Изобретение относится к электротехнике и может использоваться для улучшения характеристик систем автоматического регулирования частоты вращения исполнительного органа механизма, упруго связанного с электродвигателем.
Наиболее близким к заявляемой системе автоматического регулирования является: одноконтурная CAP угловой скорости электропривода с улучшенными характеристиками /1/, которая принимается за прототип.
Прототип содержит: электродвигатель постоянного тока, соединенный с исполнительным органом механизма, подключенный к выходу импульсного преобразователя, задатчик частоты вращения, выход которого соединен с входом фильтра, фильтр, выход которого соединен с первым входом регулятора частоты вращения, регулятор частоты вращения, выход которого соединен с блоком управления импульсным преобразователем, блок управления импульсным преобразователем, выход которого соединен с входом импульсного преобразователя, датчик частоты вращения электродвигателя, выход которого соединен со вторым входом регулятора частоты вращения.
При эксплуатации прототипа обнаружен следующий недостаток - при упругом соединении электродвигателя постоянного тока с исполнительным органом механизма возникает ошибка регулирования частоты вращения исполнительного органа, что снижает точность отработки задания.
Задача, решаемая изобретением, заключается в повышении точности отработки задающего воздействия исполнительным органом механизма, упруго связанным с электродвигателем.
Техническим результатом от использования изобретения является повышение точности отработки задающего воздействия исполнительным органом механизма, упруго связанным с электродвигателем.
Указанный технический результат достигается тем, что в известную систему введены дваждыпозиционный-дифференциально-дваждыдифференциальный блок (1), вход которого соединен с выходом датчика частоты вращения электродвигателя, а выход соединен со вторым входом регулятора частоты вращения, датчик тока, дваждыпозиционный-дваждыдифференциальный блок (2), вход которого соединен с выходом датчика тока, а выход соединен с третьим входом регулятора частоты вращения, датчик частоты вращения исполнительного органа механизма, выход которого соединен с четвертым входом регулятора частоты вращения, фильтр выполнен в виде позиционного блока второго порядка (3), регулятор частоты вращения выполнен в виде пропорционально-интегрально-дваждыинтегрального блока (4).
Передаточные функции введенных и измененных блоков:




где ТС, τС - постоянные времени корректора скорости;
ТРС, τРС - постоянные времени регулятора скорости;
ТТ - постоянная времени корректора тока;
βРС - динамический коэффициент регулятора скорости;
Тμ - постоянная времени электропривода;
р - комплексный параметр преобразования Лапласа.
Таким образом, введение: дваждыпозиционного-дифференциально-дваждыдифференциального блока, датчика тока, дваждыпозиционного-дваждыдифференциального блока, датчика частоты вращения исполнительного органа механизма, изменение: фильтра, регулятора частоты вращения, позволило получить передаточные функции частоты вращения исполнительного органа механизма по управляющему и возмущающему воздействиям заявляемого устройства в виде:


где В1 = Тμ;





ω2 - частота вращения исполнительного органа механизма;
UЗ - задающее напряжение контура регулирования частоты вращения исполнительного органа механизма;
МС - момент сопротивления электропривода, приложенный к исполнительному органу механизма;
КОС - коэффициент обратной связи по скорости;
J2 - момент инерции исполнительного органа механизма;
СУ - жесткость связи электродвигателя с исполнительным органом механизма.
Указанные передаточные функции получаются при настройке параметров фильтра, регулятора частоты вращения и блоков корректирующих обратных связей по следующим формулам:





где LЯ - индуктивность якорной цепи электродвигателя;
RЯ - сопротивление якорной цепи электродвигателя;
J1 - момент инерции электродвигателя;
СМ, СК - коэффициенты электродвигателя;
КИП - коэффициент усиления импульсного преобразователя;
КОТ - коэффициент обратной связи по току.
Если в системе меняется жесткость связи электродвигателя с исполнительным органом механизма СУ, возможна параметрическая адаптация по вышеуказанным формулам.
Передаточной функции контура регулирования частоты вращения исполнительного органа механизма по каналу управления “задающее напряжение контура регулирования частоты вращения исполнительного органа механизма - частота вращения исполнительного органа механизма” соответствует максимально плоская амплитудно-частотная характеристика, т.е. контур отрабатывает управляющий сигнал с минимально возможной динамической ошибкой.
Передаточной функции контура регулирования частоты вращения исполнительного органа механизма по каналу возмущения “момент сопротивления электропривода, приложенный к исполнительному органу механизма - частота вращения исполнительного органа механизма” показывает, что достигнута нулевая статическая ошибка регулирования по углу поворота исполнительного органа механизма.
Следовательно, достигнуты: отсутствие статической ошибки регулирования по углу поворота исполнительного органа механизма, отсутствие статической ошибки регулирования частоты вращения исполнительного органа механизма, минимально возможная динамическая ошибка частоты вращения исполнительного органа механизма при отработке системой автоматического регулирования управляющего воздействия, минимально возможная динамическая ошибка частоты вращения исполнительного органа механизма при ступенчатом внешнем воздействии, предельное быстродействие контура регулирования.
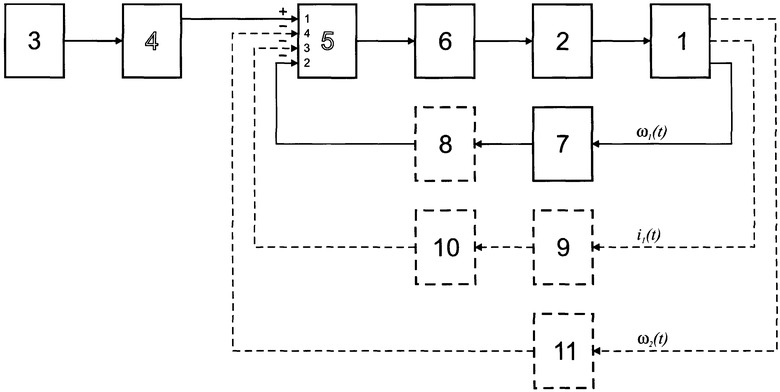
На чертеже представлена структурная схема системы автоматического регулирования частоты вращения исполнительного органа механизма, упруго связанного с электродвигателем, одноконтурной астатической второго порядка.
Система автоматического регулирования частоты вращения исполнительного органа механизма, упруго связанного с электродвигателем, одноконтурная астатическая второго порядка содержит электродвигатель постоянного тока, упруго связанный с исполнительным органом механизма 1, подключенный к выходу импульсного преобразователя 2, задатчик частоты вращения 3, выход которого соединен с входом фильтра 4, фильтр 4, выполненный в виде позиционного блока второго порядка, выход которого соединен с первым входом регулятора частоты вращения 5, регулятор частоты вращения 5, выполненный в виде пропорционально-интегрально-дваждыинтегрального блока, выход которого соединен с блоком управления импульсным преобразователем 6, блок управления импульсным преобразователем 6, выход которого соединен с входом импульсного преобразователя 2, датчик частоты вращения электродвигателя 7, выход которого соединен с входом дваждыпозиционного-дифференциально-дваждыдифференциального блока 8, дваждыпозиционный-дифференциально-дваждыдифференциальный блок 8, выход которого соединен со вторым входом регулятора частоты вращения 5, датчик тока 9, выход которого соединен с входом дваждыпозиционного-дваждыдифференциального блока 10, дваждыпозиционный-дваждыдифференциальный блок 10, выход которого соединен с третьим входом регулятора частоты вращения 5, датчик частоты вращения исполнительного органа механизма 11, выход которого соединен с четвертым входом регулятора частоты вращения 5.
Система автоматического регулирования частоты вращения исполнительного органа механизма, упруго связанного с электродвигателем, одноконтурная астатическая второго порядка работает следующим образом.
Сигнал с выхода задатчика частоты вращения 3, проходя через фильтр 4, поступает на первый вход регулятора частоты вращения 5, на второй вход которого поступает сигнал отрицательной обратной связи по частоте вращения электродвигателя постоянного тока от блока 8, на третий вход которого поступает сигнал отрицательной обратной связи по току якоря электродвигателя постоянного тока от блока 10, на четвертый вход которого поступает сигнал отрицательной обратной связи по частоте вращения исполнительного органа механизма от блока 11. Блоки 8 и 10 корректируют сигналы обратных связей по частоте вращения и току якоря электродвигателя постоянного тока. Регулятор частоты вращения 5 формирует зависимость частоты вращения исполнительного органа механизма от времени ω2(t). Сигнал с выхода регулятора частоты вращения 5 поступает на вход блока управления импульсным преобразователем 6, который управляет импульсным преобразователем 2.
Таким образом, улучшение характеристик системы автоматического регулирования частоты вращения исполнительного органа механизма, упруго связанного с электродвигателем, одноконтурной астатической второго порядка достигается за счет настройки фильтра и регулятора частоты вращения, а также введения обратных связей по току якоря и частоте вращения исполнительного органа механизма электродвигателя постоянного тока, блоков корректирующих обратных связей.
Используемая литература:
1. Ю.П.Добробаба, А.Г.Мурлин, В.А.Мурлина, О.В.Акулов, Е.А.Погребной. Разработка одноконтурной CAP угловой скорости электропривода с улучшенными характеристиками // Научный журнал “Труды КубГТУ” - Краснодар: Кубан. гос. технолог, ун-т, 2000. - т.VII - серия “Информатика и управление”. - Вып.1. - С.215-222.
Изобретение относится к электротехнике и может быть использовано для улучшения характеристик систем автоматического регулирования частоты вращения исполнительного органа механизма, упруго связанного с электродвигателем. Технический результат заключается в повышении точности отработки задающего воздействия исполнительным органом механизма, упруго связанным с электродвигателем. В систему автоматического регулирования частоты вращения исполнительного органа механизма, упруго связанного с электродвигателем, одноконтурной астатической второго порядка, введены дважды позиционный-дифференциально-дважды дифференциальный блок, вход которого соединен с выходом датчика частоты вращения электродвигателя, а выход соединен со вторым входом регулятора частоты вращения, датчик тока, дваждыпозиционный-дваждыдифференциальный блок, вход которого соединен с выходом датчика тока, а выход соединен с третьим входом регулятора частоты вращения, датчик частоты вращения исполнительного органа механизма, выход которого соединен с четвертым входом регулятора частоты вращения, фильтр выполнен в виде позиционного блока второго порядка, регулятор частоты вращения выполнен в виде пропорционально-интегрально-дваждыинтегрального блока. 1 ил.
Система автоматического регулирования частоты вращения исполнительного органа механизма, упруго связанного с электродвигателем, одноконтурная астатическая второго порядка, содержащая электродвигатель постоянного тока, упруго соединенный с исполнительным органом механизма, подключенный к выходу импульсного преобразователя, задатчик частоты вращения, выход которого соединен с входом фильтра, выход которого соединен с первым входом регулятора частоты вращения, выход которого соединен с блоком управления импульсным преобразователем, выход которого соединен с входом импульсного преобразователя, датчик частоты вращения электродвигателя, отличающаяся тем, что в систему автоматического регулирования введены дваждыпозиционный-дифференциально-дваждыдифференциальный блок, вход которого соединен с выходом датчика частоты вращения электродвигателя, а выход соединен со вторым входом регулятора частоты вращения, датчик тока, дваждыпозиционный-дваждыдифференциальный блок, вход которого соединен с выходом датчика тока, а выход соединен с третьим входом регулятора частоты вращения, датчик частоты вращения исполнительного органа механизма, выход которого соединен с четвертым входом регулятора частоты вращения, причем фильтр выполнен в виде позиционного блока второго порядка, регулятор частоты вращения выполнен в виде пропорционально-интегрально-дваждыинтегрального блока.
| ДОБРОБАБА Ю.П | |||
| и др | |||
| Разработка одноконтурной CAP угловой скорости электропривода с улучшенной характеристикой | |||
| Труды КубГТУ | |||
| - Краснодар: Кубанский государственный технологический университет, 2000, т.VII, серия “Информатика и управление”, вып.1, с.215-222 | |||
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1996 |
|
RU2096903C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1999 |
|
RU2164859C2 |
| Астатическая система регулирования | 1978 |
|
SU842708A1 |
| Электропривод постоянного тока | 1978 |
|
SU817953A1 |
| SU 1769336 А1, 15.10.1992 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ КАТОДА ДЛЯ CO -ЛАЗЕРА | 1992 |
|
RU2042223C1 |
| US 3599062 А, 10.08.1971 | |||
| DE 3722099 A1, 28.01.1988 | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |

