Изобретение относится к измерительной технике и может использоваться в радиотехнике, метрологии и других отраслях промышленности для прецизионного измерения разности фаз пары сигналов и ее изменения во времени.
Задача прецизионного измерения разности фаз пары сигналов стоит при создании лазерных и радиочастотных измерителей вибраций и перемещений, где малые изменения фазы несут информацию об исследуемых процессах. Сигнал на входе фазометра - гармонический. Разность фаз Δφ(t) изменяется во времени таким образом, что содержит большую низкочастотную компоненту φнч(t) и малую высокочастотную компоненту δφ(t). В некоторых задачах требуется измерение только малой высокочастотной компоненты δφ(t) в условиях большой низкочастотной компоненты φнч(t). В других задачах требуется измерение только малой низкочастотной компоненты φнч(t) на фоне большой высокочастотной компоненты δφ(t). Иногда требуется измерение всех компонент разности фаз.
Известны высокочастотные широкополосные фазометры различных конструкций, измеряющие разность фаз двух гармонических сигналов.
Например, известен фазометр, включающий: два аналого-цифровых преобразователя (АЦП); времязадающее средство, средство сбора и обработки данных [Патент РФ №2225012, МПК G01R 25/00, H03D 13/00].
Этот фазометр работает следующим образом. Входные сигналы U1 и U2 высокой частоты ω1 имеют вид:

и

где А1 и А2 - амплитуда, которая меняется существенно медленней, чем U1(t) и U2(t), ω1 - одинаковая несущая частота сигналов, φ1 и φ2 - фазы этих сигналов.
Требуется измерить разность фаз Δφ=φ2-φ1.
С этой целью входные сигналы U1 и U2 поступают на два идентичных аналого-цифровых преобразователя, АЦП1 и АЦП2. Эти АЦП в моменты времени tn, задаваемые времязадающим устройством, формируют цифровые отсчеты значений входных сигналов с частотой следования ω0. Время преобразования АЦП существенно меньше, чем период поступающих на них сигналов. Частота взятия отчетов ω0 с некоторым приближением превышает в М раз частоту сигналов (1) и (2), т.е. ω0≈Мω1, где М - небольшое целое число, например, М=3. Если получаемую последовательность отсчетов распределить на М серий отсчетов, например, при М=3, три серии отсчетов с номерами (1, 4, 7, 10); (2, 5, 8, 11) и (3,6, 9, 12,), то получаемые отсчеты сигнала (1) могут трактоваться как отсчеты разностной частоты между частотой этого сигнала (1) и частотой преобразования ω0, задаваемой времязадающим устройством. Сказанное справедливо и по отношению к отсчетам сигнала (2). Между каждой серией отчетов имеет место сдвиг фаз на величину Δϕ=2π/М. Дальнейшая обработка этих отсчетов позволяет раздельно вычислять разность фаз между сигналами U1 и U2, с одной стороны, и тактовым сигналом времязадающего устройства, с другой стороны, метод этих вычислений детально описан в патенте, описывающем это устройство.
При нестрогом равенстве ω0 и Мω1 каждая из вычисленных фаз с течением времени в среднем линейно нарастает или убывает, но разность этих фаз и в этом случае в среднем остается постоянной. Конкретное же значение этой разности фаз Δφ=φ2-φ1 в каждый момент времени все время меняется, и его значение может быть определено в режиме реального времени за счет достаточного быстродействия цифрового устройства обработки. Таким путем достигается измерение разности фаз в полосе частот до 5-10 кГц. Все необходимые арифметические действия для вычисления разности фаз осуществляются устройством сбора и обработки сигналов в режиме реального времени. Этот метод измерения фаз позволяет точно вычислить и устранить из результата обработки в отдельности сдвиг нуля АЦП, амплитудную модуляцию входных сигналов (т.е. медленные изменения величин А1 и А2), а также позволяет получать разность фаз Δφ в виде непрерывной функции времени. Эта функция получается в виде цифровых значений этой величины, что позволяет эффективно подавлять те компоненты, которые лежат вне полосы частот, представляющей интерес.
Недостаток этого фазометра состоит в том, что несущая частота ω1 входных сигналов (1) и (2) должна быть не слишком высокой, в М раз меньше, чем частота ω0 преобразования используемых АЦП. Если, например, частота преобразований АЦП ω0 равна 120 КГц, то при М=3, с учетом ω0≈Мω1 частота ω1 не может быть выше 40 кГц.
Таким образом, данный фазометр не позволяет измерять разность фаз сигналов, имеющих высокую несущую частоту.
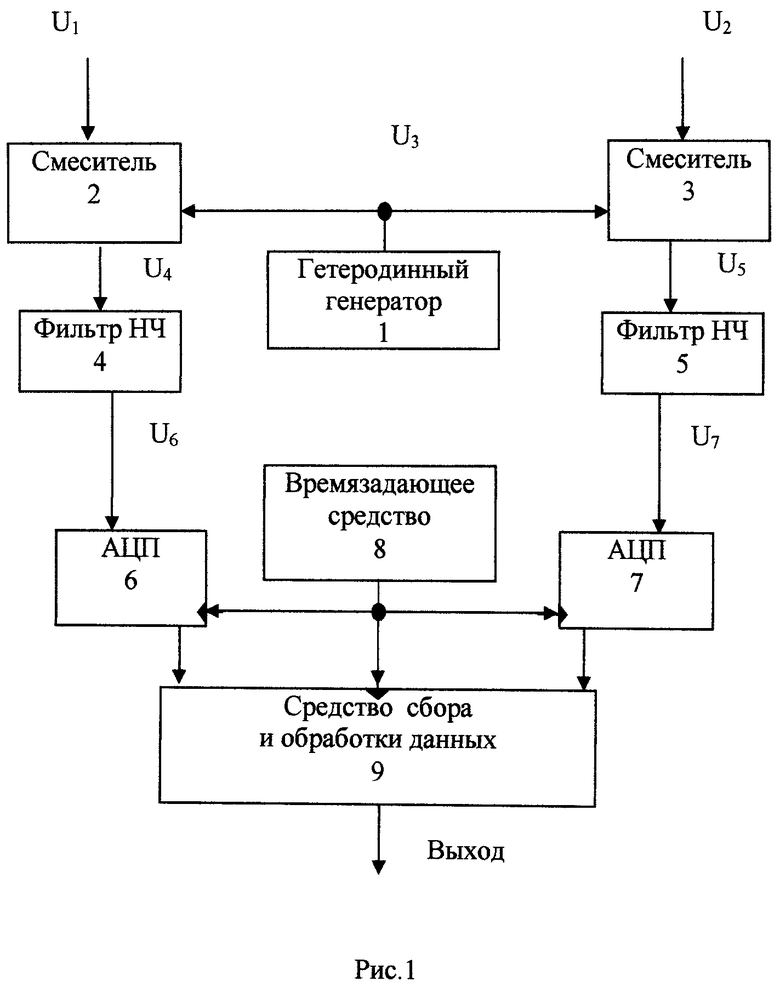
Наиболее близким к заявляемому устройству является фазометр, включающий: два смесителя, два фильтра низких частот, гетеродинный генератор, два аналого-цифровых преобразователя, времязадающее средство и средство сбора и обработки данных [Патент РФ №2225012, МПК G01R 25/00, H03D 13/00].
Схема этого фазометра показана на рис.1, где 1 - гетеродинный генератор, 2 - первый смеситель, 3 - второй смеситель, 4 - первый фильтр НЧ, 5 - второй фильтр НЧ, 6 - первый аналого-цифровой преобразователь (АЦП), 7 - второй (АЦП), 8 - времязадающее средство, 9 - средство сбора и обработки данных.
Этот фазометр работает следующим образом.
Сигналы образцовой частоты с выхода времязадающего устройства поступают на тактовые входы обоих АЦП и средства сбора и обработки данных. Это обеспечивает синхронность работы этих устройств. Для наглядности тактовые входы помечены двойными стрелками.
Сигналы вида (1) и (2) поступают на смесители 2 и 3. На каждом смесителе эти сигналы умножаются на сигнал, формируемый гетеродинным генератором 1

В результате на выходе смесителей формируются сигналы этих произведений:


В соответствии с правилами тригонометрических преобразований, каждый из этих сигналов может быть представлен, как сумма гармонических компонент с разностной и с суммарной несущими частотами. Включенные на выходах фильтры низких частот пропускают только низкочастотные компоненты. Поэтому с выходов фильтров на входы (АЦП) 6 и 7 поступают сигналы разностной частоты:


Эти сигналы можно записать в другой форме:


Здесь Ci=0,5AiB, ω2=ω1-ω0. Сигналы (8) и (9) идентичны по форме сигналам (1) и (2), но отличаются меньшими значениями несущей частоты ω2<<ω1, что обеспечивается соответствующим выбором частоты гетеродинного генератора ω0. Дальнейшая часть фазометра, образует низкочастотный фазометр, полностью идентичный фазометру, описанному выше.
Например, если несущая частота исходного сигнала ω1=80 МГц, то выбором частоты гетеродинного генератора ω0=80,01 МГц или ω0=79,99 МГц можно обеспечить разностную частоту ω2=ω1-ω0=±0,01 МГц, т.е. 10 кГц. При этом условии дальнейшее измерение разности фаз сигналов (8) и (9) может быть обеспечено с помощью АЦП, частота преобразований которого ω2 составляет 30 кГц. Таким образом, этот фазометр позволяет осуществлять измерения разности фаз сигналов, имеющих высокочастотную несущую частоту ω1.
Этот фазометр является ближайшим аналогом предлагаемого и принят за прототип изобретения.
К его недостаткам относятся значительные фазовые шумы, вносимые каскадом понижения частоты, который образуется смесителями, фильтрами и гетеродинным генератором. Амплитудная модуляция, присущая во входных сигналах, при таком преобразовании трансформируется в паразитную фазовую модуляцию, которую невозможно выделить и подавить при последующей цифровой обработке. Кроме того, собственные шумы смесителей также приводят к повышению шумов на их выходе, которые снижают точность фазометра в целом. Таким образом, прототип обладает недостаточно высокой точностью.
Задачей, на решение которой направлено изобретение, является повышение точности фазометра при измерении разности фаз сигналов, имеющих высокочастотную несущую частоту.
Поставленная задача решается тем, что предлагается фазометр с гетеродинным преобразованием частоты, содержащий первый вход для первого сигнала, снабженный первым аналого-цифровым преобразователем, и второй вход для второго сигнала, снабженный вторым аналого-цифровым преобразователем, идентичным первому, времязадающее средство и средство сбора и обработки данных, при этом времязадающее средство своими выходами связно с входами каждого аналого-цифрового преобразователя и средства сбора и обработки данных, который содержит первый канал обработки сигналов и второй канал обработки сигналов, причем первый аналого-цифровой преобразователь соединен своим выходом с входом первого канала обработки сигналов, а второй аналого-цифровой преобразователь соединен своим выходом с входом второго канала обработки сигналов, при этом каждый канал обработки сигналов содержит четыре последовательно установленных регистра, каждый из которых соединен своим входом с выходом времязадающего средства, пару вычитателей и пару сумматоров с коэффициентами, причем первый вычитатель соединен своими входами с выходами первого и третьего регистров и времязадающего средства, а своими выходами - с входами первого и второго сумматоров с коэффициентами, при этом второй вычитатель соединен своими входами с выходами второго и четвертого регистров и времязадающего средства, а своими выходами - с входами первого и второго сумматоров с коэффициентами, выходы первого и второго сумматоров с коэффициентами соединены с входами средства сбора и обработки данных, причем входом каждого канала обработки сигналов является вход первого регистра, а его выходами являются выходы сумматоров с коэффициентами.
Времязадающим средством может служить образцовый генератор, который также называют «таймер».
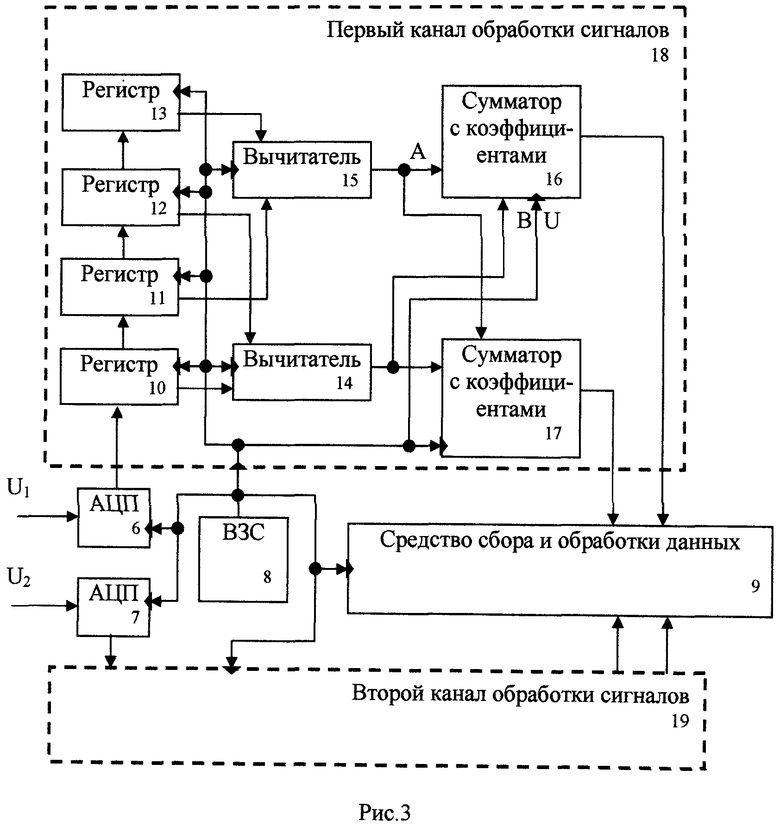
Схема предлагаемого устройства показана на рис.2, где:
6 - первый АЦП, 7 - второй АЦП, 8 - времязадающее средство (таймер), 9 - средство сбора и обработки данных; 10 первый регистр, 11 - второй регистр, 12 - третий регистр, 13 - четвертый регистр, 14 - первый вычитатель, 15 - второй вычитатель, 16 - первый сумматор с коэффициентами, 17 - второй сумматор с коэффициентами, 18 - первый канал обработки сигналов, 19 - второй канал обработки сигналов.
Повышение точности достигается применением двух каналов обработки сигналов, содержащих регистры и сумматоры, и использованием высокоскоростных АЦП, что позволяет преобразовывать высокочастотные сигналы, после чего в четыре раза понизить частоту следования отсчетов с сохранением информативности этого сигнала и с устранением сдвига нуля и амплитудной модуляции. В итоге снижается требование быстродействия к средству сбора и обработки данных при сохранении всех функций, необходимых для достижения высокой точности. Принцип действия этого устройства основан на том, что наиболее быстро могут исполняться операции сложения, вычитания чисел и сдвига. Сдвиг двоичного кода в регистре эквивалентен умножению или делению его на целое число, являющееся степенью двойки, например 2, 4, 8 и т.д. В устройстве не требуется умножения числа на переменный код, соответствующий произвольному числу (например, значению некоторой функции, формируемому программно), которое требует более существенных затрат времени или более сложного специального аппаратного обеспечения.
Предлагаемый фазометр работает следующим образом.
Сигналы образцовой частоты с выхода времязадающего устройства поступают на тактовые входы обоих АЦП и средства сбора и обработки данных. Это обеспечивает синхронность работы этих устройств. Для наглядности все тактовые входы помечены двойными стрелками.
Входные сигналы имеют вид, близкий к синусоидальному сигналу заранее приближенно известной частоты f1 вида (1) и (2), где ω1=2 πf1, но содержат амплитудную модуляцию, а также аддитивные и мультипликативные шумы, смещение нулевого уровня.
Например, первый сигнал имеет вид:
U1(t)=a0sin(2πf1t+φ1)+n(t),
где a0 - амплитуда, f1 - частота, φ1 - фаза, n(t) - шум.
Соответственно, второй сигнал имеет вид:
U2(t)=b0sin(2πf2t+φ2)+m(t),
с аналогичными обозначениями: b0 - амплитуда, f2 - частота, φ2 - фаза, m(t) - шум.
Фазометр должен измерять разность фаз этих сигналов Δφ=φ2-φ1, с наименьшим вкладом в результат измерения всех мешающих факторов, таких, как ВЧ и НЧ аддитивный шум n(t) и m(t) амплитудная модуляция несущей частоты (изменение величин а0 и b0 во времени, то есть мультипликативный шум), смещение нулевого уровня.
Времязадающее устройство 8 формирует тактирующие сигналы U0 с точно известной частотой f0≈4f1, подаваемые на оба АЦП и на средство сбора и обработки данных. Эти сигналы также могут быть поданы на тактовые входы всех остальных элементов для обеспечения лучшей синхронизации их действий, как показано на рис.3. На этом рисунке все тактовые входы всех элементов отмечены двойными стрелками, и они соединены с выходом времязадающего устройства 8.
Каждый из двух АЦП преобразует аналоговые входные сигналы в цифровые отсчеты с частотой преобразования f0, являющиеся численным значением величины входных аналоговых сигналов в моменты, соответствующие поступлению тактовых импульсов от времязадающего устройства.
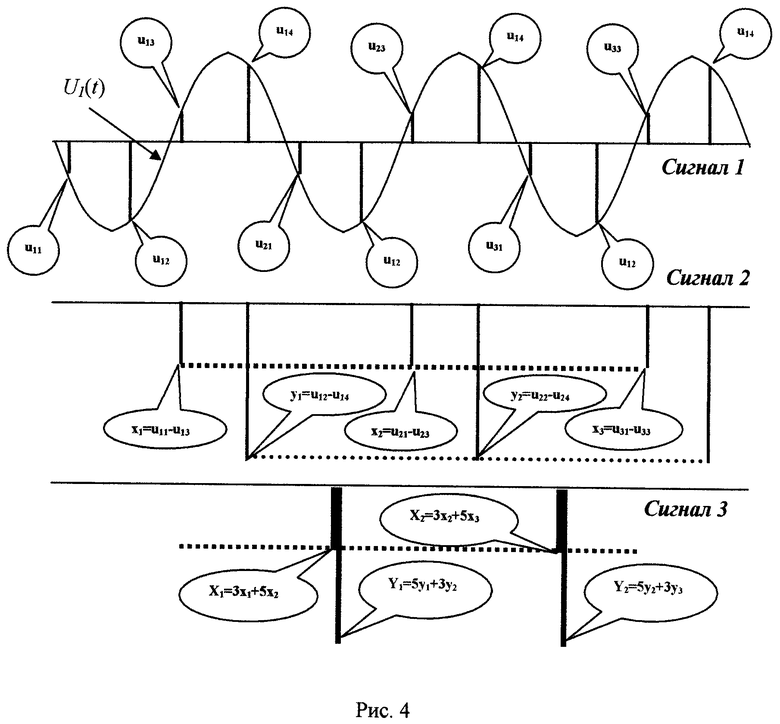
Каждый из каналов обработки сигналов 18 и 19 преобразуют последовательности этих отсчетов, поступающих от АЦП 6 и 7 в новые последовательности отсчетов, соответствующие когерентной Х и квадратурной Y компонентам разностной частоты Δf=f1-f0. При этом фаза когерентной компоненты Х равна разности фаз входного сигнала U1 (или U2) и опорного сигнала U0. Фаза квадратурной компоненты Y отличается на π/2 от фазы когерентной компоненты. Частота следования отсчетов когерентной и квадратурной компонент на выходе каналов обработки равна fT=f0/4. Пара когерентной и квадратурной компонент [X, Y] называется аналитическим сигналом, для вычисления его фазы имеются простые соотношения. Средство сбора и обработки данных 9 при необходимости дополнительно фильтрует эти отсчеты применением цифрового потокового фильтра (программного или аппаратного), который может входить в состав этого средства. После такой фильтрации, или без нее, средство сбора и обработки данных вычисляет фазы каждого из аналитических сигналов по известному соотношению. Каждый из каналов обработки вычисляет и формирует первую пару {X1, Y1} по первым восьми отсчетам входного сигнала, и далее вычисляет и формирует каждую последующую пару {Xi, Yi} по каждым новым четырем отсчетам входного сигнала. Эпюры этих сигналов показаны на рис.3, где U1(t) - входной сигнал первого канала (сигнал 1 непрерывный на входе АЦП 6), uij - отсчеты АЦП первого канала (сигнал 1 дискретный на выходе АЦП 6), xij и yij - результаты вычислений разностей отсчетов АЦП первого канала (сигнал 2 на выходах вычитателей 13 и 14).
Соотношения для вычисления этих пар (сигнал 3 на рис.3, получаемый на выходах сумматоров с коэффициентами 16 и 17) имеют следующий из первых восьми отсчетов вид:


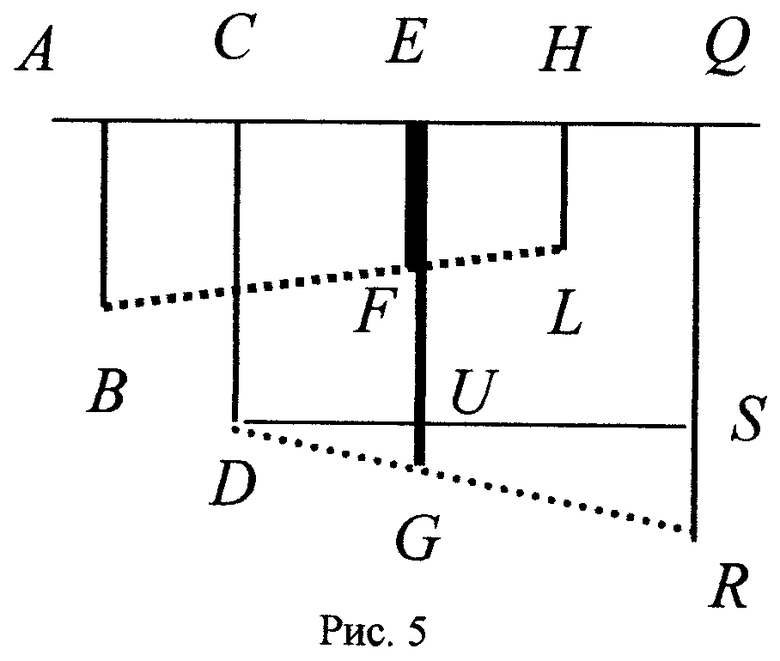
Эти соотношения получены из геометрических расчетов, которые иллюстрируются фигурами, приведенными на рис.5. На этом рисунке отрезок АВ представляет отсчет x1, отрезок HL представляет отсчет х2, отрезок CD представляет отсчет y1, отрезок QR представляет отсчет у2. Расстояния по времени между этими отсчетами представлено сторонами соответствующих трапеций: отрезок АН соответствует длительности между отсчетами х1 и x2, отрезок CQ соответствует длительности между отсчетами y1 и y2, момент времени на середине интервала между отсчетами x1 и y2 отмечен точкой Е. К этому моменту необходимо привести все имеющиеся отсчеты, из четырех отсчетов, взятых в разное время, необходимо вычислить виртуальный отсчет когерентной и квадратурной компонент, которые были бы взяты в момент, соответствующий точке Е. Отсчеты в точках А и Н соответствуют значениям когерентной компоненты, но не в требуемый момент времени. Отсчеты в точках С и Q соответствуют значениям квадратурной компоненты, то также не в требуемый момент времени. В предположении, что когерентная и квадратурная компоненты меняются на небольшом интервале времени практически линейно, методом интерполяции можно вычислить значения этих отсчетов в момент, обозначенный точкой Е. Для этого достаточно рассмотреть соответствующие трапеции или построить дополнительные треугольники. Из условий формирования отсчетов известны следующие соотношения: АЕ : ЕН=5:3; СЕ : EQ=3:5.
Из этого следует, что EF=(3 АЕ+5 HL)/8; EG=(5 CD+3 QR)/8.
Действительно, например, рассмотрев подобные треугольники SDR и UDG, с учетом DU=3 DS/8, получим GU=3 RS/8.
EG=CD+GU=CD+3(QR-CD)/8=(5 CD+3 QR)/8.
Пренебрегая общим для всех соотношений делителем 1/8 (поскольку введение общего масштаба не мешает измерению фаз сигналов), мы получим соотношения (10) и (11).
При получении новых четырех отсчетов эти в соотношениях (10) и (11) индексы левой части увеличиваются на единицу, а индексы правой части увеличиваются на четыре единицы:


И так далее. Структура каждого из каналов обработки данных соответствует этим вычислениям и содержит для этой цели четыре регистра сдвига, два вычитателя и два сумматора с коэффициентами.
Обоснование для этих соотношений следующее.
Рассмотрим четыре последовательных отсчета сигнала U1, взятые с частотой f0, в 4 раза превышающей среднюю частоту этого сигнала f1. В этом случае мы будем получать серию отсчетов, которые сдвинуты по фазе приблизительно на величину четверти периода от частоты входного сигнала.
Разобьем эту последовательность на четыре различные последовательности, пронумеровав эти отсчеты последовательно следующим образом: [u11, u12, u13, u12, u21, u22, u23, u22…]. Тогда любая прореженная в 4 раза последовательность [un1, un2…] является последовательностью значений сигнала разностной частоты между частотой входного сигнала U1 и новой тактовой частоты. Новая тактовая частота равна опорной частоте, деленной на четыре fT=f0/4. Эти последовательности имеют сдвиг фазы тактовой частоты fT величину (n-1)Т/4, где Т=1/fT.
Сдвиг на половину периода эквивалентен инвертированию основной гармоники в силу соотношения cos(ωt+π)=-cos(ωt). Поэтому для случая постоянной частоты и амплитуды входного сигнала и строгого равенства частоты входного сигнала тактовой частоте fT (четвертой части от опорной частоты) справедливо было бы соотношение un(m+2)=-unm. Следовательно, попарно вычитая получаемый отсчеты, отстоящие на два номера, будем получать их удвоенные значения, тогда как сдвиг нуля АЦП и смещение нуля входного сигнала при этом будет полностью исключаться. Таким образом, из последовательности N отсчетов мы можем сформировать последовательность N/2 отсчетов, в которых будет полностью исключен сдвиг нуля, а именно:

Введем новые обозначения, обозначая новые отсчеты поочередно xk и yk:


и так далее.
В этом соотношении каждый полученный отсчет внес одинаковый вклад в результат и только по одному разу. При следующем усреднении следует привести эти отсчеты к общим моментам времени. Каждый отсчет из соотношений (15), (16) соответствует удвоенному среднему значению между отсчетом разностной частоты в некоторый момент и инверсией отсчета этой же разностной частоты со сдвигом на половину периода и с инверсией (которая нейтрализует этот сдвиг). Удвоение при фильтрации вполне допустимо, так как удваивается последовательность всех отсчетом, и это не окажет влияния на точность измерения фазы, зато упростит вычисления.
Наиболее корректная точка привязки этого отсчета находится на середине интервала между этими отсчетами, то есть все новые отсчеты должны иметь одинаковую задержку на половину периода, поскольку, если задержка для всех отсчетов одинакова, ей можно пренебречь.
Между отсчетами xk и yk имеется сдвиг во времени на величину четверти периода разностной частоты, а между последующими отсчетами каждой из этих последовательностей (только xk или только yk) - на полный период разностной частоты. Середина на временной шкале между отсчетами х1, y1, x2, y2 отстоит от крайних отсчетов х1 и y2 на 2,5 четверти периода, а от внутренних отсчетом y1 и х2 - на 1,5 периода. Поэтому для приведения этих отсчетов к единой точке во времени следует использовать соответствующие весовые коэффициенты, обратные удалению отсчетов от этой точки, равные 3/8 и 5/8. Поскольку для вычисления фазы значение имеют не абсолютные, а относительные значения отсчетов входных сигналов, изменение масштаба при цифровой фильтрации допустимо, поэтому можно рекомендовать более простые весовые коэффициенты, 3 и 8. Исходя из этого на следующем шаге фильтрации вычисление новых отсчетов можно рекомендовать по соотношению:


и так далее.
Каждый последовательный отсчет в итоге вносит свой вклад в последовательность с коэффициентом 8, что хорошо согласуется с тем, что весовые коэффициенты приняты в 8 раз больше, чем следовало бы для точного вычисления среднего значения. Таким образом, на этом этапе фильтрации вводится коэффициент усиления отсчетов в 8 раз.
На рис.4 показаны эпюры сигналов, иллюстрирующие процедуру преобразования отсчетов, приводящую к их меньшему количеству, усреднению и приведению к единой точке во времени.
Далее последовательности {Xi, Yi} трактуются как когерентная и квадратурная компоненты аналитического сигнала, то есть проекции вектора на оси Х и Y. По этим проекциям легко могут быть вычислены раздельно амплитуда и фаза, а именно:


Здесь atan2(X,Y) - стандартная функция, равная arctg(KCY) для |Y|<|X| и arcctg(X/Y) для |Y|>|X|. Эта функция определена на всем множестве {Xi, Yi}. Если амплитуда сигнала не требуется, то вычислять достаточно только фазу по соотношению (20). Это соотношение позволяет устранить влияние амплитудной модуляции на результат вычисления фазы.
Если получаемые на этой стадии отсчеты следуют слишком быстро, для того, чтобы вычислять непосредственно фазы входных сигналов и их разность, то можно осуществить несколько этапов дополнительной фильтрации на цифровых конвейерных фильтрах, которые могут быть реализованы аппаратно на входе средства сбора и обработки сигналов или программно в его составе. Если же аппаратная часть может осуществить в реальном времени указанные вычислительные процедуры, и если требуется широкий спектр регистрации фазовых девиаций, то такая фильтрация не требуется.
Также такая фильтрация программно может быть применена при вторичной (окончательной) обработке данных.
Все устройство может быть полностью реализовано на сигнальном процессоре, например, на процессоре фирмы Altera [NCO MegaCore Function. User Guide. http://www.altera.com/literature/ug/ug_nco.pdf). использующим АЦП типа ADC6645, имеющим 14 разрядов и работающим на тактовой частоте 100 МГц.
Средством сбора и обработки данных может служить, например, микроконтроллер или сигнальный процессор, содержащий решающее устройство (процессор), оперативную память (для хранения данных и результатов) и постоянную память (для хранения программ и констант) в стандартной конфигурации.
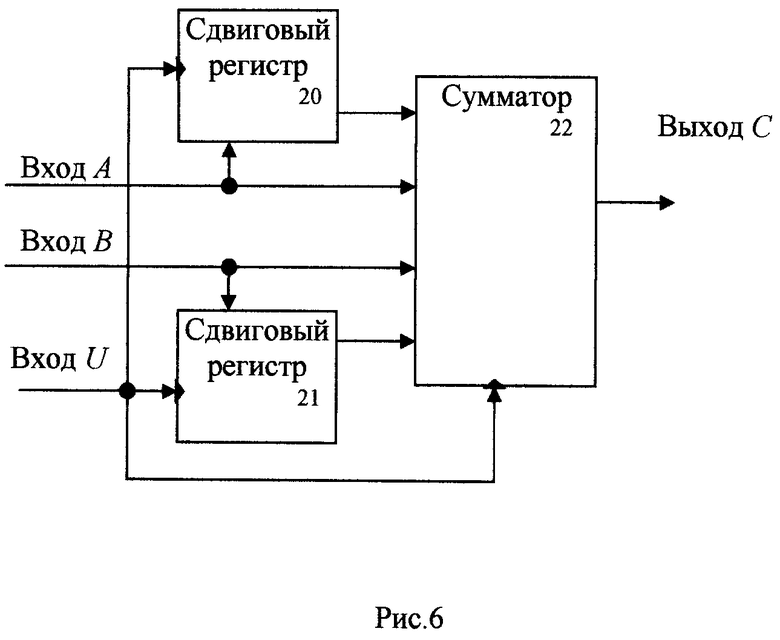
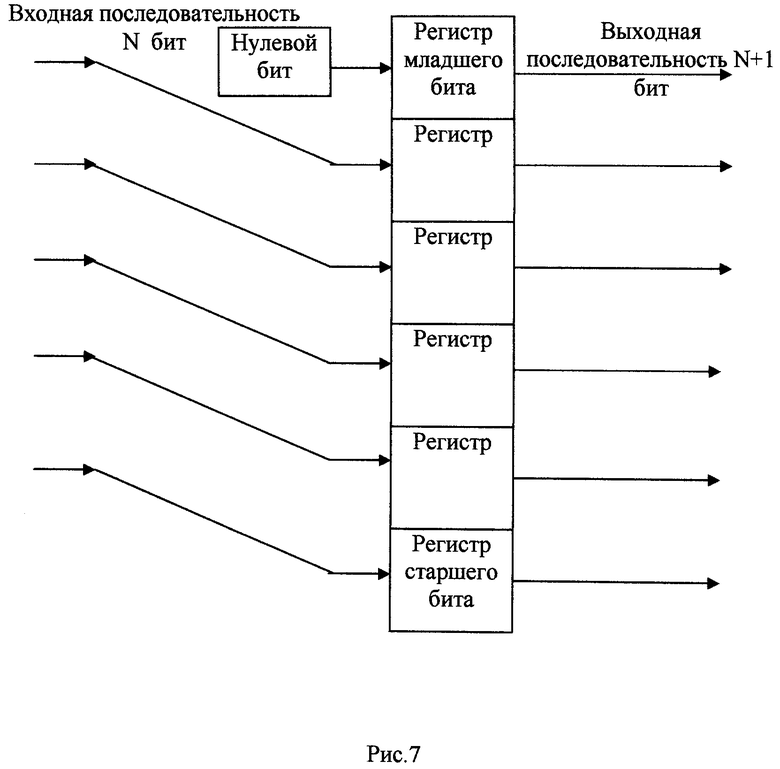
Сумматор с коэффициентом 16, 17 может быть, например, реализован по схеме, как показано на рис.6., где: 20, 21 - сдвиговый регистр, 22 - сумматор, причем тактирующий сигнал U поступает на тактовые входы сдвиговых регистров 20 и 21 и сумматора 22. Сдвигом двоичного кода на один разряд влево осуществляется умножение его на коэффициент 2, а сдвигом на два разряда - умножение на коэффициент 4. Поэтому сложение сдвинутого кода с исходным позволяет получить результат умножения исходного кода на 3 или на 5 в зависимости от того, на один или на два разряда сдвинут этот код в регистре сдвига. Например, если на регистре 20 сдвиг осуществлен на один разряд, а на регистре 21 - на два разряда, тогда на выходе С будет осуществлено вычисление суммы кодов со входа А с коэффициентом 3 и со входа В с коэффициентом 5, что и требуется для вычисления соотношений вида (17) и (18). Величина разрядов, на которые осуществляются сдвиги, определяется программированием этих регистров или путем соответствующего монтажа, например, на рис.7 показано удвоение двоичного числа путем сдвига на один бит вверх, что осуществляется смещением соответствующих шин при монтаже и добавлением нулевого бита на младшую позицию. Эта процедура также может быть выполнена программно.
Такое выполнение фазометра обеспечивает повышение точности фазометра при измерении разности фаз сигналов, имеющих высокочастотную несущую частоту.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФАЗОМЕТР | 2015 |
|
RU2582625C1 |
| ФАЗОМЕТР С ГЕТЕРОДИННЫМ ПРЕОБРАЗОВАНИЕМ ЧАСТОТЫ | 2013 |
|
RU2551837C2 |
| ФАЗОМЕТР С ГЕТЕРОДИННЫМ ПРЕОБРАЗОВАНИЕМ ЧАСТОТЫ | 2010 |
|
RU2470312C2 |
| ФАЗОМЕТР С ГЕТЕРОДИННЫМ ПРЕОБРАЗОВАНИЕМ ЧАСТОТЫ | 2002 |
|
RU2225012C2 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ СДВИГА ФАЗ ГАРМОНИЧЕСКИХ СИГНАЛОВ | 2020 |
|
RU2751020C1 |
| Цифровой фазовый детектор | 2018 |
|
RU2723445C2 |
| ЦИФРОВОЙ НЕКОГЕРЕНТНЫЙ ДЕМОДУЛЯТОР ЧЕТЫРЕХПОЗИЦИОННЫХ СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2017 |
|
RU2649782C1 |
| ФАЗОРАЗНОСТНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА С ШИРОКОПОЛОСНЫМ СИГНАЛОМ | 2015 |
|
RU2602506C1 |
| ЦИФРОВОЙ КОГЕРЕНТНЫЙ ДЕМОДУЛЯТОР СИГНАЛОВ С ДВОИЧНОЙ ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2016 |
|
RU2633183C1 |
| Устройство тактовой синхронизации приемника дискретной информации | 1985 |
|
SU1277411A1 |
Изобретение относится к измерительной технике и может использоваться в радиотехнике, метрологии и других отраслях промышленности для прецизионного измерения разности фаз пары сигналов и ее изменения во времени. Фазометр содержит первый вход для первого сигнала, снабженный первым аналого-цифровым преобразователем, и второй вход для второго сигнала, снабженный вторым аналого-цифровым преобразователем, идентичным первому, времязадающее средство и средство сбора и обработки данных, при этом времязадающее средство своим выходом связано с входами каждого аналого-цифрового преобразователя и средства сбора и обработки данных, также он содержит идентичные первый и второй каналы обработки сигналов, каждый из которых содержит четыре последовательно включенных регистра, два вычитателя и два сумматора с коэффициентами, вход первого из регистров каждого канала является входом канала и соединен с выходом соответствующего аналого-цифрового преобразователя, выходы обоих сумматоров с коэффициентами являются выходами каналов и соединены с входами средства сбора и обработки данных, а их входы соединены с выходами каждого вычитателя своего канала, входы первых вычитателей каждого канала соединены с выходами первого и третьего регистров этого канала, а входы вторых вычитателей - с выходами вторых и четвертых регистров этого канала. Технический результат заключается в повышении точности фазометра при измерении разности фаз сигналов, имеющих высокочастотную несущую частоту. 1 з.п. ф-лы, 7 ил.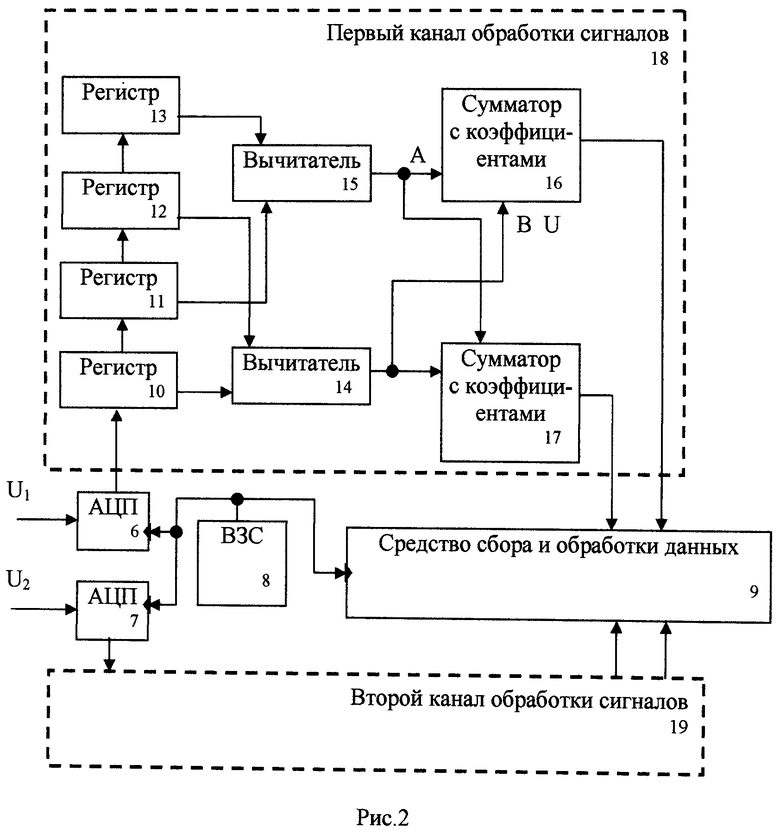
1. Фазометр с гетеродинным преобразованием частоты, содержащий первый вход для первого сигнала, снабженный первым аналого-цифровым преобразователем, и второй вход для второго сигнала, снабженный вторым аналого-цифровым преобразователем, идентичным первому, времязадающее средство и средство сбора и обработки данных, при этом времязадающее средство своим выходом связано с входами каждого аналого-цифрового преобразователя и средства сбора и обработки данных, отличающийся тем, что он содержит идентичные первый и второй каналы обработки сигналов, каждый из которых содержит четыре последовательно включенных регистра, два вычитателя и два сумматора с коэффициентами, вход первого из регистров каждого канала является входом канала и соединен с выходом соответствующего аналого-цифрового преобразователя, выходы обоих сумматоров с коэффициентами являются выходами каналов и соединены с входами средства сбора и обработки данных, а их входы соединены с выходами каждого вычитателя своего канала, входы первых вычитателей каждого канала соединены с выходами первого и третьего регистров этого канала, а входы вторых вычитателей - с выходами вторых и четвертых регистров этого канала.
2. Фазометр по п.1, отличающийся тем, что тактовые входы всех регистров, вычитателей и сумматоров с коэффициентами каждого канала соединены с выходом времязадающего устройства.
| ФАЗОМЕТР С ГЕТЕРОДИННЫМ ПРЕОБРАЗОВАНИЕМ ЧАСТОТЫ | 2002 |
|
RU2225012C2 |
| US 4901244 A1, 13.02.1990 | |||
| СПОСОБ ИЗМЕРЕНИЯ ФАЗОВОГО СДВИГА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2099721C1 |
| ИЗМЕРИТЕЛЬ ХАРАКТЕРИСТИК ФАЗОВЫХ ФЛУКТУАЦИЙ | 1992 |
|
RU2041469C1 |
| DE 4124005 A1, 21.01.1993. | |||

