Изобретение относится к машиностроению и может быть использовано в станках и грузоподъемных машинах.
Цель изобретения - упрощение конструкции и снижение динамических нагруз ок и шума путем совмещения в зубчатой передаче функций вращения и торможения.
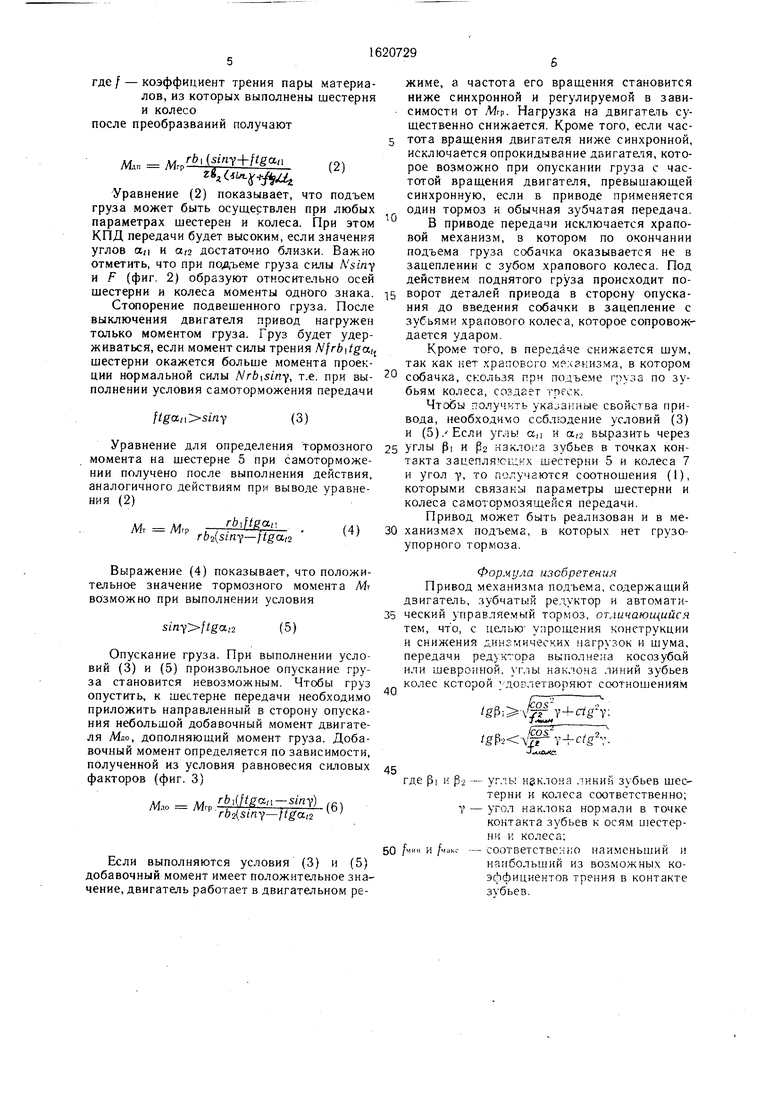
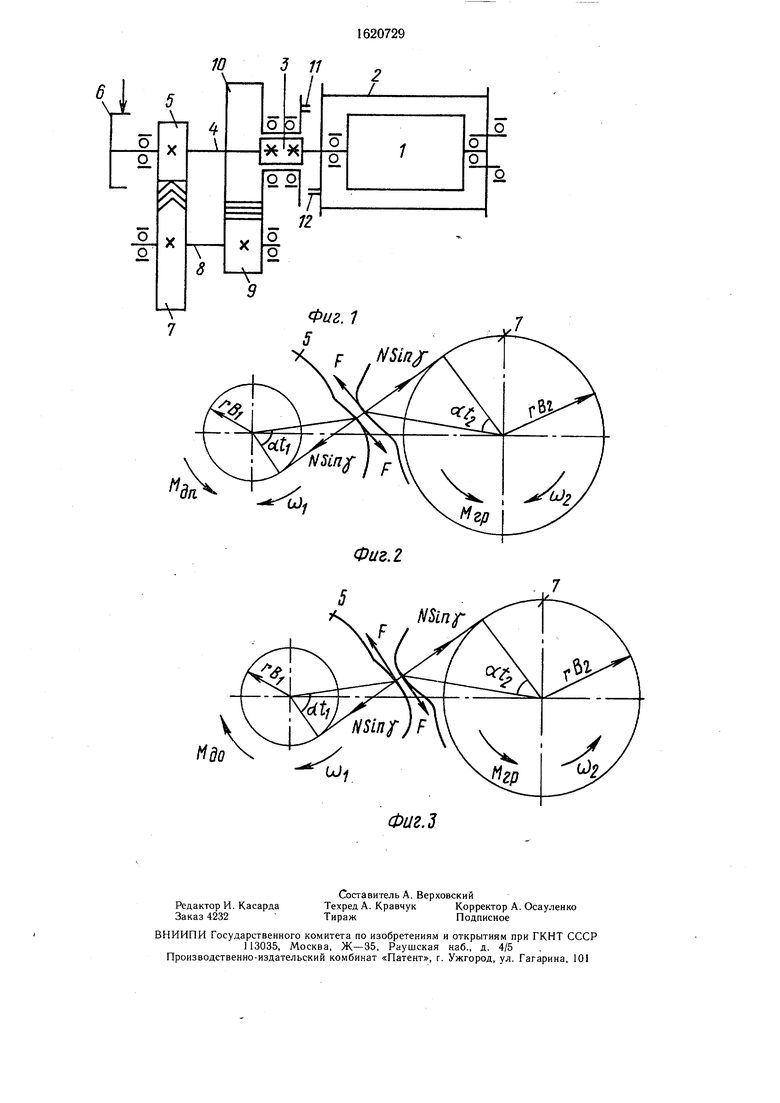
На фиг. 1 приведена кинематическая схема механизма подъема груза; на фиг. 2 - геометрическая схема передачи, торцовое сечение (направления сил и моментов сил соответствуют процессу подъема груза); на фиг. 3 - схема передачи при направлении сил и моментов сил, соответствующих процессу опускания груза.
Привод механизма содержит электродвигатель 1, встроенный в грузовой барабан 2, причем статор электродвигателя неподвижно закреплен в барабане 2, а ротор установлен на подшипниках, размещенных в его расточках. С помощью глухой муфты 3 вал ротора электродвигателя соединен с быстроходным валом 4 редуктора, выполненным заодно с шевронной шестерней 5, угол наклона линии зубьев fi которой выполнен в соответствии с условием
tgfo
Icos2iy
-VTT r
Умим.
ctg-y;
+ e g Y,
J ИЛЛЮ
где pi - угол наклона линии зуба шестерни; р2-угол наклона линии зуба колеса; Y - угол наклона нормали в точке контакта зубьев к осям шестерни и колеса;
/мнн
и /макс - соответственно наименьший и наибольший из возможных в расчетных условиях коэффициентов трения в контакте зубьев. На конце быстроходного вала 4 установлен шкив электромагнитного автоматического тормоза 6. С шестерней 5 введено в зацепление шевронное колесо 7, установленное на промежуточном валу 8. Угол наклооэto о J to со
на линии зубьев р2 колеса 7 выполнен в соответствии с условием (1)., Шестерни 5 и колесо 7 образуют быстроходную передачу редуктора привода.
Тихоходная ступень редуктора привода образована шестерней 9 на промежуточном валу 8 и зубчатым колесом 10, соосно установленным с быстроходным валом 4, свободно проходящим через отверстие ступицы колеса 10.
возможно, так как передача становится самотормозящейся. Рассматривая работу привода механизма, торможение управляемым автоматическим тормозом 6 не учитывают. Опускание груза. Звенья кинематической цепи (фиг. 1) механизма привода при опускании груза работают так же, как и при подъеме груза, но с противоположным направлением вращения. Поскольку произвольное опускание груза при выполнении услоКолесо 10 соединено с барабаном 2 зуб- Ю вия невозможно, то при наличии чатой муфтой, один венец 11 которой выпол-самотормозящейся передачи в приводе (равней на ступице колеса, другой венеи 12 соединен с барабаном 2.
/V - сила, нормальная к поверхностям
но как и при наличии грузоупорного тормоза) к шестерне 5 необходимо приложить момент двигателя Мдо (добавочный) направзубьев колес; F - сила трения; шь угло- 1Б леный в сторону опускания груза.
вые скорости вращения шестерни и колеса;Момент двигателя Мю должен быть таМдо-добавочный момент двигателя; Мдл-кой величины, чтобы в сумме с приведенмомент двигателя при подъеме груза; тЬ и
rb% - соответственно радиусы основных
цилиндров шестерни и колеса; Мгр - момент
20
груза, приведенный к колесу; at, а/2 - углы профилей зубьев в торцовом сечении соответственно шестерни и колеса.
Работу привода рассмотрим в процессах подъема груза, стопорения поднятого груза и опускания груза.
Подъем груза. Включенный электродвигатель 1 (управляемый тормоз 6 автоматически размыкается) приводит во вращение быстроходный вал 4 с шестерней 5, а от нее - промежуточный вал с колесом 7 и шестерней 9. Последняя вращает колесо 10 и от зо синхронной, него через зубчатую муфту с венцами 11 и 12 приводится во вращение барабан 2.
Рассмотрим работу зубчатого зацепления быстроходной ступени, состоящей из шестерни 5 и колеса 7 (фиг. 2). Как на зуб шестерным к шестерне 5 моментом груза они были достаточными для преодоления создаваемого грузом момента сил трения в зацеплении. Так как двигатель при опускании груза создает только добавочный момент, он нагружен значительно меньше, чем двигатель, принимающий полный приведенный момент груза, в механизме с одним автоматичес- ким тормозом
Поскольку двигатель преодолевает действие тормозного момента самотормозящейся передачи, -он работает в двигательном режиме и частота вращения его ротора ниже
Упрощение конструкции привода достигается тем, что полностью исключаются детали грузоупорного тормоза, применяемые в прототипе: опорный диск, храповое колесо с ни 5, так и на зуб колеса 7 действуют две 35 приклепанными фрикционными накладками, силы - нормальная /V и образованная ею си- собачка храпового механизма с пружиной и ла трения F. Нормальная сила N наклонена к геометрическим осям колес под углом -у- В торцовом сечении перпендикулярно к оси действует ее составляющая, равная Nsiny.
При подъме груза моменты сил Nsiny и F относительно оси шестерни 5 преодолеваются крутящим моментом электродвигателя
Млп (индекс п означает подъем груза). Моменты этих же сил относительно оси колеса
осью, опорный диск. Отпадает необходимостью во многозаходной резьбе, нарезаемой на промежуточном валу и внутри ступицы зубчатого колеса на этом валу, а также в образовании рабочей торцовой плоскости этого колеса, выполняющего и роль нажимного диска тормоза.
Основание работоспособности привода ме7 преодолевают момент Мгр зом.
Стопорение подвешенного груза. После выключения электродвигателя действие его движущего момента Мдп прекращается. Момент груза МгР стремится вращать шестерню 5 и колесо 7 в сторону опускания нагрузки. На фиг. 3 направление возможного вращения показано стрелками с обозначениями coi и Момент Мдо при остановленном двигателе не действует. Силы трения изменяют свое направление. Следовательно, силы Nsiny и F создают относительно осей шестерни и колеса моменты разных знаков. Если момент силы трения F больше момента силы Nsiny, то движение груза в сторону опускания неОснование работоспособности привода месозданный гру- 45 ханизма с зубчатой передачей по условию (1) при выполнении ею функций, которые осуществляются зубчатой передачей и грузо- упорным тормозом.
Подъем груза. Из условия равновесия 50 шестерни 5 (фиг. 2) имеют
Мдп Nrb siny- -Frb, tgan, из условия равновесия колеса 7 55МгР Nrb1siny- -Frbltga.t 2.
Учитывая, что
,
возможно, так как передача становится самотормозящейся. Рассматривая работу привода механизма, торможение управляемым автоматическим тормозом 6 не учитывают. Опускание груза. Звенья кинематической цепи (фиг. 1) механизма привода при опускании груза работают так же, как и при подъеме груза, но с противоположным направлением вращения. Поскольку произвольное опускание груза при выполнении усло вия невозможно, то при наличии самотормозящейся передачи в приводе (равкой величины, чтобы в сумме с приведен
синхронной,
ным к шестерне 5 моментом груза они были достаточными для преодоления создаваемого грузом момента сил трения в зацеплении. Так как двигатель при опускании груза создает только добавочный момент, он нагружен значительно меньше, чем двигатель, принимающий полный приведенный момент груза, в механизме с одним автоматичес- ким тормозом
синхронной,
Поскольку двигатель преодолевает действие тормозного момента самотормозящейся передачи, -он работает в двигательном режиме и частота вращения его ротора ниже
Упрощение конструкции привода достигается тем, что полностью исключаются детали грузоупорного тормоза, применяемые в прототипе: опорный диск, храповое колесо с приклепанными фрикционными накладками, собачка храпового механизма с пружиной и
осью, опорный диск. Отпадает необходимостью во многозаходной резьбе, нарезаемой на промежуточном валу и внутри ступицы зубчатого колеса на этом валу, а также в образовании рабочей торцовой плоскости этого колеса, выполняющего и роль нажимного диска тормоза.
Основание работоспособности привода ,
где/ - коэффициент трения пары материалов, из которых выполнены шестерня и колесо
после преобразваний получают
MU, Mr/bt(sin-t+ftgan
(2)
Уравнение (2) показывает, что подъем груза может быть осуществлен при любых параметрах шестерен и колеса. При этом КПД передачи будет высоким, если значения углов a/i и достаточно близки. Важно отметить, что при подъеме груза силы Nsiny и F (фиг. 2) образуют относительно осей шестерни и колеса моменты одного знака.
Стопорение подвешенного груза. После выключения двигателя привод нагружен только моментом груза. Груз будет удерживаться, если момент силы трения .tl шестерни окажется больше момента проек- ции нормальной силы , т.е. при выполнении условия самоторможения передачи
ftga.
(3)
Уравнение для определения тормозного момента на шестерне 5 при самоторможении получено после выполнения действия, аналогичного действиям при выводе уравнения (2)
Мл /Игр
.. .t rbz(sin -ftgat(4)
Выражение (4) показывает, что положительное значение тормозного момента M возможно при выполнении условия
smt ftgctt2
(5)
Опускание груза. При выполнении условий (3) и (5) произвольное опускание груза становится невозможным. Чтобы груз опустить, к шестерне передачи необходимо приложить направленный в сторону опускания небольшой добавочный момент двигателя Мю, дополняющий момент груза. Доба- вочный момент определяется по зависимости, полученной из условия равновесия силовых факторов (фиг. 3)
М МгР rbMtgan-siny) (6) rb smy-ftgau v ;
Если выполняются условия (3) и (5) добавочный момент имеет положительное значение, двигатель работает в двигательном режиме, а частота его вращения становится ниже синхронной и регулируемой в зависимости от Мр. Нагрузка на двигатель существенно снижается. Кроме того, если частота вращения двигателя ниже синхронной, исключается опрокидывание двигателя, которое возможно при опускании груза с частотой вращения двигателя, превышающей синхронную, если в приводе применяется один тормоз и обычная зубчатая передача. В приводе передачи исключается храповой механизм, в котором по окончании подъема груза собачка оказывается не в зацеплении с зубом храпового колеса. Под действием поднятого груза происходит поворот детален привода в сторону опускания до введения собачки в зацепление с зубьями храпового колеса, которое сопровождается ударом
Кроме того, в передаче снижается шум, так как кет храпового ур кизма, в котором
0 собачка, скользя грч подъеме гпза по зубьям колеса, создает треск
Чтобы гго.пуччть ука згные свойства привода, необходимо соблюдение условий (3) и (5). Если углы a,i и а,2 выразить через
5 углы PI и р2 наклона зубьев в точках контакта зацепля ои - х шестерни 5 и колеса 7 и угол у, то получаются соотношения (1), которыми связаны параметры шестерни и колеса самотормозящейся передачи.
Привод может быть реализован и в ме0 ханизмах подъема, в которых нет грузо- упорного тормоза.
Формула изобретения Привод механизма подъема, содержащий двигатель, зубчатый редуктор и автоматн- 5 ческий управляемый тормоз, отличающийся тем, что, с целью упрощения конструкции и снижения динсмических нагрузок и шума, передачи выполнена косозубай или шевронной, глы наклона линий зубьев колес которой ; доглетворяют соотношениям
0
/cos, Si Y
У- -ctg2y.
v«
где pi и р - утлы наклона линии шестерни и колеса соответственно; V - угол наклона нормали в точке контакта зубьев к осям шестерни и колеса;
/« и /MdKv - соответственно наименьший и наибольший из возможных коэффициентов трения в контакте з бьев

| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ | 1990 |
|
RU2016816C1 |
| Зубчатая передача | 1981 |
|
SU1083015A1 |
| Лебедка | 1979 |
|
SU821394A1 |
| ТАЛЬ ПНЕВМАТИЧЕСКАЯ | 2002 |
|
RU2208572C1 |
| Цилиндрическая зубчатая передача | 1990 |
|
SU1803645A1 |
| Ручная лебедка | 1974 |
|
SU497213A2 |
| ОСТАНОВ ДЛЯ ГРУЗА, ПЕРЕМЕЩАЕМОГО МЕХАНИЗМОМ ПОДЪЕМА | 2001 |
|
RU2211796C2 |
| ТОРМОЗ ДЛЯ ПОДЪЕМНЫХ МЕХАНИЗМОВ | 1967 |
|
SU205253A1 |
| МЕХАНИЗМ ПОДЪЕМА ТАЛИ | 1999 |
|
RU2159733C1 |
| ПРОТИВОБУКСУЮЩИЙ ДИФФЕРЕНЦИАЛ | 1993 |
|
RU2091644C1 |
Изобретение относится к машиностроению и может быть использовано в станках и грузоподъемных машинах. Целью изобретения является упрощение конструкции и снижение динамических нагрузок и шума путем совмещения в зубчатой передаче функций вращения и торможения. Привод механизма подъема содержит шевронные шестерню 5 и колесо 7 с ограниченными. по величине углами наклона линий зубьев, значения которых удовлетворяют соотношениям, выраженным через торцовые углы профилей зубьев, угол отклонения нормали в точке контакта зацепляющихся зубьев от осей шестерни и колеса и максимальный и минимальный коэффициенты трения в зацеплении. 3 ил.
Фиг. 2
| Подъемно-транспортные машины | |||
| Атлас конструкций | |||
| Под ред | |||
| М | |||
| П | |||
| Александрова и Д | |||
| Н | |||
| Решетова, М.: Машиностроение, 1987, лист 36 | |||
| с | |||
| Приспособление для плетения проволочного каркаса для железобетонных пустотелых камней | 1920 |
|
SU44A1 |
