Изобретение относится к области машиностроения и может быть использовано в импульсных вариаторах и инерционных трансформаторах.
Известен механизм свободного хода (см. а.с. №901682, МКИ F 16 D 41/00, 1982 г.), который содержит две полумуфты, в одной из которых установлены оси с телами сцепления в виде конических колес с косыми зубьями, колеса установлены вершинами конусов навстречу друг другу. Тела сцепления подпружинены со стороны больших торцов.
Недостатками указанной конструкции механизма свободного хода являются недостаточная нагрузочная способность, надежность и срок службы.
Известен механизм свободного хода (см. а.с. №1341408, МКИ F 16 D 41/00, 1987 г.), взятый за прототип, который содержит две полумуфты, в одной из которых расположены оси с подвижно установленными на них телами заклинивания, выполненными в виде зубчатых колес, кинематически соединенных с другой полумуфтой, выполненной в виде зубчатого колеса. Зубчатые колеса выполнены шевронными, а профиль каждого зуба несимметричен, при этом угол наклона профиля зуба со стороны заклинивания равен углу самоторможения, а угол наклона профиля зуба с незаклинивающейся стороны определяют из условия
где βyi - углы наклона зубьев колес на окружностях произвольных радиусов для незаклинивающихся сторон профилей, i=1, 2;
γ - угол отклонения нормали в зацеплении от оси вращения, γ=90°-β;
fмакс - максимальное значение коэффициента трения скольжения в зацеплении.
Недостатками указанной конструкции механизма свободного хода являются недостаточные нагрузочная способность, надежность и срок службы.
Предлагаемым изобретением решается задача повышения эксплуатационных характеристик механизма свободного хода.
Технический результат, получаемый при осуществлении изобретения, заключается в повышении нагрузочной способности, долговечности, надежности и уменьшении габаритных размеров.
Указанный технический результат достигается тем, что в механизме свободного хода, содержащем две полумуфты, в одной из полумуфт расположены оси с подвижно установленными на них телами заклинивания, выполненными в виде зубчатых колес, кинематически соединенных с другой полумуфтой, выполненной в виде зубчатого колеса, причем зубчатые колеса выполнены шевронными, а профиль каждого зуба несимметричен, новым является то, что зацепление тел заклинивания и ведомой полумуфты выполнено внутренним с углом наклона профиля зуба со стороны заклинивания  не меньше угла самоторможения и определяемым по формуле
не меньше угла самоторможения и определяемым по формуле

а угол наклона профиля с незаклинивающейся стороны  определяют из условия обеспечения свободного хода
определяют из условия обеспечения свободного хода

где  - углы наклона зубьев колес на окружностях произвольных радиусов для заклинивающихся сторон профилей;
- углы наклона зубьев колес на окружностях произвольных радиусов для заклинивающихся сторон профилей;
 - углы наклона зубьев колес на окружностях произвольных радиусов для незаклинивающихся сторон профилей;
- углы наклона зубьев колес на окружностях произвольных радиусов для незаклинивающихся сторон профилей;
γ - угол отклонения нормали в зацеплении от оси вращения γ=90°-β;
fмин - минимальное значение коэффициента трения скольжения в зацеплении;
fмакс - максимальное значение коэффициента трения скольжения в зацеплении.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и не следуют явным образом из уровня техники. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
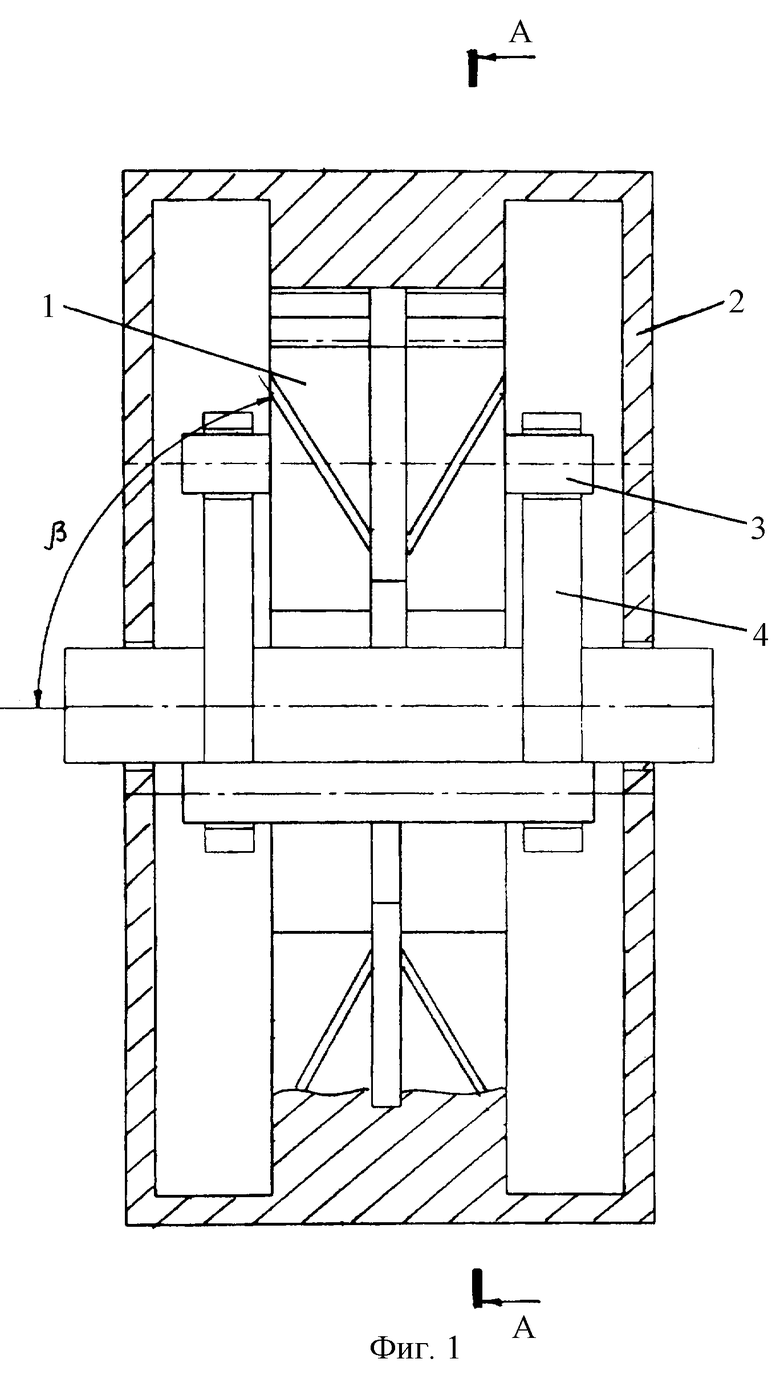
Сущность предлагаемое техническое решение поясняется чертежами. На фиг.1 изображен механизм свободного хода, осевой разрез; на фиг.2 - разрез А-А на фиг.1.
Механизм свободного хода (МСХ) содержит три тела 1 заклинивания, находящихся в зацеплении с ведомой полумуфтой 2, причем зацепление выполнено внутренним. Оси 3 тела 1 заклинивания установлены на подшипниках скольжения в ведущей полумуфте 4. Тела 1 заклинивания и ведомая полумуфта 2 выполнены в виде цилиндрических шевронных колес с несимметричным профилем 5 зубьев. Угол наклона профиля 5 зуба со стороны заклинивания 6 не меньше угла самоторможения и определяется по формуле

а угол наклона профиля 5 зуба с незаклинивающейся стороны 7 определяют из условия, обеспечивающего свободный ход

где  - углы наклона зубьев колес на окружностях произвольных радиусов для заклинивающихся сторон профилей;
- углы наклона зубьев колес на окружностях произвольных радиусов для заклинивающихся сторон профилей;
 - углы наклона зубьев колес на окружностях произвольных радиусов для незаклинивающихся сторон профилей;
- углы наклона зубьев колес на окружностях произвольных радиусов для незаклинивающихся сторон профилей;
γ - угол отклонения нормали в зацеплении от оси вращения γ=90°-β;
fмин - минимальное значение коэффициента трения скольжения в зацеплении;
fмакс - максимальное значение коэффициента трения скольжения в зацеплении.
Тела 1 заклинивания должны быть установлены с возможностью осевого перемещения для обеспечения самоустанавливаемости.
Механизм свободного хода работает следующим образом.
При приложении момента (по часовой стрелке) к ведущей полумуфте 4 самотормозящие профили вступают в контакт и заклиниваются. В этом случае вращение передается от ведущей полумуфты 4 к ведомой полумуфте 2. При противоположном направлении момента контактируют несамотормозящие профили и полумуфты 2 и 4 могут вращаться независимо друг от друга.
Конструкция механизма свободного хода содержит только жесткие элементы, что повышает ее долговечность. Использование шевронной передачи позволяет распределить передаваемый момент между полушевронами. Внутреннее зацепление позволяет повысить нагрузочную способность механизма и уменьшить габариты. Вступление в контакт той или иной точки профиля носит случайный характер, поэтому активные участки профилей изнашиваются равномерно. Износ приводит к увеличению люфта, но свойства механизма свободного хода сохраняются.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм свободного хода | 1985 |
|
SU1341408A1 |
| Привод механизма подъема | 1989 |
|
SU1620729A1 |
| ЗУБЧАТАЯ ПЕРЕДАЧА | 1995 |
|
RU2086831C1 |
| Цилиндрическая зубчатая передача | 1990 |
|
SU1803645A1 |
| ПРИВОДНОЙ МОСТ КОЛЕСНОГО СРЕДСТВА | 1994 |
|
RU2086428C1 |
| Цилиндрическая зубчатая передача | 1987 |
|
SU1479765A1 |
| ЗУБЧАТО-РЫЧАЖНЫЙ ВАРИАТОР | 1995 |
|
RU2091643C1 |
| ЗАЦЕПЛЕНИЕ КОЛЕС С КРИВОЛИНЕЙНЫМИ ЗУБЬЯМИ (ВАРИАНТЫ) И ПЛАНЕТАРНАЯ ПЕРЕДАЧА НА ЕГО ОСНОВЕ | 2007 |
|
RU2338105C1 |
| КОСОЗУБАЯ ЦИЛИНДРИЧЕСКАЯ ЗУБЧАТАЯ ПЕРЕДАЧА ВНЕШНЕГО ЗАЦЕПЛЕНИЯ | 2002 |
|
RU2224154C1 |
| ПРОТИВОБУКСУЮЩИЙ ДИФФЕРЕНЦИАЛ | 1993 |
|
RU2091644C1 |
Изобретение относится к области машиностроения и может быть использовано для соединения валов в импульсных вариаторах и инерционных трансформаторах. Механизм свободного хода содержит две полумуфты, между которыми выполнены тела заклинивания в виде шевронных зубчатых колес. Зацепление тел заклинивания и ведомой полумуфты выполнено внутренним, угол наклона профиля зубьев со стороны заклинивания  не меньше угла самоторможения и определяется по формуле
не меньше угла самоторможения и определяется по формуле  , а угол наклона профиля зубьев с незаклинивающейся стороны
, а угол наклона профиля зубьев с незаклинивающейся стороны  определяют из условия обеспечения свободного хода:
определяют из условия обеспечения свободного хода:  , где
, где  - углы наклона зубьев колес на окружностях произвольных радиусов для заклинивающихся сторон профилей,
- углы наклона зубьев колес на окружностях произвольных радиусов для заклинивающихся сторон профилей,  - углы наклона зубьев колес на окружностях произвольных радиусов для незаклинивающихся сторон профилей,
- углы наклона зубьев колес на окружностях произвольных радиусов для незаклинивающихся сторон профилей,  - угол отклонения нормали в зацеплении от оси вращения
- угол отклонения нормали в зацеплении от оси вращения  ,
,  - минимальное значение коэффициента трения скольжения в зацеплении,
- минимальное значение коэффициента трения скольжения в зацеплении,  - максимальное значение коэффициента трения скольжения в зацеплении. Техническим результатом является повышение нагрузочной способности механизма, его долговечности, надежности и уменьшение габаритных размеров. 2 ил.
- максимальное значение коэффициента трения скольжения в зацеплении. Техническим результатом является повышение нагрузочной способности механизма, его долговечности, надежности и уменьшение габаритных размеров. 2 ил.
Механизм свободного хода, содержащий две полумуфты, в одной из полумуфт расположены оси с подвижно установленными на них телами заклинивания, выполненными в виде шевронных зубчатых колес, кинематически соединенных с другой полумуфтой, выполненной в виде шевронного зубчатого колеса, отличающийся тем, что зацепление тел заклинивания и ведомой полумуфты выполнено внутренним с углом наклона профиля зуба со стороны заклинивания  не меньше угла самоторможения и определяемым по формуле
не меньше угла самоторможения и определяемым по формуле

а угол наклона профиля зуба с незаклинивающейся стороны  определяют из условия обеспечения свободного хода
определяют из условия обеспечения свободного хода

где  - углы наклона зубьев колес на окружностях произвольных радиусов для заклинивающихся сторон профилей;
- углы наклона зубьев колес на окружностях произвольных радиусов для заклинивающихся сторон профилей;
 - углы наклона зубьев колес на окружностях произвольных радиусов для незаклинивающихся сторон профилей;
- углы наклона зубьев колес на окружностях произвольных радиусов для незаклинивающихся сторон профилей;
γ - угол отклонения нормали в зацеплении от оси вращения γ=90°-β;
fмин - минимальное значение коэффициента трения скольжения в зацеплении;
fмакс - максимальное значение коэффициента трения скольжения в зацеплении.
| Механизм свободного хода | 1985 |
|
SU1341408A1 |

