Изобретение относится к радиотехнике, в частности к радиолокации и системам обработки сигналов различного вида. Использование изобретения позволит в современных радиолокационных системах (РЛС), использующих цифровую обработку сигналов, с наибольшей достоверностью преобразовать сигналы в цифровую форму.
В настоящее время в РЛС различного назначения осуществляется как аналоговая, так и цифровая (дискретная) обработка сигналов. Основным недостатком аналоговых устройств обработки сигналов является нестабильность во времени параметров этих устройств, требующая наличия достаточно большого количества различных регулировок и юстировок.
Во всех РЛС, в которых выполняется цифровая обработка сигналов, в силу ограниченного быстродействия вычислителей, преобразование сигналов в цифровую форму осуществляют на пониженной частоте. При этом, в связи со случайным характером начальной фазы сигналов, основной проблемой, возникающей при переводе их на пониженную частоту и дальнейшем преобразовании в цифровую форму, является обеспечение высокой достоверности упомянутого преобразования, то есть обеспечение заданной точности соответствия цифровой формы преобразованного сигнала его аналоговому значению и постоянный контроль работоспособности устройства, осуществляющего данные преобразования.
Для обеспечения заданной точности соответствия цифровой формы преобразованного сигнала аналоговому сигналу при преобразованиях необходимо учитывать как огибающую сигнала, так и его фазу, при этом требуется, чтобы преобразование происходило в реальном времени на частоте в 10-100 раз большей, чем ширина спектра преобразуемого сигнала.
Известны одноканальный [1, стр. 30-33] и двухканальный [1, стр. 33-35, 61-62, 146-147, 237-238] способы преобразования сигнала в цифровую форму. В литературе встречаются и другие названия данных способов: так одноканальный способ иногда называют однофазным, а двухканальный - двухфазным или квадратурным.
Основной недостаток одноканального способа связан с тем, что заданная достоверность преобразования при таком способе может быть обеспечена на частотах в 20-80 раз больших, чем частота, на которой может быть осуществлена реализация двухканального способа. Это обстоятельство, при реализации одноканального способа, обусловливает значительно более высокие требования к вычислителям и значительно усложняет устройство преобразования сигналов.
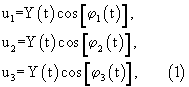
Из известных технических решений наиболее близким (прототипом) является двухканальный способ преобразования сигнала в цифровую форму, приведенный в [1, стр. 146-147]. Суть способа заключается в том, что преобразуемый аналоговый сигнал вида uпр=Ycсos[2π fct+ϕ c(t)] (где Yc, fc, ϕ с - соответственно амплитуда, частота и фаза сигнала, t - текущее время) разделяют на два канала обработки. В первом канале преобразуемый сигнал перемножают с опорным сигналом вида uoп1=Yoпcos2π fопt, где Yоп - амплитуда опорного сигнала; fоп - частота опорного сигнала, равная частоте принимаемого радиосигнала. Во втором канале преобразуемый сигнал перемножают с опорным сигналом вида uoп2=Yoпsin2π fопt, отличающимся от опорного сигнала, используемого в первом канале, сдвигом фазы на 90° . В результате перемножения соответствующих сигналов в упомянутых каналах формируют сигналы u1=Y(t)cos[ϕ 1(t)] и u2=Y(t)cos[ϕ 2(t)], соответственно, где Y(t), ϕ 1(t), ϕ 2(t) - соответственно амплитуда и фазы сформированных сигналов, которые далее фильтруют от шумов и составляющих сигналов с удвоенной частотой, переводят в цифровой вид, формируя u1ц, u2ц - цифровые образы сигналов u1, u2 [2, стр. 176], и по формулам

вычисляют амплитуду U(t) и фазу Ф(t) цифрового сигнала
uц=U(t)cosФ(t).
Полученный цифровой сигнал uц выдают далее различным потребителям для его дальнейшей обработки. В качестве потребителей обычно выступают пеленгаторы, дальномеры, измерители скорости и др.
Недостаток рассмотренного квадратурного способа заключается в том, что при выходе из строя одного из его каналов, устройство, в котором реализуется данный способ, становится неработоспособным. Кроме этого, при проведении проверки работоспособности устройства, в котором реализуется данный способ, удается охватить не более 30-50% функциональных узлов, входящих в его состав, что не позволяет достоверно оценить правильность упомянутых преобразований.
Таким образом, задачей изобретения является обеспечение более высокой достоверности преобразований аналоговых сигналов в цифровую форму, а также повышение надежности устройств, выполняющих указанные преобразования.
Для облегчения понимания средств достижения поставленной задачи, поясним физические принципы, положенные в основу заявляемого способа. Если преобразование сигналов в цифровую форму осуществлять в трех каналах обработки, фазы опорных сигналов в которых сдвинуты относительно друг друга на 120° , то сигналы на выходе первого, второго и третьего каналов, соответственно, будут иметь вид x=Y(t)cos[ϕ 1(t)], y=Y(t)cos[ϕ 2(t)], z=Y(t)cos[ϕ 3(t)], где Y(t) и ϕ 1(t), ϕ 2(t), ϕ 3(t) - соответственно амплитуда и фазы сигналов. Наличие трех сигналов, полученных из исходного перемножением последнего на сигналы одинаковой амплитуды с фазами, отличающимися на 120° , дает возможность:
1) представить преобразуемый сигнал в виде комплексного числа
A=Yej0+Yej2π /3+Yej4π /3,
где Y - амплитуды составляющих этого числа; еj0, еj2π /3, еj4π /3 - базисные векторы трехфазной системы, е - основание натурального логарифма; j - мнимая единица;
2) проверить качество выполнения любых преобразований такого сигнала, как комплексного числа, по величине суммы этих сигналов
∑ =x+y+z.
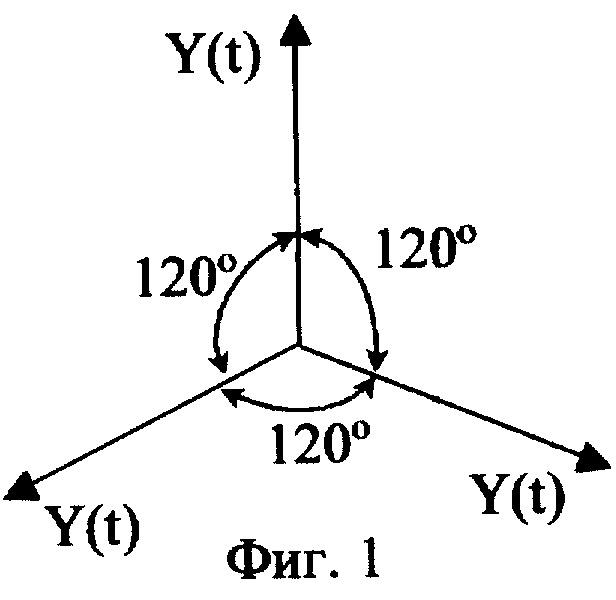
При идеальных преобразованиях сумма ∑ =0. Данное утверждение можно легко доказать, если представить упомянутые сигналы в виде трех векторов, приведенных на фиг.1: сумма трех векторов одинакового модуля и развернутых друг относительно друга на 120° равна нулю.
Если сумма ∑ ≠ 0, можно однозначно утверждать, что при преобразованиях допущены ошибки, причем, чем больше значение ∑ , тем больше степень искажения исходного сигнала. Задавшись ∑ контр 1 - контрольным значением упомянутой суммы, можно предъявить к преобразованию такого сигнала требования по допустимым искажениям. При таком подходе, при констатации факта

считают, что преобразования выполнены с допустимыми ошибками, в противном случае - с недопустимыми;
3) при невыполнении условия (1) оценить работоспособность любого из упомянутых каналов (пропадание в нем сигнала) по результатам сравнения сумм
∑ 1=x+y; ∑ 2=x+z; ∑ 3=z+y,
с ∑ контр 2 - другой контрольной суммой.
Если одна из сумм ∑ 1, ∑ 2 или ∑ 3 больше ∑ контр 2, то констатируют факт выхода из строя канала, сигнал которого не используется в данной сумме. Например, если ∑ 2&γτ;∑ контр 2, то можно утверждать, что неисправен канал, где формируют сигнал “у”.
Если все суммы ∑ 1, ∑ 2 и ∑ 3 меньше ∑ контр 2, то констатируют факт неработоспособности преобразователя и преобразования прекращают;
4) при констатации факта неработоспособности одного из каналов, преобразование исходного сигнала осуществлять при использовании работающих любых двух каналов.
Итак, в заявленном способе: 1. Преобразуемый сигнал вида uпр=Yccos[2π fct+ϕ c(t)] разделяют на три канала обработки. В первом канале его перемножают с опорным сигналом вида uоп1=Yопcos2π fot. Во втором канале его перемножают с опорным сигналом вида uoп2=Yoпcos(2π fot+2π /3), отличающимся от опорного сигнала, используемого в первом канале, сдвигом фазы на 120° . В третьем канале его перемножают с опорным сигналом вида uoп3=Yoпcos(2π fot+4π /3), фаза которого равна 240° . В результате перемножения в первом, втором и третьем каналах формируют сигналы

соответственно, где Y(t) - амплитуда сигналов; ϕ 1(t), ϕ 2(t), ϕ 3(t) - фазы сигналов. Каждый из упомянутых сигналов в соответствующем канале известным способом [1, стр. 66-69, 98, 111] фильтруют от шумов и составляющих сигналов с удвоенной частотой. Отфильтрованные сигналы известным способом [2, стр. 175-176] преобразуют в цифровой вид, то есть формируют u1ц, u2ц, u3ц - цифровые образы сигналов u1, u2, u3, и формируют цифровой сигнал

для которого амплитуду U(t) и фазу Ф(t) определяют известным способом по амплитудам и фазам сигналов u1, u2, и u3 как элементам трехфазной системы A=Yej0+Yej2π /3+Yej4π /3.
Полученный цифровой сигнал uц(t) выдают далее потребителям для его дальнейшей обработки.
Периодически в процессе выполнения вышеописанных преобразований осуществляют проверку их достоверности. Суть проверки заключается в том, что от входов всех каналов отключают uпр преобразуемый сигнал и подключают к ним uис - сигнал от имитатора сигналов, как эталонный. Поскольку параметры uис сигнала имитатора сигналов полностью известны, то, осуществив над ним вышеописанную последовательность действий, по полученным цифровым сигналам u1ц, u2ц, u3ц осуществляют контроль достоверности преобразований путем сравнения суммы ∑ =u1ц+u2ц+u3ц, полученной сложением сигналов с выходов всех каналов, с ∑ контр 1 - контрольным значением этой суммы. При этом, если ∑ ≤ ∑ контр 1, то считают, что преобразования выполняют с допустимыми ошибками, и описанный выше процесс преобразований возобновляют. Если ∑ ≤ ∑ контр 1, то считают, что преобразования выполняют с недопустимыми ошибками, и процесс преобразований прекращают.
2. Преобразование возможно и при ∑ ≤ ∑ контр 1, но тогда работоспособность упомянутых каналов оценивают путем сравнения сумм ∑ 1=u1ц+u2ц, ∑ 2=u1ц+u3ц и ∑ 3=u2ц+u3ц, полученных сложением сигналов с выходов соответствующих каналов, с ∑ контр 2 - другим контрольным значением сумм.
При этом:
а) если все суммы ∑ 1, ∑ 2 и ∑ 3 меньше ∑ контр 2, то считают, что преобразования выполняют с недопустимыми ошибками, и их прекращают;
б) если одна из сумм ∑ 1, ∑ 2 или ∑ 3 больше ∑ контр 2, то констатируют факт выхода из строя одного канала, сигнал которого не используется в данной сумме. В этом случае преобразование исходного сигнала осуществляют так же, как и при условии ∑ ≤ ∑ контр 1, но амплитуду U(t) и фазу Ф(t) преобразованного цифрового сигнала вычисляют не по формулам (3), а по следующим формулам:
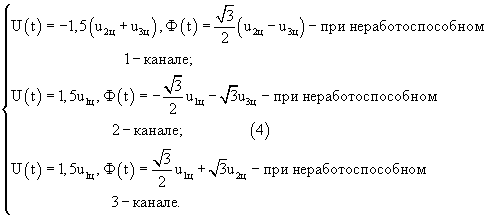
При практической реализации заявленного способа необходимо учитывать следующее.
1. Частота проверок, выполняемых с целью оценивания достоверности осуществляемых преобразований, может быть выбрана любой, например, через такт, 1 раз в секунду или 1 раз в 10 с, в зависимости от того, насколько велика степень последствий, допущенных при преобразованиях ошибок. Чем выше требования к достоверности выполняемых преобразований, тем чаще должна проводиться указанная проверка. Например, при преобразованиях сигналов в цифровую форму в РЛС, обеспечивающей посадку летательного аппарата, контроль достоверности преобразований должен осуществляться практически через такт работы РЛС, поскольку ошибка, возникшая при преобразованиях, может привести к авиакатастрофе; в тоже время в той же РЛС, обеспечивающей сопровождение летательного аппарата по маршруту, контроль достоверности преобразований можно осуществлять 1 раз в 5-10 с ее работы.
2. Величина ∑ контр 1, назначаемая исходя из допустимых ошибок преобразований, никак не влияет на последовательность вышеописанных преобразований и может быть получена в процессе испытаний конкретного преобразователя сигналов в цифровую форму того или иного назначения.
3. Величина ∑ контр 2 по физической сути не отличается от ∑ контр 1 и назначается также исходя из допустимых ошибок преобразований.
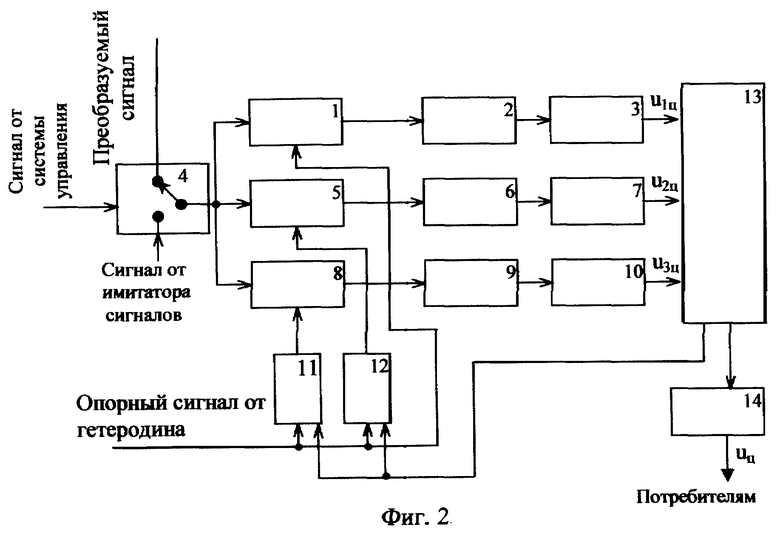
Для лучшего понимания заявленного способа как процесса выполнения действий над материальными объектами с помощью материальных средств и подтверждения возможности осуществления заявленного изобретения на фиг.2 изображена структурная схема возможного варианта построения трехканального устройства преобразования сигналов в цифровую форму, в котором реализован заявленный способ, где:
1 - первый фазовый детектор (ФД1);
2 - первый фильтр нижних частот (ФНЧ1);
3 - первый аналого-цифровой преобразователь (АЦП1);
4 - коммутатор;
5 - второй фазовый детектор (ФД2);
6 - второй фильтр нижних частот (ФНЧ2);
7 - второй аналого-цифровой преобразователь (АЦП2);
8 - третий фазовый детектор (ФД3);
9 - третий фильтр нижних частот (ФНЧ3);
10 - третий аналого-цифровой преобразователь (АЦП3);
11 - первый фазовращатель;
12 - второй фазовращатель;
13 - анализатор;
14 - вычислитель.
Функционально трехканальный преобразователь сигналов в цифровую форму состоит из коммутатора 4, трех однотипных каналов обработки, анализатора 13 и вычислителя 14. На вход коммутатора 4 подают uпр преобразуемый сигнал и uис сигнал от имитатора сигналов, а выход соединен с входами трех каналов. На управляющий вход коммутатора 4 из системы управления подают управляющий сигнал. В состав первого канала обработки входят последовательно соединенные ФД1 1, ФНЧ1 2 и АЦП1 3. В состав второго канала входят последовательно соединенные ФД2 5, ФНЧ2 6, АЦП2 7 и первый фазовращатель 12, выходом соединенный с ФД2 5. В состав третьего канала входят последовательно соединенные ФД3 8, ФНЧ3 9, АЦП3 10 и второй фазовращатель 11, выходом соединенный с ФД3 8. Па первые входы первого 12 и второго 11 фазовращателей подают опорный сигнал от гетеродина. На вторые входы первого 12 и второго 11 фазовращателей подают управляющие сигналы с выхода анализатора 13. Первый, второй и третий входы анализатора 13 соединены с выходами АЦП1 3, АЦП2 7 и АЦП3 10, соответственно, а выход - с входом вычислителя 14.
Заявленная в предлагаемом способе последовательность действий и условия их проведения подтверждаются динамикой работы приведенного преобразователя сигналов в цифровую форму, в котором реализован заявленный способ преобразования.
Преобразуемый сигнал uпр подают на первый вход коммутатора 4. Коммутатор 4 при наличии на его управляющем входе управляющего сигнала от системы управления обеспечивает передачу преобразуемого сигнала на первые входы ФД1 1, ФД2 5 и ФД3 8. С опорного гетеродина опорный сигнал вида uoп1=Yoпcos2π fot подают: на второй вход ФД1 1; на вход первого фазовращателя 12, где в результате сдвига фазы этого сигнала на 120° формируют сигнал uoп2=Yoпcos(2π fot+2π /3), который подают на второй вход ФД2 5; на вход второго фазовращателя 11, где в результате сдвига фазы этого сигнала на 240° формируют сигнал uoп3=Yoпcos(2π fot+4π /3), который подают на второй вход ФД3 8. В ФД1 1, ФД2 5 и ФД3 8 поданные на них соответствующие упомянутые сигналы перемножают, в результате чего на их выходах формируют сигналы u1, u2 и u3 (2), соответственно. С выходов ФД1 1, ФД2 5 и ФД3 8 соответствующие упомянутые сигналы подают на ФНЧ1 2, ФНЧ2 6 и ФНЧ3 9, где осуществляют фильтрацию этих сигналов от шумов и составляющих сигналов с удвоенной частотой. Отфильтрованные сигналы с выходов ФНЧ1 2, ФНЧ2 6 и ФНЧ3 9 подают на входы, соответственно, АЦП1 3, АЦП2 7 и АЦП3 10, где их преобразуют в цифровой вид, формируя их цифровые образы u1ц, u2ц, u3ц, и далее подают в вычислитель 14 транзитом через анализатор 13. В вычислителе 14 по формулам (3) вычисляют U(t) амплитуду и Ф(t) фазу преобразованного сигнала и полученный uц (4) цифровой сигнал выдают потребителям для его дальнейшей обработки.
Периодически для проверки качества проводимых преобразований, в процессе вышеописанной работы преобразователя, с управляющего входа коммутатора 4 снимают управляющий сигнал. В результате чего от первых входов ФД1 1, ФД2 5 и ФД3 8 отключают uпр преобразуемый сигнал и через коммутатор 4 подключают сигнал uис, подаваемый от имитатора сигналов, являющийся для преобразователя эталонным. С сигналом uис имитатора сигналов осуществляют всю описанную выше последовательность действий и полученные в результате их выполнения цифровые сигналы u1ц, u2ц u3ц подают в анализатор 13. В анализаторе 13 формируют сумму ∑ =u1ц, u2ц u3ц путем сложения сигналов с выходов всех трех каналов и сравнивают ее с введенным до начала работы преобразователя и запомненным ∑ контр 1 - значением контрольной суммы. При этом, если ∑ ≤ ∑ контр 1, то считают, что преобразователь работоспособен, и его работу возобновляют. Если ∑ &γτ; ∑ контр 1, то в анализаторе 13 формируют три суммы ∑ 1=u1ц+u2ц, ∑ 2=u1ц+u3ц и ∑ 3=u2ц+u3ц путем сложения сигналов с выходов соответствующих каналов и сравнивают их с введенным до начала работы преобразователя и запомненным ∑ контр 2 - другим значением контрольной суммы. Если одновременно каждая из сумм ∑ 1, ∑ 2 и ∑ 3 меньше ∑ контр 2, то констатируют факт неработоспособности преобразователя и его выключают. Если одна из сумм ∑ 1, ∑ 2 или ∑ 3 больше ∑ контр 2, то констатируют факт выхода из строя одного канала, сигнал которого не используется в данной сумме. В этом случае преобразование исходного сигнала возобновляют вышеописанным способом, но в вычислителе 14 амплитуду U(t) и фазу Ф(t) преобразованного цифрового сигнала uц вычисляют по одной из формул (5).
Таким образом, использование изобретения обеспечит более высокую достоверность преобразований аналоговых сигналов в цифровую форму, поскольку периодически осуществляется контроль качества проводимых преобразований, а также повысит надежность устройства, выполняющего указанные преобразования, так как при выходе из строя одного из его каналов имеется возможность его дальнейшей работы при работоспособных оставшихся двух других.
К принципам построения и алгоритмам функционирования фазовых детекторов, фильтров нижних частот, аналого-цифровых преобразователей и фазовращателей заявленный способ не предъявляет никаких особых требований: в качестве указанных устройств могут быть использованы любые из существующих в настоящее время. В качестве анализатора и вычислителя могут быть использованы любые цифровые вычислители. Все сказанное подтверждает практическую применимость заявленного способа.
Использованная литература
1. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Радио и связь, 1981.
2. Меркулов В.И., Перов А.И., Саблин В.Н. и др. Радиолокационные измерители дальности и скорости. T.1. - M.: Радио и связь, 1999.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОГЕРЕНТНЫЙ ПРИЕМООТВЕТЧИК ФАЗОВОЙ СИНХРОНИЗАЦИИ | 2006 |
|
RU2319931C1 |
| ФАЗОМЕТР С ГЕТЕРОДИННЫМ ПРЕОБРАЗОВАНИЕМ ЧАСТОТЫ | 2012 |
|
RU2497136C1 |
| УСТРОЙСТВО ДЛЯ УЧЕТА РЕЙСОВ АВТОСАМОСВАЛОВ | 2002 |
|
RU2244341C2 |
| УСТРОЙСТВО ДЛЯ УЧЕТА РЕЙСОВ АВТОСАМОСВАЛОВ | 2003 |
|
RU2249252C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТЫ ГАРМОНИЧЕСКОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2591742C1 |
| СПОСОБ СПЕКТРАЛЬНО-ВРЕМЕННОЙ ТРАНСФОРМАЦИИ СИГНАЛОВ | 2004 |
|
RU2256934C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭЛЕКТРИЧЕСКИХ СИГНАЛОВ И СПОСОБ ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКИХ СИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ ПРЕОБРАЗОВАТЕЛЯ | 2000 |
|
RU2183902C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА РЕФЛЕКСНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 1990 |
|
RU2007877C1 |
| ПРОТИВОУГОННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2248896C1 |
| СПОСОБ ПЕРЕДАЧИ ДИСКРЕТНОЙ ДВОИЧНОЙ ИНФОРМАЦИИ ФАЗОМОДУЛИРОВАННЫМИ СИГНАЛАМИ В МНОГОКАНАЛЬНЫХ СИСТЕМАХ РАДИОСВЯЗИ С ЧАСТОТНЫМ УПЛОТНЕНИЕМ ФАЗОМОДУЛИРОВАННЫХ КАНАЛЬНЫХ ПОДНЕСУЩИХ | 2016 |
|
RU2647633C2 |
Изобретение относится к радиотехнике и может быть использовано в радиолокационных системах, использующих цифровую обработку сигналов. Достигаемый технический результат - обеспечение более высокой достоверности преобразований аналоговых сигналов в цифровую форму, повышение надежности. Способ преобразования сигнала в цифровую форму основан на разделении преобразуемого сигнала по разным каналам, обработке и перемножении его в этих каналах с опорными сигналами равной амплитуды со сдвинутыми относительно друг друга фазами и формировании тем самым сигналов U1, U2 и U3, которые в соответствующем канале фильтруют, преобразуют в цифровой вид, формируя тем самым цифровые образы сигналов U1ц, U2ц и U3ц, и формировании цифрового сигнала Uц=U(t)cos[Ф(t)], для которого амплитуду U(t) и фазу Ф(t) определяют по амплитудам и фазам сигналов U1, U2 и U3, как элементам трехфазной системы, периодически упомянутые сигналы U1ц, U2ц и U3ц получают упомянутым выше образом, используя вместо преобразуемого сигнала эталонный сигнал, далее U1ц, U2ц и U3ц складывают и полученную сумму сравнивают с контрольной суммой и по полученному результату судят о допустимости ошибок и необходимости возобновления или прекращения процесса преобразований. 2 ил.
Способ преобразования сигнала в цифровую форму, основанный на разделении преобразуемого сигнала по разным каналам обработки и перемножении его в этих каналах с опорными сигналами равной амплитуды со сдвинутыми относительно друг друга фазами, отличающийся тем, что преобразуемый сигнал вида uпр=Ycсos[2πfсt+ϕс(t)] разделяют на три канала обработки, в первом канале его перемножают с опорным сигналом вида uоп1=Yопcos2πfot, во втором канале - с опорным сигналом вида uоп2=Yопcos(2πfot+2π/3), в третьем канале - с опорным сигналом вида uоп3=Yoпcos(2πfot+4π/3), тем самым формируют сигналы
в первом, втором и третьем каналах соответственно,
где Yc, Yоп - амплитуды преобразуемого и опорного сигналов соответственно, ϕс(t) - фаза преобразуемого сигнала, fo - частота опорного сигнала, равная fc - частота преобразуемого сигнала, t - текущее время, Y(t), ϕ1(t), ϕ2(t), ϕ3(t) - амплитуда и фазы сигналов, сформированных в первом, втором и третьем каналах соответственно, сигналы u1, u2, u3 (1) в соответствующем канале фильтруют, преобразуют в цифровой вид, формируя тем самым u1ц, u2ц, u3ц - цифровые образы сигналов u1, u2, u3, и формируют цифровой сигнал uц=U(t)cos[Ф(t)], для которого амплитуду U(t) и фазу Ф(t) определяют по амплитудам и фазам сигналов u1, u2 и u2 как элементам трехфазной системы Yej0+Yej2π/3+Yej4π/3, в которой Y, еj0, ej2π/3, еj4π/3 - амплитуда и базисные векторы соответственно, причем периодически преобразуемый сигнал uпр отключают от входов всех каналов, подключают к каждому каналу эталонный сигнал, перемножают его в каждом из каналов с соответствующим опорным сигналом, формируют сигналы u1, u2, u3 (1), фильтруют их и преобразуют в цифровой вид u1ц, u2ц, u3ц, далее сигналы u1ц, u2ц и u3ц складывают и полученную сумму Σ=u1ц+u2ц+u3ц сравнивают с Σконтр 1 - контрольной суммой, при этом, если Σ≤Σконтр 1, то считают, что преобразования выполняют с допустимыми ошибками, и описанный выше процесс преобразований возобновляют, если Σ>Σконтр 1, то считают, что преобразования выполняют с недопустимыми ошибками, и процесс преобразований прекращают.
| ШИРМАН Я.Д., МАНЖОС В.Н | |||
| Теория и техника обработки радиолокационной информации на фоне помех | |||
| - М.: Радио и связь, 1981, с.146 и 147 | |||
| СПОСОБ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ УЗКОПОЛОСНЫХ СИГНАЛОВ | 1992 |
|
RU2036558C1 |
| Устройство для транспортирования деталей | 1975 |
|
SU601201A1 |
| ЕР 0762656 А2, 12.03.1997 | |||
| US 6188346 B1, 13.02.2001 | |||
| US 5563596 А, 08.10.1996. | |||

