Изобретение относится к радиотехнике, в частности к адаптивной фильтрации цифровых сигналов, и может найти применение в медицинской визуализации.
Известно устройство и способ для адаптивной фильтрации изображений, основанные на подобии гистограмм (Dong-Chyuan Liu, System and method for adaptive filtering of images based on similarity between histograms. United States Patent, US 005594807A, Jan. 14, 1997). Устройство состоит из процессора и запоминающего устройства, а способ включает в себя вычисление гистограммы амплитуды отраженного зондируемым объектом сигнала, ее сравнение с вычисленной гистограммой амплитуды сигнала, характеризующегося развитой структурой спекл-шумов, сглаживающую фильтрацию амплитуды сигналов в соответствии с результатами сравнения и отображение ее результатов.
Недостатком предложенного способа является искажение и частичная потеря информации о зондируемом объекте. Это вызвано тем, что гистограммы вычисляются в реальном времени по статистически малым выборкам данных, что определяет неустойчивость их оценки, а также характерной для данного способа потерей информации о тех элементах структуры объекта зондирования, статистические признаки которых близки к статистическим признакам спекл-шума.
Кроме того, при сглаживающей фильтрации теряется диагностическая информация, содержащаяся в самих спекл-шумах. С точки зрения медицинской диагностики спекл-шумы могут трактоваться и как шум, и как информативный диагностический сигнал в зависимости от контекста, в котором рассматривается данное изображение. В частности, правильные диагностические выводы могут быть сделаны из особенностей спекл-текстуры изображения. Поэтому при фильтрации часто необходимо удалять только неинформативную часть спекл-шумов, к которой относится, в частности, динамическая составляющей спекл-шума. Под динамической здесь понимается та часть спекл-шумов, которая изменяется при смене кадров в результате микродвижений в области зондирования и микросмещений зондирующего преобразователя.
Известная адаптивная фильтрация для подавления спекл-шумов в ультразвуковых эхо-импульсных и других изображениях (J.C.Bamber, Adaptive filtering for redaction of speckle in ultrasonic pulse-echo and other images, UK Patent application, GB 2168482A, 12 Dec. 1985) реализуется посредством устройства, состоящего из статистического процессора, компаратора и фильтра с переменной полосой пропускания, предназначенного для сглаживания амплитуды сигналов, статистические признаки которых близки к спекл-шумовым.
Недостатком данной адаптивной фильтрации является искажение и частичная потеря информации о зондируемом объекте. Это вызвано тем, что при фильтрации в реальном масштабе времени статистические признаки сигнала вычисляются по статистически малой выборке данных, что определяет неустойчивость их оценки, а также характерной для данного способа потерей информации о тех структурах объекта, статистические признаки которых близки к статистическим признакам спекл-шума. Кроме того, из-за применения сглаживающей фильтрации невозможно сохранение диагностической информации, содержащейся в самих спекл-шумах.
Известно устройство - классификатор сигналов с адаптивной фильтрацией и нейронной сетью (S.J.Engel, Adaptive filtering neural network classifier. United States Patent, US 005761383 A, Jun. 2, 1998), которое состоит из ряда фильтров и классификатора сигналов в виде нейронной сети. Классификация сигналов и адаптивная фильтрация осуществляется посредством фильтрации сигнала рядом полосовых фильтров, после чего информация о результатах фильтрации каждым из полосовых фильтров является основой для классификации сигнала нейронной сетью. По результатам классификации определяются частотные характеристики сигнала и веса для каждого из полосовых фильтров. Адаптивная фильтрация производится путем сложения выходных сигналов фильтров с указанными весами.
Недостатком данного устройства является частичная потеря информации о зондируемом объекте. Это вызвано использованием в устройстве полосовых фильтров, статистическая точность спектральной оценки которых при работе в реальном масштабе времени неустойчива для сигналов с изменяющимися частотными характеристиками. Возможности использования в реальном масштабе времени описываемого классификатора сигналов с адаптивной фильтрацией ограничиваются также большим объемом вычислений, производимых нейронной сетью для достоверной классификации сигнала.
Наиболее близким по техническому решению к предлагаемому способу является способ, изложенный в статье “Байесовское ультразвуковое зондирование объекта с частотным разделением” (J.Saniie, T.Wang, X.Jin., Frequency diverse Bayesian ultrasound flaw detection, IEEE Ultrasonics Symposium Proceedings, 1989, p.1135) и включающий тренировочный процесс для оптимального обнаружения элемента структуры объекта зондирования, задание порога принятия решений, получение посредством фильтрации ряда оценок входного сигнала, отраженного объектом зондирования, вычисление вероятностей различных гипотез относительно типа входного сигнала, вычисление отношений вероятностей и сравнение отношений вероятностей с порогами принятия решений, определение наиболее вероятной гипотезы о типе входного сигнала и отображение результатов цифровой адаптивной фильтрации сигналов.
Способ основан на фильтрации отраженного зондируемым объектом высокочастотного сигнала рядом полосовых фильтров. Полученные на выходе каждого из полосовых фильтров оценки входного сигнала служат для вычисления условных вероятностей того, что сигнал имеет полезную составляющую, содержащую информацию о структуре зондируемого объекта, и того, что сигнал представляет собой сигнал спекл-шума. Сравнение полученных вероятностей с учетом заранее заданного порога принятия решения о том, содержит сигнал информацию о структуре зондируемого объекта или нет, является основанием для последующей фильтрации эхо-сигнала с целью выделения его полезной частотной составляющей, несущей максимум информации о структуре отображаемого объекта.
Недостатком данного способа является частичная потеря информации о зондируемом объекте и невозможность сохранения, при необходимости, диагностически значимой составляющей спекл-шумов. Это вызвано использованием полосовых фильтров, статистическая точность спектральной оценки которых при работе в реальном масштабе времени неустойчива для сигналов с изменяющимися частотными характеристиками, а также характерной для данного способа потерей информации о тех структурах объекта, статистические признаки которых близки к статистическим признакам спекл-шума. Недостатком данного способа является также практическая невозможность его реализации в реальном масштабе времени, поскольку способ требует обработки статистических выборок данных высокочастотного сигнала, отраженного объектом зондирования.
Наиболее близким по техническому решению к предлагаемому устройству является динамический цифровой фильтр, использующий нейронную сеть (D.W.Moses, С.Н.Hustig, J.Kinne, H.L.Najafi, Dynamic digital filter using neural networks, PCT, WO 95/29449, 2 November 1995), содержащий блок цифровой фильтрации, состоящий из цифровых фильтров с различными параметрами, умножителей и сумматора, причем выходы цифровых фильтров соединены со входами умножителей, выходы которых соединены со входом сумматора, выход сумматора является выходом устройства цифровой адаптивной фильтрации сигналов, и блок распознавания, выход которого соединен со вторыми входами умножителей. Недостатком данного динамического цифрового фильтра является частичная потеря информации о зондируемом объекте. Это связано с необходимостью предварительного определения спектрального состава фильтруемого сигнала, статистическая оценка точности которого при работе в реальном масштабе времени неустойчива для сигналов с изменяющимися частотными характеристиками, а также с применением фильтров, частотные характеристики которых оптимальны только для фильтрации периодических и апериодических сигналов. Кроме того, возможности адаптивной фильтрации сигналов в реальном масштабе времени ограничены большим объемом вычислений, производимых для определения спектрального состава сигнала, и большим объемом вычислений, производимых нейронной сетью для достоверной классификации сигнала.
В основу группы изобретений поставлена задача усовершенствования способа цифровой адаптивной фильтрации сигналов и устройства для его выполнения путем анализа вероятностей статистических гипотез относительно типа сигнала по статистическим выборкам данных об амплитуде сигнала, обеспечение подавления шумовой составляющей сигнала в реальном масштабе времени без потери информации о структуре зондируемого объекта, сохранение, при необходимости, диагностической информации, содержащейся в спекл-шумах, и выделение дополнительной информации о структуре зондируемого объекта.
Поставленная задача решается следующим образом.
1. Способ цифровой адаптивной фильтрации сигналов, включающий тренировочный процесс для оптимального обнаружения элемента структуры объекта зондирования, задание порогов принятия решений, вычисление вероятностей различных гипотез относительно типа входного сигнала, вычисление отношений вероятностей и их сравнение с порогами принятия решений, определение наиболее вероятной гипотезы о типе входного сигнала, отличающийся тем, что после задания порогов принятия решений выделяют амплитуду входного сигнала, получают посредством цифровой фильтрации ряд оценок амплитуды входного сигнала, отвечающих различным гипотезам об элементе структуры объекта зондирования и соответствующих им базовым сигналам амплитуды, после определения наиболее вероятной гипотезы о типе входного сигнала проводят оценку значения амплитуды входного сигнала, как взвешенной суммы оценок цифровой фильтрации, определяют наиболее вероятный элемент структуры объекта зондирования и отображают результаты цифровой адаптивной фильтрации сигналов в виде оценки амплитуды входного сигнала, причем количество задаваемых порогов принятия решений определяется числом гипотез относительно типа входного сигнала.
2. Способ цифровой адаптивной фильтрации сигналов по п.1, отличающийся тем, что тренировочный процесс для оптимального обнаружения элементов структуры объекта зондирования включает в себя определение параметров цифровых фильтров, отвечающих различным гипотезам об элементе структуры объекта зондирования, и определение весовых коэффициентов, обеспечивающих оптимальное отображение наиболее вероятного элемента структуры объекта зондирования.
3. Способ цифровой адаптивной фильтрации сигналов по п.1, отличающийся тем, что вычисление вероятностей и вычисление отношений вероятностей выполняют для максимальных значений апостериорных плотностей вероятности и отношений максимальных значений апостериорных плотностей вероятности различных гипотез об элементе структуры объекта зондирования либо для апостериорных вероятностей и отношений апостериорных вероятностей различных гипотез об элементе структуры объекта зондирования.
4. Способ цифровой адаптивной фильтрации сигналов по п.1, отличающийся тем, что отображение результатов цифровой адаптивной фильтрации сигналов осуществляется в виде оценки амплитуды входного сигнала, как взвешенной суммы оценок амплитуды сигнала, соответствующего различным гипотезам об элементе структуры объекта зондирования, либо в виде оценки амплитуды входного сигнала, как взвешенной суммы оценок, и кода наиболее вероятного элемента структуры объекта зондирования.
5. Устройство для цифровой адаптивной фильтрации сигналов, содержащее блок цифровой фильтрации, состоящий из цифровых фильтров с различными параметрами, умножителей и сумматора, причем выходы цифровых фильтров соединены с первыми входами умножителей, выходы которых соединены со входом сумматора, выход сумматора является выходом устройства цифровой адаптивной фильтрации сигналов, и блок распознавания, первый выход которого соединен со вторыми входами умножителей, выходы которых соединены со входом сумматора, выход сумматора является выходом устройства цифровой адаптивной фильтрации сигналов, и блок распознавания, первый выход которого соединен со вторыми входами умножителей, отличающееся тем, что дополнительно содержит детектор амплитуды сигнала, а блок распознавания состоит из статистического процессора, запоминающего устройства и компаратора, причем вход детектора амплитуды сигнала является входом устройства цифровой адаптивной фильтрации сигналов, а выход соединен со входами цифровых фильтров, вторые выходы которых соединены со входом статистического процессора, выход статистического процессора соединен со входом компаратора, первый выход которого соединен со входом запоминающего устройства, а второй выход является вторым выходом устройства цифровой адаптивной фильтрации сигналов, выход запоминающего устройства является первым выходом блока распознавания.
6. Устройство для цифровой адаптивной фильтрации сигналов по п.5, отличающееся тем, что блок цифровой фильтрации содержит М цифровых фильтров, тип каждого из которых оптимален по критерию максимума апостериорной плотности вероятности для фильтрации одного из базовых сигналов амплитуды входного сигнала, соответствующего одной из различных гипотез об элементе структуры объекта зондирования, и М умножителей, причем М≥ 2 и определяется числом базовых сигналов амплитуды входного сигнала.
Заявляемый способ цифровой адаптивной фильтрации сигналов и устройство для его выполнения в известных источниках информации не обнаружены, что позволяет считать их новыми.
Отличительные признаки в своей совокупности являются необходимыми и достаточными для достижения поставленной цели, в других известных технических решениях не выявлены, что обеспечивает группе изобретений соответствие критерию “изобретательский уровень”.
Введение в заявляемое устройство детектора амплитуды входного сигнала, применение в блоке распознавания статистического процессора, запоминающего устройства и компаратора, а также новые связи между элементами устройства позволяют реализовать предложенный способ цифровой адаптивной фильтрации сигналов и тем самым обеспечить подавление шумовой составляющей сигнала в реальном масштабе времени без потери информации о структуре зондируемого объекта, сохранение, при необходимости, диагностической информации, содержащейся в спекл-шумах, и выделение дополнительной информации о структуре зондируемого объекта.
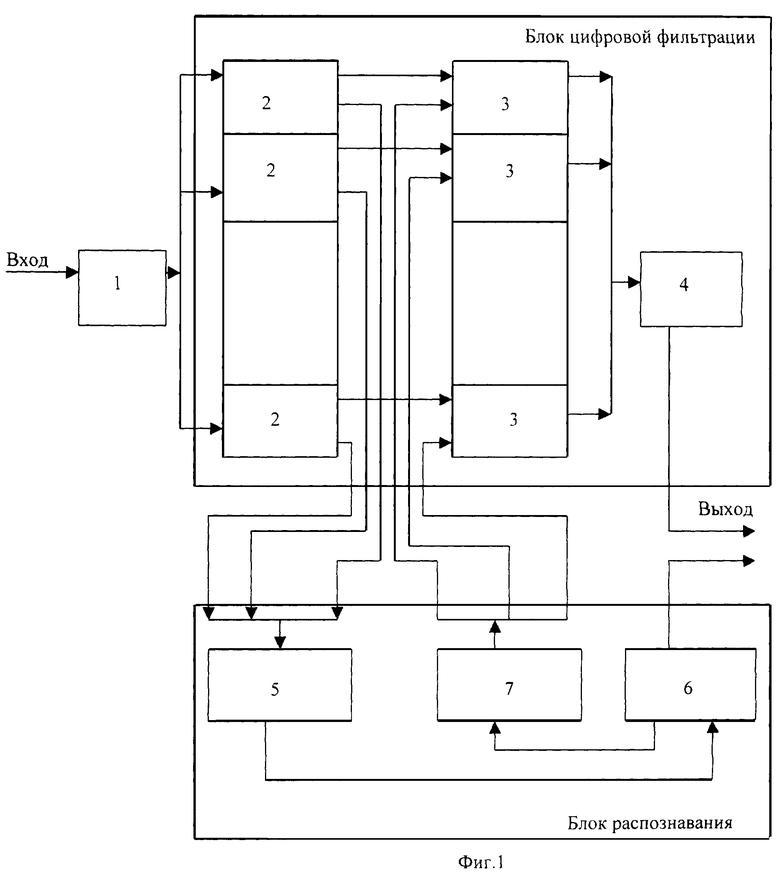
На фиг.1 приведена блок-схема устройства для цифровой адаптивной фильтрации сигналов.
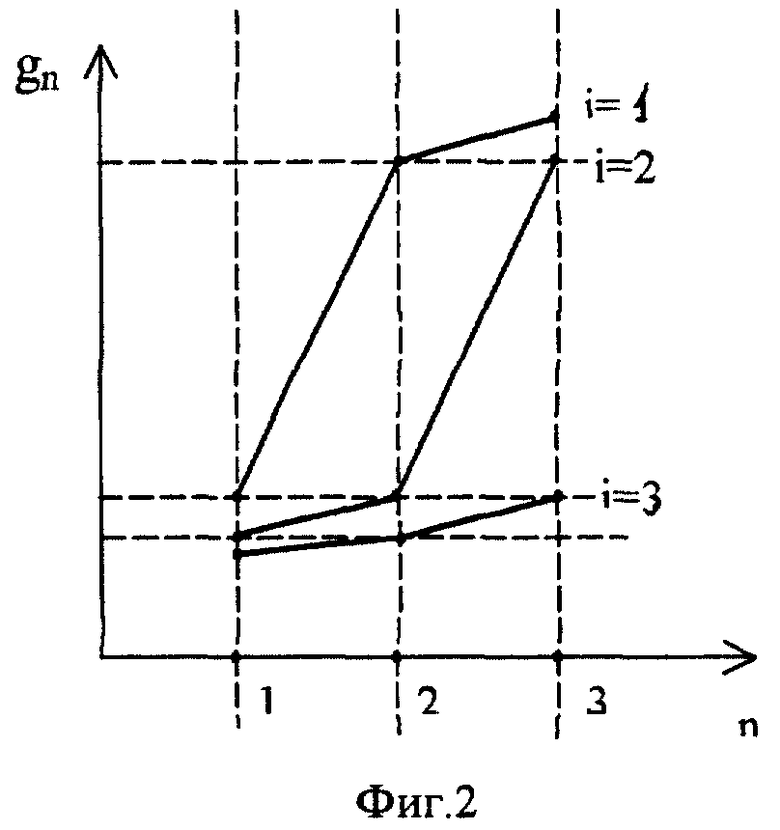
На фиг.2 показан двумерный базовый сигнал амплитуды входного сигнала, отраженного объектом зондирования, при зондировании под углом такого элемента структуры объекта зондирования, как граница раздела двух сред с различными отражающими способностями.
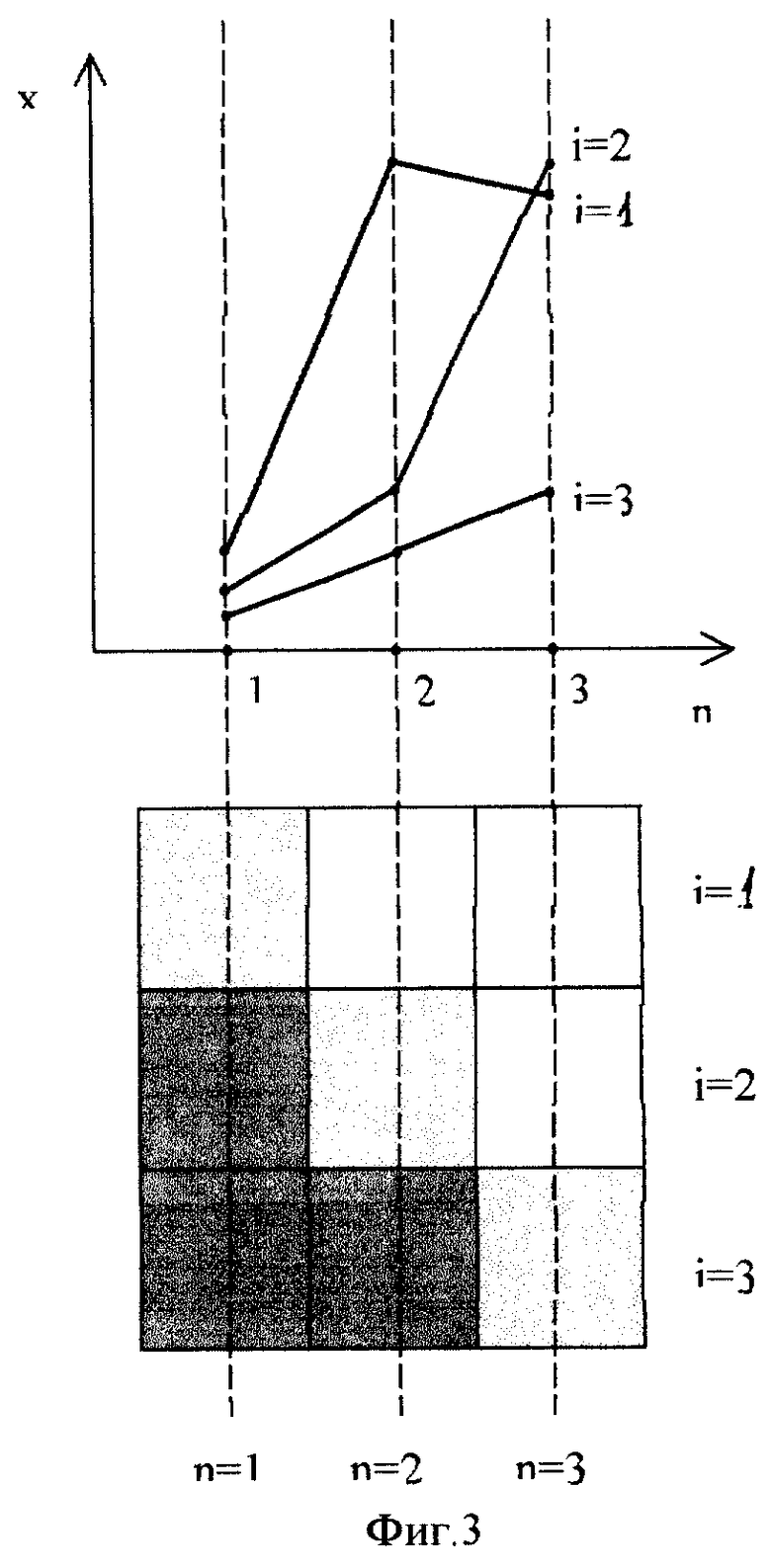
На фиг.3 показаны графики амплитуды входного сигнала при зондировании под углом границы раздела двух сред с различными отражающими способностями.
На фиг.4 показано изображение фрагмента печени и правой почки.
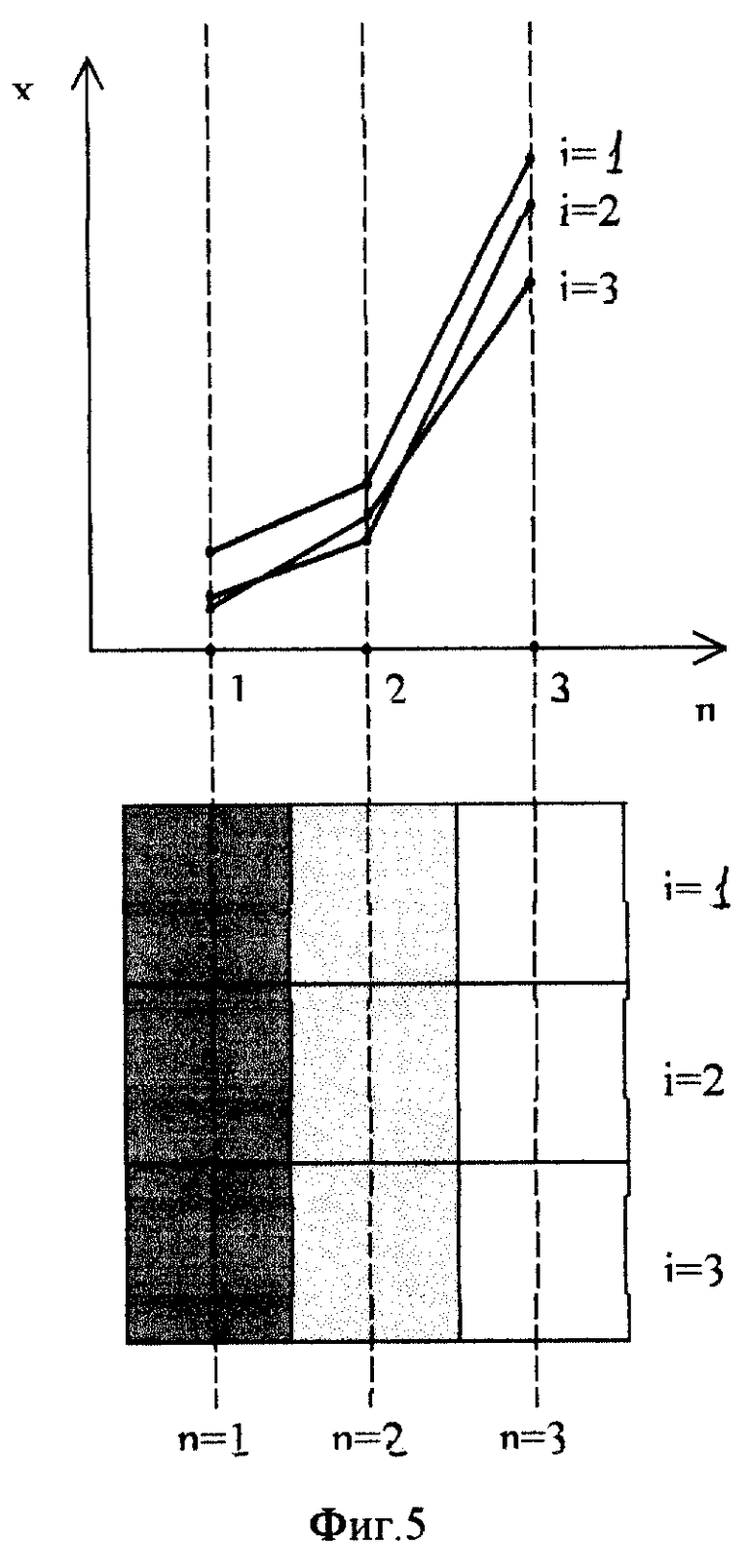
На фиг.5 показаны графики амплитуды входного сигнала при нормальном зондировании границы раздела двух сред с различными отражающими способностями.
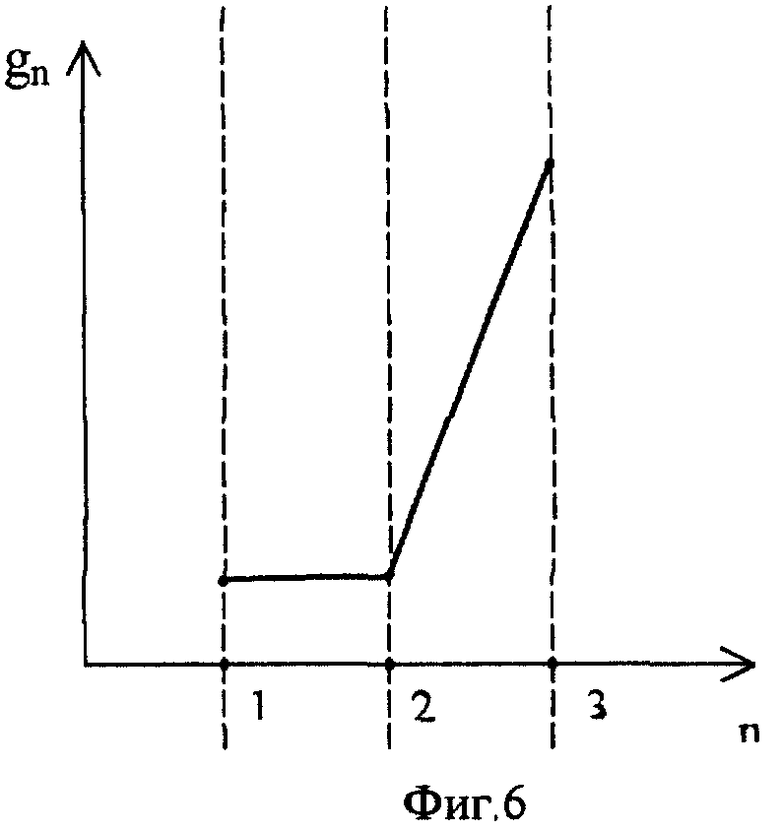
На фиг.6 показан возможный желаемый выходной сигнал амплитуды для границы раздела двух сред при нормальном зондировании.
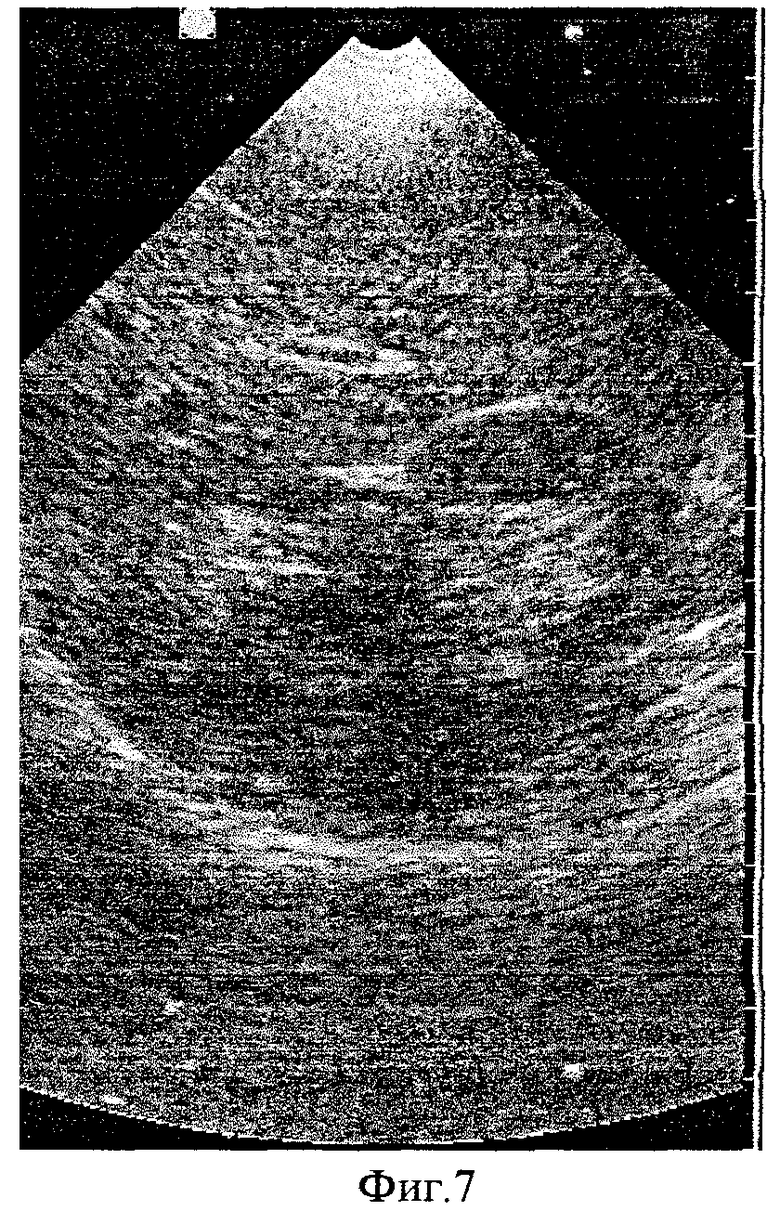
На фиг.7 представлено исходное изображение фрагмента печени и правой почки.
На фиг.8 представлено изображение, полученное после предварительной обработки по предлагаемому способу.
Способ цифровой адаптивной фильтрации сигналов включает в себя выделение амплитуды входного сигнала, получение посредством цифровой фильтрации ряда оценок амплитуды входного сигнала, отвечающих различным гипотезам об элементе структуры объекта зондирования и соответствующих им базовым сигналам амплитуды, проведение тренировочного процесса для оптимального обнаружения элементов структуры объекта зондирования, включающего в себя определение весовых коэффициентов, обеспечивающих оптимальное отображение наиболее вероятного элемента структуры объекта зондирования и определение параметров цифровых фильтров, задание порогов принятия решений, количество которых определяется числом гипотез относительно типа сигнала, отраженного объектом зондирования, вычисление вероятностей различных гипотез относительно типа входного сигнала и вычисление отношений вероятностей, которые выполняются для максимальных значений апостериорных плотностей вероятности либо для апостериорных вероятностей и сравнение отношений с порогами принятия решений, определение наиболее вероятной гипотезы о типе входного сигнала, проведение оценки значения амплитуды входного сигнала, как взвешенной суммы оценок цифровой фильтрации, определение наиболее вероятного элемента структуры объекта зондирования и отображение результатов цифровой адаптивной фильтрации сигналов, которое осуществляется в виде оценки амплитуды входного сигнала, как взвешенной суммы оценок амплитуды сигнала, соответствующих различным гипотезам об элементе структуры объекта зондирования, либо в виде оценки амплитуды входного сигнала, как взвешенной суммы оценок, и кода наиболее вероятного элемента структуры объекта зондирования.
Реализация заявляемого способа цифровой адаптивной фильтрации сигналов осуществляется посредством устройства, представленного на фиг.1 и содержащего детектор амплитуды входного сигнала 1, блок цифровой фильтрации и блок распознавания. Блок цифровой фильтрации состоит из М цифровых фильтров 2, М умножителей 3 и сумматора сигналов 4. Блок распознавания включает в себя статистический процессор 5, компаратор 6 и запоминающее устройство 7.
Вход детектора амплитуды сигнала 1 является входом устройства цифровой адаптивной фильтрации сигналов, а выход детектора амплитуды сигнала 1 соединен со вторым входом блока цифровой фильтрации, которым является вход цифровых фильтров 2, первые выходы которых соединены с первыми входами умножителей 3, вторые выходы цифровых фильтров 2 соединены со входом статистического процессора 5, выход статистического процессора 5 соединен со входом блока распознавания, которым является вход компаратора 6, первый выход которого соединен со входом запоминающего устройства 7, а второй выход является одновременно вторым выходом блока распознавания и вторым выходом устройства цифровой адаптивной фильтрации сигналов, выход запоминающего устройства 7 соединен с первым входом блока цифровой фильтрации, которым являются вторые входы умножителей 3 и является вторым выходом блока распознавания, выходы умножителей 3 соединены со входом сумматора 4, выход сумматора 4 является первым выходом устройства цифровой адаптивной фильтрации сигналов.
Устройство работает следующим образом. В изображенном на фиг.1 устройстве адаптивной фильтрации, основанном на анализе вероятностей статистических гипотез, каждый из цифровых фильтров 2 производит вычисление одной из оценок амплитуды входного сигнала, получаемой на выходе детектора 1, по окну данных x={x1, x2,... , xN}, где хn - цифровые значения амплитуды входного сигнала в окне данных, N - величина окна данных, равная соответственно N1, N1×N2 и N1×N2×N3 при одно-, двух- и трехмерной фильтрации. Количество фильтров и получаемых оценок определяется числом принятых к рассмотрению гипотез о возможных элементах структуры объекта зондирования и соответственно числом базовых сигналов амплитуды. Непосредственный алгоритм нелинейной цифровой фильтрации задается распределением шумов и способом оценки. В частности, если амплитуда сигнала, отраженного зондируемым объектом, описывается распределением Рэлея, как это имеет место при наличии спекл-шумов, то при одномерной нечетной выборке данных (N1=2n1-1) амплитуды сигнала оптимальную по критерию максимума апостериорной плотности вероятности оценку текущего значения отражающей способности с наилучшим подавлением шума для i-го базового сигнала дает нелинейный цифровой фильтр вида

где  - оценка текущего значения амплитуды входного сигнала, произведенная i-м фильтром, Нi - гипотеза, отвечающая i-му элементу структуры объекта зондирования и i-му базовому сигналу,
- оценка текущего значения амплитуды входного сигнала, произведенная i-м фильтром, Нi - гипотеза, отвечающая i-му элементу структуры объекта зондирования и i-му базовому сигналу,  - параметры i-го фильтра. При двух- и трехмерной фильтрации соответствующие выражения отличаются от (1) наличием дополнительных суммирований (Левин Б.Р. Теоретические основы статистической радиотехники. В трех книгах. Книга вторая. Изд. 2-е, перераб. и дополнен. М.: Сов. Радио, 1973, с.98).
- параметры i-го фильтра. При двух- и трехмерной фильтрации соответствующие выражения отличаются от (1) наличием дополнительных суммирований (Левин Б.Р. Теоретические основы статистической радиотехники. В трех книгах. Книга вторая. Изд. 2-е, перераб. и дополнен. М.: Сов. Радио, 1973, с.98).
Совокупность отношений величин  задающих параметры фильтрации в (1), полностью определяют i-й элемент структуры объекта зондирования и могут рассматриваться в качестве независимых параметров фильтра. Эти отношения устанавливаются в процессе тренировки устройства и непосредственно вытекают из отношений соответствующих значений i-го базового сигнала амплитуды, отвечающего i-ому элементу структуры объекта зондирования. Базовый сигнал любого элемента структуры может быть получен путем усреднения множества графиков амплитуды сигналов, полученных при зондировании этого элемента структуры объекта. В частности, двумерный базовый сигнал амплитуды, изображенный на фиг.2, может быть получен путем усреднения множества графиков амплитуды сигнала, один из которых показан на фиг.3.
задающих параметры фильтрации в (1), полностью определяют i-й элемент структуры объекта зондирования и могут рассматриваться в качестве независимых параметров фильтра. Эти отношения устанавливаются в процессе тренировки устройства и непосредственно вытекают из отношений соответствующих значений i-го базового сигнала амплитуды, отвечающего i-ому элементу структуры объекта зондирования. Базовый сигнал любого элемента структуры может быть получен путем усреднения множества графиков амплитуды сигналов, полученных при зондировании этого элемента структуры объекта. В частности, двумерный базовый сигнал амплитуды, изображенный на фиг.2, может быть получен путем усреднения множества графиков амплитуды сигнала, один из которых показан на фиг.3.
Полученные при фильтрации различными фильтрами значения оценок амплитуды сигнала поступают в статистический процессор 5 блока распознавания фиг.1, вычисляющий с их помощью максимальные значения апостериорных плотностей вероятности Рi (Левин Б.Р. Теоретические основы статистической радиотехники. В трех книгах. Книга вторая. Изд. 2-е, перераб. и дополнен. М. Сов. Радио, 1973, с.98) различных базовых сигналов и соответственно элементов структуры объекта зондирования либо апостериорные вероятности. (Левин Б.Р. Теоретические основы статистической радиотехники. В трех книгах. Книга вторая. Изд. 2-е, перераб. и дополнен. М.: Сов. Радио, 1973, с.55).
Вычисленные в статистическом процессоре значения вероятностей поступают в компаратор 6. В компараторе вычисленные вероятности Pi различных элементов структуры объекта зондирования сравниваются и определяется элемент структуры, наиболее вероятный с учетом заданных порогов принятия решений. Отличные от единицы пороги принятия решений, являющиеся параметрами компаратора, используются при наличии данных относительно априорных вероятностей различных элементов структуры зондирования.
Информация о номере элемента структуры объекта зондирования, к которому с наибольшей вероятностью принадлежит текущее значение амплитуды сигнала, передается с выхода компаратора 6 на устройство отображения, например, монитор. Эта дополнительная диагностическая информация может отображаться, например, при помощи цвета.
Порядковый номер наиболее вероятного элемента структуры объекта зондирования определяет порядковый номер одного из фильтров 1, отвечающего этому элементу структуры объекта зондирования. С выхода компаратора 6 порядковый номер фильтра 2 поступает на вход предварительно обученного запоминающего устройства 7. Таким образом, входными данными запоминающего устройства являются не множества значений амплитуды входного сигнала х={х1, х2,... , хN}, а код наиболее вероятного базового сигнала, записанный в виде номера одного из фильтров 2. Каждому базовому сигналу запоминающее устройство ставит в соответствие некоторый вектор весовых коэффициентов  который представляет собой выходные данные запоминающего устройства.
который представляет собой выходные данные запоминающего устройства.
С выхода запоминающего устройства 7, который является и выходом всего блока распознавания, вектор весовых коэффициентов  поступает последовательно на умножители 3, на другой вход которых поступают для перемножения сформированные каждым из цифровых фильтров оценки текущего значения амплитуды входного сигнала (1). Выходы умножителей соединены со входом сумматора 4, где производится суммирование выходных значений фильтров, умноженных на весовые коэффициенты
поступает последовательно на умножители 3, на другой вход которых поступают для перемножения сформированные каждым из цифровых фильтров оценки текущего значения амплитуды входного сигнала (1). Выходы умножителей соединены со входом сумматора 4, где производится суммирование выходных значений фильтров, умноженных на весовые коэффициенты
где  - оценка текущего значения амплитуды входного сигнала согласно предлагаемому способу адаптивной фильтрации, К - полное число фильтров и соответственно базовых сигналов. Оценка (2) текущего значения отражающей способности
- оценка текущего значения амплитуды входного сигнала согласно предлагаемому способу адаптивной фильтрации, К - полное число фильтров и соответственно базовых сигналов. Оценка (2) текущего значения отражающей способности  представляет собой выходное значение предлагаемого устройства адаптивной фильтрации, которое может быть отображено на экране монитора в одном из общепринятых режимов, например в В-режиме, как это показано на фиг.8, либо в одном из общепринятых режимов с одновременным отображением номера наиболее вероятного элемента структуры объекта зондирования, как это показано на фиг.4.
представляет собой выходное значение предлагаемого устройства адаптивной фильтрации, которое может быть отображено на экране монитора в одном из общепринятых режимов, например в В-режиме, как это показано на фиг.8, либо в одном из общепринятых режимов с одновременным отображением номера наиболее вероятного элемента структуры объекта зондирования, как это показано на фиг.4.
Для работы описанного выше устройства необходима предварительная тренировка запоминающего устройства, целью которого является получение на его выходе таких весовых коэффициентов v' для каждого из базовых сигналов амплитуды, поданных на его вход в виде порядкового номера соответствующего фильтра 2, при которых в выходном сигнале устройства адаптивной фильтрации в наибольшей степени сохраняется информация о структуре объекта зондирования, содержащаяся в базовом сигнале амплитуды.
Обучение включает в себя представление одного, например k-го, из базовых сигналов в виде номера k и задание желаемого выхода запоминающего устройства в виде вектора  Численные значения компонентов вектора
Численные значения компонентов вектора  записываются в запоминающее устройство и выбираются такими, чтобы на выходе устройства адаптивной фильтрации оценка амплитуды входного сигнала соответствовала значению, вытекающему непосредственно из желаемого вида амплитуды выходного сигнала. Один из возможных желаемых выходных сигналов при нормальном зондировании границы раздела фиг.5 показан на фиг.6.
записываются в запоминающее устройство и выбираются такими, чтобы на выходе устройства адаптивной фильтрации оценка амплитуды входного сигнала соответствовала значению, вытекающему непосредственно из желаемого вида амплитуды выходного сигнала. Один из возможных желаемых выходных сигналов при нормальном зондировании границы раздела фиг.5 показан на фиг.6.
Если из имеющихся выходов нелинейных цифровых фильтров ни при каком векторе  не удается получить желаемое значение амплитуды, то систему базовых сигналов и соответственно ряд нелинейных цифровых фильтров необходимо дополнить таким сигналом и соответственно фильтром, выход которого при обработке k-го сигнала будет наиболее близок к желаемому значению отражающей способности. В этом случае среди компонентов желаемого вектора
не удается получить желаемое значение амплитуды, то систему базовых сигналов и соответственно ряд нелинейных цифровых фильтров необходимо дополнить таким сигналом и соответственно фильтром, выход которого при обработке k-го сигнала будет наиболее близок к желаемому значению отражающей способности. В этом случае среди компонентов желаемого вектора  записываемого в запоминающее устройство, отличен от нуля и равен единице вес только этого фильтра.
записываемого в запоминающее устройство, отличен от нуля и равен единице вес только этого фильтра.
Далее процедура обучения запоминающего устройства повторяется для каждого из оставшихся базовых сигналов, включая добавленные базовые сигналы, так что пары из номеров k и соответствующих им векторов v' (вход-желаемый выход) для каждого из базовых сигналов являются обучающими.
Результаты обработки простым одномерным адаптивным фильтром изображений реальных органов человека показаны на фиг.7 и 8. На фиг.7 представлено исходное изображение фрагмента печени и правой почки, а на фиг.8 - изображение, полученное после предварительной обработки по предлагаемому алгоритму с использованием минимального окна данных х={х1, x2, x3}. При обработке использовано всего двенадцать нелинейных цифровых фильтров (1), обеспечивающих подавление спекл-шумов при сохранении всех элементов структуры объекта зондирования, несущих диагностически ценную информацию о его строении.
Заявленный способ и устройство адаптивной фильтрации могут быть реализованы, например, на программируемых логических интегральных схемах (ПЛИС) фирмы XILINX, осуществляющих все необходимые вычисления в реальном времени. Применение ПЛИС XCV600, имеющих объем в 600000 программируемых вентилей, позволяет, например, при окне данных из N=3 отсчетов амплитуды эхо-сигнала реализовать на каждой ПЛИС не менее четырех нелинейных фильтров, описываемых выражением (1). В соответствии с этим при N=3 полное число необходимых ПЛИС для К заданных элементов структуры зондируемого объекта не превышает К/4. В общем случае число ПЛИС XCV600 определяется числом отсчетов N амплитуды эхо-сигнала и числом К элементов структуры зондируемого объекта. Аналогичным образом статистический процессор, вычисляющий вероятности каждого из возможных элементов структуры зондируемого объекта, может быть выполнен с использованием ПЛИС XCV600, количество которых не превышает количество ПЛИС, использованных для фильтрации.
Для распознавателя сигналов, осуществляющего операции сравнения вероятностей всех возможных элементов структуры и определяющего номер наиболее вероятного элемента и соответствующий ему вектор весовых коэффициентов, может быть использована отдельная ПЛИС XCV300 меньшего объема. При этом часть программируемых вентилей ПЛИС используется в качестве логических ячеек компаратора, а оставшиеся - в качестве оперативного запоминающего устройства. Такая же ПЛИС может быть использована в качестве умножителя и сумматора для перемножения в реальном времени оценок каждого из фильтров с вектором весовых коэффициентов и сложения результатов всех перемножений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СРЕДНЕГО КОЭФФИЦИЕНТА ЗАТУХАНИЯ УЛЬТРАЗВУКА В МЯГКИХ ТКАНЯХ | 2020 |
|
RU2735466C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО ИЗМЕРЕНИЯ И ВИЗУАЛИЗАЦИИ УПРУГОСТИ БИОЛОГИЧЕСКИХ ТКАНЕЙ В РЕАЛЬНОМ ВРЕМЕНИ | 2018 |
|
RU2723753C1 |
| СПОСОБ ЦИФРОВОЙ ФИЛЬТРАЦИИ СИГНАЛОВ | 2009 |
|
RU2395158C1 |
| АДАПТИВНЫЙ ДВУМЕРНЫЙ СПОСОБ РАЗМНОЖЕНИЯ ОЦЕНОК И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2010 |
|
RU2461874C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ АЛГОРИТМА СИГМА-ТОЧЕЧНОГО ФИЛЬТРА КАЛМАНА | 2024 |
|
RU2840100C1 |
| Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех | 2020 |
|
RU2764781C1 |
| СПОСОБ ДИАГНОСТИКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445594C1 |
| СПОСОБ ЗОНДИРОВАНИЯ ИОНОСФЕРЫ, ТРОПОСФЕРЫ, ГЕОДВИЖЕНИЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2502080C2 |
| УСТРОЙСТВО ПРЕДОБРАБОТКИ КАРТЫ ГЛУБИНЫ СТЕРЕОИЗОБРАЖЕНИЯ | 2013 |
|
RU2535183C1 |
Изобретение относится к радиотехнике и может найти применение в качестве устройства адаптивной фильтрации в медицинской визуализации. Достигаемый технический результат - подавление шумовой составляющей сигнала в реальном масштабе времени без потери информации о структуре зондируемого объекта и сохранение, при необходимости, диагностической информации, содержащейся в спекл-шумах. Способ цифровой адаптивной фильтрации сигналов основан на проведении предварительного тренировочного процесса, направленного на оптимальное обнаружение элемента структуры объекта зондирования, задании порогов принятия решений, вычислении вероятностей различных гипотез относительно типа входного сигнала, вычислении отношений вероятностей и их сравнении с порогами принятия решений, определении наиболее вероятной гипотезы о типе входного сигнала, получении ряда оценок амплитуды входного сигнала, проведении оценки значения амплитуды выходного сигнала, как взвешенной суммы оценок цифровой фильтрации. Устройство для цифровой адаптивной фильтрации сигналов содержит ряд цифровых фильтров, умножители, сумматор и блок распознавания. 2 н. и 4 з.п. ф-лы, 8 ил.
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| СПОСОБ И УСТРОЙСТВО АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ ФИЛЬТРАЦИИ СИГНАЛОВ | 1998 |
|
RU2141706C1 |
| ЦИФРОВОЙ ФИЛЬТР | 1990 |
|
RU2024184C1 |
| СЫРЬЕВАЯ СМЕСЬ ДЛЯ ИЗГОТОВЛЕНИЯ ЛЕГКИХ СИЛИКАТНЫХ СТЕНОВЫХ МАТЕРИАЛОВ ДЛЯ СТРОИТЕЛЬНЫХ ИЗДЕЛИЙ И СТРОИТЕЛЬНОЕ ИЗДЕЛИЕ | 2006 |
|
RU2303015C1 |
| US 5075880, 24.12.1991. | |||

