Изобретение относится к области авиации и может быть использовано в одновинтовых вертолетах.
Известен вертолет, который включает в себя несущий винт, хвостовую балку, имеющую задний концевой участок, продольную щель для управления циркуляцией воздуха, идущую вдоль хвостовой балки с отверстиями для выхода воздуха, и подруливающее устройство с лопатками, установленное на заднем участке хвостовой балки, отклоняющими воздушный поток в поперечном направлении (Патент РФ №2155703. Способ управления подруливающим устройством вертолета и подруливающее устройство для вертолета. – МКИ 6: В 64 С 27/82, - БИ №25, 10.09.99). Недостатками известного вертолета являются сложность конструкции и малая эффективность управления при полетах вертолета в условиях критической плотности воздуха.
Известен одновинтовой вертолет, состоящий из фюзеляжа с несущим винтом, хвостовой балки, закрепленной на заднем отсеке фюзеляжа, концевой балки, соединенной с задней оконечностью хвостовой балки, рулевого винта, установленного на концевой балке, при этом хвостовая балка имеет поперечные сечения, внешний обвод каждого из которых выполнен обтекаемой формы и сужается от заднего отсека фюзеляжа по мере приближения к концевой балке. Выполнение хвостовой балки с внешним профилем, имеющим достаточно обтекаемую верхнюю часть и нижнюю достаточно плоскую часть, которые в месте сопряжения образуют достаточно острые две сплошные грани от заднего отсека фюзеляжа до оконечности хвостовой балки, обеспечивает большую транспортную мощность и высокую сопротивляемость вертолета воздействию индуктивного потока воздуха от вращения лопастей несущего винта, особенно в режиме висения (Патент FR №2 582 615. Вертолет. - МКИ В 64 С 27/04, 1/00. - ВОИС. “Патенты”, №49 от 05.12.1986 г.). Недостатками известного вертолета являются сложность конструкции и недостаточная маневренность вертолета, особенно при разворотах в направлении вращения несущего винта в условиях малой плотности воздуха, приводящей к срыву потока воздуха с лопастей рулевого винта.
Известен вертолет, содержащий фюзеляж с несущим винтом, хвостовую балку, закрепленную на заднем отсеке фюзеляжа, концевую балку, установленную в вертикальной плоскости на заднем конце хвостовой балки, и рулевой винт, при этом хвостовая балка имеет поперечные сечения, внешний обвод каждого из которых выполнен обтекаемой формы и сужается от заднего отсека фюзеляжа по мере приближения к килю (Кн. Богданов Ю.С. и др. Конструкция вертолетов: Учебник для авиационных техникумов / Ю.С.Богданов, Р.А.Михеев, Д.Д.Скулков. - М.: Машиностроение, 1990, с. 136-147). Данный вертолет принят за прототип.
Недостатком известного вертолета, принятого за прототип, является недостаточная маневренность вертолета, особенно при разворотах в направлении вращения несущего винта в условиях малой плотности воздуха, приводящей к срыву потока воздуха с лопастей рулевого винта.
Известен способ управления одновинтовым вертолетом, заключающийся в регулировании циркуляции воздушного потока от несущего винта и управлении потоком воздуха, нагнетаемого вентиляторами по двум каналам с разным давлением и выбрасываемого через продольную щель управления циркуляцией воздушного потока, обтекающего хвостовую балку, и реактивным двигателем малой тяги системы управления в поперечном направлении от боковой поверхности заднего конца хвостовой балки (Патент РФ №2136543. Способ и устройство управления вертолета. – МКИ 6: В 64 С 27/82, - БИ №25, 10.09.99). Недостатками известного способа являются малая эффективность воздушных потоков, выбрасываемых реактивным двигателем малой тяги в поперечном направлении хвостовой балки при полетах вертолета в условиях критической плотности воздуха, и увеличение массы вертолета.
Известен способ управления одновинтовым вертолетом, заключающийся в регулировании циркуляции воздушного потока от несущего винта через продольную щель хвостовой балки и в управлении потоком воздуха к отклоняющим лопаткам подруливающего устройства на заднем участке хвостовой балки в поперечном направлении через регулируемые отверстия в боковой поверхности заднего конца хвостовой балки для управления рысканием вертолета (Патент РФ №2155703. Способ управления подруливающим устройством вертолета и подруливающее устройство для вертолета. –МКИ6: В 64 С 27/82, БИ №25, 10.09.99). Недостатком известного способа является малая эффективность управляемого потока воздуха в поперечном направлении через отверстия в боковой поверхности заднего конца хвостовой балки к отклоняющим лопаткам подруливающего устройства при полетах вертолета в условиях критической плотности воздуха.
Известен способ управления одновинтовым вертолетом, включающий уравновешивание реакции связей фюзеляжа от вращающего момента несущего винта моментом силы на конце хвостовой балки, например, создаваемым дополнительным усилием тяги рулевого винта путем увеличения угла установки лопастей при рыскании. При прочих равных условиях угол установки лопастей рулевого винта, потребный для путевой балансировки вертолета, возрастает при уменьшении плотности воздуха. Весьма эффективное конструктивное средство разгрузки рулевого винта на режимах горизонтального полета вертолета - установка развитого профилированного киля с поворотом на угол 5...7° относительно вертикальной плоскости симметрии фюзеляжа в направлении, противоположном вращению несущего винта. На режиме горизонтального полета киль создает дополнительную боковую аэродинамическую силу, противодействующую вращающему моменту несущего винта (Кн. Володко А.М. Основы аэродинамики и динамики полета вертолетов: Учеб. пособие для вузов. - М.: Транспорт, 1988. - с. 136-141, 180). Данный способ принят за прототип.
Недостатком известного способа управления одновинтового вертолета, принятого за прототип, является то, что взлет с высокогорных площадок иногда лимитируется не только располагаемой мощностью силовой установки, но и запасом путевого управления, который вообще является одним из наиболее важных факторов, определяющих безопасные условия летной эксплуатации одновинтовых вертолетов, на которое оказывает влияние барометрическая высота висения вертолета и температура наружного воздуха, т.е. по существу плотность воздуха. При уменьшении плотности воздуха для поддержания в нем вертолета требуется больший общий шаг несущего винта и соответственно угол установки лопастей рулевого винта, т.е. запас путевого управления в направлении вращения несущего винта уменьшается, так как диапазон углов установки лопастей рулевого винта ограничен срывом потока воздуха с лопасти. Несоблюдение этих ограничений может привести к самопроизвольному неуправляемому вращению вертолета в направлении, противоположном вращению несущего винта, и закончиться столкновением его с землей.
Основной задачей, на решение которой направлены заявляемые вертолет и способ управления одновинтовым вертолетом, является повышение управляемости вертолета по рысканию в условиях критической плотности воздуха и увеличение потолка полетов вертолетов.
Единым техническим результатом, достигаемым при осуществлении заявленной группы изобретений, является повышение управляемости одновинтового вертолета с рулевым винтом по рысканию в условиях критической плотности воздуха и увеличение высоты полетов вертолетов.
Указанный технический результат достигается тем, что в известном вертолете, содержащем фюзеляж с несущим винтом, хвостовую балку, закрепленную на заднем отсеке фюзеляжа, концевую балку, установленную в вертикальной плоскости на задней оконечности хвостовой балки, и рулевой винт для создания момента силы, противодействующего реактивному моменту несущего винта, при этом внешние обводы поперечных сечений хвостовой балки имеют обтекаемую форму, сужающуюся от заднего отсека фюзеляжа в направлении к концевой балке, согласно предложенному техническому решению, он снабжен, по меньшей мере, одним аэродинамическим профилем, закрепленным сбоку на расстоянии от хвостовой балки в зоне наибольшего индуктивного потока воздуха от вращения несущего винта при висении вертолета для передачи фюзеляжу в направлении тяги рулевого винта дополнительного момента силы, создаваемого циркуляционным обтеканием поверхности аэродинамического профиля индуктивным потоком воздуха от вращения лопастей несущего винта;
аэродинамические профили закреплены с обеих боковых сторон хвостовой балки;
аэродинамические профили установлены на хвостовой балке с возможностью изменения угла наклона хорды поперечного сечения профиля к вектору скорости индуктивного потока воздуха от вращения лопастей несущего винта;
вдоль хвостовой балки со стороны, противоположной расположению аэродинамического профиля, установлен аэродинамический щиток в зоне, по меньшей мере, наибольшего индуктивного потока воздуха от несущего винта под углом наклона к вертикальной плоскости симметрии фюзеляжа;
концевая балка выполнена в виде профилированного киля, развернутого в горизонтальной плоскости на угол 5-7° относительно вертикальной плоскости симметрии фюзеляжа в направлении, противоположном направлению вращения лопастей несущего винта.
Указанный технический результат достигается тем, что в известном способе управления одновинтовым вертолетом, заключающимся в том, что реакции связей, действующих на фюзеляж от вращающего момента несущего винта, компенсируют моментом силы от рулевого винта, а при управлении по курсу - с дополнительным моментом силы от циркуляционного обтекания встречным потоком воздуха профилированного киля, установленного в конце хвостовой балки и развернутого в горизонтальной плоскости на угол 5-7° относительно вертикальной плоскости симметрии фюзеляжа в направлении, противоположном направлению вращения несущего винта, согласно предложенному техническому решению, реакции связей, действующих на фюзеляж от вращающего момента несущего винта, компенсируют при висении вертолета с дополнительным моментом силы в направлении тяги рулевого винта от циркуляционного обтекания поверхностей аэродинамических профилей, закрепленных на хвостовой балке, индуктивным потоком воздуха от вращения лопастей несущего винта.
Проведенный заявителем анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностями признаков, тождественными всем признакам заявленных способа повышения управляемости полетом одновинтового вертолета по курсу и вертолета для осуществлении этого способа, отсутствуют. Следовательно, каждое из заявленных технических решений соответствует условию патентоспособности “новизна”.
Результаты поиска известных решений в данной области техники с целью выявления признаков, совпадающих с отличительными от прототипов признаками каждого заявляемого технического решения, показали, что они не следуют явным образом из уровня техники. Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками каждого из заявляемых технических решений преобразований на достижение указанного технического результата. Следовательно, каждое из заявляемых технических решений соответствует условию патентоспособности “изобретательский уровень”.
В настоящей заявке на выдачу патента соблюдено требование единства изобретения, поскольку способ повышения управляемости одновинтового вертолета и вертолет для его осуществления предназначены для обеспечения безопасности полетов одновинтовых вертолетов по рысканию в условиях критической плотности воздуха.
Заявленные технические решения решают одну и ту же задачу - повышение управляемости одновинтового вертолета с рулевым винтом по рысканию в условиях критической плотности воздуха.
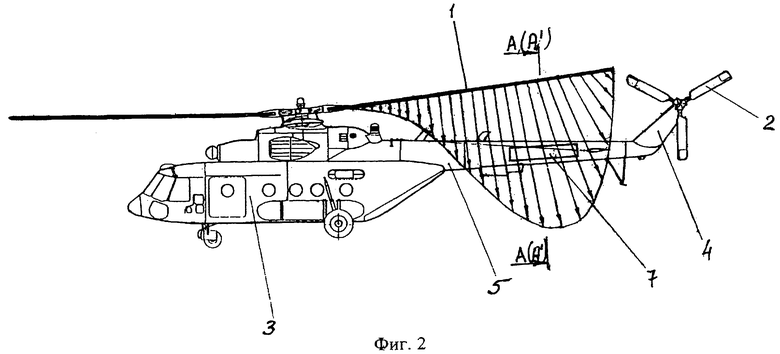
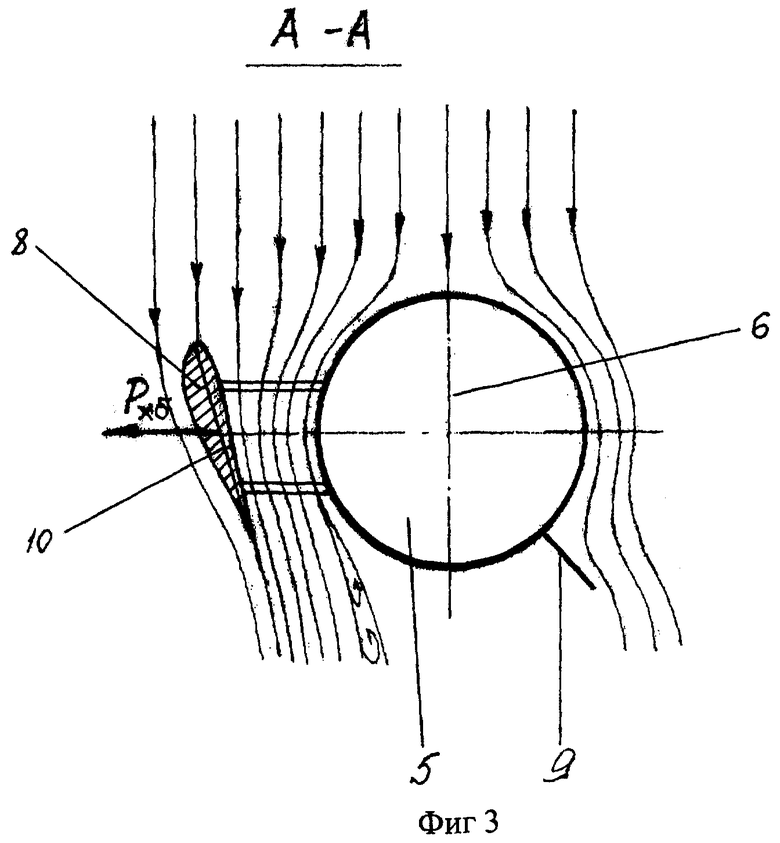
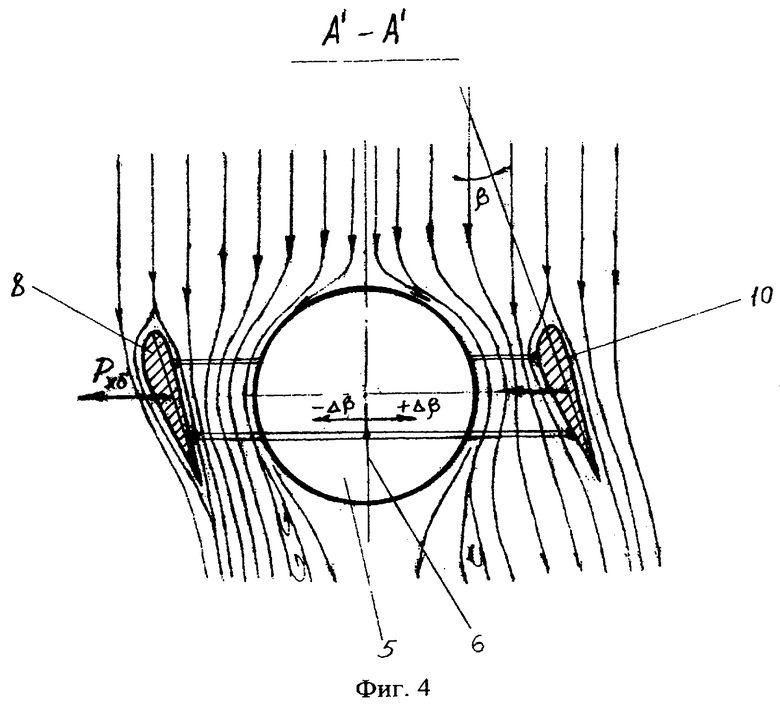
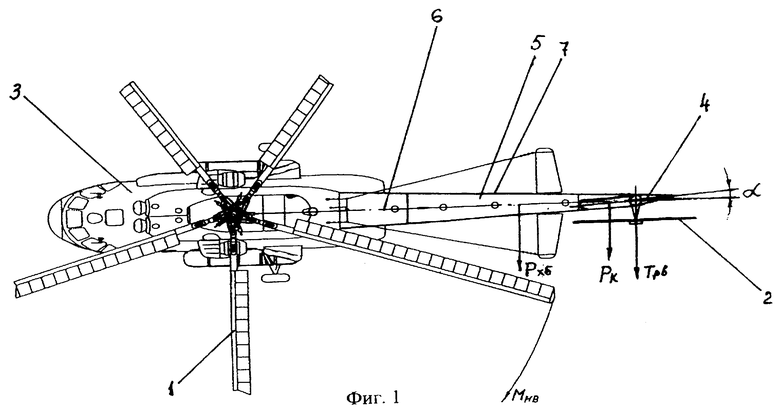
На фиг.1 схематично показаны силы, действующие на вертолет, вид сверху; на фиг.2 - схема индуктивного потока воздуха от вращения лопастей несущего винта вертолета; на фиг.3 - сечение А-А хвостовой балки с аэродинамическими профилем и щитком на фиг.2; на фиг.4 - сечение А'-А' хвостовой балки с аэродинамическими профилями с обеих сторон на фиг.2.
Сущность предложенного способа управления одновинтовым вертолетом заключается в следующем.
При управлении полетом одновинтового вертолета реакции связей от вращающего момента Мн.в несущего винта 1 уравновешивается моментом силы, развиваемой усилием тяги Тр.в рулевого устройства 2 посредством регулирования угла установки лопастей, который создает для установившихся режимов полета тягу Тр.в, необходимую для компенсации реакции связей от несущего винта 1 (фиг.1). При прочих равных условиях угол установки лопастей рулевого устройства 2, потребный для путевой балансировки вертолета, возрастает с уменьшением плотности воздуха и в условиях критической плотности воздуха может привести к срыву потока воздуха с лопастей рулевого винта 2. Для повышения управляемости одновинтового вертолета по курсу часть реакции связей, действующей на фюзеляж 3 от вращающего момента Мн.в несущего винта 1, уравновешивают моментом силы Рк, создаваемой циркуляционным обтеканием профилированного киля 4 встречным потоком воздуха при горизонтальном полете вертолета, установленного на задней оконечности хвостовой балки 5 и развернутого в горизонтальной плоскости на угол α=5...7° относительно вертикальной плоскости симметрии 6 фюзеляжа 3 в направлении, противоположном направлению вращения лопастей несущего винта, а полученный при этом запас тяги ΔТр.в=Тр.в - Рк рулевого винта 2 используют для повышения управляемости по курсу. Для повышения управляемости одновинтового вертолета по рысканию часть реакции связей, действующей на фюзеляж 3 от вращающего момента Мн.в. несущего винта 1, уравновешивают дополнительным моментом силы Рх.б., создаваемой на хвостовой балке 5 циркуляционным обтеканием аэродинамических поверхностей 7 индуктивным потоком воздуха от вращения лопастей несущего винта 1, а полученный запас тяги ΔТр.в= Тр.в.- Рх.б рулевого винта 2 используют для повышения управляемости вертолета по рысканию (фиг.2).
Одновинтовой вертолет содержит фюзеляж 3 с несущим винтом 1, хвостовую балку 5, закрепленную на заднем отсеке фюзеляжа 3, концевую балку 4, выполненную в виде профилированного киля, развернутого в горизонтальной плоскости на угол α=5...7° относительно вертикальной плоскости симметрии 6 фюзеляжа 3 в направлении, противоположном направлению вращения лопастей несущего винта, соединенную с задней оконечностью хвостовой балки 5, рулевой винт 2, установленный на концевой балке 4 тянущим хвостовую балку 5 в направлении перемещения лопастей несущего винта 1 над хвостовой балкой. Хвостовая балка 5 имеет поперечные сечения, внешний обвод каждого из которых выполнен обтекаемой формы и сужается от заднего отсека фюзеляжа 3 по мере приближения к концевой балке 4. Сбоку хвостовой балки 5 на расстоянии f от нее закреплен аэродинамический профиль 8, передающий фюзеляжу 3 при висении вертолета в направлении вращения несущего винта 1 дополнительный момент силы Рх.б, создаваемой циркуляционным обтеканием профиля 8 индуктивным потоком воздуха от вращения лопастей несущего винта 1 (фиг.3). Вдоль хвостовой балки 5 со стороны, противоположной расположению аэродинамического профиля 8, установлен щиток 9, по крайней мере, на длине наибольшего индуктивного потока воздуха от несущего винта 1 под углом наклона к вертикальной плоскости симметрии фюзеляжа 3. В другом варианте исполнения вертолета аэродинамические профили 8 закреплены с обеих боковых сторон хвостовой балки 5 (фиг.4). Аэродинамические профили 8 установлены на хвостовой балке 5 с возможностью изменения угла наклона β хорды 10 поперечного сечения профиля к вектору скорости индуктивного потока воздуха от вращения лопастей несущего винта 1.
Вертолет работает следующим образом.
При полете одновинтового вертолета реакция связей, действующей на фюзеляж 3 от вращающего момента Мн.в несущего винта 1, уравновешивается моментом силы, развиваемой усилием тяги Тр.в рулевого винта 2 посредством регулирования угла установки его лопастей. Для исключения срыва потока воздуха при висении или подъеме одновинтового вертолета в условиях малой плотности воздуха при управлении по рысканию часть реакции связей фюзеляжа 3 от вращающего момента Мн.в несущего винта 1 компенсируется дополнительным моментом силы Рх.б, создаваемой на хвостовой балке 5 циркуляционным обтеканием аэродинамических профилей 7 индуктивным потоком воздуха от вращения лопастей несущего винта 1, а полученный запас тяги рулевого устройства 2 используют для повышения управляемости вертолета по рысканию. С увеличением массы вертолета увеличивают угол наклона β хорды 13 поперечного сечения аэродинамических профилей 8 по отношению к вектору скорости индуктивного потока воздуха от вращения несущего винта 1. При управлении одновинтовым вертолетом по курсу часть реакции связей фюзеляжа 3 от вращающего момента Мн.в несущего винта 1 компенсируется дополнительным моментом силы Рк, создаваемой циркуляционным обтеканием профилированного киля 4 встречным потоком воздуха при горизонтальном полете вертолета, развернутого на угол α=5...7° относительно вертикальной плоскости симметрии 6 фюзеляжа 3, а полученный при этом запас тяги рулевого винта 2 используют для повышения управляемости вертолета по курсу.
Предложенная конструкция вертолета позволит обеспечить безопасность полетов в горных условиях и значительно повысить потолок полетов вертолетов до уровня, располагаемого несущим винтом и мощностью силовой установки.
На предложенную конструкцию вертолета с дополнительными аэродинамическим профилями по бокам хвостовой балки разработан эскизный проект и изготовлена модель вертолета для испытаний ее в аэродинамической трубе.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРТОЛЕТ | 2003 |
|
RU2246426C1 |
| СИСТЕМА КОМПЕНСАЦИИ РЕАКТИВНОГО МОМЕНТА НЕСУЩЕГО ВИНТА ОДНОВИНТОВОГО ВЕРТОЛЁТА | 2003 |
|
RU2245821C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ С ДВИЖИТЕЛЬНО-РУЛЕВОЙ СИСТЕМОЙ | 2016 |
|
RU2629478C2 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2664024C2 |
| Устройство компенсации реактивного момента несущего винта вертолета | 2021 |
|
RU2796703C2 |
| БЕСПИЛОТНЫЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2601470C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ, ДЕСАНТИРУЕМЫЙ С САМОЛЕТА-НОСИТЕЛЯ | 2016 |
|
RU2627975C2 |
| СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2610326C1 |
| Устройство компенсации реактивного момента несущего винта вертолета | 2021 |
|
RU2788013C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652863C1 |
Изобретение относится к области авиации и может быть использовано в одновинтовых вертолетах. Вертолет содержит фюзеляж с несущим винтом, хвостовую и концевую балки, рулевой винт, при этом хвостовая балка имеет поперечные сечения, внешние обводы которых сужаются от заднего грузового отсека по мере приближения к концевой балке, а концевая балка выполнена в виде профилированного киля с углом разворота в горизонтальной плоскости. На боковых сторонах хвостовой балки установлены аэродинамический профиль и аэродинамический щиток по крайней мере на длине наибольшего индуктивного потока воздуха или аэродинамические профили с возможностью изменения угла наклона хорды относительно вертикальной плоскости симметрии фюзеляжа, создающие момент силы, противодействующий реактивному моменту вращения несущего винта. Способ управления одновинтовым вертолетом заключается в компенсации реакции связей, действующих на фюзеляж от вращающего момента несущего винта, моментом силы от рулевого винта, а при управлении по курсу – с дополнительным моментом силы от циркуляционного обтекания встречным потоком воздуха профилированного киля, установленного в конце хвостовой балки и развернутого в горизонтальной плоскости на угол 5-7° относительно вертикальной плоскости симметрии фюзеляжа в направлении, противоположном направлению вращения несущего винта. Технический результат – повышение управляемости одновинтового вертолета с рулевым винтом по рысканию в условиях критической плотности воздуха и увеличение высоты полетов вертолетов. 2 н. и 4 з.п. ф-лы, 4 ил.
| Учебник для авиационных техникумов | |||
| БОГДАНОВ Ю.С | |||
| и др | |||
| - М.: Машиностроение, 1990, с | |||
| Регулятор для ветряного двигателя в ветроэлектрических установках | 1921 |
|
SU136A1 |

