Изобретение относится к контролю в нефтедобывающей промышленности и предназначено для исследования работы скважииных шгангсшых насосов.
Цель изобретения - повышение надежности конструкции и точности измерений,
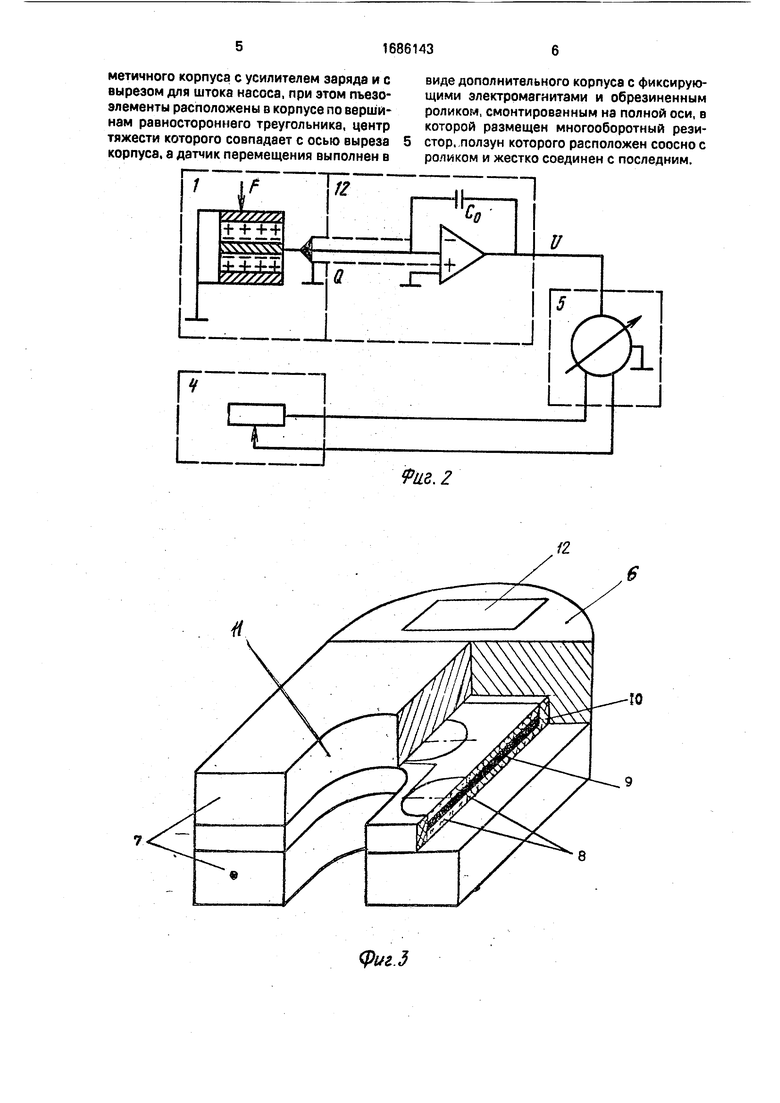
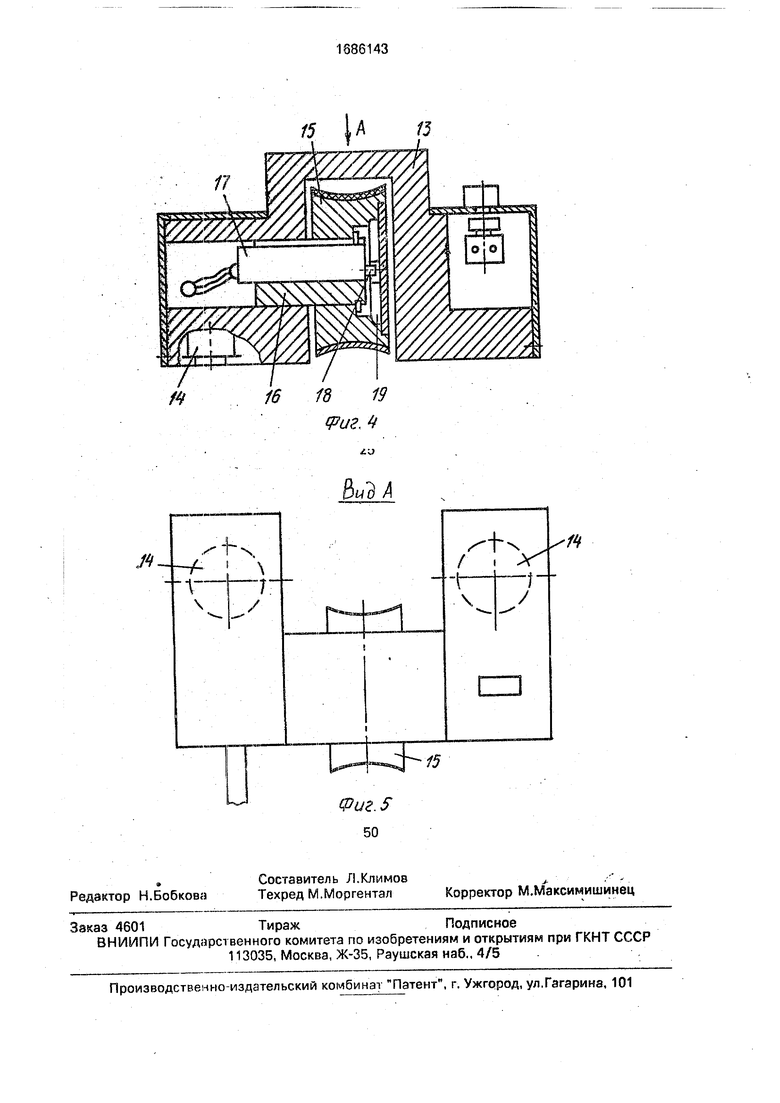
Из Фиг. представлена монтажная схема динамографа; на фиг. 2 - принципиальная схема динамо рафа; на фиг. 3 - датчик усилия с усилителем заряда, общий вид; на фиг. 4 - датчик перемещения, общий вид; на фиг. 5 - вид Л на фиг, 4.
Дичамограф для контроля работы сква- жинных штанговых насосов содержит датчик 1 усилия, установленный на канатной подвеске станка-качалки 2 скважинного штангового насоса. Для определения величины перемещения полированного штока 3 насосэдинамограф содержит датчик 4 перемещения, взаимодействующий со штоком 3. Датчики 1 и 4 соединены с самопишущим прибором-регистратором 5.
Датчик 1 усилия выполнен в виде герметичного корпуса 6 с двумя силовводящими деталями в виде металлических пластин 7. Между последними расположены три пары х-среза ьъезоэлементов 8, выполненных в форме дисков, между которыми расположен электрод 9, изолированный от пластин 7 прок; адками 10 из фоторопласта.
В корпусе 6 выполнен вырез 11 для полированного штока 3, а пъезоэлементы 8 расположены по вершинам воображаемого равностороннего треугольника, центр тяжести которого совпадает с осью выреза 11. В корпусе 6 установлен усилитель 12 заряда для преобразования заряда с выходом датчика 1 в удобную для измерения и регистрации величину-напряжение постоянного тока.
Датчик 4 перемещения выполнен в виде дополнительного корпуса 13 с Фиксирующими электромагнитами 14 и обрезиненным роликом 15, смонтированным нз полой оси 16. В последней размещен многооборотный резистор 17, ползун 18 котооого расположен соосно с роликом 15 и жестко соединен с ним планкой 19.
Дингмогрзф работает следующим образом.
В процессе работы станка-качалки 2 усилия, возникающие в канатной подвеске, передаются на датчик 1 усилия, а возвратно-поступательное движение штока 3 передается на ролик 15 датчика 4 перемещения.
Измеряемое датчиком 1 усилие распределяется между тремя парами пъезозлемен- тов 8. Составляющие этого усилия вызывают появление электростатических зарядов на каждом из трех пъезозлементов 8. Все заряды интегрируются одним электродом 9. Это позволяет при нецентричном приложении усилия получать неизменный суммарный заряд, вследствие этого показания датчика 1
не зависят от точки приложения усилия,
Высокая стабильность чувствительности датчика 1 обеспечивается точностью ориентации среза кварцевых пъезоэлемен- тов 8, которая может быть доведена до не0 скольких угловых минут. При этом разброс чувствительности пьезоэлементов 8 может составлять 10 %. Естественной выходной величиной датчика 1 является электрический заряд,
5 Значение чувствительности пьезоэлементов 8 определяется пьезоэлектрическими константами кристаллического кварца для пластин х-срезов, составляет 2,3 пКл/Н, т. е. и при нагрузке 10 кН датчик 1 генери0 рует заряд 4,6 К.
Усилитель 12 заряда преобразует выходной заряд в более удобную для измерения и регистрации величину-напряжение постоянного тока. Вращение ролика 15дат5 чиком передается резистору 17 посредством планки 19 и ползуна 18. При этом меняется напряжение на выходе датчика 4. По величине изменения напряжения судят о величине перемещения штока 3 станка-ка0 чалки 2,
Сигналы от датчиков 1 и 4 передаются на самопишущий прибор-регистратор 5, предназначенный для регистрации в прямоугольной системе координат зависимости
5 двух функционально связанных параметров. При этом по горизонтальной координате регистрируется перемещение штока 3, по вертикальной - усилие.
Динамометрирование работы штанго0 вого скважинного насоса с помощью предлагаемого пъезокварцевого динамографа позволит более точно оценить показатели работы насоса.
Высокая стабильность параметров пре5 образования, малый температурный коэффициент в широком диапазоне температур, простая измерительная схема позволят получить динамограммы высокой точности для углубленного исследования работы нефте0 добывающих скважин, оборудованных штанговыми насосами.
Формула изобретения Динамограф для контроля работы сква- жинных штанговых насосов, содержащий
5 датчик усилия с пьезоэлементами и усилителем заряда, и датчик перемещения, взаимодействующий со штоком насоса, отличающийся тем, что, с целью повышения надежности конструкции и точности измерения, датчик усилия выполнен в виде герметичного корпуса с усилителем заряда и с вырезом для штока насоса, при этом льезо- элементы расположены в корпусе по вершинам равностороннего треугольника, центр тяжести которого совпадает с осью выреза корпуса, а датчик перемещения выполнен в
виде дополнительного корпуса с фиксирующими электромагнитами и обрезиненным роликом, смонтированным на полной оси, в которой размещен многооборотный резистор, ползун которого расположен соосно с роликом и жестко соединен с последним.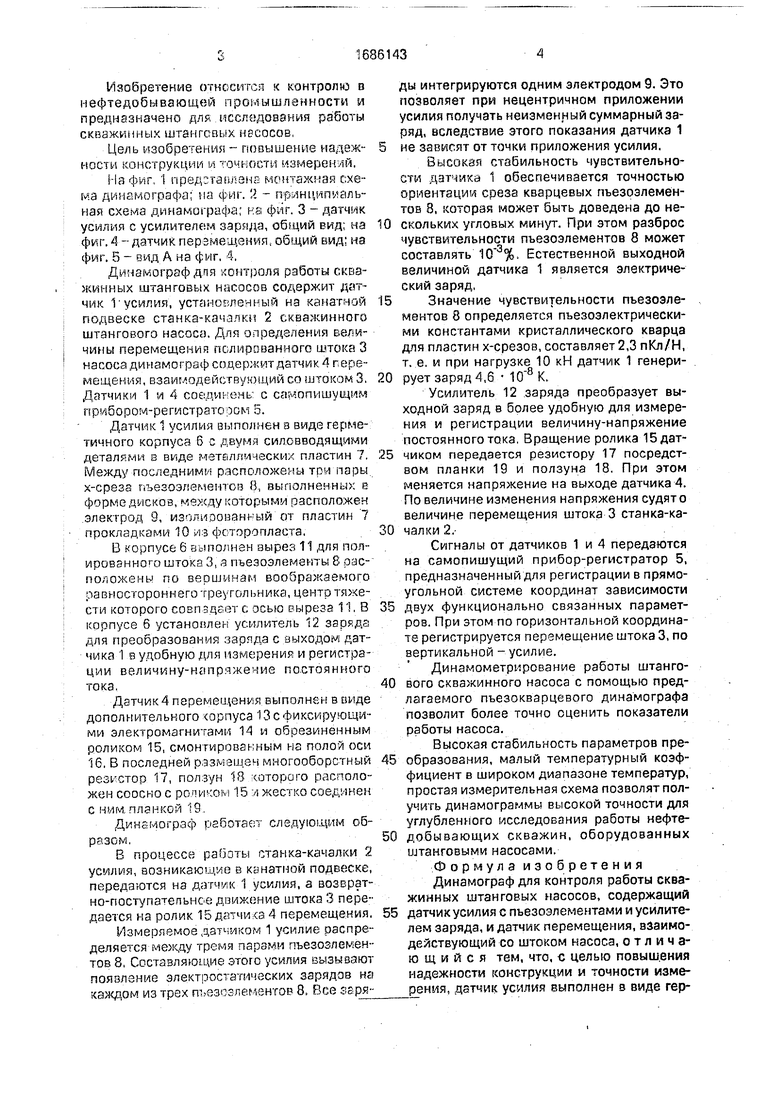
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ СОСТОЯНИЯ ЭКСПЛУАТАЦИОННЫХ СКВАЖИН | 1998 |
|
RU2148709C1 |
| ДИНАМОГРАФ ДЛЯ КОНТРОЛЯ РАБОТЫ СКВАЖИННЫХ ШТАНГОВЫХ НАСОСОВ | 1996 |
|
RU2113619C1 |
| Динамограф преимущественно для скважинных штанговых насосов | 1991 |
|
SU1772421A1 |
| УСТРОЙСТВО ДЛЯ ДИНАМОМЕТРИРОВАНИЯ ШТАНГОВЫХ ГЛУБИННЫХ НАСОСОВ (ВАРИАНТЫ) | 2000 |
|
RU2176032C1 |
| БЕСПРОВОДНОЙ ДИНАМОГРАФ ДЛЯ КОНТРОЛЯ РАБОТЫ СКВАЖИННЫХ ШТАНГОВЫХ НАСОСОВ | 2014 |
|
RU2546376C1 |
| Канатная подвеска | 1979 |
|
SU821746A1 |
| Способ уравновешивания балансирного станка-качалки | 1989 |
|
SU1652654A1 |
| ПРЕОБРАЗОВАТЕЛЬ УСИЛИЙ НА КАНАТНОЙ ПОДВЕСКЕ | 1997 |
|
RU2143104C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИРОВАНИЯ СОСТОЯНИЯ СКВАЖИННОГО ГЛУБИННОНАСОСНОГО ОБОРУДОВАНИЯ | 1999 |
|
RU2168653C2 |
| Устройство для динамометрирования скважинного штангового насоса | 1985 |
|
SU1265396A1 |
Изобретение относится к контролю в нефтедобывающей промышленности. Цель изоЬретения - повышение надежности конструкции и точности измерений Динамограф для контроля работы скважинных штанговых насосов (Н) содержит датчик 1 усилия, новленный на канатной подвеске станка качалки 2 Н. Датчик 4 перемещения установлен с возможностью взаимодействия со штоком 3 Н. Датчики 1 и 4 соединены с самопишущим прибором-регистратором 5. Датчик 1 выполнен в виде герметичного корпуса (К) с вырезом для штока 3. В герметичном К по вершинам равностороннего треугольника, центр тяжести которого совпадает с осью выреза, расположены пьезоэлементы, а также усилитель заряда. Датчик 4 перемещения выполнен в виде дополнительного К с фиксирующими электромагнитами и обре- зиненным роликом (Р), смонтированным на полой оси. В последней размещен многооборотный резистор, ползун которого расположен соосно с Р и жестко соединен с ним Усилия, возникающие в канатной подвеске, передаются на датчик 1, а возвратно-поступательное движение штока 3 передается на Р датчика 4. Усилитель заряда преобразует заряд с выхода датчика 1 в напряжение посто- янного тока. Вращение Р датчика 4 преобразуется в напряжение на выходе последнего. Сигналы отдатчиков 1 и 4 передаются на самопишущий прибор-регистратор 5, предназначенный для регистрации в прямоугольной системе координат зависимости двух функционально связанных параметров. Динамометрирование работы штангового скважинного Н с помощью данного пъезокварцевого динамографа позволяет более точно оценивать показатели работы Н. 5 ил. (Л С о 00 ON Ј GO Фиг I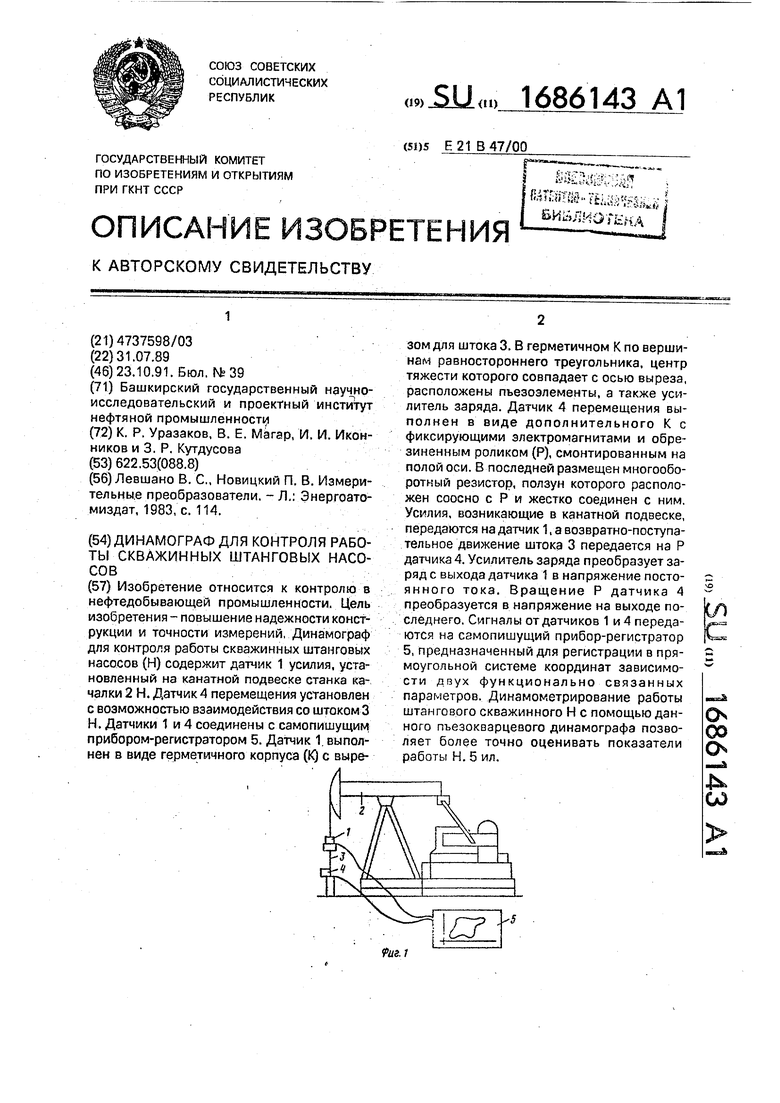
#
Фиг. 2
8
фигЗ
я.
V
-к
1
/
Г-И
UUF
ts
/ . л
лч
-t
-г ;
CD
15
| Левшано В | |||
| С., Новицкий П | |||
| В | |||
| Измерительные преобразователи | |||
| - Л. | |||
| Энергоато- миздат, 1983, с | |||
| Способ получения борнеола из пихтового или т.п. масел | 1921 |
|
SU114A1 |
