к полукруглой направляющей подвижно прикреплены рама сиденья, рама РС и спинка (элемент 2), причем к раме сиденья подвижно прикреплены части сиденья (элементы 1.1. и 1.2.), причем к раме РС подвижно прикреплена продольная направляющая блоков (ПНБ элемент 12) и (по одному из вариантов реализации) блок 3 (элемент 10.3), причем к частям сиденья подвижно прикреплены держатели ступней (элемент 5.1. и 5.2.), причем к спинке подвижно прикреплены подлокотники (элемент 4) и подголовник (элемент 3) и (по одному из вариантов реализации) держатель пульта управления пациента ПУ (элемент 8), причем к правому подлокотнику (по другому варианту реализации) подвижно прикреплен держатель пульта управления пациента ПУ, причем к ПНБ подвижно прикреплены блоки 1 и 2 (10.1. и 10.2.) элементы, и картридж наконечников (фигура 1А, элемент 6.6.).
4.1. Основание кресла, с боков, спереди и сзади, закрыто щитами, причем с боков закрыто наглухо (эл 6.3.), причем спереди, и сзади, основание закрыто щитовыми элементами внутреннего автоматизировано-роботизированного оборудования кресла (оно же «роботизированная система», оно же и далее «РС», эл 9). Передний щитовой элемент РС (эл 6.4.) и задний щитовой элемент РС (эл 6.5.), перемещается вместе с РС.
4.2. При необходимости, задний щитовой элемент РС, выдвигается вместе с картриджем наконечников (эл 6.6.). Причем если сиденье кресла ориентировано не горизонтально, возможность выдвигания картриджа заблокирована.
5 Роботизированная система (РС), вмонтирована внутрь основания. По одному из вариантов реализации в основание вмонтирован и ПК, с установленным на него ПО кресла, для управления креслом. В состав РС входят:
5.1. рама, на которой подвижно крепятся все остальные элементы РС (далее «рама РС»), причем рама РС относительно неподвижно монтирована с рамой сиденья (через полукруглую направляющую).
5.2. Продольная направляющая блоков (ранее и далее «ПНБ», фиг 4 эл 12). Подобие рельсов, к которым крепятся, и по которым движутся блоки. ПНБ является общей для всех блоков. ПНБ подвижно прикреплена к раме РС. Предусмотрено автоматизированное движение ПНБ относительно рамы РС.
5.3. Два основных блока роботизированных механизмов (он же «блок» (фиг 4, эл 10.1., 10.2.)), размещены по продольной средней линии кресла, «активными сторонами» друг к другу, активной стороной блока считается та, с которой установлен «манипулятор». Причем функциональность у обоих основных блоков одинакова, причем для удобства основной блок ближний к спинке далее назван блок 1 (эл 10.1), (для манипуляций с прямой кишкой, анусом и прианальной областью). Основной блок дальний от спинки далее назван блок 2 (эл 10.2) (для манипуляций с влагалищем и привагинальной областью). Рис. 4А. Блоки 1 и 2 являются собственно автоматизировано-роботизированными механизмами, с помощью которого происходит манипулирование «наконечниками» с помощью которых происходят все профилактические, лечебные и диагностические процедуры заявленной группы изобретений.
5.3.1. Блоки 1 и 2, соединены с рамой РС через «продольную направляющую блоков» (она же ранее и далее «ПНБ»). Реализованы механизмы позволяющие двигаться блокам 1 и 2 в следующих направлениях: а) вдоль ПНБ в обе стороны, (фиг 4Б, направление а-а); б) поперек ПНБ, в обе стороны (с помощью поперечных направляющих блоков (далее ПопНБ) (фиг 4Б, направление б-б); в) по вертикали, вертикально, прямолинейно, поступательно вниз, или верх, с помощью вертикальных направляющих блоков (далее ВНБ) (фиг 4Б, направление в-в); г) совершать угловые движения (наклоны) в продольно-вертикальной плоскости, (фиг 4Б, направление г-г), посредством неравномерного движения в передних и задних ВНБ; д) совершать угловые движения (наклоны) в поперечно-вертикальной плоскости (фиг 4Б, направление д-д), посредством неравномерного движения в боковых ВНБ.
5.3.2. Блок (1 и 2) состоит из: 1) собственно блока (автоматизировано-роботизированный механизм), который крепится подвижно к ПНБ, посредством собственных ВНБ; 2) поперечные направляющие блока (ранее и далее ПопНБ), посредством которых происходит поперечные передвижения блока, поперечно продольной оси ПНБ, и поперечно продольной оси кресла, причем ПопНБ у каждого блока свои (фиг 4А, Б элемент 10.1.4.); 3) вертикальные направляющие блоков (ранее и далее ВНБ) (фиг 4А, Б элемент 10.1.3.), причем ВНБ у каждого блока свои и их по 4 на блок, посредством которых происходит движение блоков: а) по вертикали, прямолинейное поступательное (когда движение по всем 4 м вертикальным направляющим происходит сторго одинаково), и; б) движения блоков угловые, в любых плоскостях, при этом движения в ПНБ не одинаковы, и рассчитаны ПО соответственно задачи, (фиг 4Б направления г-г, д-д.); 4) манипулятор блока (далее «манипулятор») (фиг 4А, Б элемент 10.1.1.), активная, подвижная часть блока, подвижность которой обеспечивается функциональностью блока, причем на манипулятор крепится наконечник, с помощью которого проводится процедура.
Функциональностью блока, обеспечивается подвижность манипулятора в следующих направлениях:
1) движения манипулятора вдоль оси манипулятора (продольные) (фиг 3В направление А): а) в обе стороны, вертикально верх и вертикально вниз; б) на разное, конкретно запрограммированное расстояние; в) с разной конкретно запрограммированной скоростью; г) с разным конкретно запрограммированным усилием.
2) движение манипулятора вращательные, вокруг оси манипулятора (фиг 3В направление Б): а) в обе стороны, как по часовой стрелке, так и против часовой стрелки; б) с разной конкретно запрограммированной скоростью; в) с разным конкретно запрограммированным усилием.
3) вибрационные движения манипулятора (фиг 3В направление В): а) разного направления; б) разной амплитуды; в) разной частоты
5.3.2.5. К свободному, верхнему концу манипулятора, он же рабочий конец манипулятора (далее «РКМ»), в автоматизированном (роботизированном) режиме присоединяется наконечник, с помощью которого производятся все лечебные, и иные манипуляции. РКМ имеет механизм для неподвижной фиксации наконечника на себе, поэтому, все движения, которые блоком передаются манипулятору, в точности передаются наконечнику. Все (разные) готовые к использованию наконечники установлены в картридже наконечников, причем роботизированная система согласно программе самостоятельно может выбирать нужный наконечник, присоединять его для манипуляций, менять его на другой, для других манипуляций.
5.4. Один дополнительный манипулятор (дополнительный блок), по строению и функциональности принципиально отличается от двух основных блоков (на много менее функционален), далее назван блок 3 (фиг 4А, элемент 10.3., фиг 5) (для специальных манипуляций с превагинальной областью)
5.4.1. блок 3, по одному из вариантов реализации, соединен с НБ подвижно (фиг 4А), реализованы механизмы позволяющие двигаться блоку 3 как вдоль НБ, поперек ее, и от нее (верх, вниз) Движение (перемещение) блока 3 относительно НБ автоматизировано и подчинено ПО.
По другому варианту реализации, блок 3 соединен подвижно с рамой сиденья, и также имеет возможность двигаться во всех направлениях.
5.4.2. На проекции сверху, блок 3 расположен между передними, внутренними краями частей сиденья (фиг 1, 3 элемент 10.3).
5.4.3. Блок 3 имеет собственный набор наконечников для манипуляций (фиг 5), данные наконечники встроены в роботизированную систему блока 3 через манипуляторы блока, причем наконечники не отделимы функционально в процессе работы оборудования, но отделимы вручную с целью гигиенической обработки (дезинфекция, стерилизация), смена наконечников для блока 3 происходит вручную.
5.5. Картридж для наконечников (для блоков 1, 2) монтирован внутри основания, являются неотъемлемой частью роботизированной системы, прикреплен подвижно к раме РС. Наконечники установлены в гнезда картриджа, причем блоки самостоятельно присоединяют (захватывают) необходимый наконечники и используют его в процедуре, и самостоятельно возвращают их на место (в гнездо). В процессе одной процедуры может быть использовано любое количество наконечников, в зависимости от программы процедуры.
5.5.1. Задняя стенка основания является частью картриджа. В положении когда сиденье находится в горизонтальной или в близком к горизонтальной ориентации, задняя стенка, вместе с картриджем откатывается назад (фиг 1А, элемент 6.6), открывая гнезда картриджа, в этом положении оператор может вставить в картридж наконечники, или вытащить из картриджа наконечники, причем в этом положении, манипуляции с картриджем оператором могут проводиться даже в процессе процедуры, но в момент когда РС не пользуется картриджем. В процессе, когда картридж выкатывается из полости основания, или закатывается в полость основания, картридж катится по раме РС.
5.5.2. Катридж, посредством ПО автоматически определяет в каком именно гнезде находится наконечник, какой именно конфигурации и какого именно назначения, и в какой ориентации он вложен в гнездо. В момент включения программы, система анализирует наличие необходимых для процедуры наконечников, и если каких-то наконечников не хватает, программа сообщает оператору, перед началом процедуры.
5.5.3. Причем составной частью механизма картриджа является система (механизм) смазывания наконечников, причем вещества для смазывание имеются в ассортименте (тоже, своего рода, картридж веществ для смазывания), причем процесс смазывания происходит автоматизировано и/или автоматически, и запланирован программой, причем вещества для смазывания могут быть как нейтральными так и лекарственными.
5.6. Наконечники, набор наконечников
Наконечники это та часть системы (заявленной группы изобретений) которая непосредственно контактирует с телом пациента. Именно посредством наконечников кресло (манипуляторы блоков роботизированной системы) производит контактные процедуры. Такие как: массажные процедуры, различные физио-процедуры, для профилактики и для лечения и для стимуляции, для введения лекарственных средств в полости, диагностические процедуры.
Наконечники отличаются по следующим параметрам:
1) По размерам, в зависимости от конституционных особенностей тела (органов) пациента. От меньших размеров, к большим размерам.
2) по назначению к органу: а) для манипуляций с прямой кишкой; б) для манипуляций с анусом; в) для манипуляций с вагиной; г) для манипуляций с превагинальной областью
3) В зависимости от природы физиотерапевтического или иного воздействия: а) для массажных воздействий (типа поглаживание, растирание, разминание), причем в зависимости от места приложения массажа наконечники различаются формой (например для массажа шейки матки и для массажа предстательной железы используются наконечники разных форм); б) вибрационное: наконечники внутрь которых встроены вибрационные механизмы; в) для температурных воздействий, в частности гипертермических воздействий (нагревание), и охлаждение (термические апликации), термоконтрастный массаж; г) оптическое излучение (световое), в том числе лазерная терапия; д) звуковое, вибро-акустическое, фонофорез; е) магнитное поле (постоянное, переменное), импульсное бегущее магнитное поле, КВЧ-терапия, управляемое магнитное поле; ж) узи, устройства для ультразвуковой терапии; и) электростимуляция, в том числе в рамках электрофареза; (электроды с импульсными токами низкой частоты); СКЭНАР-терапии, электромассажа тканей, применение биотоков заданного уровня; токами низкой частоты под контролем ультразвукового доплерографического датчика; к) вакуум-терапия, механизмы и приспособления для создания вакуума; л) И иные физиотерапевтические воздействия.
5.6.4. доставка лекарственных средств (в том числе одновременно и совместно с другими видами воздействия: а) наконечники с встроенными капсулами, для лекарственных веществ; б) наконечники с встроенными капсулами, с конкретными лекарственными веществами, для введения лекарственного вещества в ткани иньекционно; в) наконечники для проведения процедуры фонофореза; г) наконечники для проведения процедуры электрофореза.
5.6.5. Наконечники для апликаций, орошений
5.6.6. Наконечники для тренировки мышц вагины (тазового дна, ануса).
5.6.7. Наконечники для диагностических целей
5.6.8. Наконечники для сексуального стимулирования (возбуждения).
5.6.9. Наконечники ранее перечисленных групп, по функциональным способностям, могут делиться на группы: «пассивные» и «активные», а также «простые» и «сложные»:
1) «пассивные» наконечники имеют неизменную геометрию. Пассивные наконечники в свою очередь делятся на «простые» и «сложные»:
- а) «пассивный простой наконечник» (фиг 6А), кроме функции механического воздействия собственной геометрии (тела) не имеет. Данные наконечники не являются проводниками каких либо иных функций.
- б) «пассивный сложный наконечник» (фиг 6Б), кроме функции механического воздействия собственной геометрии (тела), наконечник имеет и другие функции, например: иные виды физиотерапевтического воздействия, диагностика, тренировка мышц, взятие анализов.
2) «активные наконечники» имеют возможность, по заданной программе, менять собственную геометрию. Активные наконечники в свою очередь тоже делятся на «простые» и «сложные»:
- а) «активный простой наконечник» (фиг 6В) имеет возможность автоматизировано менять свою геометрию (форму) запрограммированным способом.. Но кроме функции механического воздействия собственной (изменяющейся) геометрией (тела) не имеет. Данные наконечники не являются проводниками каких либо иных функций,
- б) «активный сложный наконечник» (фиг 6Г), кроме функции механического воздействия собственной (изменяющейся) геометрией (тела), наконечник имеет и другие встроенные функции, например: иные виды физиотерапевтического воздействия, диагностика, тренировка мышц, взятие анализов.
5.6.10 Место соединения наконечника с манипулятором по размеру и по принципу фиксации, одинаково для всех наконечников, ибо у блока один манипулятор, который работает со всеми наконечниками. Но у активных и сложных наконечников дополнительно реализуется система передачи функции, посредством электричества, воздуха, жидкостей, активных веществ.
6. Компьютер кресла, (он же ранее и далее ПК) представляет собой системный блок компьютера, для обслуживания ПО, автоматизированной и автоматической работы роботизированной системы кресла. ПК имеет стандартную гарнитуру а также имеет: - соединение с блоком управления механикой робота (механикой РМ) и всеми остальными элементами движения в кресле, причем движения абсолютно всех элементов в кресле подчинены ПО кресла; - фай-фай приемник, и гнездо для сетевого (интернет) кабеля; - СД - привод и ЮСБ порты; - соединение (кабельное) с ПУ-пациента, причем на ПУ-пациента есть также ЮСБ порт для ПК, гнездо для наушников, причем ПУ-пациента кроме проекции клиентского интерфейса ПО, может выполнять функцию монитора для ПК.
7. Панель управления, она же ранее и далее «ПУ», представлены панелью управления клиента (ПУ-клиента), которая крепится на кресле, и панелью управления врача-оператора (ПУ-врача), причем панель управления врача может располагаться как рядом с креслом, так и удаленно:
а) ПУ-клиента представляет собой блок с ЖК монитором с функцией тактильного отклика. Также вмонтированы механические кнопки, и гнезда для механических вращательных ручек регуляторов. ПУ клиента крепится на правом подлокотнике или на спинке с права, подвижно. Клиент работает с интерфейсом через монитор, кнопки и ручки вращения.
б) Панель управления врача (ПУврача), представляет из себя классический персональный компьютер (в классической комплектации). На данный компьютер установлена программа панели управления врача, в части интерфейс врача, (далее ИВ). Таким образом врач работает с программой (с интерфейсом врача) используя классические клавиатуру и мышку. Причем система, программа и интерфейс управления врача находящегося рядом с креслом, ни чем не отличается от таковой, врача находящегося удаленно, отлично лишь тем, что компьютер удаленного врача соединен с креслом через интернет, а компьютер врача находящегося в кабинете соединен с креслом локально, проводом.
в) Панелью управления техподдержки, может служить как ПУ клиента, так и ПУ врача, через которые подключается интерфейс техподдержки.
г) Для определенных низко-функциональных целей, ПУ-клиента, врача и техподдержки, в части интерфейс, может быть установлен на мобильный гаджет типа планшет или смартфон. Для этого разработаны специальные интерфейсы.
8. Программное обеспечение кресла (ПО). Работа всех механизмов кресла подчинено программному обеспечению кресла. Для пользования всеми стандартными программами процедур необходимо ввести параметрические данные пациента! Согласно индивидуальным параметрическим данным, программа подстраивает стандартную программу под индивидуальные размеры и индивидуальные анатомические особенности тела и органов, пациента. В основополагающие характеристики программы, на уровне технического программирования, внесены параметры, запрещающие проведение манипуляций, или реализацию параметров, могущих навредить пациенту.
8.1. Можно выделить 3 уровня технологии программирования кресла:
а). Программирование техническое (техподдержки), элементами которого задаются (прописываются) параметры основных элементарных команд, на уровне основных элементарных движений.
б). Программирование уровня врача. Имея в арсенале (в своем роде конструкторе) уже готовый набор элементарных движений (манипуляций), врач составляет из них последовательность движений, для создания процедурных программ (далее ПП) (например лечебной).
в) Программирование уровня пациента. Для лечебной процедуры, как правило, используется стандартная программа. Но при и определенных обстоятельствах, а также при процедурах с целью профилактики, используя ПУ-пациента, пациенту может быть дана свобода (воля), собственноручно, видоизменять параметры процедуры, принимая во внимание свои субъективные и объективные ощущения от процедуры (своего рода отклик, обратная связь).
8.2. Интерфейсы. Для всех уровней программирования используются свои индивидуальные интерфейсы. При появлении необходимости изменения или дополнения, интерфейсы изменяются или дополняются.
8.2.1. Интерфейс технического программирования позволяет поэтапно запрограммировать все элементарные движения, всех подвижных элементов кресла. Данная работа проводится до введения кресла в эксплуатацию.
8.2.2. интерфейс врача позволяет:
а) заводить (корректировать) карту пациента; вводить (корректировать) антропометрические данные пациента; включать программы процедур; писать (составлять, программировать) программы процедур; видоизменять (дорабатывать) готовые программы процедур;
б) контролировать зрительно (на экране ПУ врача) прохождение процедуры, контролировать пульс, артериальное давление, и другие диагностические параметры если они подключены к системе;
в) Интерфейс врача позволяет врачу производить процедуры не в программно-автоматическом режиме, а вручную (автоматизировано), требующие обязательного собственноручного исполнения и личного контроля врачом:
г) На любом этапе любой процедуры интерфейс врача позволяет общаться с пациентом голосом и визуально
8.2.3. интерфейс пациента позволяет:
а) Наблюдать графическую проекцию процедуры в реальном времени представляемую на мониторе ПУ пациента. Наблюдать на мониторе резщультаты собственных показателей, типа пильс, артериальное давление, температуру и т.д.
б) Если включен допуск от врача: изменять параметры программы процедуры работающей в настоящий момент, в режиме реального времени; производить манипуляции не в программно-автоматическом режиме, а вручную (автоматизированно), собственноручно, используя специальные инструменты интерфейса.
8.3. ПО кресла разрабатывается с учетом возможности работать совместно с другим, например диагностическим оборудованием. Что позволяет на запись проведения процедуры накладывать запись диагностических показателей.
9. Устройство кабинета и процедуры характеризуется следующим:
9.1. Устройство кабинета: Кроме стандартного набора смотрового гинекологического кабинета, в наличии заявленное кресло, компьютер как ПУ врача, соединение с интернет.
9.2. Персонал: В идеале, наличие врача и медсестры.
Медсестра имеет знания и навыки работы с креслом, в части обслуживания кресла: дезинфекционная обработка кресла и наконечников, размещение наконечников в картридже, снаряжение наконечников лекарственными веществами, снаряжение системы смазывания наконечников необходимыми веществами. Медсестра помогает пациенту занять правильное положение в кресла, фиксирование пациента ремнями, регулирование положения частей сиденья, отцентровка манипуляторов относительно тела пациента. Умение снимать антропометрические данные пациента. При отсутствии врача заполнение карты, введение в карту антропометрических данных.
Врач производит первичный осмотр, сбор анамнеза и клиники, определение противопоказаний, заведение карты пациента, выбор метода, процедур и определение из порядка, программирование процедуры, проведение процедуры.
9.3. Примерный распорядок:
9.3.1. а) заведение электронной карты, знакомство с клиникой, сбор анамнеза; б) выбор метода лечения (диагностики); в) первичный осмотр, на наличие противопоказаний, сбор антропометрических данных. «Гинекологическое смотровое кресло» и кушетка находятся в том же кабинете что и «кресло»; г) ввод антропометрических данных в карту пациента; д) при отсутствии противопоказаний и нормальном строении тела и органов запрос в базу данных на нужную программу процедуры; е) При отсутствии в базе данных нужной программы процедуры, или ненормальном строении тела и органов, составление (написание) программы процедуры. Если работа над программой требует много времени пациент отпускается на необходимое время. Если для последующих процедур необходимы клизмы и промывания, они проводятся; ж) при наличии программы лечебной процедуры, включение программы в процедуру, контроль поправок программы на соответствующие антропометрические данные; з) система проверяются на наличие в картридже необходимых наконечников, в случае необходимости по плану процедуры, наконечники для ввода лекарственных веществ заряжаются лекарственными веществами. При необходимости, определенные наконечники определенным образом обрабатываются (снаряжаются необходимыми веществами). При необходимости система смазывания наконечников снаряжается (заряжается) необходимыми веществами;
9.3.2. пациента одевают определенным образом, и садят на кресла определенным образом; - чтобы во время процедуры не происходило смещение пациента, его фиксируют к креслу специальными ремнями; - для достижения нужного уровня доступности промежности, манипулируют особым образом частями сиденья, и валиками сиденья; - с помощью визуального визира оцентровывают оборудование, относительно входов в полости.
9.3.3 процедура начинается под контролем врача, врач голосом предупреждает о манипуляциях, которые будут происходить, с целью предупреждения пациента к предстоящим ощущениям. Даже полностью автоматическая процедура при первом посещении должна происходить под контролем врача. В случае если строение тела пациента и клинический случай стандартный, и выбранная процедура стандартная и полностью автоматическая, и при первом проведении сеанса не возникло проблем в проведении процедуры, последующие процедуры курса могут производиться медсестрой без врача (на усмотрение врача, под его ответственность).
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный боевой комплекс | 2018 |
|
RU2724448C1 |
| УСТРОЙСТВО ДЛЯ МАССАЖА | 2008 |
|
RU2389470C1 |
| КРЕСЛО ДЛЯ МАССАЖА | 2009 |
|
RU2403005C1 |
| ПЕРЕДВИЖНОЕ МАССАЖНОЕ КРЕСЛО С ПОДСТАВКОЙ | 2024 |
|
RU2841133C1 |
| Кресло-тренажер | 1985 |
|
SU1326294A1 |
| ЛЕЧЕБНО-ОЗДОРОВИТЕЛЬНОЕ УСТРОЙСТВО | 2002 |
|
RU2236211C2 |
| МАССАЖНЫЙ МЕХАНИЗМ МАССАЖНОГО КРЕСЛА | 2024 |
|
RU2821651C1 |
| Кресло микрохирурга | 2017 |
|
RU2672019C1 |
| Роботизированное кресло-тренажер | 2024 |
|
RU2837297C1 |
| Массажное кресло | 1989 |
|
SU1692578A1 |
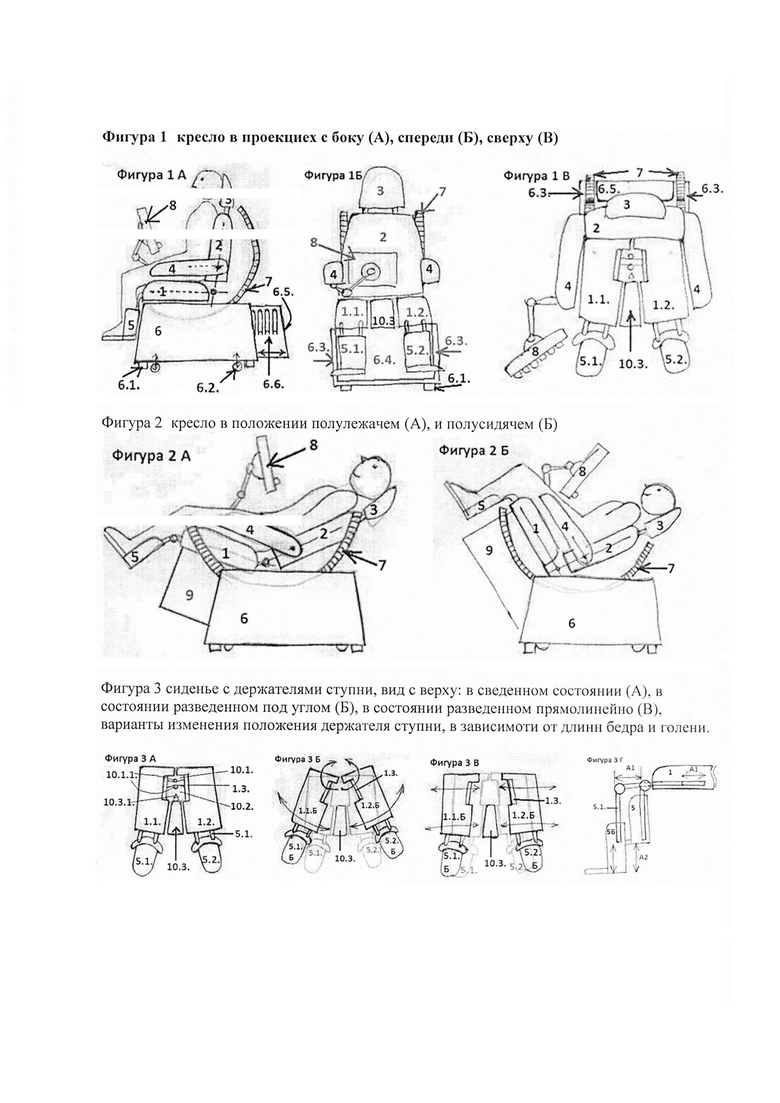
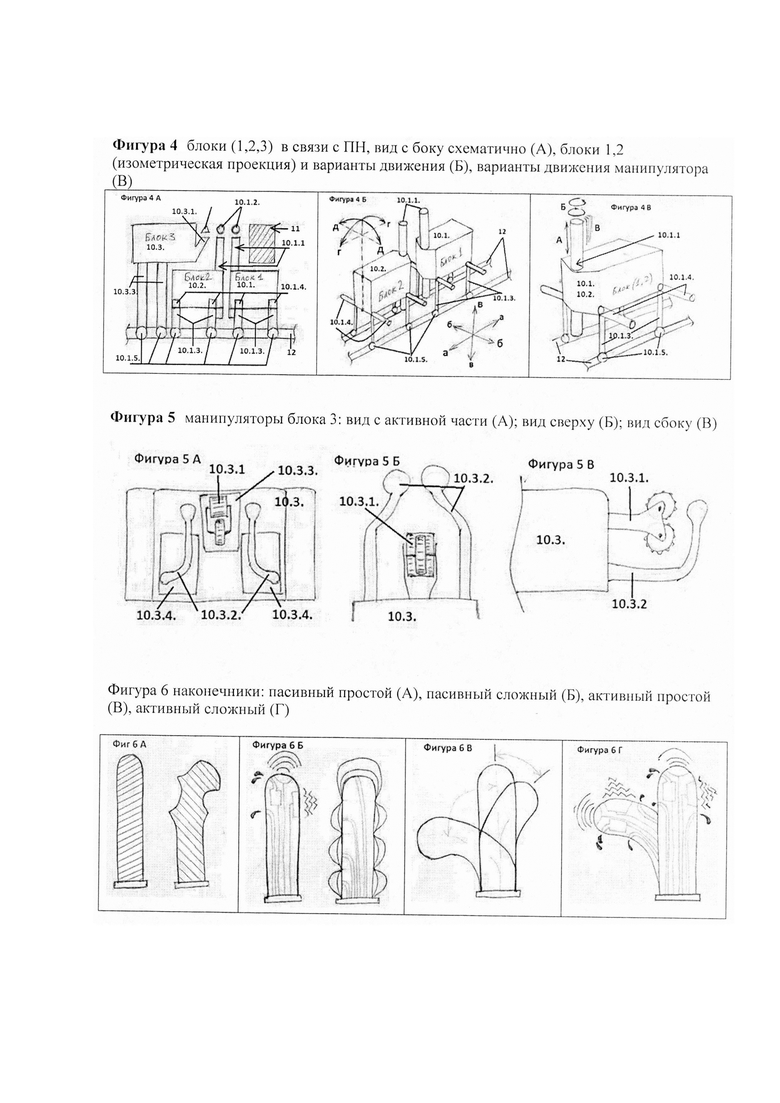
Группа изобретений относится к области медицины и направлена на возможность проведения лечебных и массажных процедур в автоматическом и автоматизированном режимах, а также при нахождении врача удаленно от пациента. Кресло многофункциональное, роботизированное, с программным управлением, для медицинских, лечебных, профилактических, диагностических, тренировочных и иных процедур полостей полых органов малого таза, характеризующееся исполнением в виде собственно кресла, состоящего из подвижно сочлененных составных элементов: сиденья и спинки со встроенными элементами механического массажа и подогрева: бедер сзади, ягодиц, крестца, поясницы и спины; держателей ступни с голенью, прикрепленных к частям сиденья; подлокотников; подголовника; основания, имеющего опоры для неподвижной установки и колесики для перемещения путем качения. Кресло способно менять положение от сидячего к лежачему, используя для движения составных элементов электромеханический и гидравлический приводы. При этом используется полностью роботизированная система, состоящая из «манипуляционного блока» и «наконечников», управляемых посредством «панели управления» с программным управлением, для автоматизированных и автоматических медицинских манипуляций, лечебного, профилактического, диагностического, тренировочного и иного характера с полыми органами малого таза, такими как: влагалище, прямая кишка, анус, уретра, а также с привагинальной и прианальной областями, для решения медицинских задач в областях: гинекология, урология, андрология, колопроктология, сексология, психология. 4 н. и 21 з.п. ф-лы, 19 ил.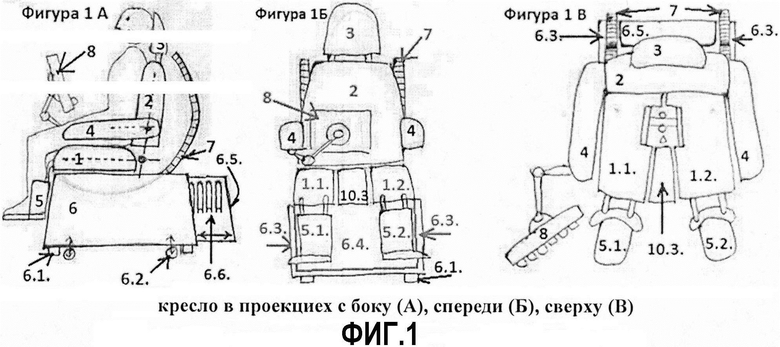
1. Кресло многофункциональное, роботизированное, с программным управлением (ЧПУ), для медицинских, лечебных, профилактических, диагностических, тренировочных и иных процедур полостей полых органов малого таза,
характеризующееся исполнением в виде собственно кресла,
состоящего из подвижно сочлененных составных элементов: сиденья и спинки со встроенными элементами механического массажа и подогрева: бедер сзади, ягодиц, крестца, поясницы и спины; держателей ступни с голенью, прикрепленных к частям сиденья; подлокотников; подголовника; основания, имеющего опоры для неподвижной установки и колесики для перемещения путем качения,
способного менять положение от сидячего к лежачему, используя для движения составных элементов электромеханический и гидравлический приводы,
отличающееся использованием полностью роботизированной системы (далее PC), состоящей из «манипуляционного блока» и «наконечников», управляемых посредством «панели управления» с программным управлением (ЧПУ), для автоматизированных и автоматических медицинских манипуляций, лечебного, профилактического, диагностического, тренировочного и иного характера с полыми органами малого таза, такими как: влагалище, прямая кишка, анус, уретра, а также с привагинальной (область внешних половых органов, и прианальной областями, для решения медицинских задач в областях: гинекология, урология, андрология, колопроктология, сексология, психология.
2. Кресло по п. 1, отличающееся тем, что функционирование всех движущих элементов кресла как элементов собственно кресла, так и роботизированной системы, происходит в автоматическом режиме, когда процедура манипуляций прописана специальной программой, или в автоматизированном режиме, когда управление манипуляциями происходит через панель управления врачом или пациентом.
3. Кресло по п. 1, отличающееся тем, что сиденье кресла состоит из двух частей, подвижных друг относительно друга, причем части сиденья могут раздвигаться и сдвигаться, прямолинейным или угловым направлением, а к передним, фронтовым, торцам частей сиденья, прикреплены подвижно держатели ступни и голени, причем в зависимости от размеров бедра и голени пациента, продольные размеры держателя ступни и голени меняются.
4. Кресло по п. 3, отличающееся тем, что части сиденья в области промежности образуют выемки, образуя «паховое отверстие сиденья», по бокам от пахового отверстия имеют валики, вращение которых автоматизированно, и служит для отодвигания мягких тканей промежностей от пахового отверстия, а в передней, противоположной от спинки, части, между частями сиденья, располагается «дополнительный блок№3» роботизированного механизма PC.
5. Кресло по п. 1, отличающееся тем, что внутри основания, закрытого щитами со всех сторон, размещена роботизированная система, состоящая из подвижно сочлененных: систем различных рам и направляющих; трех блоков роботизированных механизмов (далее «манипуляционный блок»), из которых один дополнительный (блок №3) и два основных (блоки №1, 2); «картриджа наконечников»; компьютерной системы для установки ПО, причем все движения в PC производятся автоматически и автоматизированно и подчинены ПО.
6. Кресло по п.п. 1, 2, 5 отличающееся тем, что компьютерный блок на который остановлена ПО кресла, и который управляет всеми движениями в кресле, в том числе всей роботизированной системой, может быть установлен как внутри основания, так и внутри корпуса спинки, в зависимости от варианта реализации, причем ПК, кроме стандартной гарнитуры имеет: wi-fi приемник, соединение с панелью управления пациента, соединение с блоком управления механикой робота, и всеми остальными элементами движения в кресле.
7. Манипуляционные блоки по пп. 1 и 5, в количестве трех, роботизированной системы кресла, отличающиеся тем, что являются главной функциональной частью роботизированной системы, посредством которой происходят манипуляции «наконечниками», которые контактируют непосредственно с телом пациента при проведении процедуры.
8. Блоки по п. 7, отличающиеся тем, что из используемых PC блоков два блока являются «основными» и нумеруются: блок №1, имеет один манипулятор для процедур с толстым кишечником, анусом и прианальной областью; блок №2, имеет один манипулятор для процедур с влагалищем, уретрой и превагинальной областью, и один блок «дополнительный» блок №3, имеет один не парный и два парных манипулятора для процедур с областью женских внешних половых органов.
9. Блоки по пп. 7 и 8, отличающиеся тем, что все они, посредством системы рам и направляющих, могут двигаться в любых направлениях как прямолинейно, так и под углом, на расстояния и углы, достаточные для реализации заявленных процедур, причем все движения блоков производятся автоматически и автоматизированно и подчинены «панели управления» с предустановленной ПО.
10. Блоки по пп. 7-9 отличающиеся тем, что основные блоки (1, 2) функционально одинаковы, но расположены вдоль средней продольной линии кресла (PC), активными сторонами друг к другу, т.е. ориентированные активной стороной не в одном направлении, причем используют сменные «наконечники» из «картриджа наконечников», а дополнительный блок (3) функционально отличается от блоков 1 и 2, он также расположен вдоль средней продольной линии кресла (PC), между передними частями сиденья, активной стороной направлен к спинке, причем используются постоянные (стационарные) наконечники, которые не меняются автоматически, но снимаются вручную, для ручной замены, для дезобработки, в нерабочем режиме оборудования, причем для блока 3 используется набор наконечников, отличающихся размерами, для пациентов разных размеров.
11. Блоки по пп. 7-10, отличающиеся тем, что все блоки своей составной частью имеют крайне подвижные манипулятор(ы), который(е) имеет дополнительные свободы движения относительно блока, к которому присоединяются «наконечники», причем манипулятор(ы) блоков 1 и 2 движутся: прямолинейно возвратно, вдоль своей оси, в обоих направлениях, вращаются вокруг своей оси, в обоих направлениях, производят вибрационные движения, разной амплитудой и частотой, в разном направлении, причем система блоков и ПО кресла позволяют работать всем блокам, в том числе всем манипуляторам блока 3, одновременно, не мешая друг другу.
12. Панель управления креслом (ПУ) по пп. 1 и 9, отличающаяся тем, что используется для программирования процедур, с целью работы в автоматическом режиме, и для проведения процедур в автоматизированном режиме, и для оцентровки системы перед процедурой, и для визуального контроля за протеканием процедуры, и для голосового и визуального контакта пациента с врачом, и для и для контроля диагностических параметров, в процессе процедуры, причем ПУ делится на: ПУ пациента, с интерфейсом пациента, и ПУ врача, с интерфейсом врача.
13. Панель управления по п. 12 отличающаяся тем, что панель управления пациента представляет собой блок с сенсорным экраном, с механическими кнопками и с механическими вращательными регуляторами, имеет 2 порта USB, гнездо для наушников, встроенная вэб-камера, колонка, микрофон, причем через ПУ пациента может транслироваться видео, причем ПУ пациента прикреплена посредством подвижно сочлененных штанг к правому подлокотнику, или к спинке справа, в зависимости от варианта реализации, причем по умолчанию на ней открыт интерфейс пациента, причем интерфейс пациента имеет меньше функциональных возможностей по сравнению с интерфейсом врача.
14. Панель управления по п. 13, отличающаяся тем, что панель управления врача представляет собой обыкновенный классический персональный компьютер или ноутбук с предустановленным на него ПО интерфейса врача, в связи с этим работа в интерфейса врача происходит с помощью классических клавиатуры и мышки, причем, при необходимости, интерфейс врача может быть загружен на ПУ пациента.
15 Панель управления по п. 14 отличающаяся тем, что панель управления врача соединена с ПО кресла посредством интернет-кабеля локально, или через интернет, в связи с чем ПУ врача может находиться удаленно.
16. Панель управления по п. 15, отличающаяся тем, что ПУ и интерфейс врача, находящегося в одном кабинете с креслом, никак не отличается от ПУ и интерфейсом врача, находящегося удаленно, на любом расстоянии от кабинета, причем ПО и ПУ кресла позволяют реализовать прямой аудио-, видеоконтакт в режиме реального времени между ПУ врача и ПУ пациента.
17. Панель управления по п. 12, отличающаяся тем, что в качестве ПУ технической поддержки (она ПУ программиста) может выступать как ПУ пациента, так и ПУ врача, так и любой другой компьютер, подключенный к интернет и имеющий предустановленное ПО любого уровня доступа, причем на выбранную ПУ загружается интерфейс программиста, причем интерфейс программиста более функционален, чем интерфейс врача.
18. Панель управления по п. 12, отличающаяся тем, что, при необходимости, планируется использование интерфейса любого уровня функциональности, в браузером варианте, при котором пользователь сможет работать с ПО кресла, через любой компьютер, подключенный к интернету, даже если на него не предустановлено ПО интерфейса.
19. Панель управления по п. 12, отличающаяся тем, что, при необходимости, планируется использование интерфейса ПУ любого уровня функциональности, в виде приложений для планшетов и смартфонов.
20. Наконечники, в ассортименте по пп. 1, 5, 7, 10, 11, отличающийся тем, что используется для медицинских, лечебных, диагностических и иных процедур, в качестве элемента роботизированной системы, непосредственно контактирующего с телом пациента, причем в зависимости от размеров и особенностей строения внутренних органов пациента, в зависимости от клинического случая и от разновидности выбранной процедуры наконечники обладают разными размерами, формами и иными характеристиками и функциями.
21. Наконечники по п. 29, отличающиеся тем, что имеют одинаковый разъем соединения с манипуляторами блоков 1 и 2, устроены так, что в готовом для работы состоянии наконечники размещены в картридже PC, причем в систему картриджа наконечников встроена система смазывания наконечников, работающая автоматически и автоматизированно, причем в процессе процедуры манипуляторы блоков захватывают наконечники из картриджа и возвращают наконечники в картридж в автоматическом и автоматизированном режимах, причем у «активных» и «сложных» наконечников дополнительно реализуется система передачи через манипулятор различных функций, посредством электричества, светопроводящих волокон, воздуха, жидкостей, активных веществ и пр.
22. Наконечники по п. 30, отличающиеся тем, что по форме, размерам и упругости материала отличаются в зависимости от: размеров пациента; выбранного для процедуры органа или области; особенностей анатомического строения выбранного полого органа; клиники; выбранного метода воздействия: способа лечения; тренировки; диагностики и пр.
23. Наконечники по пп. 30-31, отличающиеся тем, что по способности или неспособности активно, программированно, менять свою форму делятся на «пассивные», у которых не предусмотрено активное изменение формы, массив тела которых, как правило, состоит из однородного аморфного материала, изменение формы которого ограничены характеристиками пластичности и гибкости, движения которых определяются только движением манипулятора блока, к которому крепится наконечник, и «активные», которые способны активно менять форму: менять объемы; изгибаться, в тело которых встроены механизмы движения, на электромеханической или гидравлической тяге, которые используются для увеличения качества механических процедур, в том числе в труднодоступных местах полых органов.
24. Наконечники по пп. 30-32, отличающиеся тем, что по набору функциональных возможностей делятся на «простые», которые не являются носителями никаких иных функций, кроме функции механического воздействия наконечником на ткани пациента, вариантов массажа, и «сложные», которые, кроме функции механического воздействия несут и иные функции: лечебные; диагностические; тренировочные и пр., например: доставка к месту лекарственных веществ, в том числе и инъекционным способом, аппликации, орошения; физио-процедурные воздействия различной природы; диагностика УЗИ, скопическая, термография и пр.; взятие различных сред на анализ, в том числе биопсия; тренировка мышц органов и пр., причем для реализации подобных функций наконечники оборудуются необходимыми механизмами.
25. Наконечники по п. 29, отличающиеся тем, что в блок 3 встроен набор наконечников не сменный, постоянный (стационарный), причем в процессе функционирования наконечники блока 3 активно движутся, но не меняются, причем наконечники блока 3 снимаются из манипуляторов блока 3 вручную, для ручной замены, или ручной дезобработки.
| МАССАЖНОЕ КРЕСЛО | 1998 |
|
RU2135060C1 |
| МАССАЖНОЕ КРЕСЛО | 2005 |
|
RU2283077C1 |
| CN 201157524 Y, 03.12.2008 | |||
| TW 200714273 A, 16.04.2007 | |||
| RU 2012112709 A, 10.10.2013 | |||
| СПОСОБ МАССАЖА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2145833C1 |
| JP 2015091341 A, 14.05.2015. | |||

