Изобретение относится к силовым системам управления управляемых снарядов и ракет и может быть использовано в быстродействующих рулевых приводах, работающих в релейном режиме.
Известны силовые системы управления летательных аппаратов с аэродинамическими рулями [1. Костин С.В., Петров Б.И., Гамынин Н.С. "Рулевые приводы", рис.2.2-2.7. Москва, Машиностроение, 1973 г.].
Силовые системы управления преобразуют маломощные сигналы управления в механические перемещения аэродинамических рулей. Они содержат пневмоприводы статического или динамического действия, управляющие электромагниты и бортовые источники рабочего тела. Для связи исполнительных двигателей с рулями в них предусмотрена кинематическая передача от поршней исполнительных двигателей к оси рулей.
Основными недостатками этих силовых систем управления являются сложность конструкции, потребность в уплотнительных устройствах, малое время работы и разброс динамических характеристик по быстродействию.
Известен воздушно-динамический рулевой привод [2. "Выстрел ЗУБК10 с управляемым снарядом 9М117". Техническое описание и инструкция по эксплуатации. Раздел 6.1. Блок рулевого привода, стр.19-27, Москва, Военное издательство, 1987 г.] управляемого снаряда, принятый за прототип, в котором частично устранены указанные недостатки. В нем вместо бортового источника рабочего тела используется энергия встречного скоростного напора воздуха, поступающего в рулевой привод через носовое воздухозаборное отверстие в обтекателе. Поперечно расположенный корпус делит полость обтекателя на зону высокого и низкого давления. При этом каждый канал управления содержит два исполнительных двигателя одностороннего действия, соединенных с осью рулей посредством коромысла. При этом плечи коромысел равны расстоянию от оси рулей до оси исполнительных двигателей. Управляющие электромагниты управляют работой клапанных распределителей, соединяющих рабочие полости исполнительных двигателей с зонами высокого и низкого давления.
Данный рулевой привод работает следующим образом. При полете снаряда набегающий поток воздуха создает избыточное давление в зоне высокого давления и проходит в открытые рабочие полости исполнительных двигателей с закрытыми выходами клапанных распределителей. На обмотки управляющих электромагнитов приходят управляющие импульсы напряжений. В пневмоприводе с включенной обмоткой электромагнита закрывается вход в рабочую полость и она соединяется с зоной низкого давления. На поршнях исполнительного двигателя одного канала создается перепад давлений, который разворачивает поршни и через коромысла рули в крайнее положение. При приходе управляющего напряжения на второй электромагнит и сбросе напряжения с первого происходит разворот рулей в другое крайнее положение. При этом развиваемый момент исполнительного двигателя пропорционален перепаду давлений и длине плеча коромысла от оси рулей до оси цилиндра. Перепад давлений пропорционален давлению в зоне высокого давления, а последнее пропорционально квадрату скорости полета снаряда. Таким образом, развиваемый момент, мощность и быстродействие зависят от скорости полета снаряда и меняются по времени полета последнего, что не всегда допустимо. Недостатком также будет и достаточная сложность устройства данного рулевого привода.
Задачей предлагаемого изобретения является упрощение конструкции рулевого привода управляемого снаряда и повышение стабильности его динамических характеристик.
Это достигается тем, что в рулевом приводе управляемого снаряда, содержащем два исполнительных двигателя одностороннего действия, соединенные с осью рулей посредством коромысла, исполнительные двигатели выполнены в виде закрепленных рядом на основании втяжных электромагнитов с якорями, снабженными штоками с концевыми наконечниками, выполненными в виде серьги с отверстием под шарнир, смещенным в перпендикулярном направлении относительно осевой линии штока, при этом наконечники и коромысло шарнирно соединены так, что длина плеча коромысла до шарнира меньше половины наружного диаметра корпуса втяжного электромагнита.
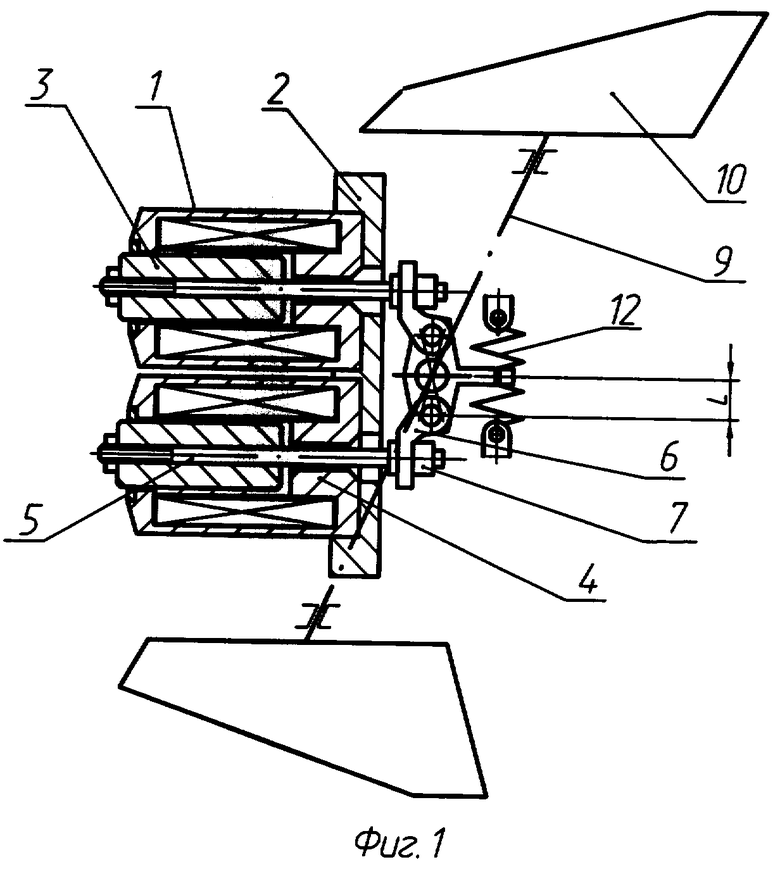
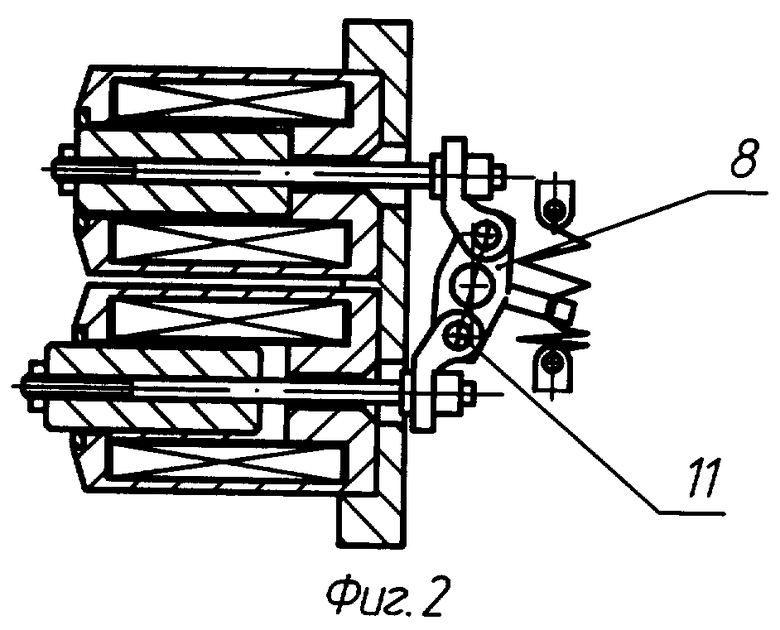
Конструктивная схема предлагаемого рулевого привода представлена на фиг.1, 2. Рулевой привод содержит два втяжных электромагнита 1, закрепленных рядом на основании 2, каждый с якорем 3 и полюсом 4. В якорь ввернут шток 5 с серьгой 6, закрепленной гайкой 7. Каждая серьга шарнирно соединена с коромыслом 8, установленным на оси 9 руля 10, штифтом 11. Отверстие под штифт в серьге смещено в сторону, перпендикулярно осевой якоря со штоком, серьги установлены так, чтобы обеспечить равные и наименьшие величины рабочих плеч L коромысла 8, т.е. меньше половины диаметра цилиндрического корпуса электромагнита. Якорь в электромагните имеет подвижную посадку, обеспечивающую ему также небольшую угловую прокачку. Якоря могут быть подпружинены, например, пружинами 12. В итоге, данная схема позволяет обеспечить небольшой рабочий ход якоря электромагнита при значительных углах поворота аэродинамических рулей и, что важно, компактность устройства и небольшую массу.
Устройство работает следующим образом.
При полете снаряда на обмотки электромагнитов поочередно поступают управляющие импульсы напряжений. В электромагните с включенной обмоткой якорь 3 притягивается к полюсу 4 и через шток с серьгой 6 разворачивает коромысло 8 и ось с рулем 10 в крайнее положение. При подаче импульса напряжения на другую обмотку руль разворачивается в другую сторону. По разности времени нахождения руля на упорах определяется результирующий аэродинамический момент для управления снарядом. При отсутствии напряжения на обмотках электромагнитов руль отжимается потоком воздуха и пружиной в среднее положение. Так как развиваемое усилие и соответственно развиваемый момент электромагнитного привода увеличивается по мере приближения якоря к полюсу, целесообразно максимально уменьшить ход якоря, не изменяя угол поворота руля. В предлагаемом приводе это реализуется уменьшением длины плеча коромысла путем установки на шток якоря электромагнита наконечника в виде серьги с отверстием под шарнир, смещенным относительно осевой штока, что позволило при небольшом рабочем ходе якоря получить значительные углы поворота руля. В реальной конструкции, ход якоря - 1,2 мм, угол поворота руля 14°. Небольшой ход якоря также приводит к незначительной угловой прокачке при его осевом перемещении, что позволило применить в электромагнитном приводе втяжные электромагниты, обладающие среди прочих типов наилучшими динамическими характеристиками и простотой конструкции. Стабильность характеристик данного рулевого привода значительно выше, чем у прототипа, так как зависит в основном от напряжения в бортовой сети, которое мало меняется от времени полета снаряда.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМЫЙ СНАРЯД И РУЛЕВАЯ МАШИНА ДЛЯ НЕГО | 2000 |
|
RU2184927C1 |
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2309084C1 |
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2000 |
|
RU2167386C1 |
| СПОСОБ НАСТРОЙКИ РУЛЕВОГО ПРИВОДА ЛЕТАТЕЛЬНОГО АППАРАТА И ЭЛЕКТРОМАГНИТНЫЙ БЛОК РУЛЕВОГО ПРИВОДА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2291383C1 |
| ЭЛЕКТРОМАГНИТНЫЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2283472C1 |
| Управляемый снаряд, блок рулевого привода управляемого снаряда, пневмораспределительное устройство рулевого привода управляемого снаряда, механизм инициирования рулевого привода управляемого снаряда | 2017 |
|
RU2669979C1 |
| СПОСОБ СБОРКИ РУЛЕВОЙ МАШИНЫ УПРАВЛЯЕМОГО СНАРЯДА И СПОСОБ ПРОВЕРКИ ГЕРМЕТИЧНОСТИ ПНЕВМОЗАТВОРА | 2002 |
|
RU2235285C2 |
| Блок рулевого привода управляемого снаряда | 2024 |
|
RU2825869C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И БЛОК РУЛЕВОГО ПРИВОДА (ВАРИАНТЫ) | 2005 |
|
RU2288439C1 |
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2234670C2 |
Изобретение относится к управляемым снарядам. В частности, к устройствам их рулевых приводов. Рулевой привод управляемого снаряда содержит два исполнительных двигателя одностороннего действия, соединенные с осью рулей посредством коромысла. Исполнительные двигатели выполнены в виде закрепленных рядом на основании втяжных электромагнитов с якорями, снабженными штоками с концевыми наконечниками. Последние выполнены в виде серьги с отверстием под шарнир, смещенным в перпендикулярном направлении относительно осевой линии штока. Наконечники и коромысло шарнирно соединены таким образом, что длина плеча коромысла до шарнира меньше половины наружного диаметра корпуса втяжного электромагнита. Обеспечивается повышение стабильности динамических характеристик рулевого привода и упрощение конструкции. 2 ил.
Рулевой привод управляемого снаряда, содержащий два исполнительных двигателя одностороннего действия, соединенные с осью рулей посредством коромысла, отличающийся тем, что исполнительные двигатели выполнены в виде закрепленных на основании втяжных электромагнитов с якорями, снабженными штоками с концевыми наконечниками, выполненными в виде серьги с отверстием под шарнир, смещенным в перпендикулярном направлении относительно осевой линии штока, при этом наконечники и коромысло шарнирно соединены таким образом, что длина плеча коромысла до шарнира меньше половины наружного диаметра корпуса втяжного электромагнита.
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| ТЕХНИЧЕСКОЕ ОПИСАНИЕ И ИНСТРУКЦИЯ ПО ЭКСПЛУАТАЦИИ | |||
| - М.: ВОЕННОЕ ИЗДАТЕЛЬСТВО, 1987, с.26 | |||
| БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2003 |
|
RU2248519C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И БЛОК РУЛЕВОГО ПРИВОДА (ВАРИАНТЫ) | 2005 |
|
RU2288439C1 |
| БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2149345C1 |
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2000 |
|
RU2167386C1 |
| US 5423497 A, 13.06.1995. | |||

