Настоящее изобретение относится к устройству для разборки стопы плоских предметов, в частности печатных изделий, таких, например, как газеты, журналы, их части и приложения к ним, согласно ограничительной части п.1 формулы.
У известного устройства этого рода (ЕР-А-0806391) присасывающее устройство состоит из всасывающих головок, размещенных на приводимом во вращение роторе. Присоединенные к источнику разрежения всасывающие головки прикладывают сверху к соответственно самому верхнему предмету, который затем под действием разрежения на всасывающем отверстии всасывающей головки захватывается и при дальнейшем движении всасывающей головки приподнимается со стопы. Всасывающее устройство приводит захваченное печатное изделие в рабочую зону толкающего устройства, которое воздействует на кромку приподнятого печатного изделия. В этот момент всасывающие головки отделяются от источника разрежения, в результате чего захваченное печатное изделие отпускается и сдвигается толкающим устройством со стопы.
Всасывающее устройство служит, таким образом, только для приподнимания печатных изделий со стопы, тогда как удаление печатных изделий происходит толкающим устройством.
Это известное устройство требует относительно больших механических затрат на управление движением всасывающих головок. К тому же средства управления необходимы для периодического подключения всасывающих головок к источнику разрежения и отключения от него.
Помимо этого известны устройства для приподнимания и удаления плоских предметов со стопы (ЕР-А-0585924 и GB-A-712337), содержащие присасывающие устройства, у которых всасывающая головка установлена с возможностью продольного перемещения по направляющей. Всасывающая головка удерживается в своем переднем положении приема посредством упруго деформирующегося возвратного элемента, например пружины сжатия. Во время контакта всасывающей головки присоски при присоединенном к источнику разрежения всасывающем отверстии с самым верхним предметом стопы происходит закрытие всасывающего отверстия, всасывающая головка движется против действия возвратного элемента самопроизвольно назад в заднее положение отдачи. За счет этого движения всасывающей головки захваченный предмет приподнимается со стопы. За счет движения присасывающего устройства вместе с захваченным предметом последний удаляется от стопы. Для освобождения удаленного таким образом предмета всасывающую головку отделяют от источника разрежения.
Эти решения требуют, таким образом, управления подключением источника разрежения к всасывающему отверстию всасывающей головки и отключением от него.
Из GB-A-2077240 известно соответствующее родовому понятию устройство для разборки вертикальной стопы листов, лежащей на опоре, находящейся на постоянной высоте и выполненной в виде ленточного конвейера. Для приподнимания соответственно самого верхнего листа со стопы имеется три присасывающих головки, установленных с возможностью перемещения в неподвижном корпусе. Присасывающие головки механически связаны между собой посредством стержня, удерживаемого на каждом своем конце в кронштейне. Оба кронштейна поворотно установлены также в неподвижной опоре. Присасывающие головки, постоянно присоединенные к источнику разрежения, прилегают к самому верхнему листу и приподнимаются вместе с захваченным листом. Приподнятый лист захватывается за два угла пальцами двух отводящих транспортеров, установленных по бокам стопы, и сдвигается с присасывающих головок. Сразу после освобождения всасывающих отверстий присасывающих головок последние под действием пружин сжатия, воздействующих на кронштейны, снова опускаются на стопу. Верхняя сторона стопы посредством управляющего фотоэлектрического устройства удерживается на определенной высоте. Это фотоэлектрическое устройство управляет движением двух транспортеров, которые установлены по бокам стопы, имеют по существу вертикальное направление подачи и периодически перемещают стопу вверх.
В основе настоящего изобретения лежит задача создания устройства описанного выше рода, которое при более простой конструкции и менее сложном управлении обеспечивало бы безупречную и щадящую изделия разборку стопы.
Эта задача решается с помощью устройства, описанного в пункте 1 формулы.
Поскольку направляющий элемент для перемещаемой всасывающей головки и сдвигающие средства размещены на несущей конструкции, которая установлена с возможностью перемещения в продольном направлении разбираемой стопы и через опорное устройство опирается на верхнюю сторону стопы, обеспечивается безупречное приподнимание и отведение отдельных предметов даже тогда, когда изменяется высота, на которой соответственно находится верхняя сторона стопы. Таким образом, отпадает необходимость в устройстве управления для установки верхней стороны стопы на заданный уровень.
Благодаря специальному конструктивному выполнению всасывающей головки и особому выполнению сдвигающих средств осуществляется управление движением всасывающей головки без подключения всасывающей головки к источнику разрежения и отключения от него только за счет сдвигания захваченных плоских предметов от всасывающего отверстия.
Предпочтительные модификации устройства согласно изобретению образуют объект зависимых пунктов.
Ниже примеры выполнения объекта изобретения более подробно поясняются с помощью фигур, схематично представляющих:
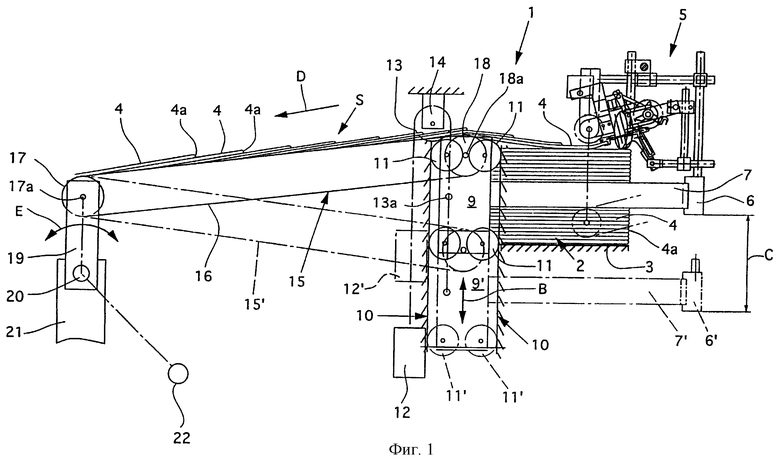
- фиг.1: устройство для разборки стопы плоских предметов при виде сбоку;
- фиг.2: в увеличенном масштабе и также при виде сбоку блок для приподнимания и сдвигания предметов со стопы;
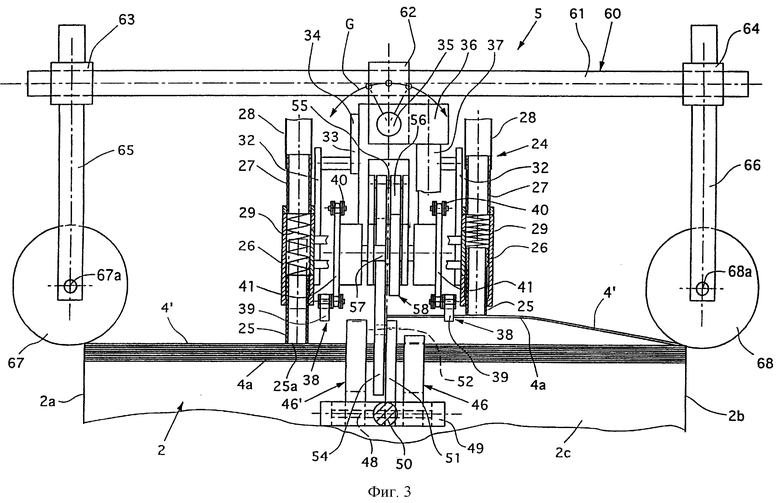
- фиг.3: вид блока из фиг.2 по стрелке А;
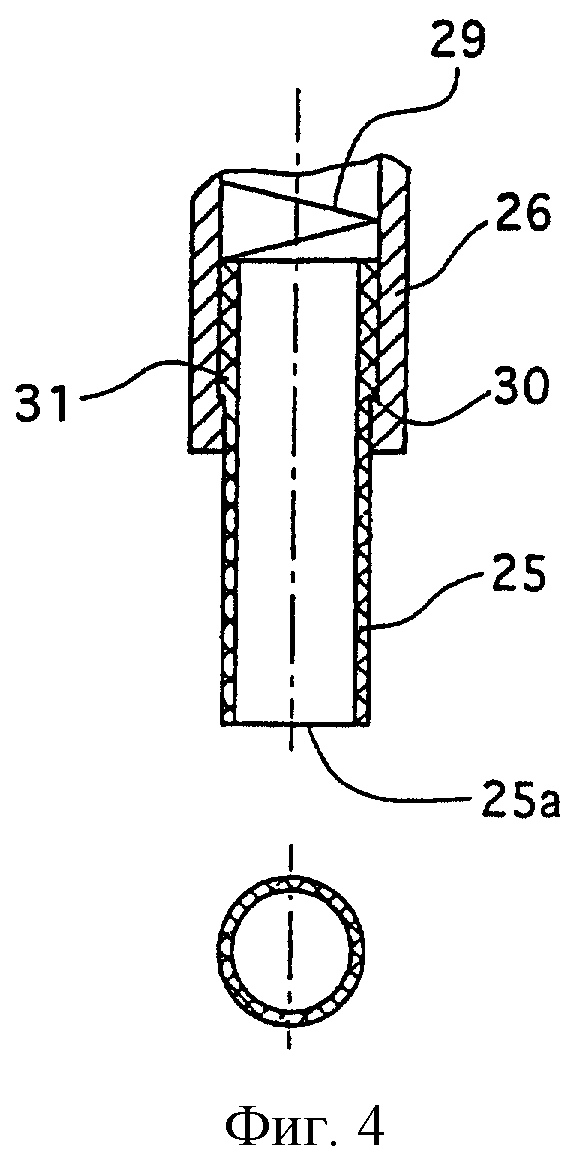
- фиг.4: всасывающая головка в продольном разрезе;
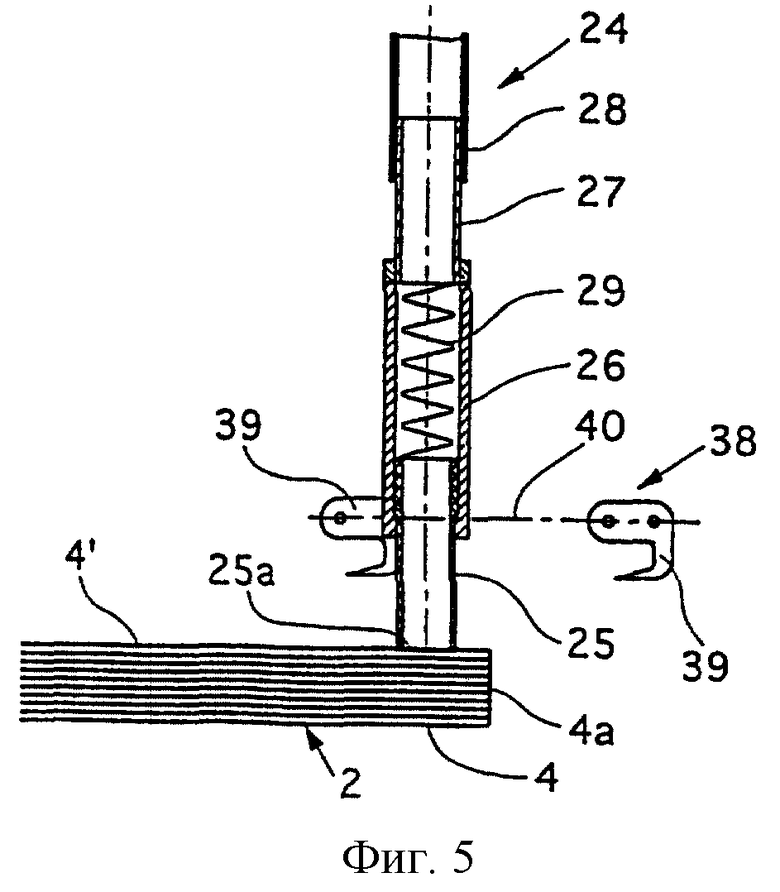
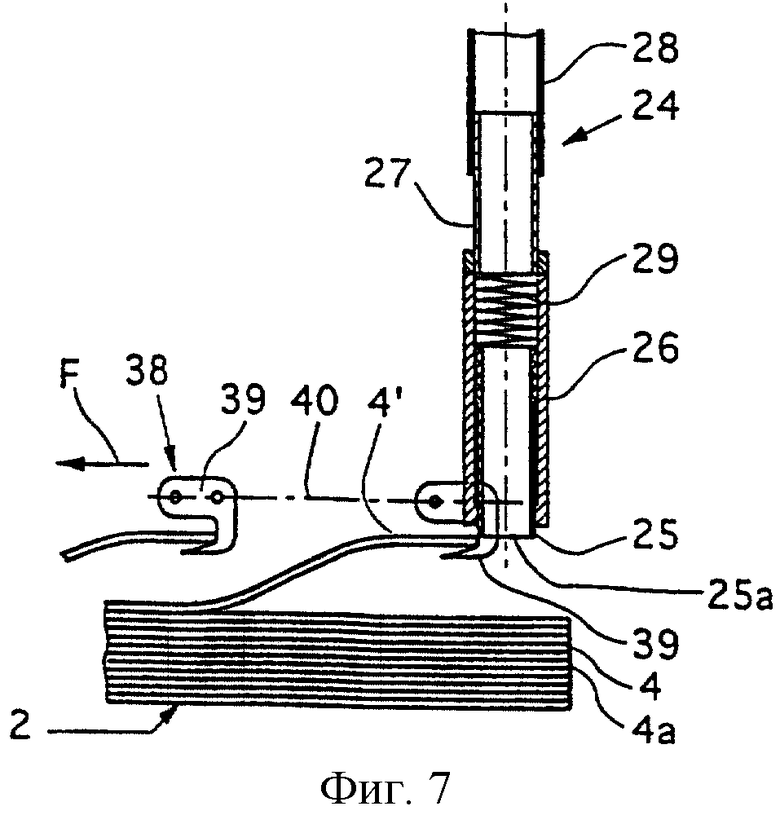
- фиг.5-7: упрощенно принцип работы блока для приподнимания и сдвигания предметов со стопы;
- фиг.8: в продольном разрезе другую форму выполнения всасывающей головки;
- фиг.9: разрез по линии IX-IX из фиг.8;
- фиг.10 и 11: два возможных решения пополнения стопы.
На фиг.1 полностью изображено устройство 1 для разборки стопы 2. Эта стопа 2 прилегает к опоре 3, которая расположена на определенной постоянной высоте. У данного примера выполнения стопа 2 состоит из предметов 4, которые здесь сложены. Этими предметами 4 могут быть газеты или журналы, а также их части или приложения к ним.
Для приподнимания и сдвигания соответственно самого верхнего предмета 4 со стопы 2 выполнен приподнимающе-сдвигающий блок 5, изображенный на фиг.3 и 4 в увеличенном масштабе. Этот приподнимающе-сдвигающий блок 5 закреплен на поперечном держателе 6, соединенном с двумя соединительными держателями 7,8, расположенными по бокам стопы 2.
Оба соединительных держателя 7, 8 соединены с салазками 9, установленными с возможностью продольного перемещения по стрелке В, т.е. с возможностью перемещения по высоте, в схематично изображенной продольной направляющей 10. На салазках 9 расположены направляющие ролики 11, опирающиеся на продольную направляющую 10. На салазки 9 воздействует противовес 12, соединенный с салазками 9 посредством тягового элемента 13. Место закрепления тягового элемента 13 на салазках 9 обозначено поз. 13 а. Тяговый элемент 13 проходит по неподвижному, установленному с возможностью вращения обводному ролику 14. Вместо противовеса 12 можно использовать также цилиндро-поршневой блок или газовую пружину.
Для отвода приподнятых со стопы 2 предметов 4 предусмотрен отводящий транспортер 15, выполненный в виде балансира и образованный в данном случае ленточным транспортером. Последний содержит один или несколько расположенных рядом транспортных ремней 16, проходящих по обводным роликам 17, 18. Обводной ролик 18 установлен своей осью 18а вращения в салазках 9 и совершает движение подъема вместе с салазками 9. Другой обводной ролик 17 удерживается своей осью 17а вращения в двух опорных кронштейнах 19, из которых на фиг.1 виден только один опорный кронштейн. Опорные кронштейны 19 расположены на опорной оси 20, установленной с возможностью вращения в частично изображенной станине 21. Для привода ленточного транспортера 15 по стрелке D служит схематично изображенный приводной двигатель 22.
Как видно из фиг.1, приподнятые со стопы 2 предметы 4 отводятся в виде каскада S, в котором каждый предмет 4 прилегает к последующему печатному изделию. Таким образом, в каскаде S догоняющие кромки 4а предметов 4, являющиеся в данном случае кромками сгиба, свободны.
На фиг.1 салазки 9 изображены в верхнем конечном положении. Нижнее конечное положение салазок 9 показано штрихпунктиром и обозначено поз. 9'. В этом нижнем конечном положении салазок 9 направляющие ролики и противовес занимают положение соответственно 11' и 12'. Возможный подъем салазок 9 указан стрелкой С. В этом нижнем конечном положении салазок 9 отводящий транспортер 15 и держатели 6, 7, 8 также занимают нижнее положение, также показанное на фиг.1 штрихпунктиром.
Ниже с помощью фиг.2, 3 и 4 более подробно поясняется конструкция приподнимающе-сдвигающего блока 5.
Этот приподнимающе-сдвигающий блок 5 содержит присасывающее устройство 24, к которому относятся две расположенные рядом на расстоянии друг с другом всасывающие головки 25. В каждой всасывающей головке 25 выполнено всасывающее отверстие 25а (фиг.4). Всасывающие головки 25 установлены в продольной направляющей 26 с возможностью перемещения в направлении своей продольной оси. С выполненными в форме полого цилиндра продольными направляющими 26 соединены выполненные также в форме полого цилиндра присоединительные патрубки 27 (фиг.3). К присоединительным патрубкам 27 присоединены соединительные трубопроводы 28, ведущие к источнику разрежения (не показан). Таким образом, каждое всасывающее отверстие 25а через продольную направляющую 26, присоединительный патрубок 27 и соединительный трубопровод 28 постоянно соединено с источником разрежения.
Между каждой всасывающей головкой 25 и неподвижным присоединительньм патрубком 27 расположена пружина 29 сжатия, которая стремится сместить всасывающую головку 25 в ее выдвинутое положение приема, показанное на фиг.3 слева и на фиг.4. Во избежание выталкивания всасывающих головок 25 из продольных направляющих 26 на каждой продольной направляющей 26 выполнен кольцеобразный заплечик 30 (фиг.4), который в выдвинутом конечном положении всасывающей головки 25 взаимодействует с кольцеобразным выступом 31 на всасывающей головке 25.
Каждая продольная направляющая 26 закреплена на удерживающем элементе 32, соединенном с соединительной деталью 33. Последняя закреплена на опорной детали 34, соединенной с продольным держателем 35. Через соединительный элемент 36 этот продольный держатель 35 соединен с несущей колонной 37, закрепленной на поперечном держателе 6.
К приподнимающе-сдвигающему блоку 5 относятся далее два сдвигающих блока 38, также расположенных на расстоянии рядом друг с другом. Каждый сдвигающий блок 38 находится вблизи всасывающей головки 25, как это изображено на фиг.3. Каждое сдвигающее средство 38, выполненное в виде сдвигающего блока, содержит определенное число поводковых органов 39, выполненных в виде сдвигающих кулачков, закрепленных с равными промежутками на бесконечной транспортной цепи 40. Каждая из этих транспортных цепей 40 проходит по обводным колесам 41, 42. Эти обводные колеса 41, 42, как показано, однако более подробно не описано, закреплены с возможностью вращения на несущей раме 44, образованной уже упомянутыми конструктивными элементами 34-37 и крепежным рычажным механизмом 43 (фиг.2). Одно обводное колесо каждого сдвигающего блока 38, например обводное колесо 42, приводится во вращение по часовой стрелке приводом (не показан), вследствие чего поводковые органы 39, выполненные в виде сдвигающих кулачков, движутся по стрелке F.
Приподнимающе-сдвигающий блок 5 содержит далее два прижимных элемента 46, расположенных на расстоянии рядом друг с другом. Каждый прижимной элемент 46 закреплен на опоре 47 (фиг.2), жестко посаженной на вал 48. Этот вал 48 установлен с возможностью вращения в опорной детали 49, которая закреплена на относящемся к крепежному рычажному механизму 43 держателе 50. С валом 48 соединен рычаг 51, который пальцем 52 входит в удлиненную направляющую прорезь 53 в управляющем рычаге 54. Этот управляющий рычаг 54 посажен на вал 55, установленный с возможностью вращения в несущей раме 44 подробно не описанным образом. С этим валом 55 прочно соединен управляющий рычаг 56. Этот управляющий рычаг 56 взаимодействует с закрепленным на общем валу 57 обводных колес 41 управляющим органом 58, который вращается, таким образом, вместе с этими обводными колесами 41 и содержит отстоящие управляющие пальцы 59 (фиг.2). В данном случае имеются три управляющих пальца 59, которые периодически воздействуют на управляющий рычаг 56 и приподнимают его. Приподнимание управляющего рычага 56 вызывает поворот управляющего рычага 54 в показанное на фиг.2 штрихпунктиром и обозначенное поз. 54' положение. За счет движения управляющего рычага 54 рычаг 51 поворачивается в обозначенное поз. 51' положение, вследствие чего прижимные элементы 46 поворачиваются назад в обозначенное на фиг.2 поз. 46' положение.
Приподнимающе-сдвигающий блок 5 содержит далее опорное устройство 60, которое служит для опоры несущей рамы 44 и образованной держателями 6, 7, 8 несущей конструкции на стопу 2. К этому опорному устройству 60 относится поперечный держатель 61, опирающийся через соединительный элемент 62 на продольный держатель 35 несущей рамы 44. Этот соединительный элемент 62 установлен с возможностью поворота на продольном держателе 35. Таким образом, этот соединительный элемент 62 и поперечный держатель 61 могут совершать качательное движение вокруг продольной оси продольного держателя 35. Это поворотное или качательное движение показано на фиг.3 стрелкой G.
На поперечном держателе 61 закреплены соединительные элементы 63, 64, в которых удерживаются несущие штанги 65, 66, продольные оси которых проходят, в основном, под прямым углом к продольной оси поперечного держателя 61. На нижнем свободном конце каждой несущей штанги 65, 66 с возможностью вращения установлено опорное колесо 67, 68. Эти опорные колеса 67, 68, как видно, в частности, из фиг.2, прилегают к стопе 2 в зоне ее боковых кромок 2а, 2b на ее углах. Опорные колеса 67, 68, как видно, в частности, из фиг.2, установлены наклонно. Это значит, что оси 67а, 68а опорных колес 67, 68 проходят поперек, т.е. ни параллельно, ни под прямым углом, к боковым поверхностям 2а, 2b, 2с стопы 2.
Из вышеприведенного описания конструкции устройства 1 для разборки стопы 2 видно, что опирающийся через опорное устройство 60 на стопу 2 приподнимающе-сдвигающий блок 5 во время описываемой ниже разборки стопы 2 следует за ней. Образованная держателями 6, 7, 8 несущая конструкция опускается тем самым с проходящими в направляющей 10 салазками 9, несущей рамой 44 и закрепленными на нем конструктивными элементами в процессе разборки стопы 2. Как видно из фиг.1, отводящий транспортер 15 совершает это движение опускания блока 5 и салазок 9 вместе с ними, причем опорные кронштейны 19 поворачиваются по стрелке Е.
Ниже принцип работы приподнимающе-сдвигающего блока 5 описан со ссылкой прежде всего на фиг.2-7.
Всасывающие головки 25 отрегулированы по высоте относительно опорных колес 67, 68 настолько жестко, что всасывающие головки 25 в своем выдвинутом положении приема прилегают всасывающим отверстием 25а к соответственно самому верхнему предмету 4' стопы 2, как это видно из фиг.3 слева и из фиг.5. В этом положении всасывающих головок 25 их постоянно присоединенное к источнику разрежения всасывающее отверстие 25а закрыто самым верхним предметом 4'. Внутри всасывающих головок 25 возникает, таким образом, разрежение. Вследствие этого всасывающие головки 25 вместе с захваченным самым верхним предметом 4' приподнимаются и движутся против действия пружин 29 сжатия из выдвинутого положения приема во вдвинутое положение. Это означает, что самый верхний предмет 4' в зоне его задней кромки 4а приподнимается со стопы 2 и перемещается по траектории движения поводковых органов 39 (фиг.1, фиг.2, фиг.3 справа, фиг.6).
Следующий поводковый орган 39 воздействует на приподнятый предмет 4' в зоне его задней кромки 4а и при своем дальнейшем движении по стрелке F сдвигает самый верхний предмет 4' со стопы 2, как это видно из фиг.1, 6, 7. В начале пути сдвигания самого верхнего предмета 4' всасывающие отверстия 25а всасывающих головок 25 еще закрыты (фиг.6), но все больше освобождаются. Как только захваченный самый верхний предмет 4' будет полностью сдвинут от всасывающего отверстия 25а всасывающих головок 25, всасывающие головки 25 под действием пружины 29 сжатия возвратятся в свое переднее положение приема, в котором они, как уже сказано, своими всасывающими отверстиями 25а прилегают к следующему предмету 4. Таким образом, описанный процесс приподнимания начинается снова.
Сдвигающие кулачки 39 сдвигающих блоков 38 переводят предметы 4 в рабочую зону отводящего транспортера 15, который отводит сдвинутые со стопы 2 предметы 4 в виде каскада S (фиг.1). Здесь следует отметить, что, само собой, можно также выбирать расстояния между поводковыми органами 39 так, чтобы сдвинутые предметы 4 не накладывались друг на друга внахлест на отводящем транспортере 15 и отводились вследствие этого не в виде каскада S, а друг за другом. Положение сдвигающих кулачков 39 по фазе относительно приподнятых предметов 4 можно регулировать, за счет чего можно согласовать момент сдвигания предметов 4.
Как показано на фиг.2 и 3, прижимные элементы 46 находятся в заднем положении ожидания, когда всасывающие головки 25 занимают свое переднее положение приема и прилегают к самому верхнему предмету 4'. Это положение ожидания показано на фиг.2 штрихпунктиром и обозначено поз. 46' и изображено слева на фиг.3. В то время как всасывающие головки 25 описанным образом совершают движение от стопы 2, прижимные элементы 46, управляемые управляющими пальцами 59, управляющим рычагом 54 и рычагом 51, движутся к верхней стороне стопы 2. В рабочем положении в зоне задней кромки 4а предметов 4 они прилегают сверху к стопе 2, как только самый верхний предмет 4' будет приподнят всасывающими головками 25 со стопы 2, однако прежде чем произойдет сдвигание самого верхнего предмета 4'. Это рабочее положение прижимных элементов 46 показано на фиг.2 сплошными линиями и на фиг.3 справа.
Прижимные элементы 46, давящие сверху на стопу 2 в своем рабочем положении, должны гарантировать, что при сдвигании предварительно приподнятого предмета 4' сдвигающими кулачками 39 не будет захвачен нижележащий предмет 4.
Как только управляющий рычаг 56 сойдет с управляющего пальца 59, прижимные элементы 46 снова повернутся назад в свое вдвинутое положение ожидания.
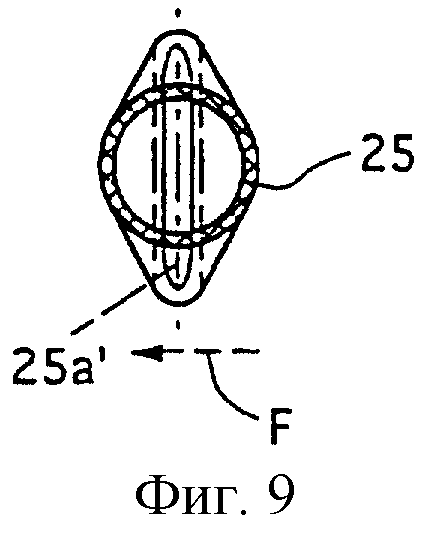
Как уже было указано, всасывающие головки 25 движутся из своего вдвинутого положения разгрузки снова в выдвинутое положение приема, как только их всасывающие отверстия 25а будут свободны. Таким образом, можно сократить время рабочего цикла всасывающих головок 25 с минимальным размером всасывающих отверстий 25а в направлении F сдвига. Для того чтобы, тем не менее, получить достаточно большое всасывающее отверстие 25а, у предпочтительной формы выполнения присасывающее отверстие 25а' выполнено по типу продольной щели, как это изображено на фиг.8 и 9. Выполненное в виде щелевого сопла всасывающее отверстие 25а' проходит при этом в направлении, которое образует с направлением F сдвигания угол около 90°.
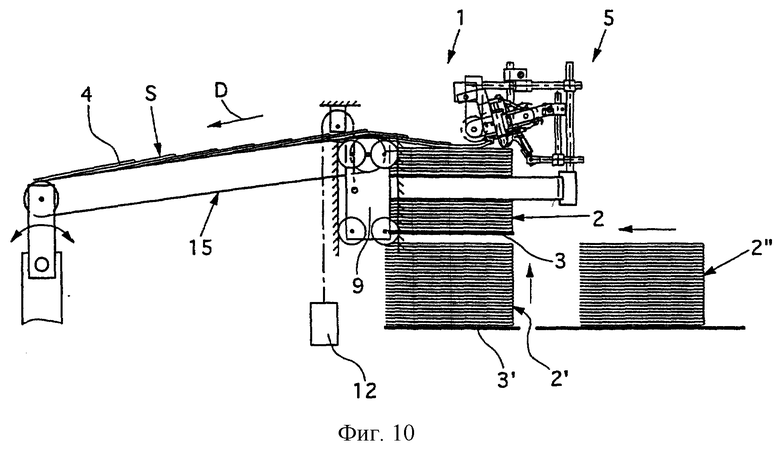
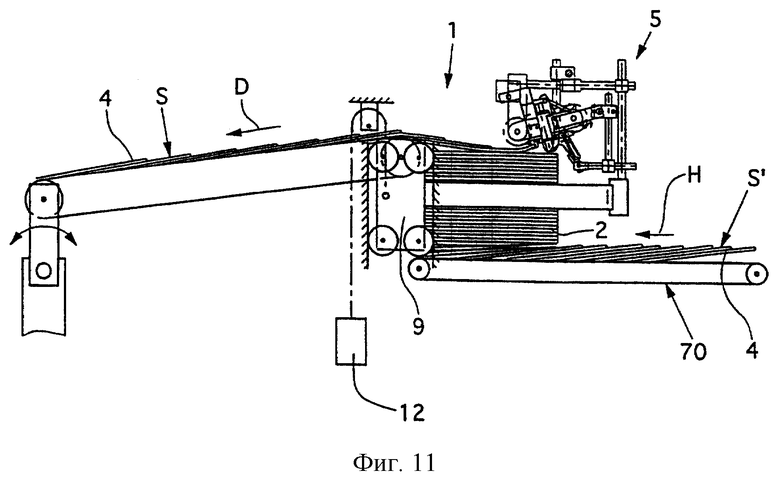
С помощью фиг.10 и 11 поясняются два варианта пополнения разбираемой стопы 2.
У формы выполнения на фиг.10 под опору 3, на которой лежит стопа 2, подают новую стопу 2'. Если стопа 2 почти разобрана, нижележащая стопа 2' может быть подвинута вверх подробно не показанным образом. Это перемещение стопы 2' может происходить либо во время прерывания процесса разборки, либо в процессе разборки стопы 2. Опоры 3,3' попеременно выполняют функцию поддержки стопы.
На фиг.10 поз. 2’’ обозначена другая стопа, которую после подвигания стопы 2' в положение разборки смещают на место этой стопы 2'.
У формы выполнения на фиг.11 к стопе 2 снизу непрерывно каскадом S' посредством подающего транспортера 70 по стрелке Н подают новые предметы 4. В каскаде S' каждый предмет 4 прилегает к следующему печатному изделию. Загрузка стопы 2 происходит тем самым так же, как у устройства по ЕР-А-0806391, с тем отличием, что подающий транспортер 70 выполнен не в виде балансира, а может быть расположен без изменения своего положения. Это возможно потому, что приподнимающе-сдвигающий блок 5 из-за своего опирания на верхнюю сторону стопы и своей подвижной опоры способен следовать за изменяющимся уровнем верхней стороны стопы 2. Подающий транспортер 70 выполняет функцию неподвижной по высоте опоры 3 изображенного на фиг.1 и 10 устройства 1.
Из предшествующего описания вытекает также существенное преимущество устройства согласно изобретению. Оно не требует управления высотой опоры 3 соответственно подающего транспортера 70 так, чтобы верхняя сторона стопы 2 всегда находилась на одинаковом уровне, поскольку приподнимающе-сдвигающий блок 5 способен следовать за изменяющейся высотой верхней стороны стопы 2.
Понятно, что различные конструктивные элементы, в частности сдвигающие средства 38, а также прижимные элементы 46 и их привод, могут быть выполнены также иным образом, чем это описано и изображено. Так, например, можно сдвинуть приподнятые присасывающим устройством 24 предметы 4 с помощью толкающего устройства, описанного в уже упомянутой публикации ЕР-А-0806391.
У изображенных примеров выполнения соответствующий, удерживаемый всасывающими головками 25 предмет 4 сдвигается поводковыми органами 39 сдвигающих средств 38 со всасывающих головок 25, с тем чтобы освободить всасывающее отверстие 25а всасывающих головок 25. Иначе говоря, поводковые органы 39 движутся мимо неподвижных всасывающих головок 25.
Для сдвигания захваченных предметов 4 со всасывающих головок 25 можно также при одинаковом в остальном принципе работы всасывающих головок 25 двигать их вместе с захваченным предметом 4 к неподвижным упорам. Это препятствует дальнейшему движению захваченного, прилегающего к этим упорам предмета 4, и всасывающие головки 25 соскальзывают при своем дальнейшем движении с предметом 4, что приводит к освобождению всасывающих отверстий 25а. Затем всасывающие головки 25 снова движутся от упоров назад в свое исходное положение для захвата следующего печатного изделия. Это требует соответствующего управления и увеличивает продолжительность рабочего цикла.



Изобретение относится к устройствам для разборки стопы плоских предметов, в частности газет, журналов, их частей и приложений к ним. На верхнюю сторону разбираемой стопы (2) опирается приподнимающе-сдвигающий блок (5), который содержит присасывающее устройство для приподнимания соответственно предмета (4) и сдвигающий блок для сдвигания приподнятого предмета (4) со стопы (2) на отводящий транспортер (15). Этот приподнимающе-сдвигающий блок (5) расположен на несущей конструкции (6, 7), закрепленной на салазках (9). Эти салазки (9) установлены с возможностью перемещения по высоте в продольной направляющей (10). Отводящий транспортер (15) установлен со стороны приема также на этих салазках (9). Опора (3) для разбираемой стопы (2) неподвижна по высоте. Приподнимающе-сдвигающий блок (5) опускается по мере уменьшения высоты стопы (2). Это обеспечивает щадящую изделия разборку стопы, упрощение конструкции и управления устройством. 8 з.п. ф-лы, 11 ил.
| СПОСОБ БЕСШОВНОГО СОЕДИНЕНИЯ МАТЕРИАЛОВ | 1992 |
|
RU2077240C1 |
| DE 4012779 С, 02.05.1991 | |||
| Волнировщик свежесформованных асбестоцементных листов | 1977 |
|
SU691296A1 |
| RU 1837559 А1, 20.10.1996 | |||
| US 4993321 А, 19.02.1991. | |||

