Изобретение относится к силовым системам управления летательных аппаратов и наиболее целесообразно может быть использовано в электропневматических рулевых приводах и автопилотах малогабаритных управляемых снарядов и ракет.
В составе систем управления малогабаритных летательных аппаратов широко используется газовый рулевой привод. Достоинством этого привода является возможность обеспечения высоких динамических характеристик при малых габаритах и весах, простота конструкции и эксплуатации, высокая готовность к действию, возможность работы в сложных условиях окружающей среды.
В практике проектирования газовых силовых систем управления, особенно бортового размещения, традиционно актуальна проблема улучшения их массогабаритных показателей [8].
В последнее время в рулевых приводах и автопилотах управляемых снарядов и ракет комплексов высокоточного оружия наибольшее распространение получил не имеющий аналогов в мировой практике вновь созданный тип рулевого привода - воздушно-динамический (ВДРП) [1-5], в котором используется энергия набегающего воздушного потока. Использование энергии набегающего воздушного потока позволило исключить из состава снаряда и ракеты бортовой источник питания, предельно упростить конструкцию привода и сократить массу, объем и трудоемкость привода.
Одним из путей дальнейшего совершенствования газовых рулевых приводов малогабаритных управляемых снарядов и ракет является совершенствование элементов привода в направлении улучшения их характеристик, а следовательно, и привода в целом.
Одним из таких элементов привода является электромеханический преобразователь (электромагнит), во многом определяющий габаритно-массовые показатели привода, быстродействие и точность работы привода, электропотребление, трудоемкость изготовления и стоимость всего привода.
Известен (аналог) блочный толкающий однопозиционный арматурный электромагнитный привод (АЭМП) с внешним притягивающим сердечником, выполненным в виде диска постоянной толщины [9, с.35-38, рис.11; таблицы 3-5 блочный АЭМП К96.484-006 напряжением питания постоянного тока 12 В]. Привод состоит из корпуса, являющегося одновременно одним из элементов магнитопровода броневого типа, с фланцем для крепления, катушки, сердечника (якоря электромагнита), крышки, выходного силового элемента, возвратной пружины и полюса, При подаче напряжения на обмотку катушки сердечник под действием магнитного поля притягивается к полюсу, сжимает пружину и толкает выходной силовой элемент. Фиксация выходного силового элемента в этом крайнем положении осуществляется магнитным полем, создаваемым обмоткой. После отключения тока в обмотке пружина перемещает сердечник вместе с выходным силовым элементом в исходное положение.
Недостатками известного электромагнитного привода [9] являются малые тяговое усилие и быстродействие, большое электропотребление, большие габариты и масса, что не позволяет его применять в качестве электромагнитного привода в пневмораспределителе с клапанным регулированием для управления воздушным потоком на выходе из рабочей полости рулевой машины в быстродействующих высокоточных пневмоприводах, например релейных и автоколебательных рулевых приводах малогабаритных управляемых снарядов и ракет, в которых используется энергия набегающего воздушного потока.
Из анализа конструкции [9, рис.11] известного электромагнитного привода видно, что конструкция привода выполнена нерационально с точки зрения обеспечения максимального тягового усилия и быстродействия, с большим электропотреблением.
Отмеченные недостатки являются следствием того, что в известном электромагнитном приводе якорь выполнен тонким. За счет этого магнитное сопротивление якоря магнитному потоку, создаваемому катушкой, существенное. По расчету площадей поперечного сечения элементов цепи магнитопровода на пути магнитного потока конструкции привода [9, рис.11] видно, что площадь поперечного цилиндрического сечения якоря  над центральной частью торцевой цилиндрической стенки полюса составляет (в масштабе чертежа)
над центральной частью торцевой цилиндрической стенки полюса составляет (в масштабе чертежа)  =97 мм2, а площадь поперечного сечения полюса (S1)-S1=349 мм2. То есть сечение якоря (толщина якоря) занижена весьма существенно, почти в 3,5 раза, что приводит к увеличению магнитного сопротивления якоря и, как следствие, к существенному уменьшению (ограничению) магнитного потока Фo.
=97 мм2, а площадь поперечного сечения полюса (S1)-S1=349 мм2. То есть сечение якоря (толщина якоря) занижена весьма существенно, почти в 3,5 раза, что приводит к увеличению магнитного сопротивления якоря и, как следствие, к существенному уменьшению (ограничению) магнитного потока Фo.
Для сравнения площадь поперечного цилиндрического сечения якоря над центральной частью торцевой стенки корпуса  составляет
составляет  =254 мм2, а площадь поперечного сечения корпуса (S2)-S2=475 мм2, то есть ограничение магнитного потока в этом месте не существенно. Не наблюдается также ограничения магнитного потока и по дну магнитопровода, где площадь поперечного цилиндрического сечения дна в наиболее худшем месте (S3), то есть на меньшем диаметре, соответствующем диаметру окружности наружной поверхности полюса, составляет S3=388 мм2.
=254 мм2, а площадь поперечного сечения корпуса (S2)-S2=475 мм2, то есть ограничение магнитного потока в этом месте не существенно. Не наблюдается также ограничения магнитного потока и по дну магнитопровода, где площадь поперечного цилиндрического сечения дна в наиболее худшем месте (S3), то есть на меньшем диаметре, соответствующем диаметру окружности наружной поверхности полюса, составляет S3=388 мм2.
Тогда как в рационально спроектированном электромагнитном приводе магнитопровод и якорь не должны существенно влиять на ограничение рабочего магнитного потока, то есть магнитное сопротивление должно быть наименьшим. Неучет этого условия не позволяет реализовать близкие к предельным возможности электромагнитного привода в части повышения тягового усилия и быстродействия привода и снижения его электропотребления и приводит к уменьшению тягового усилия и быстродействия и завышению электропотребления.
Так как магнитная энергия, создаваемая ампервитками катушки в рабочем воздушном зазоре, преобразуется в тяговое усилие электромагнита, основной задачей при его проектировании является обеспечение минимально возможных потерь намагничивающей силы в железе магнитопровода. Указанное условие вытекает из рассмотрения зависимости, определяющей величину электромагнитной силы F [10, стр.182].

где F - тяговое усилие электромагнита;
Фo - магнитный поток в воздушном зазоре электромагнита, равный 
где J - ток в катушке электромагнита;
W - число витков катушки;
Ro - магнитное сопротивление рабочего воздушного зазора, определяемого максимальным ходом якоря электромагнита;
Rж - магнитное сопротивление железа цепи магнитопровода;
К - коэффициент, зависящий от формы и площади рабочего воздушного зазора.
Для выполнения этой задачи магнитопровод и якорь не должны существенно влиять на ограничение рабочего магнитного потока Ф0, то есть магнитное сопротивление железа Rж магнитопровода и якоря должно быть минимальным, чтобы магнитный поток Фо в цепи магнитопровода был максимальным. Известный электромагнитный привод [9, рис.11] из-за большого магнитного сопротивления тонкого якоря этому требованию не удовлетворяет со всеми вытекающими отсюда отрицательными последствиями в части снижения тягового усилия и быстродействия электромагнита, повышения электропотребления.
Известен [6] воздушно-динамический блок рулевого привода управляемого снаряда, принятый в качестве ближайшего аналога (прототипа). Воздушно-динамический блок рулевого привода содержит рули и рулевые машины с электромагнитным пневмораспределителем клапанного типа, включающим в себя корпус цилиндрической формы из немагнитного материала, например, пластмассы (пресс-материала ДСВ-4-0), с фланцем для крепления с проточными каналами по периметру корпуса, связанными с выходом рабочей полости рулевой машины, магнитопровод броневого типа с дном постоянной толщины с обмоткой управления, подпружиненный якорь в виде диска постоянной толщины, служащий одновременно клапаном, перекрывающим выходные отверстия проточных каналов пневмораспределителя.
Для электромагнитного привода (электромагнита) пневмораспределителя известного привода [6] характерны существенные тянущие усилия на упоре, что важно при значительной по величине реакции струи воздуха в распределительном устройстве.
Магнитопровод и обмотка управления электромагнита находятся в корпусе пневмораспределителя.
Воздушный поток регулируется на выходе пневмораспределителя клапанным распределительным устройством, обеспечивающим максимальный перепад давлений в рабочих полостях пневмопривода и максимальную скорость перемещения рулей.
В качестве рабочего тела в приводе [6] используется энергия набегающего воздушного потока, зависящая от скорости полета управляемого снаряда. Электропитание электромагнита обеспечивается от бортовых источников тока ограниченной емкости, например малогабаритных термоэлектролитических батарей.
Недостатки известного [6] воздушно-динамического блока рулевого привода управляемого снаряда с электромагнитным пневмораспределителем клапанного типа с регулированием на выходе из рабочей полости рулевой машины являются общими с недостатками известного [9] однопозиционного арматурного электромагнитного привода, так как они вызваны одними и теми же причинами, о которых подробно изложено выше (очень тонкий якорь с большим магнитным сопротивлением).
Разработка и модернизация комплексов высокоточного управляемого вооружения связана с ростом дальностей и скоростей полета управляемых снарядов и ракет. Увеличение дальности полета управляемого снаряда и ракеты связано с увеличением времени работы рулевого привода, то есть с увеличением электропотребления от бортового источника ограниченной емкости. Увеличение скорости полета снаряда и ракеты приводит к увеличению рабочего давления сжатого воздуха на входе рулевого привода, то есть к необходимости обеспечения работоспособности привода с требуемыми характеристиками при повышенном давлении. Все это накладывает противоречивые требования к электромагнитному приводу пневмораспределителя рулевых приводов в части увеличения тягового усилия и быстродействия электромагнитного привода при уменьшении электропитания (в условиях ограничения по габаритам и массе), что позволяет обеспечить работу рулевого привода при больших входных давлениях сжатого воздуха в течение длительного времени работы на участке управляемого полета снаряда и ракеты с требуемыми быстродействием и точностью работы привода.
Задачей предлагаемого изобретения является повышение тягового усилия и быстродействия электромагнитного пневмораспределителя клапанного типа для пневмоприводов при снижении потребляемой электрической мощности в условиях ограничения по массе и габаритам малогабаритных управляемых снарядов и ракет, повышение быстродействия и точности работы привода.
Это достигается тем, что в воздушно-динамическом блоке рулевого привода управляемого снаряда, содержащем рули и рулевые машины с электромагнитным пневмораопределителем клапанного типа, включающим в себя электромагнит с подпружиненным якорем, служащим одновременно клапаном, якорь выполнен переменной толщины, определяемой из соотношения 
где di, hi - диаметр i-го поперечного сечения якоря, перпендикулярного его оси, и толщина якоря до плоскости данного сечения;
Smin - площадь минимального поперечного сечения магнитопровода электромагнита по цепи основного магнитного потока, создаваемого обмоткой управления электромагнита.
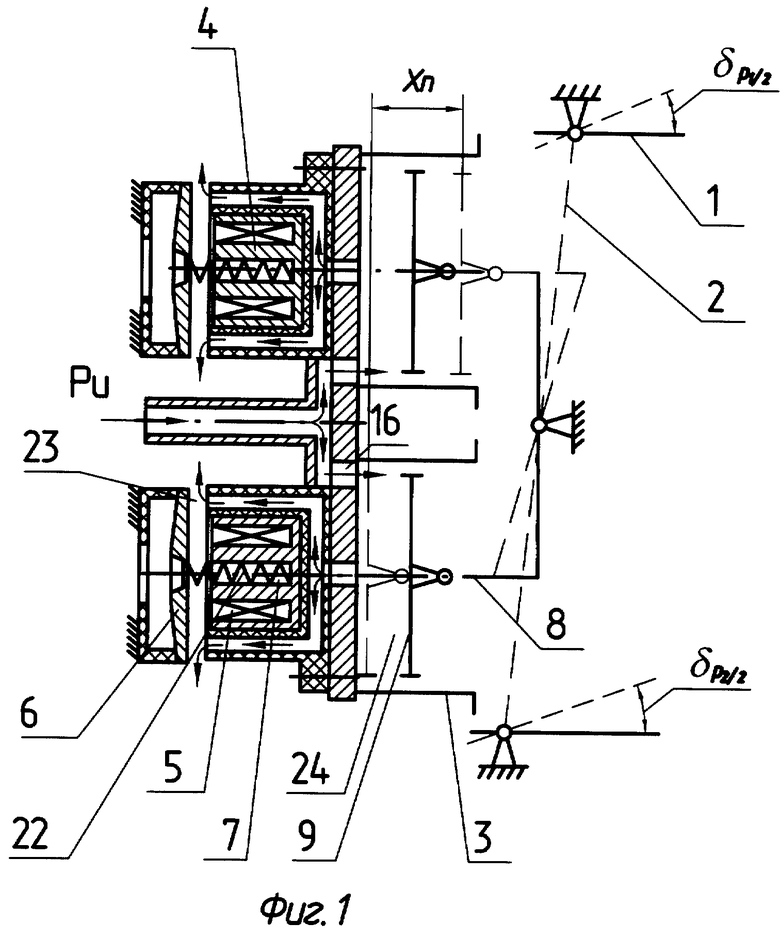
На фиг.1 приведена принципиальная схема одного из каналов предлагаемого воздушно-динамического блока рулевого привода управляемого снаряда, каждый канал которого состоит из пары рулей 1, объединенных между собой осью 2, рулевой машины, включающей в себя два отдельных силовых цилиндра 3 (СЦ1 и СЦ2), пневматического распределительного устройства (ПРУ) с клапанным регулированием на выходе, включающим в себя два отдельных электромагнита 4 с обмотками управления 5 (ОУ1 и ОУ2), якорями 6 (Я1 и Я2) и мaгнитoпpoвoдaми 7.
Рули 1 через ось 2 и штоки 8 связаны с поршнями 9 силовых цилиндров 3.
На фиг.2 приведена принципиальная схема электромагнитного пневмораспределителя клапанного типа с якорем переменной толщины. Пневмораспределитель содержит корпус 26 цилиндрической формы из немагнитного материала, например пластмассы (пресс-материал ДСВ-4-0), с ушками 27 для крепления с проточными каналами 28 по периметру корпуса, связанными с рабочей полостью рулевой машины, магнитопровод 7 броневого типа с обмоткой управления 5, якорь 6, пружину 22, регулировочный винт 29, упор 30.
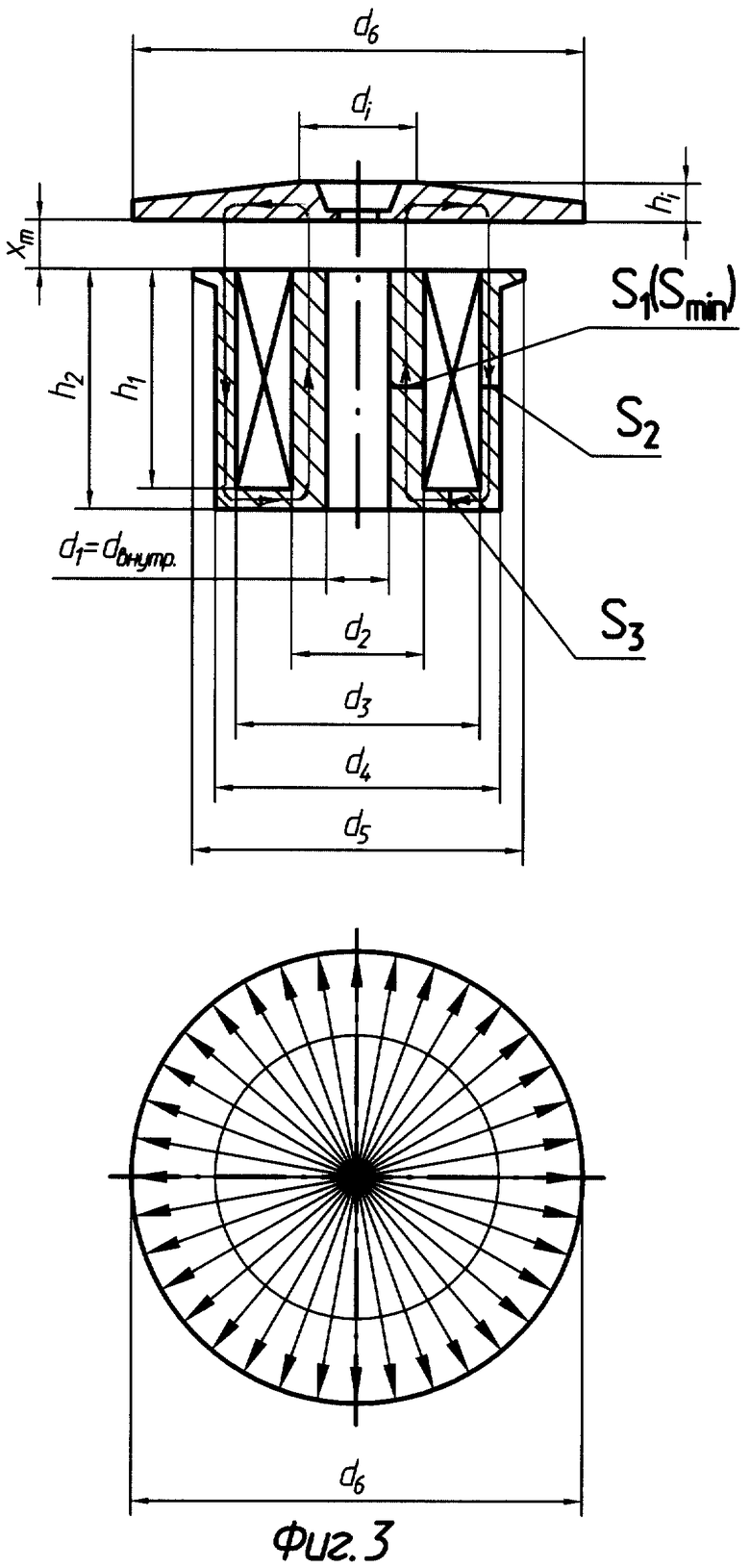
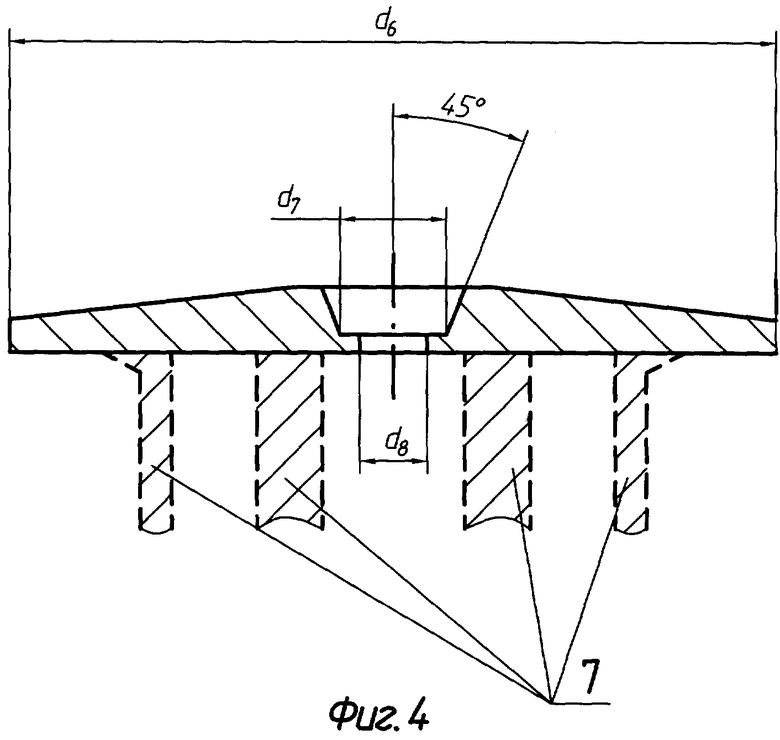
На фиг.3 приведена схема распределения силовых линий магнитного поля, создаваемого обмоткой управления, в якоре и магнитопроводе, на фиг.4 - конструкция якоря переменной толщины (пунктиром отмечено положение полюсов магнитопровода).
Для обеспечения максимального тягового усилия электромагнита пневмораспределителя, а следовательно, максимального быстродействия (минимального времени срабатывания якоря при движении с упора на упор) и возможности работы при более высоких давлениях сжатого воздуха, снижения электропотребления, магнитный поток, создаваемый обмоткой управления электромагнита, должен проходить без потери намагничивающей силы на участках магнитной цепи, определяемых железом магнитопровода и якоря при минимальной массе якоря.
Выполнение этого условия связано с увеличением и причем существенным, поперечных сечений якоря и магнитопровода в местах прохождения магнитного потока. Увеличение сечений железа приводит к росту массы и габаритов электромагнита, что не всегда допустимо для применения такого электромагнита в пневматических рулевых приводах малогабаритных управляемых снарядов и ракет. Это с одной стороны. С другой стороны, чем меньше масса подвижного якоря электромагнита, тем лучше его динамика, что является немаловажным фактором обеспечения высокого быстродействия и точности пневматического рулевого привода. То есть конструктору приходится решать противоречивую техническую задачу в условиях ограничений по массе, габаритам и электропотреблению применительно к малогабаритным управляемым снарядам и ракетам комплексов высокоточного управляемого вооружения, что сделано в предлагаемом техническом решении, в котором авторам удалось реализовать принцип разумной достаточности сечения железа в элементах магнитной цепи электромагнита для обеспечения этого противоречивого условия.
Это обеспечивается следующим образом. За основу построения рациональной магнитной цепи с точки зрения обеспечения электромагнитом максимального тягового усилия, повышения быстродействия, уменьшения электропотребления, уменьшения массы и габаритов принято минимально допустимое для создания максимального тягового усилия поперечное сечение железа внутреннего полюса магнитопровода электромагнита, охватываемого обмоткой управления электромагнита (сечение S1 на фиг.3). Все остальные сечения элементов магнитной цепи (сечения S2 и S3 на фиг.3), в том числе и якоря  в i-том поперечном цилиндрическом сечении
в i-том поперечном цилиндрическом сечении  на фиг.3),в местах прохождения основного магнитного потока, создаваемого обмоткой управления, от полюса до полюса выполнены равными или несколько большими, но близкими сечению S1. То есть, как следует из фиг.3, обеспечивается равенство площадей сечений по полюсам (сечения S1, S2) и дну (сечение S3) магнитопровода и якоря (сечение
на фиг.3),в местах прохождения основного магнитного потока, создаваемого обмоткой управления, от полюса до полюса выполнены равными или несколько большими, но близкими сечению S1. То есть, как следует из фиг.3, обеспечивается равенство площадей сечений по полюсам (сечения S1, S2) и дну (сечение S3) магнитопровода и якоря (сечение  в местах прохождения магнитного потока от полюса до полюса
в местах прохождения магнитного потока от полюса до полюса
Исходя из этого понятно, почему толщина стенки внутреннего и внешнего полюсов электромагнита разная, чем дальше от продольной оси магнитопровода, чем тоньше стенка (фиг.1, 2, 4). Это касается также и якоря электромагнита, его толщина должна быть различной, наибольшей над внутренним полюсом и наименьшей над внешним. Пренебрежение конструктора-разработчика этим условием и выполнение якоря постоянной толщины, как в известных источниках информации [6, 9, 11, 12], приводит или к существенному завышению массы якоря, если он выполнен толщиной, достаточной (вариант 1) для пропускания без ограничения основного магнитного потока в критическом месте (над внутренним полюсом), или к существенному уменьшению тягового усилия электромагнита и увеличению электропотребления, если якорь выполнен (вариант 2) для значительного уменьшения его массы (как подвижного элемента электромагнита) меньшей толщины, например, с сечением, равным сечению S2 внешнего полюса магнитопровода. Но при этом будет проявляться ограничение магнитного потока в другом критическом месте (над внутренним полюсом) и расти электропотребление электромагнита для обеспечения тягового усилия.
На примере магнитопровода (фиг.3) с размерами:
d1=5,5 мм; d2=12 мм; d3=22 мм; d4=24 мм;
d5=23 мм; h1=12 мм; h2=14 мм известных электромагнитов [6, 11, 12] с якорем постоянной толщины и площадью поперечных сечений магнитопровода по полюсам и дну магнитопровода (фиг.4), равными величинам
S1=89,5 мм2
S2=72,2 мм2
S3=75,5 мм2,
проведена оценка площади поперечного цилиндрического сечения якоря, над внутренним  и внешним
и внешним  полюсами магнитопровода для якоря толщиной h=1,0 мм. Получено
полюсами магнитопровода для якоря толщиной h=1,0 мм. Получено
 =27,4 мм2
=27,4 мм2
 =72 мм2.
=72 мм2.
Видно, что при выполнении якоря постоянной толщины h=1,0 мм в известном пневмораспределителе [12] наблюдается, сильное ограничение (в 2,6 раза) магнитного потока в якоре над внутренним полюсом магнитопровода ( =27,4 мм2 и S2=72,2 мм2) и использование потока без ограничения в якоре над внешним полюсом магнитопровода (
=27,4 мм2 и S2=72,2 мм2) и использование потока без ограничения в якоре над внешним полюсом магнитопровода ( =72 мм2 и S2=72,2 мм2). Ограничение магнитного потока в якоре приводит к уменьшению тягового усилия электромагнита и к увеличению времени срабатывания, то есть к уменьшению быстродействия электромагнита и к увеличению электропотребления. Для исключения ограничения магнитного потока в якоре для рассматриваемого примера видно, что толщину якоря необходимо увеличить в 2,6 раза, что приведет к соответствующему существенному увеличению массы якоря в 2,6 раза при избыточном и ненужном для нормальной работы электромагнита увеличении сечения якоря над внешним полюсом электромагнита.
=72 мм2 и S2=72,2 мм2). Ограничение магнитного потока в якоре приводит к уменьшению тягового усилия электромагнита и к увеличению времени срабатывания, то есть к уменьшению быстродействия электромагнита и к увеличению электропотребления. Для исключения ограничения магнитного потока в якоре для рассматриваемого примера видно, что толщину якоря необходимо увеличить в 2,6 раза, что приведет к соответствующему существенному увеличению массы якоря в 2,6 раза при избыточном и ненужном для нормальной работы электромагнита увеличении сечения якоря над внешним полюсом электромагнита.
Ограничение магнитного потока за счет толщины дна магнитопровода снимается или увеличением толщины дна магнитопровода при конструировании электромагнита, или выполнением дна магнитопровода переменной толщины (толще к центру магнитопровода и тоньше к наружному краю).
Увеличенное тяговое усилие электромагнита позволяет обеспечить не только работу электромагнита, а следовательно, и пневматического привода в целом, при больших давлениях сжатого воздуха, но и повысить при этом быстродействие электромагнита и тем самым повысить быстродействие и точность работы привода.
Для справки с магнитопроводом (фиг.3) с приведенными выше размерами экспериментальная проверка в статике электромагнита по усилию отрыва при заданном постоянном токе (I=1A) в обмотке управления при нулевом зазоре от залипания с якорем постоянной толщины h=1,0 мм показала, что усилие отрыва составляет ~5,0 кг. При толщине якоря h=2,0 мм усилие отрыва составляет ~8,0 кг, но при вдвое меньшем токе в обмотке (I=0,5 А). Видно, что при уменьшении ограничения магнитного потока в якоре за счет увеличения толщины якоря и уменьшения его магнитного сопротивления удается обеспечить даже несколько большее максимальное тяговое усилие электромагнита, при существенно меньшем электропотреблении, что очень важно.
Таким образом, проявление отрицательного эффекта ограничения магнитного потока в якоре очевидно как из физических предпосылок, так и подтверждено экспериментально.
Конструкция якоря переменной толщины, определяемой из соотношения 
где hi, di - высота и диаметр i-го поперечного цилиндрического сечения якоря;
Smin - площадь минимального поперечного сечения магнитопровода электромагнита по цепи основного магнитного потока, создаваемого обмоткой управления электромагнита, приведена на фиг.4.
Для справки экспериментальная проверка электромагнита с исходным якорем постоянной толщины h=1,4 мм и якорем переменной толщины (фиг.4) по усилию отрыва при одном и том же ненулевом зазоре от залипания (Δ=0,05 мм) показала, что исходный электромагнит имеет усилие отрыва около 5,5 кг при токе 1A, предлагаемый не менее 8,5 кг при том же токе 1A, то есть усилие отрыва увеличивается в 1,55 раза. Это при практически одинаковых массах якорей (~8,5 г). Диаметр якоря в обоих случаях d6=34,6 мм.
В табл.1 приведены для справки экспериментальные данные по результатам замеров усилия отрыва с якорем постоянной толщины h=1,4 мм и якорем переменной толщины (для 4-х якорей) для электромагнитов с сопротивлением обмотки управления Roу=24 Ом при t=+20°С и числом витков обмотки W=845 витков, при следующих размерах магнитопровода (фиг.3): d1=5,5 мм; d2=12 мм; d3=22 мм; d4=24 мм; d5=26 мм; h1=12 мм; h2=14 мм. Якоря в обоих вариантах выполнены с 3-мя отверстиями диаметром d=4,5 мм, расположенными равномерно на торцевой поверхности якоря на окружности диаметром d=18 мм, и 3-мя отверстиями полуцилиндрической формы диаметром d=6 мм, расположенными равномерно по периметру якоря со смещением на 60° относительно отверстий цилиндрической формы, для прохождения винтов крепления опоры якоря к корпусу пневмораспределителя (на фиг.1-4 эти отверстия не показаны, чтобы не затенять чертеж).
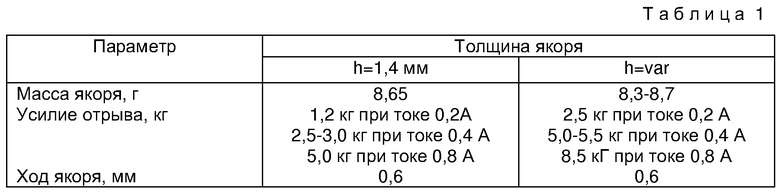
Видно, что при практически одинаковой массе якорей усилие отрыва с якорем переменной толщины (h=var) существенно возросло (~ в 2 раза). Получено 5,0-5,5 кг при токе 0,4 А с предлагаемым якорем переменной толщины вместо 5,0 кг при вдвое большем токе (0,8 А) с исходным якорем постоянной толщины. Увеличение тока наблюдается непропорционально росту усилия отрыва (получено 8,5 кг при токе 0,8 А вместо ожидаемого 10,0-11,0 при пропорциональном изменении), что связано с проявляющимся ограничением магнитного потока в якоре, в котором критическое сечение якоря в районе отверстий диаметром d=4,5 мм составляет 42 мм2 вместо не менее 72,2 мм2 в других поперечных сечениях якоря как над полюсами, так и между ними (Smin=72,2 мм2 было выбрано для принятого магнитопровода фиг.3). Тем не менее уменьшение электропотребления очевидное и существенное, что очень важно для управляемых снарядов и ракет с автономными бортовыми источниками электропитания, например, в виде термоэлектролитических батарей. Это техническое решение позволяет уменьшить число батарей на борту или обеспечить электропитанием при полете управляемого снаряда и ракеты на большую дальность полета при том же количестве батарей.
Блок рулевого привода работает следующим образом. Сжатый воздух давлением под РИ от набегающего потока при полете ракеты из области высокого давления поступает в силовые цилиндры 3 (СЦ1 и СЦ2) через входные отверстия 16. При отсутствии управляющего сигнала якоря 6 (Я1 и Я2) пружинами 22 отжаты от магнитопровода 7, образуя зазор 23, через который выходит воздух. Разница давлений в полостях 24 силовых цилиндров 3 равна нулю, и рули 1 находятся в нулевом положении при действии на рулях нагрузки пружинного типа. При подаче управляющего сигнала в одну из обмоток управления 5 (ОУ1 и ОУ2) якорь 6 (Я1 или Я2) притягивается к магнитопроводу 7, закрывая выходной зазор 23, и за счет разницы давлений в полостях 24 силовых цилиндров 3 (СЦ1, СЦ2) происходит перемещение поршня 9 на ход ХП и через штоки 8 и ось 2 поворот рулей 1 на угол δр.
Предлагаемый воздушно-динамический блок рулевого привода управляемого снаряда за счет введения якоря переменной толщины в электромагните пневмораспределителя позволил значительно повысить тяговое усилие электромагнита и тем самым увеличить быстродействие электромагнитного пневмораспределителя клапанного типа для пневмоприводов при значительном при этом снижении потребляемой электрической мощности практически без увеличения массы и габаритов пневмопреобразователя.
В табл.2 приведены параметры предлагаемого электромагнитного пневмораспределителя клапанного типа с якорем переменной толщины для воздушно-динамического блока рулевого привода управляемого снаряда и известного блочного АЭМП К96.484-006 с якорем постоянной толщины [9, с.35-38, рис.11; таблицы 3-5 блочный АЭМП К96.484-006].
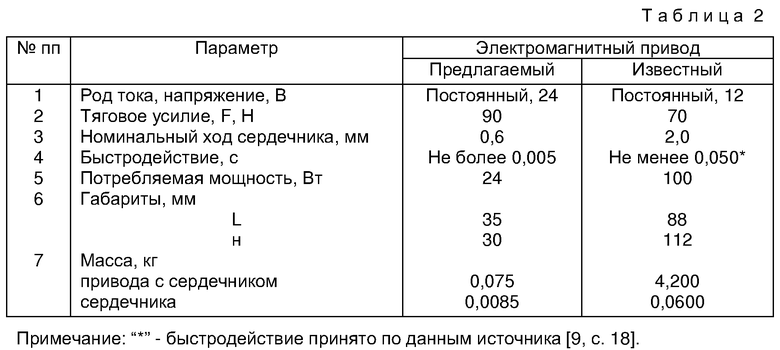
Из анализа данных табл.2 видно, что по быстродействию (время срабатывания не более 0,005 с), по масоогабаритным показателям (масса пневмораспределителя с электромагнитным приводом 75 г, габариты (диаметр 35 мм высота 30 мм), по электропотреблению (не более 24 Вт) электромагнитный привод с якорем переменной толщины далеко опережает известный. Это позволило обеспечить его применение в пневмоприводах систем управления летательных аппаратов и, в частности, в воздушно-динамическом блоке рулевого привода малогабаритного управляемого снаряда.
Проведенные проверки опытных образцов пневмопреобразователя с якорем переменной толщины как автономно, так и в составе воздушно-динамического блока рулевого привода управляемого снаряда подтвердили с положительными результатами эффективность заложенного технического решения.
Очевидно, что предлагаемое техническое решение может быть применено также не только в рулевых приводах, но также как при модернизации, например, известных электромагнитных приводов [9] трубопроводной арматуры, так и при разработке вновь создаваемых.
Таким образом, предлагаемое техническое решение позволяет повысить технические возможности воздушно-динамических рулевых приводов управляемых малогабаритных снарядов и ракет путем увеличения дальности управляемого полета при увеличенных скоростях полета за счет существенной экономии электропотребления и увеличения тягового усилия электромагнита, повысить быстродействие и точность работы привода в составе снаряда за счет увеличения быстродействия электромагнита пневмопреобразователя и расширить возможности практического применения в других областях, связанных с применением аналогичных электромагнитных приводов с подвижным якорем.
Источники информации
1. Автоколебательный рулевой привод управляемого снаряда 9М117. Выстрел ЗУБК10 с управляемым снарядом 9M117. Техническое описание и инструкция по эксплуатации ЗУБК 10.00.00.000 ТO. М.: Военное издательство, 1987.
2. А.Шипунов, В.Дудка, В.Фимушкин, Б.Никаноров. Рулевой привод для ракет комплексов высокоточного оружия, "Военный парад", 1(37), 2000.
3. В.С.Фимушкин. Разработка воздушно-динамических рулевых приводов. Известия Тульского Государственного университета. Серия - Вычислительная техника. Автоматика. Управление. Том 3. Выпуск 3. Управление. Тульский государственный университет. Тула. 2001.
4. Шипунов А.Г., Фимушкин B.C., Никаноров Б.А. Пневмогидроавтоматика-99. Всероссийская конференция. Тезисы докладов. Институт проблем управления им. В.А.Трапезникова. М., 1999.
5. Шипунов А.Г., Фимушкин В.С., Никаноров Б.А. Системный подход к проектированию, конструированию и экспериментальной отработке воздушно-динамических рулевых приводов. Известия Тульского государственного университета. Серия - Проблемы специального машиностроения. Выпуск 2. Материалы региональной научно-технической конференции. Материалы докладов. "Проблемы проектирования и производства систем и комплексов". Тула, 1999.
6. Патент RU 2172927 C1, 27.08.2001, МПК 7 F 42 B 15/01, В 64 С 13/36.
7. Известия Тульского государственного университета. Серия - Проблемы специального машиностроения. Выпуск 4 (4.2) Материалы международной научно-технической конференции. "Проблемы проектирования и производства систем и комплексов". Тула, 2001.
8. Пневмопривод систем управления летательных аппаратов. /В.А.Чащин, О.Г.Гамкрелидзе, А.Б.Кондратьев и др. М.: Машиностроение, 1987.
9. Щучинский С.X. Электромагнитные приводы исполнительных механизмов. М.: Энергоатомиздат, 1984.
10. Гордон А.В., Сливинская А.Г. Электромагниты постоянного тока. М-Л.: Госэнергоиздат, 1960.
11. Патент RU 2117979 C1, 20.08.1998, МПК 6 G 605 D 16/00, F 01 L 9/04.
12. Патент RU 2112149 C1, 27.05.1998, МПК 6 F 01 L 9/04.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2234670C2 |
| ЭЛЕКТРОМАГНИТНЫЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2283472C1 |
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2309084C1 |
| СПОСОБ СНИЖЕНИЯ ПОТРЕБЛЯЕМОЙ ЭЛЕКТРИЧЕСКОЙ МОЩНОСТИ БЫСТРОДЕЙСТВУЮЩЕГО РАСПРЕДЕЛИТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2329412C1 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2206058C1 |
| ПНЕВМОСТЕНД ДЛЯ НАСТРОЙКИ И ПРОВЕРОК ЭЛЕКТРОМАГНИТНЫХ ПНЕВМОРАСПРЕДЕЛИТЕЛЕЙ КЛАПАННОГО ТИПА ДЛЯ ПНЕВМОПРИВОДОВ | 1997 |
|
RU2117979C1 |
| СПОСОБ ПОВЫШЕНИЯ БЫСТРОДЕЙСТВИЯ НЕЙТРАЛЬНЫХ ЭЛЕКТРОМАГНИТОВ И НЕЙТРАЛЬНЫЙ ЭЛЕКТРОМАГНИТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2218624C2 |
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2008 |
|
RU2370727C1 |
| ПНЕВМОРАСПРЕДЕЛИТЕЛЬ | 1999 |
|
RU2164633C1 |

Изобретение относится к оборонной технике, к управляемым снарядам и ракетам. В воздушно-динамическом блоке рулевого привода управляемого снаряда, содержащем рули и рулевые машины с электромагнитным пневмораспределителем клапанного типа, включающим в себя электромагнит с подпружиненным якорем, служащим одновременно клапаном, якорь выполнен переменной толщины, определяемой из соотношения hi=Smin/πdi, где di, hi -диаметр i-го поперечного сечения якоря, перпендикулярного его оси и толщина якоря до плоскости данного сечения; Smin - площадь минимального поперечного сечения магнитопровода электромагнита по цепи основного магнитного потока, создаваемого обмоткой управления электромагнита. Достигается повышение тягового усилия и быстродействия электромагнитного преобразователя клапанного типа для пневмоприводов при снижении потребляемой электрической мощности в условиях ограничения по массе и габаритам малогабаритных управляемых снарядов и ракет, повышение быстродействия и точности работы привода. 4 ил., 2 табл.
Воздушно-динамический блок рулевого привода управляемого снаряда, содержащий рули и рулевые машины с электромагнитным пневмораспределителем клапанного типа, включающим в себя электромагнит с подпружиненным якорем, служащим одновременно клапаном, отличающийся тем, что якорь выполнен переменной толщины, определяемой из соотношения

где di, hi - диаметр i-го поперечного сечения якоря, перпендикулярного его оси, и толщина якоря до плоскости данного сечения;
Smin - площадь минимального поперечного сечения магнитопровода электромагнита по цепи основного магнитного потока, создаваемого обмоткой управления электромагнита.
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| ДВУХКАНАЛЬНЫЙ ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2121648C1 |
| РАКЕТА, СТАБИЛИЗИРОВАННАЯ ВРАЩЕНИЕМ | 1996 |
|
RU2104470C1 |
| US 5423497 А, 13.06.1995 | |||
| СПОСОБ КРЕПЛЕНИЯ ЛИСТОВ ФАЛЬЦЕВОЙ КРОВЛИ | 2005 |
|
RU2284397C1 |
| DE 4438010 А, 02.05.1996. | |||

