Изобретение относится к области авиационной техники и касается создания для летающего авианосца скоростного вертолета одновинтовой схемы, несущий винт которой без автомата перекоса смонтирован на вертикальной полой опоре, установленной от главного редуктора до верхнего стреловидного крыла, обтекатель которого имеет узел стыковки/расстыковки и над ним контейнер с парашютом и создает с задней четырехвинтовой движительно-рулевой системой, имеющей рулевые как верхний и нижний меньшие винты, так и левый и правый средние винты в кольцевых каналах, возможность выполнения или десантирования на парашюте, или как стыковки, так и расстыковки с выдвижным ответным узлом жесткой системы крепления пилотируемого самолета-носителя как для приема его на борт, так и для обратной операции.
Известна система спасения вертолетов (Патент RU №2297367 от 15.09.2009), содержащая контейнер с парашютом, установленный на верхнем несущем винте и жестко соединенный с осью вращения, установленной на втулке несущего винта с помощью радиально-упорных подшипников, имеет на контейнере жестко закрепленный вертикальный стабилизатор, выполненный с возможностью стабилизации контейнера с парашютом от вращения вокруг своей оси от сил трения, возникающих в радиально-упорных подшипниках при вращении втулки несущего винта вертолета.
Признаки, совпадающие - наличие контейнера с парашютом, установленного на верхнем несущем винте и жестко соединенного с осью вращения, установленной на втулке несущего винта вертолета, винтокрыла или автожира. Помимо этого на раскрываемом контейнере имеется жестко закрепленный вертикальный стабилизатор.
Причины, препятствующие поставленной задаче: первая - это то, что контейнер с парашютом от сил трения, возникающих в радиально-упорных подшипниках при вращении втулки несущего винта вертолета при поперечном наклоне или раскачивании его фюзеляжа не исключено при этом увеличение сил трения, возникающих в радиально-упорных подшипниках и, как следствие, контейнер тоже будет вращаться вместе с несущим винтом, что вызовет при раскрытии парашюта скручивание строп парашюта, что недопустимо. Вторая - это то, что отсутствие между несущим винтом и контейнером горизонтальной несущей поверхности - высокорасположенного крыла, смонтированного на опоре, проходящей внутри вала несущего винта, не обеспечивает защиту его самовращающихся лопастей от возможного послабления строп парашюта и их наматывания либо на вал, либо на лопасти несущего винта, что недопустимо. А возможное проворачивание контейнера совместно с вращающимся нагруженным несущим винтом создает возможность отклонения продольной оси контейнера от плоскости симметрии и в случае наличия в передней его части узла стыковки/расстыковки, что делает не возможным выполнение технологии десантирования с узла выдвижной балки жесткой системы крепления самолета-носителя.
Известен проект вертикально взлетающего пилотируемого авианосца корпорации Boeing (США) (Патент US №2015/0115096 от 30 апреля 2015), содержащий доработанный двухвинтовой продольной схемы вертолет-носитель CH-47F «Chinook» с беспилотным летательным аппаратом (БПЛА) самолетного типа, который, имея на консолях его крыла два двигателя с тянущими винтами, крепится к нижней части вертолета-носителя, может отделяться от него и выполнять задачи самостоятельно.
Признаки, совпадающие - наличие тяжелого вертолета-носителя модели CH-47F «Chinook», имеющего выемку в нижней части фюзеляжа для специального узла крепления центропланом БПЛА - «летающее крыло». Благодаря двум винтам, установленным на крыле БПЛА, вертолет, состыкованный с ним, сможет развивать значительно большую скорость. Возможности самого БПЛА также расширятся, поскольку из-за совмещенной платформы его удастся доставить к месту назначения без расходования его топлива. А возможность дозаправки в воздухе БПЛА у вертолета-носителя при небольшом количестве топлива у современных БПЛА, что повышает их потенциал.
Причины, препятствующие поставленной задаче: первая - это то, что тяжелый вертолет двухвинтовой продольной схемы, имеющий подфюзеляжное крепление двухвинтового БПЛА, что предопределяет необходимость значительного удлинения стоек колесного шасси вертолета-носителя, что увеличит массу его конструкции и уменьшит весовую отдачу. Кроме того, БПЛА аэродинамической схемы «летающее крыло» без вертикальных килей весьма затруднит без стабильности управления в канале рыскания сам процесс его стыковки и тем более при совмещении узлов крепления, размещенных на верхней части центроплана БПЛА и ответных под фюзеляжем вертолета. Вторая - это то, что размах крыла у БПЛА гораздо больше колеи и базы колесного шасси вертолета-носителя, что затруднит наземное их совместное обслуживание. Третья - это то, что небольшая крейсерская скорость полета 253 км/ч и радиус действия до 465 км, но и практический потолок 3090 м тяжелого вертолета модели CH-47F «Chinook» - это гораздо меньше современных БПЛА самолетного типа, что снижает их совместный потенциал. Третья - это то, что для повышения горизонтального поступательного полета при совместном использовании пропульсивной тяги двух несущих винтов, имеющих взаимное перекрытие 21,4%, и двух винтов от состыкованного с вертолетом БПЛА, размещенных как раз под зоной перекрытия несущих винтов, приведет к вредной аэродинамической интерференции несущих винтов и меньших винтов БПЛА и сильное влияние вихревого поля каждого несущего винта на тягу и крутящий момент боковых тяговых винтов, которые могут привести к нарушению баланса сил и моментов, действующих на вертолет-носитель и, как следствие, к образованию «разнотяговости» боковых винтовых движителей. Кроме того, размещение узла крепления для одного БПЛА и только под фюзеляжем пилотируемого вертолета-носителя, что весьма затрудняет выполнение стыковки/расстыковки в воздухе, особенно, тяжелого вертолета и БПЛА самолетного типа при горизонтальном скоростном их полете, но и ограничивает возможности «воздушного авианосца», имеющего только один БПЛА. Тогда как при размещении в отсеке вертолета-носителя это может быть и 2-3 БПЛА тяжелого класса с взлетным весом до 3-4 тонн.
Наиболее близким к предлагаемому изобретению является скоростной вертолет модели Lockheed АН-56 «Cheyenne» (США), имеющий одновинтовую несущую схему с рулевым винтом, содержит один двигатель, передающий крутящий момент через главный редуктор и систему соединительных валов на несущий винт, смонтированный отклоненным вперед по полету, но и на тяговый и рулевой винты, установленные на концах соответственно хвостовой балки и левой консоли стабилизатора Т-образного оперения и трехопорное шасси, имеющее главные опоры с передними колесами, убирающимися в боковые наплывы среднерасположенного крыла.
Признаки, совпадающие - наличие крыла, хвостового оперения и одного турбовального двигателя мощностью 3435 л.с, главного редуктора и валов трансмиссии, передающих мощность несущему винту (D=15,56 м), но и рулевому (d=3,04 м) толкающему винтам (d=3,04 м), обеспечивающим соответственно управление по курсу и его поступательный горизонтальный полет. Несущий винт имеет автомат перекоса с управлением общего и циклического изменения его шага, предназначен для создания подъемной и пропульсивной силы, а поступательное движение в скоростном полете обеспечивает в большей степени толкающий винт. Независимое вращение четырехлопастных несущего, рулевого и толкающего винтов - синхронизирующее. Взлетная тяговооруженность силовой установки (СУ), позволяющая при непродолжительном времени висения, иметь целевую нагрузку 1000 кг при взлетном его весе 8006 кг. Скоростной вертолет модели Lockheed АН-56 «Cheyenne», имея максимальные скорости полета до 407 км/ч, дальность полета до 1400 км и практический потолок 7925 м, может применяться для эскортирования десантно-транспортных вертолетов.
Причины, препятствующие поставленной задаче: первая - это то, что вертолет одновинтовой несущей схемы с рулевым винтом, снабженный на конце хвостовой балки отдельным толкающим винтом, используемым только на крейсерских режимах полета, имеет повышенное аэродинамическое сопротивление, сложную схему редуцирования при независимом вращении трех винтов, но и большую паразитную массу, малую весовую отдачу и радиус действия. Вторая - это то, что СУ включает один турбовальный двигатель и, тем самым, снижает надежность крейсерского полета при его отказе. Третья - это то, что в вертолете одновинтовой схемы имеют место непроизводительные средние затраты 12-16% мощности СУ на привод рулевого винта, необходимость длиной хвостовой балки, агрегатов хвостовой трансмиссии и опасность, создаваемая рулевым винтом, смонтированным на конце горизонтального оперения, для наземного персонала. Четвертая - это то, что вес рулевого и тягового винтов вместе с хвостовой балкой и агрегатами трансмиссии составляет до 18% веса пустого вертолета и имеет тенденцию к увеличению с ростом взлетного его веса. Пятая - это то, что крыло и хвостовое оперение не имеют поверхностей управления, что предопределяет для управления по крену и тангажу необходимость постоянного вращения нагруженного несущего винта и работой автомата перекоса и при авторотации последнего не позволяет эффективно использовать его для продольно-поперечного управления. Шестая - это то, что при висении поток от несущего винта, обдувая консоли крыла и создавая значительную общую потерю в вертикальной его тяге, затормаживается и большие скорости потока отбрасываемого от них предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги несущего винта и создавать ситуацию неуправляемого падения, что снижает стабильность управления и безопасность. А по мере роста скорости горизонтального полета проблема также усугубляется, поскольку на отступающей стороне несущего винта возникает участок, в котором абсолютная скорость его лопастей относительно воздуха становится практически нулевой и этот участок лопастей, естественно, в создании подъемной силы не участвует, что ухудшает уравновешивание в поперечном канале, особенно, из-за расположения этого участка как раз над прямым крылом. Седьмая - это то, что несущий винт изменяемого шага и с управлением циклического его шага значительно осложняет конструкцию, а постоянные вибрации, возникающие при работе автомата его перекоса, создающего неблагоприятные условия для работы других механизмов и оборудования. Кроме того, один двигатель СУ и отсутствие средств спасения (например, отделяемая кабина на парашюте) в случае его отказа и выхода из строя рулевого и несущего винта (например, отстрел лопастей несущего винта и катапультирование пилотов на парашюте)) снижает безопасность, а отсутствие над несущим винтом верхнего крыла с углом (ψ>0) поперечного V исключает возможность использования средств как десантирования на парашюте, так и спасения, но и стыковки-расстыковки без их соприкосновения с несущим винтом.
Предлагаемым изобретением решается задача в указанном выше известном скоростном вертолете модели Lockheed АН-56 «Cheyenne» (США) упрощения поперечной и продольной управляемости при висении, повышения скорости, высоты и дальности полета, а также показателей транспортной эффективности и уровня безопасности посредством размещения верхнего крыла между несущим винтом и контейнером парашюта, но и выполнения технологии как десантирования и спасения на парашюте, так и стыковки/расстыковки с выдвижными ответными узлами самолета-носителя.
Отличительными признаками предлагаемого изобретения от указанного выше известного скоростного вертолета Lockheed АН-56 «Cheyenne», наиболее близкого к нему, являются наличие того, что он выполнен как по технологии многорежимного аэродинамического управления, обеспечивающего разновеликими рулевыми винтами сверхманевренность и балансировку по тангажу, крену и курсу, так и аэродинамической схеме биплан, создающей распределенную разгрузку или авторотирующего, или нагруженного несущего винта без управления циклического изменения его шага и с жестким креплением его лопастей, смонтированного на полой опоре, установленной соосно внутри вала несущего винта, которая жестко закреплена своим нижним концом к корпусу внутренней нижней части главного редуктора несущего винта, а верхним сцентрирована относительно его вала при помощи подшипникового узла таким образом, что выступающая из вала верхняя часть полой опоры закреплена в каплевидном обтекателе, имеющем в передней части ответную часть узла стыковки/расстыковки жесткой системы крепления, а в верхней автоматически раскрываемой части - контейнер с вытяжным и основным парашютами, стропы последнего закреплены на верхней части полой опоры, которая смонтирована совместно с узлом стыковки/расстыковки и центропланом стреловидного верхнего крыла, образующего с низкорасположенным прямым крылом обратной стреловидности (КОС) как бы схему биплан большой высоты с крыльями большого удлинения и выносом концевых хорд нижнего и верхнего крыла от их корневых хорд вперед и назад по полету соответственно со стреловидностью по передней их кромкам χ=-20° и χ=+20°, образующим с разнонаправленной стреловидностью Х-образную в плане конфигурацию, но и концепции заднего размещения четырехвинтовой движительно-рулевой системы (ДРС) как с рулевыми верхним и нижним винтами, так и тягово-рулевыми с отклоняемым вектором тяги винтами в левом и правом кольцевых каналах, создающими при вертикальном взлете/посадке или висении соответственно разновеликие и равновеликие тяги для соответствующего как управления по крену и курсу с компенсацией реактивного момента, возникающего при вращении несущего винта, так и интенсивной обдувкой предварительно синфазно отклоненных развитых рулей высоты, изменяющих продольную балансировку и установленных на выходе снизу и сверху от центра каждого кольцевого канала, при этом в носовой части под фюзеляжем по продольной его оси смонтирована выдвижная штанга, обеспечивающая в выдвинутом ее положении вынос за диск вращения лопастей несущего винта на ее конце ответную часть узла стыковки/расстыковки гибкой системы захвата, крепления и подтягивания, причем управляющие моменты для поперечной балансировки осуществляются при разновеликой тяге верхнего и нижнего меньших винтов совместно при дифференциальном отклонении рулей высоты левого и правого кольцевых каналов и при их последующем обдуве соответствующими средними винтами, размещенными на консолях стреловидного стабилизатора, смонтированного за вертикальным оперением, образующим в поперечной плоскости как бы крестообразное хвостовое оперение, верхний и нижний трапециевидные кили которого, имеющие профили с их толщиной равновеликой длине соответствующего кольцевого канала с меньшим винтом, нижний киль из которых снабжен на его законцовке амортизационной стойкой заднего колеса и рулем направления, выполненным в виде цельно-поворотной концевой части, обеспечивающей стойке заднего колеса возможность управляемого разворота кормовой части его фюзеляжа при рулении и на земле, при этом консоли нижнего КОС, выполненные с возможностью синхронного их поворота в плоскости хорды крыла вперед по полету и поворачивания их в соответствующие боковые ниши при трансформации схемы биплан в моноплан и для удобства его размещения в грузовом отсеке самолета-носителя, снабжены по всему их размаху односекционными закрылками с внешними флапперонами, имеющими корневую хорду в 19/11 раза больше концевой хорды и возможность их отклонения на углы 20°/40° и 75° соответственно только при повернутых из соответствующих боковых ниш консолей в полетное состояние, соответствующее условиям, повышающим продольную устойчивость для взлета/посадки с коротким разбегом/пробегом и вертикального взлета, посадки или висения, но и образующими при максимальном их отклонении как бы КОС "обратного сужения", создающего в зоне максимальных индуктивных скоростей воздушного потока от несущего винта возможность и уменьшения на 8% потерь подъемной силы от обдувки консолей КОС, и препятствования обратному перетеканию воздушного потока, причем несущий четырехлопастной винт выполнен с возможностью фиксированной остановки и автоматического складывания вперед по полету соответствующих двух лопастей и с последующим их размещением по обе стороны от оси симметрии, а каждая консоль стреловидного крыла, снабженного только после складывания лопастей несущего винта возможностью синхронного поворота вниз и их расположения на соответствующих бортах фюзеляжа для удобства его размещения в грузовом отсеке самолета-носителя и имеющего положительный угол поперечного V и выпукло-вогнутый профиль, снабжена с соответствующим профилем концевой частью, выполненной в виде трехэлементного разрезного устройства с несущими поверхностями, смонтированными между его внутренней и концевой плоских шайб и обеспечивающими при вертикальной их обдувке воздушным осевым потоком от несущего винта увеличение коэффициента подъемной силы от крыла при вертикальном взлете/посадке и висении, при этом каждое разрезное устройство выполнено в виде трех разновеликих по ширине крыльев, имеющих несимметричный плосковыпуклый профиль и смонтированных между внутренней и концевой шайб в сборке с перекрытием каждой задней кромкой последующей передней таким образом, что, повторяя выпукло-вогнутый профиль стреловидного крыла с двумя равновеликими щелевыми проходами, образуют среднюю аэродинамическую хорду (САХ) в их сборке равной 15/16 от суммы фактических САХ трех их крыльев, переднее и заднее из которых выполнены равновеликими по ширине и с меньшей их САХ, имеющей величину 3/4 от САХ среднего более широкого крыла, причем в несущей схеме с ДРС при вертикальном взлете/посадке и висении мощность двигателей силовой установки (СУ), перераспределяемая главным и промежуточным редукторами на несущий винт и четырехвинтовую ДРС соответственно 80% и 20% от располагаемой взлетной ее мощности, а 20% мощности из которых, передаваемых соответственно на два средних флюгерно-реверсивных винта в кольцевых каналах левый с правым и на два меньших винта верхний с нижним в соответствующих в кольцевых каналах распределяются соответственно 10% и 12% между ними, а 10% и 12% мощности из которых, в свою очередь, распределяются поровну между винтами в каждой из соответствующих их группах, а при создании маршевой тяги для горизонтального поступательного скоростного полета с обеспечением как третьей большей и второй средней, так или первой меньшей скорости соответственно после как вертикального, так или короткого взлета в полетной конфигурации вертолета и крылатого автожира или винтокрыла в перегрузочном его варианте на 5% или 15% больше от нормального взлетного веса при вращающемся несущем винте соответственно на режимах авторотации или близком к его самовращению при создании им пропульсивной тяги совместно с маршевой тягой средних винтов в кольцевых каналах, обеспечиваемой работающими двигателями, выдающими 60% или 70% от взлетной мощности СУ, 55% мощности из которых перераспределяется через кормовой выходной вал главного редуктора и промежуточный редуктор на средние винты в кольцевых каналах, а остальные из 60% или 70% мощности перераспределяются через главный редуктор на несущий винт, но и обратно, при этом система трансмиссии, включающая многопоточный двухуровневый главный редуктор, обеспечивающий передачу взлетной мощности, например, от турбодизельных или турбовальных двигателей (ТДД или ТВаД), расположенных в моторном отсеке фюзеляжа, к несущему винту посредством основного выходного вала главного редуктора, имеющего кормовой выходной продольный вал, связанный с входным валом заднего промежуточного редуктора четырехвинтовой ДРС, выполненного в поперечной плоскости крестообразной конфигурации с вертикальными верхним и нижним и поперечными левым и правым выходными валами, связанными соответственно с двумя меньшими и двумя средними винтам в кольцевых каналах, причем входные валы нижнего уровня главного редуктора, расположенные по направлению полета за центром масс и по обе стороны от оси симметрии, связаны с двумя ТДД, размещенными сзади от соответствующих входных валов и выполненными для отбора взлетной их мощности с передним выводом вала, каждый из последних, образуя синхронизирующую систему, снабжен муфтой свободного хода, выдающей, отключая от топливной системы и трансмиссии в горизонтальном скоростном полете любой избыточный ТДД и один любой в случае его отказа или оба ТДД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в крылатый автожир или вертолет с автоматическим открытием верхней части контейнера с парашютами соответственно для горизонтального полета с работающими средними винтами и на режиме близком к самовращению несущего винта или аварийной посадки с парашютной системой и авторотирующим несущим винтом, при этом отклонение закрылок с флапперонами на нижнем КОС выполняется автоматически на минимальный или максимальный угол и изменяется соответственно от скорости, высоты полета или на режиме аварийной посадки с авторотирующим несущим винтом при флюгерном положении средних винтов с одновременным автоматическим ускоренным отклонением вниз как закрылок нижнего КОС, так и синфазным отклонением вниз рулей высоты.
Кроме того, с целью увеличения пропульсивной тяги и повышения скорости горизонтального поступательного полета верхний и нижний кольцевые каналы с меньшими толкающими винтами, имеющими одинаковое направление их вращение между собой, снабжены возможностью во время крейсерского полета их синхронного поворота внутри соответствующего киля на угол 90° вокруг вертикальной их оси, таким образом, что пропульсивные их тяги после соответствующего поворота, направленные строго по плоскости симметрии, создающие в поперечной плоскости совместно с двумя пропульсивными тягами средних винтов, имеющих одинаковое направление их вращение между собой, но противоположное с меньшими винтами и смонтированных в поворотных кольцевых каналах, как бы две пары сил, одна из них разнесена от продольной оси хвостовой балки по вертикали, а другая - по горизонтали, при этом меньшие и средние винты, представляющие собой многолопастные вентиляторы, выполнены с большой круткой их лопастей и смонтированы в кольцевых каналах небольшой длины, причем он выполнен с возможностью как опционального управления при ручном пилотировании, так и с рабочей станцией в двухместном экипаже для дистанционного управления другим при их совместном групповом использовании, при этом для увеличения беспосадочного полетного времени выдвижная подфюзеляжная его штанга выполнена с возможностью приема и подачи в топливные баки авиатоплива, перекачиваемого с самолета-носителя, снабженного системой дозаправки в воздухе, причем законцовка нижнего киля за вспомогательной опорой заднего колеса, выполненная в виде раскрываемого контейнера, снабжена системой предохранительного баллонета, который до приземления автоматически надувается бортовым эжекторным устройством и, защищая нижний киль от ударной нагрузки, совместно с энерго поглощающими стойками колесного шасси смягчает приземление или аварийную посадку на парашютной спасательной системе.
Кроме того, с целью возможности взаимодействия с пилотируемым самолетом-носителем (ПСН) он снабжен возможностью выполнения технологии или десантирования на парашюте, или стыковки/расстыковки с выдвижным ответным узлом жесткой системы крепления ПСН, оснащенного низкорасположенным передним горизонтальным оперением (ПГО) с рулями высоты, имеющим возможность изменения угла стреловидности ПГО и синхронного отклонения в плоскости хорды его консолей назад и вперед на углы как с обратной (χ=-10°), так и до прямой (χ=+30°) стреловидности, но и обратно, соответствующие условиям, повышающим продольную устойчивость соответственно как при взлете-посадке ПСН и выдвижении назад из заднего люка верхней балки с узлом жесткой системы крепления, так и крейсерском полете, а выдвижная по продольной оси ПСН с раскрытого заднего люка верхняя балка, имеющая на ее конце узел стыковки/расстыковки жесткой системы крепления и для его приема на борт, и для обратной операции во время барражирующего полета ПСН, снабженного нижней с дистанционным управлением грузовой лебедкой, снабженной тросом, имеющим на его конце конусный ловитель с захватом, позволяющим на расстоянии кратно превышающим вылет выдвижной балки ПСН совершить безопасный подлет к нему в полетной конфигурации вертолета и выполнить после выравнивания скоростей их полета предварительное пристыковывание посредством гибкой системы крепления с ответной частью, размещенной на конце нижней выдвижной его штанги, и выполнен трансформируемым в полетную конфигурацию самолета-биплана посредством остановки упомянутого несущего его винта и складывания соответствующих двух его лопастей с одновременным поворотом меньших винтов для увеличения движительной его системы с двух- в четырехвинтовую, при этом после совершения вертолетом трансформации в четырехвинтовой самолет-биплан и со сложенным упомянутым несущим винтом и предварительного его пристыковывания к ПСН гибкой системой, которая грузовой лебедкой подтягивает к основному узлу стыковки/расстыковки жесткой системы захвата и крепления с автоматическим соблюдением его автопилотом как соосности двух узлов стыковки жесткой системы захвата и крепления, так и поступательного подлета равновеликого с требуемым при этом его подтягиванием вдоль оси ПСН грузовой лебедкой к основному верхнему узлу жесткой системы крепления на конце выдвижной балки ПСН, который, взаимодействуя с ответной частью узла жесткой системы его крепления, расположенного в передней части каплевидного обтекателя верхнего его крыла, и пристыковываясь, обеспечивая жесткую систему крепления, происходит складывание частей верхнего стреловидного крыла и поворачивания в ниши консолей КОС и втягивание с ним верхней балки ПСН в грузовой отсек и одновременным автоматическим подкручиванием троса гибкой системы крепления ПСН, но и его приема после выпуска шасси на борт последнего, причем при беспарашютном десантировании со средней высоты полета до 4000 м с использованием выдвижной балки ПСН производится в обратном порядке, только после срабатывания узлов при расстыковке жесткой системы крепления, а отделение от нее производится после запуска его двигателей двумя способами или в полетной конфигурации вертолета, или самолета-биплана соответственно с вращающимся нагруженным несущим винтом или со сложенным несущим винтом, а его отделение от гибкой системы крепления осуществляется в бес- и буксировочном полете соответственно одновременно и после убирания балки в грузовой отсек транспортного ПСН.
Кроме того, с целью повышения аэродинамического качества упомянутый несущий винт с фиксированной остановкой и автоматическим складыванием лопастей, выполнен трехлопастным и смонтирован на телескопическом валу его вращения, но и снабжен после складывания назад по полету соответствующих двух лопастей возможностью последующего его опускания и размещения со сложенными его лопастями в автоматически раскрываемом верхнем надфюзеляжном обтекателе, при этом с целью упрощения конструкции, исключения поперечных валов трансмиссии и достижения в полетной конфигурации самолета-биплана высоких скоростей полета до 750 км/ч за счет создания пропульсивной реактивной тяги силовая установка снабжена двумя задними турбовинтовентиляторными двигателями с большой степенью двухконтурности, смонтированными на поворотных консолях упомянутого стабилизатора таким образом, что их турбокомпрессоры установлены в гондолах на верхней части стабилизатора, а закопотированные кольцевые обтекатели с многолопастными винтовентиляторными движителями, выполненными в виде флюгерно-реверсивных соосных пропеллеров с противоположным их вращением и большой круткой их саблевидных лопастей, вынесены за передние кромки стабилизатора, образуя с последними в точках их соприкосновения совместную удобообтекаемую конструкцию.
Благодаря наличию отличительных признаков предлагаемого изобретения от указанного выше известного скоростного вертолета модели Lockheed АН-56 «Cheyenne» (США), наиболее близкого к нему, является то, что возможно реализовать беспилотный скоростной десантируемый вертолет (БСДВ), который, являясь компонентом летающего авианосца, выполнен как по технологии многорежимного аэродинамического управления, обеспечивающего разновеликими винтами сверхманевренность и балансировку по тангажу, крену и курсу, так и аэродинамической схеме биплан, создающей распределенную разгрузку авторотирующего ненагруженного несущего винта без управления циклического изменения его шага и с жестким креплением его лопастей, смонтированного на полой опоре, установленной соосно внутри вала несущего винта, которая жестко закреплена своим нижним концом к корпусу внутренней нижней части главного редуктора несущего винта, а верхним сцентрирована относительно его вала при помощи подшипникового узла таким образом, что выступающая из вала верхняя часть полой опоры закреплена в каплевидном обтекателе, имеющем в передней части ответную часть узла стыковки/расстыковки жесткой системы крепления, а в верхней автоматически раскрываемой части контейнер с вытяжным и основным парашютами, стропы последнего закреплены на верхней части полой опоры, которая смонтирована совместно с узлом стыковки/расстыковки и центропланом стреловидного верхнего крыла, образующего с низкорасположенным прямым крылом обратной стреловидности (КОС) как бы схему биплан большой высоты с крыльями большого удлинения и выносом концевых хорд нижнего и верхнего крыла от их корневых хорд вперед и назад по полету соответственно со стреловидностью по передней их кромкам χ=-20° и χ=+20°, образующим с разнонаправленной стреловидностью Х-образную в плане конфигурацию, но и концепции заднего размещения четырехвинтовой ДРС как с рулевыми верхним и нижним винтами, так и тягово-рулевыми с отклоняемым вектором тяги винтами в левом и правом кольцевых каналах, создающими при вертикальном взлете/посадке или висении соответственно разновеликие и равновеликие тяги для соответствующего как управления по крену и курсу с компенсацией реактивного момента, возникающего при вращении несущего винта, так и интенсивной обдувкой предварительно синфазно отклоненных развитых рулей высоты, изменяющих продольную балансировку и установленных на выходе снизу и сверху от центра каждого кольцевого канала. При этом управляющие моменты для поперечной балансировки осуществляются при разновеликой тяге верхнего и нижнего меньших винтов совместно при дифференциальном отклонении рулей высоты левого и правого кольцевых каналов и их последующем обдуве соответствующими средними винтами. Левый и правый средние винты в кольцевых каналах смонтированы на консолях стреловидного стабилизатора за вертикальным оперением, образующим как бы крестообразное хвостовое оперение, верхний и нижний трапециевидные кили которого, имеющие профили с их толщиной равновеликой длине соответствующего кольцевого канала с меньшим винтом, нижний киль из которых снабжен на его законцовке амортизационной стойкой заднего колеса и рулем направления, выполненным в виде цельно-поворотной концевой части, обеспечивающей стойке заднего колеса возможность управляемого разворота кормовой части его фюзеляжа при рулении и на земле. Консоли нижнего КОС, выполненные с возможностью синхронного их поворота в плоскости хорды крыла вперед по полету и поворачивания их в соответствующие боковые ниши при трансформации схемы биплан в моноплан и для удобства его размещения в грузовом отсеке самолета-носителя. В несущей схеме с ДРС при вертикальном взлете/посадке и висении мощность двигателей СУ, перераспределяемая главным и промежуточным редукторами на несущий винт и четырехвинтовую ДРС соответственно 80% и 20% от располагаемой взлетной ее мощности, а 20% мощности из которых, передаваемых соответственно на два средних флюгерно-реверсивных винта в кольцевых каналах левый с правым и на два меньших винта верхний с нижним в соответствующих в кольцевых каналах распределяются соответственно 10% и 12% между ними, а 10% и 12% мощности из которых, в свою очередь, распределяются поровну между винтами в каждой из соответствующих их группах, а при создании маршевой тяги для горизонтального поступательного скоростного полета с обеспечением как третьей большей и второй средней, так или первой меньшей скорости соответственно после как вертикального, так или короткого взлета в полетной конфигурации вертолета и крылатого автожира или винтокрыла в перегрузочном его варианте на 5% или 15% больше от нормального взлетного веса при вращающемся несущем винте соответственно на режимах авторотации или близком к его самовращению при создании им пропульсивной тяги совместно с маршевой тягой средних винтов в кольцевых каналах, обеспечиваемой работающими двигателями, выдающими 60% или 70% от взлетной мощности СУ, 55% мощности из которых перераспределяется через кормовой выходной вал главного редуктора и промежуточный редуктор на средние винты в кольцевых каналах, а остальные из 60% или 70% мощности перераспределяются через главный редуктор на несущий винт, но и обратно.
Система трансмиссии, включающая многопоточный двухуровневый главный редуктор, обеспечивающий передачу взлетной мощности, например, от ТДД, расположенных в моторном отсеке фюзеляжа, к несущему винту посредством основного выходного вала главного редуктора, имеющего вспомогательный выходной продольный вал, связанный с входным валом кормового промежуточного редуктора четырехвинтовой ДРС, выполненного в поперечной плоскости крестообразной конфигурации с вертикальными верхним и нижним и поперечными левым и правым выходными валами, связанными соответственно с двумя меньшими и двумя средними винтам в кольцевых каналах. Входные валы нижнего уровня главного редуктора, расположенные по направлению полета за центром масс и по обе стороны от оси симметрии, связаны с двумя ТДД, размещенными сзади от соответствующих входных валов и выполненными для отбора взлетной их мощности с передним выводом вала, каждый из последних, образуя синхронизирующую систему, снабжен муфтой свободного хода, выдающей, отключая от топливной системы и трансмиссии в горизонтальном скоростном полете любой избыточный ТДД и один любой в случае его отказа или оба ТДД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в крылатый автожир или вертолет с автоматическим открытием верхней части контейнера с парашютами соответственно для горизонтального полета с работающими средними винтами и на режиме близком к самовращению несущего винта или аварийной посадки с парашютной системой и авторотирующим несущим винтом. Что позволит повысить скорость, высоту и дальность полета сверхманевренного БСДВ с технологией многорежимного аэродинамического управления балансировкой по тангажу, крену и курсу и компенсацией реактивного крутящего момента посредством четырехвинтовой движительно-рулевой системы при выполнении технологии вертикального и короткого взлета/посадки (ВВП и КВП), но и короткого взлета и вертикальной посадки (КВВП), особенно, после его десантирования с транспортного ПСН, имеющего с раскрытого заднего люка выдвижную верхнюю балку с узлом стыковки/расстыковки на ее конце как для приема его на борт, так и для обратной операции. Кроме того, при вертикальном подъеме грузов это позволит увеличить полезную нагрузку, взлетный вес и весовую отдачу, но и повысить безопасность с парашютной системой спасение, а также транспортную и топливную эффективность при скоростном горизонтальном полете и, особенно, многоцелевого БСДВ тяжелого класса
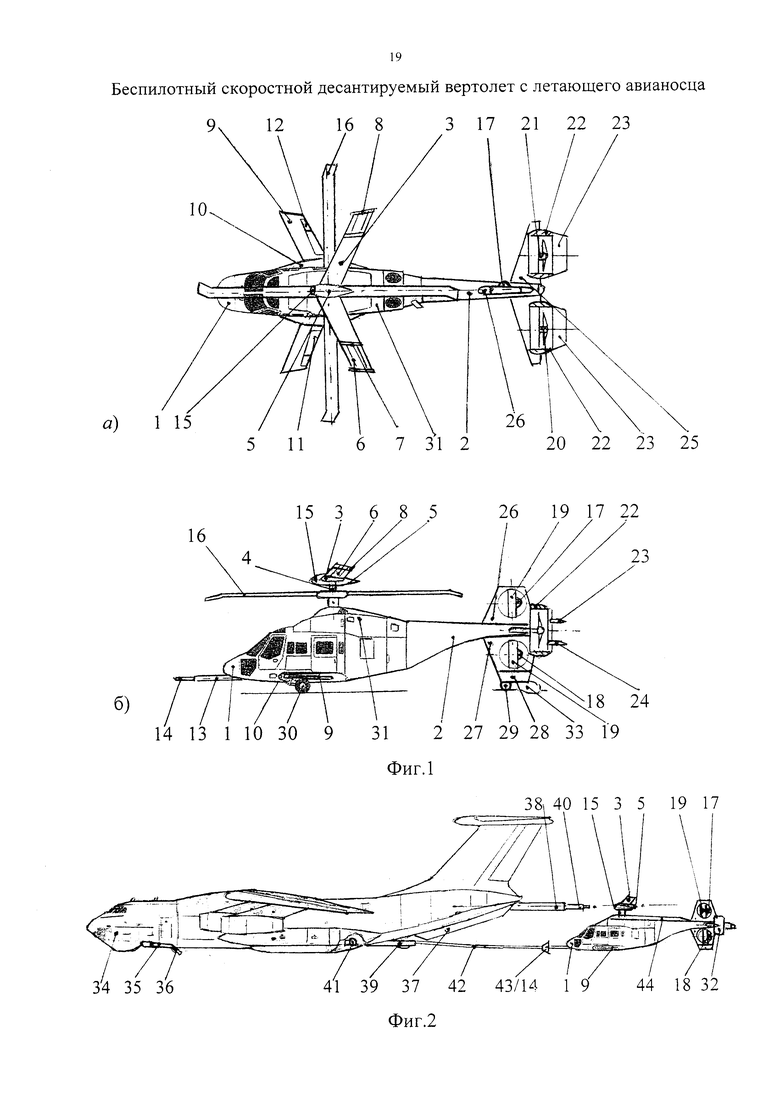
Предлагаемое изобретение БСДВ с летающего авианосца и одновинтовой несущей схемой, винт которой без автомата перекоса с четырехвинтовой ДРС обеспечивают варианты возможного его использования в условиях различной полетной конфигурации, которые иллюстрируются общими видами, представленными на фиг. 1.
На фиг. 1 изображен БСДВ при возможном его использовании на общих видах сверху и сбоку соответственно а) и б) с нижним и верхним крыльями схемы биплан, образующими Х-образное крыло в плане, разгружающее нагруженный несущий винт:
а) в полетной конфигурации вертолета с четырехлопастным несущим винтом, нижним КОС, с верхним стреловидным крылом, имеющим трехэлементные разрезные устройства, и с расположенными в кольцевых каналах на конце фюзеляжа двумя меньшими, но и двумя средними винтами с рулями высоты, создающими управление по курсу и крену, но и тангажу при висении и скоростном горизонтальном его полете;
б) в полетной конфигурации крылатого автожира или винтокрыла с несущей и движительной системами, включающей соответственно крылья схемы биплан с несущим винтом, авторотирующим или вращающимся на режиме близком самовращению, и два средних с двумя меньшими винтами в кольцевых каналах, создающих дополнительную пропульсивную тягу при крейсерском полете со скоростью 480 км/ч.
На фиг. 2 изображен БСДВ в полетной конфигурации самолета-биплана со сложенным несущим винтом в верхнем надфюзеляжном обтекателе и с двумя турбовинтовентиляторными двигателями на цельно-поворотных консолях стабилизатора реактивной движительной системы при его взаимодействии с транспортным ПСН в составе летающего авианосца при выполнении после предварительной стыковки узлами (нижней) гибкой системы крепления операции равновеликого его подлета и подтягивания грузовой лебедкой к узлам стыковки (верхней) жесткой системы крепления, размещенной на конце выдвижной балки ПСН и обтекателе верхнего крыла БСДВ.
Беспилотный скоростной десантируемый вертолет с летающего авианосца, представленный на фиг. 1 и 2, содержит фюзеляж 1 с плавно образованной тонкой хвостовой балкой 2 и верхнее стреловидное крыло 3, смонтированное на полой опоре 4 в обтекателе 5, имеет положительный угол поперечного V и на его концах цельно-поворотные трехэлементные разрезные устройства 6, установленные между внутренних 7 и концевых 8 плоских профилированных шайб. Нижнее крыло схемы биплан, представляющее собой прямое КОС 9 с корневыми обтекателями 10. Крылья 3 и 9 схемы биплан большой высоты имеют наивыгоднейший тонкий профиль, обеспечивающие необходимый и достаточный прирост подъемной силы с крейсерского полета на переходный и взлетно-посадочный режимы. Консоли КОС 9, выполненные с возможностью их поворота и размещения в боковых нишах (на фиг. 1 не показано), оснащены закрылками 11 и внешними флапперонами 12 (см. фиг. 1а), имеющими возможность их отклонения на углы 20°/40° и 75° соответственно при взлете/посадке с коротким разбегом/пробегом и вертикальном взлете, посадке или висении. В носовой части под фюзеляжем 1 по продольной его оси смонтирована выдвижная штанга 13, имеющая вынесенную за диск вращения лопастей несущего винта на ее конце ответную часть узла 14 стыковки/расстыковки гибкой системы захвата, крепления и подтягивания. Каплевидный обтекатель 5 крыла 3 имеет в передней части ответную часть узла 15 стыковки/расстыковки жесткой системы крепления, а в автоматически раскрываемой верхней части - контейнер с вытяжным и основным парашютами (на фиг. 1 не показано), стропы последнего закреплены на верхней части полой опоры, которая смонтирована совместно с узлом стыковки/расстыковки и центропланом верхнего крыла 3. Концевые части крыла 3, выполненные отклоняющимися (на фиг. 1 не показано) вниз и складывающимися по бортам фюзеляжа 1 (только после складывания двух соответствующих лопастей несущего винта) для удобства размещения в грузовом отсеке ПСН и возможности эксплуатации на летающих авианосцах.
В несущей одновинтовой схеме с ДРС, имеющей четырехлопастной несущий винт 16, выполненный без автомата перекоса, смонтирован на вертикальной опоре 4, проходящей внутри вала несущего винта 16 и установленной между главным редуктором (на фиг. 1 не показано) и каплевидным обтекателем 5 верхнего стреловидного крыла 3, образующего с нижним КОС 9 схему биплан с Х-образной конфигурацией в плане (см. фиг. 1a), но и содержит заднюю четырехвинтовую движительно-рулевую систему, включающую рулевые верхний 17 и нижний 18 меньшие винты в кольцевых каналах 19 (см. фиг. 1б), но и средние левый 20 и правый 21 винты в кольцевых каналах 22, имеющих на выходе верхние 23 и нижние 24 горизонтальные рули высоты, создающие соответственно при висении управление по курсу и крену, но и горизонтальную и маршевую тяги при висении и поступательном полете для обдува рулей высоты 23-24 и управления по тангажу при выполнении ВВП и КВП. Задние кольцевые каналы 22 смонтированы на стреловидном стабилизаторе 25 крестообразного хвостового оперения, верхний 26 и нижний 27 трапециевидные кили которого снабжены кольцевыми каналами 19 с рулевыми меньшими 17-18 винтами, а нижний киль из которых (см. фиг. 1б) снабжен рулем направления, выполненным в виде цельно-поворотной концевой части 28, обеспечивающей стойке заднего колеса 29 возможность совместно с передними колесами 30, смонтированными в обтекателях 10, управляемого разворота кормовой части фюзеляжа 1 БСДВ при его рулении на земле.
Дизельная силовая установка имеет два высотных ТДД, расположенных в обтекаемых гондолах 31 по обе стороны от плоскости симметрии, выступающих за обводы фюзеляжа 1. Для улучшения взлетно-посадочных характеристик и уменьшения вибрации от четырехлопастного несущего винта на режиме висения концы лопастей несущего винта 16 имеют шумопонижающие стреловидные законцовки, отогнутые вниз и противоположную сторону вращения винта 16, формирующие каждую противолежащую пару в S-образную форму в плане (см. фиг. 1а). Мощность от ТДД передается несущему 16, рулевым меньшим винтам 17 и 18 и средним винтам 20 и 21, посредством системы валов трансмиссии, связанной с главным редуктором и крестообразным в поперечной плоскости промежуточным (на фиг. 1 не показаны) редуктором винтов 17-18 и 20-21. Избыточная тяговооруженность СУ, обеспечивающая вертикальный взлет/посадку и висение, предопределяет как возможность легко реализовать выполнение технологии КВП и КВВП, так и создания дополнительной пропульсивной тяги и повышения скорости горизонтального полета до 480 км/ч. Для чего кольцевые каналы 19 с меньшими верхним 17 и нижний 18 винтами снабжены возможностью во время крейсерского полета (при достижении скорости 146 км/ч) их синхронного поворота внутри соответствующего киля 26 и 27 на угол 90° вокруг вертикальной их оси, таким образом, что горизонтальные силы их тяги после соответствующего поворота, направленные строго по плоскости симметрии, обдувая как бы щелевой проход между кольцевых каналов 22 со средними винтами 20-21, что повышает их КПД. При этом муфтами сцепления возможно в СУ отключение любого избыточного ТДД. В случае отказа одного ТДД, то возможен полет и посадка в полетной конфигурации крылатого автожира на режиме авторотации его несущего винта 16. В случае выхода из строя двух ТДД или несущего винта 16, или рулевых винтов 17-18, то возможно, используя систему спасения на парашюте, расположенную в контейнере обтекателя 5 (на фиг. 1 не показаны), совершить аварийную посадку и повысить безопасность полета. Для достижения в полетной конфигурации самолета-биплана со сложенным несущим винтом 16 в надфюзеляжном обтекателе 44 высоких скоростей полета до 750 км/ч за счет создания реактивной тяги его СУ, которая снабжена двумя задними турбовинтовентиляторными двигателями 32 с большой степенью двухконтурности (см. фиг. 2), смонтированными на поворотных консолях стабилизатора 25.
Управление БСДВ с летающего авианосца при различных режимах его полета обеспечивается общим (изменяющим силу тяги) шагом несущего винта 16 с жестким креплением его лопастей и с большой круткой средних 20-21 и рулевых меньших винтов 17-18 как при поступательном горизонтальном скоростном его полете, так и вертикальном взлете/посадке или висении посредством многорежимной аэродинамической системы управления балансировкой (МАСУБ) по крену и тангажу, но и курсу соответственно как флапперонами 12 и рулями высоты 23-24, но и рулем направления 28, так меньшими винтами 17-18 при разновеликих и равновеликих их тягах, но и предварительно синфазно отклоненными рулями высоты 23-24, обдуваемыми средними винтами 21-22, и соответственно в кормовых кольцевых каналах 19 и 22.
В полетной конфигурации крылатого автожира или винтокрыла маршевая тяга обеспечивается соответственно средними винтами 20-21 или ими же совместно с меньшими винтами 17-18 после поворота их кольцевых каналов 19, а подъемная сила создается крыльями 3-9 и несущим винтом 16 соответственно авторотирующим или вращающимся на режиме близком к самовращению (см. фиг. 1б). На режиме вертикального взлета, посадки и висения подъемная сила создается только несущим винтом 16 (см. фиг. 1в), а на режиме перехода - крыльями 3-9 и несущим винтом 16.
При висении направление полета может осуществляться как у вертолета одновинтовой несущей схемы с рулевыми меньшими винтами 17-18 поворачиваясь влево-вправо, перемещаясь вверх-вниз, поступательный полет вперед-назад, влево-вправо и в любой комбинации (см. фиг. 1б). Для соответствующей посадки на поверхность земли как при ВВП и КВП, так и аварийной посадке на парашюте используются колеса 29 и 30 с убирающимися только главными последними из них в обтекатели 10, а в последнем случае до приземления автоматически надувается баллонет 33 эжекторным устройством и защищает нижний киль 27 от ударной нагрузки (см. фиг. 1б).
После набора высоты горизонтальный полет БСДВ при максимальной полезной нагрузке может осуществляться также как у крылатого автожира. В этом случае средние винты 20-21 обеспечивают маршевую тягу, а несущий винт 16 отключается от привода двигателей СУ и он начинает авторотировать, создавая только подъемную силу меньшую подъемной силы, обеспечиваемой крыльями 3-9. Кроме того, при авторотации срыв потока на лопастях несущего винта 16 отодвигается на более высокие скорости полета, что позволит получить скорости полета до 480-500 км/ч.
При десантировании БСДВ 1 или на парашюте, или стыковки/расстыковки с выдвижным ответным узлом жесткой системы крепления ПСН 34, оснащенного низкорасположенным ПГО 35 с рулями высоты 36, выполненным с возможностью изменения угла стреловидности ПГО и синхронного отклонения в плоскости хорды его консолей назад и вперед на углы как с обратной (χ=-10°), так и до прямой (χ=+30°) стреловидности, но и обратно, соответствующие условиям, повышающим продольную устойчивость соответственно как при взлете-посадке и выдвижении из заднего люка 37 верхней балки 38 (см. фиг. 2) для выполнения операции стыковки/расстыковки, так и крейсерском его полете, но и обеспечивающего с погрузочной его рампы 39 возможность десантирования БСДВ 1 на парашюте (на фиг. 2 не показано), а также имеющего выдвижную по продольной оси ПСН 34 с раскрытого заднего люка 37 верхнюю балку 38, имеющую на ее конце узел 40 стыковки/расстыковки жесткой системы крепления и для его приема на борт, и для обратной операции во время барражирующего полета ПСН 34, снабженного нижней с дистанционным управлением грузовой лебедкой 41, снабженной тросом 42, имеющим на его конце конусный ловитель 43 с захватом, позволяющим на расстоянии кратно превышающим вылет выдвижной балки 38 ПСН 34 совершить безопасный подлет БСДВ 1 к нему в полетной конфигурации вертолета и выполнить после выравнивания скоростей их полета предварительное пристыковывание посредством гибкой системы 42 крепления с ответной частью, размещенной на конце нижней выдвижной штанги 13 БСДВ 1, который трансформируется в полетную конфигурацию вертолета-самолета посредством остановки несущего его винта 16 и складывания соответствующих его лопастей в верхний обтекатель 44 фюзеляжа 1 с одновременным поворотом меньших винтов 17-18 для увеличения движительной его системы с двух- в четырехвинтовую. Затем после подтягивания БСДВ 1 грузовой лебедкой 41 ПСН 34 к основному узлу 40 жесткой системы крепления на конце выдвижной его балки 38 который, взаимодействуя с ответной частью узла 15 жесткой системы крепления БСДВ 1, расположенного в центральной части каплевидного обтекателя 5 верхнего его крыла 3, и пристыковываясь, обеспечивая жесткую систему крепления, втягивает балку 38 с БСДВ 1 для приема его на борт ПСН 34.
Таким образом, БСДВ с летающего авианосца выполнен по технологии МАСУБ, обеспечивающей разновеликими винтами сверхманевренность и управление по тангажу, крену и курсу с компенсацией реактивного крутящего момента, и схеме биплан, создающей распределенную разгрузку ненагруженного несущего винта без управления циклического изменения его шага и с жестким креплением его лопастей, но и с задней четырехвинтовой ДРС, имеющей рулевые верхний и нижний меньшие и тяговые средние винты в соответствующих задних поворотных кольцевых каналах, позволяющих выполнение ВВП и КВП, но и десантирования с транспортного ПСН.
Очевидно, в процессе развития аэромобильных комплексов винтокрылой авиации для МЧС, широко использующем сейчас вертолеты с радиусом действия 350 км, самой жизнью будет продиктована задача освоения и БСДВ, которая технически реализуема на базе имеющихся вертолетов ("Ансат") и транспортного самолета (Ил-76).
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2667433C2 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2611480C1 |
| ТЯЖЕЛЫЙ СКОРОСТНОЙ ВИНТОКРЫЛ | 2016 |
|
RU2608122C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ С ДВИЖИТЕЛЬНО-РУЛЕВОЙ СИСТЕМОЙ | 2016 |
|
RU2629478C2 |
| СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2610326C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2664024C2 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652863C1 |
| СКОРОСТНОЙ ПРЕОБРАЗУЕМЫЙ ВИНТОКРЫЛ | 2015 |
|
RU2609856C1 |
| МНОГОВИНТОВОЙ СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2618832C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2598105C1 |
Изобретение относится к области авиации, в частности к конструкциям беспилотных скоростных вертолетов. Беспилотный скоростной вертолет, десантируемый с самолета-носителя, имеет несущий винт, двигатель, тяговые и рулевые винты, трехопорное шасси. Вертолет выполнен по технологии многорежимного аэродинамического управления, обеспечивающего разновеликими рулевыми винтами сверхманевренность и балансировку по тангажу, крену и курсу. Несущий винт, выполненный без управления циклическим шагом с жестким креплением лопастей, установлен на полой опоре, расположенной соосно внутри его вала. Опора жестко закреплена своим нижним концом к корпусу главного редуктора, а верхним сцентрирована относительно вала при помощи подшипникового узла. Верхняя часть полой опоры закреплена в каплевидном обтекателе, имеющем в передней части узел стыковки/расстыковки, а в верхней части - контейнер с вытяжным и основным парашютами. Стреловидное верхнее крыло образует с низкорасположенным прямым крылом обратной стреловидности схему биплан, образующую Х-образную в плане конфигурацию. Достигается улучшение управляемости при висении, возможность выполнения десантирования и стыковки/расстыковки с самолетом-носителем. 2 з.п. ф-лы, 2 ил.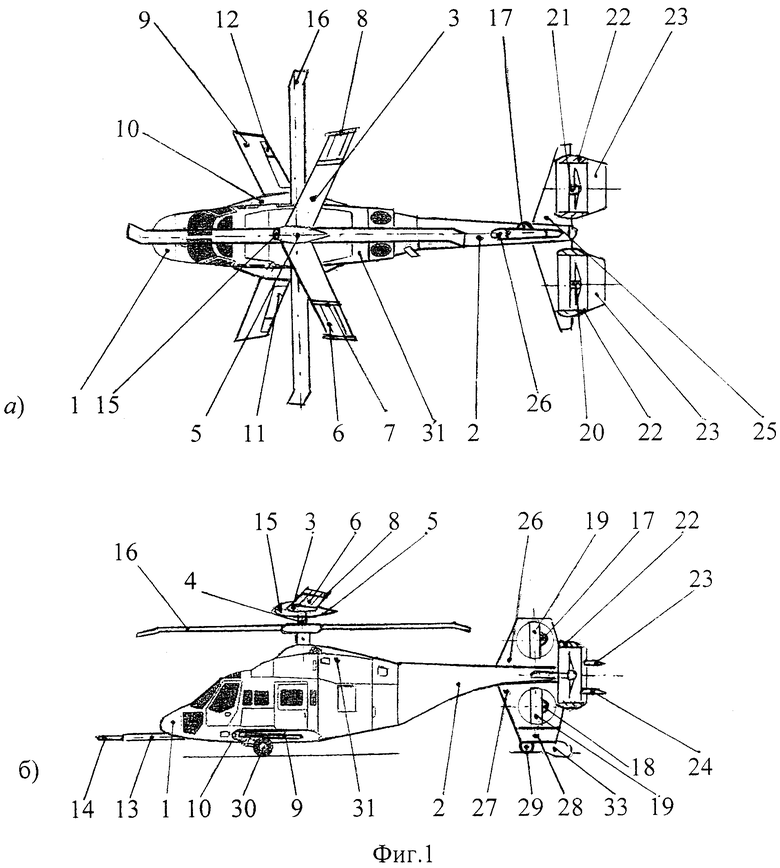
1. Беспилотный скоростной вертолет, десантируемый с самолета-носителя, имеющий одновинтовую несущую схему с рулевым винтом, содержит один двигатель, передающий крутящий момент через главный редуктор и систему соединительных валов на несущий винт, смонтированный отклоненным вперед по полету, но и на тяговый и рулевой винты, установленные на концах соответственно хвостовой балки и левой консоли стабилизатора Т-образного оперения и трехопорное шасси, имеющее главные опоры с передними колесами, убирающимися в боковые наплывы среднерасположенного крыла, отличающийся тем, что он выполнен как по технологии многорежимного аэродинамического управления разновеликими рулевыми винтами, так и аэродинамической схеме биплан, создающей распределенную разгрузку авторотирующего или нагруженного несущего винта без управления циклического изменения его шага и с жестким креплением его лопастей, смонтированного на полой опоре, установленной соосно внутри вала несущего винта, которая жестко закреплена своим нижним концом к корпусу внутренней нижней части главного редуктора несущего винта, а верхним сцентрирована относительно его вала при помощи подшипникового узла таким образом, что выступающая из вала верхняя часть полой опоры закреплена в каплевидном обтекателе, имеющем в передней части ответную часть узла стыковки/расстыковки жесткой системы крепления, а в верхней автоматически раскрываемой части - контейнер с вытяжным и основным парашютами, стропы последнего закреплены на верхней части полой опоры, которая смонтирована совместно с узлом стыковки/расстыковки и центропланом стреловидного верхнего крыла, образующего с низкорасположенным прямым крылом обратной стреловидности (КОС) как бы схему биплан большой высоты с крыльями большого удлинения и выносом концевых хорд нижнего и верхнего крыла от их корневых хорд вперед и назад по полету соответственно со стреловидностью по передней их кромкам χ=-20° и χ=+20°, образующим с разнонаправленной стреловидностью Х-образную в плане конфигурацию, но и концепции заднего размещения четырехвинтовой движительно-рулевой системы (ДРС) как с рулевыми верхним и нижним винтами, так и тягово-рулевыми с отклоняемым вектором тяги винтами в левом и правом кольцевых каналах, развитых рулей высоты, установленных на выходе снизу и сверху от центра каждого кольцевого канала, при этом в носовой части под фюзеляжем по продольной его оси смонтирована выдвижная штанга, обеспечивающая в выдвинутом ее положении вынос за диск вращения лопастей несущего винта на ее конце ответную часть узла стыковки/расстыковки гибкой системы захвата, крепления и подтягивания, средние винты размещены на консолях стреловидного стабилизатора, смонтированного за вертикальным оперением, образующим в поперечной плоскости как бы крестообразное хвостовое оперение, верхний и нижний трапециевидные кили которого, имеющие профили с толщиной равновеликой длине соответствующего кольцевого канала с меньшим винтом, нижний киль из которых снабжен на законцовке амортизационной стойкой заднего колеса и рулем направления, выполненным в виде цельно-поворотной концевой части, обеспечивающей стойке заднего колеса возможность управляемого разворота кормовой части его фюзеляжа при рулении и на земле, при этом консоли нижнего КОС, выполненные с возможностью синхронного их поворота в плоскости хорды крыла вперед по полету и поворачивания их в соответствующие боковые ниши при трансформации схемы биплан в моноплан и для удобства его размещения в грузовом отсеке самолета-носителя, снабжены по всему их размаху односекционными закрылками с внешними флапперонами, имеющими корневую хорду в 19/11 раза больше концевой хорды и возможность их отклонения на углы 20°/40° и 75° соответственно только при повернутых из соответствующих боковых ниш консолей в полетное состояние, соответствующее условиям, образующими при максимальном их отклонении как бы КОС "обратного сужения", причем несущий четырехлопастной винт выполнен с возможностью фиксированной остановки и автоматического складывания вперед по полету соответствующих двух лопастей и с последующим их размещением по обе стороны от оси симметрии, а каждая консоль стреловидного крыла, снабженного только после складывания лопастей несущего винта возможностью синхронного поворота вниз и их расположения на соответствующих бортах фюзеляжа для удобства его размещения в грузовом отсеке самолета-носителя и имеющего положительный угол поперечного V и выпукло-вогнутый профиль, снабжена с соответствующим профилем концевой частью, выполненной в виде трехэлементного разрезного устройства с несущими поверхностями, смонтированными между его внутренней и концевой плоскими шайбами, при этом каждое разрезное устройство выполнено в виде трех разновеликих по ширине крыльев, имеющих несимметричный плосковыпуклый профиль и смонтированных между внутренней и концевой шайбами в сборке с перекрытием каждой задней кромкой последующей передней таким образом, что, повторяя выпукло- вогнутый профиль стреловидного крыла с двумя равновеликими щелевыми проходами, образуют среднюю аэродинамическую хорду (САХ) в их сборке равной 15/16 от суммы фактических САХ трех их крыльев, переднее и заднее из которых выполнены равновеликими по ширине, и с меньшей их САХ, имеющей величину 3/4 от САХ среднего более широкого крыла, причем в несущей схеме с ДРС при вертикальном взлете/посадке и висении мощность двигателей силовой установки (СУ), перераспределяемая главным и промежуточными редукторами на несущий винт и четырехвинтовую ДРС соответственно 80% и 20% от располагаемой взлетной ее мощности, а 20% мощности из которых, передаваемых соответственно на два средних флюгерно-реверсивных винта в кольцевых каналах левый с правым и на два меньших винта верхний с нижним в соответствующих в кольцевых каналах распределяются соответственно 10% и 12% между ними, а 10% и 12% мощности из которых, в свою очередь, распределяются поровну между винтами в каждой из соответствующих их группах, а при создании маршевой тяги для горизонтального поступательного скоростного полета с обеспечением как третьей большей и второй средней, так или первой меньшей скорости соответственно после как вертикального, так или короткого взлета в полетной конфигурации вертолета и крылатого автожира или винтокрыла в перегрузочном его варианте на 5% или 15% больше от нормального взлетного веса при вращающемся несущем винте соответственно на режимах авторотации или близком к его самовращению при создании им пропульсивной тяги совместно с маршевой тягой средних винтов в кольцевых каналах, обеспечиваемой работающими двигателями, выдающими 60% или 70% от взлетной мощности СУ, 55% мощности из которых перераспределяется через кормовой выходной вал главного редуктора и промежуточный редуктор на средние винты в кольцевых каналах, а остальные из 60% или 70% мощности перераспределяются через главный редуктор на несущий винт, но и обратно, при этом система трансмиссии, включающая многопоточный двухуровневый главный редуктор, обеспечивающий передачу взлетной мощности, например, от турбодизельных или турбовальных двигателей (ТДД или ТВаД), расположенных в моторном отсеке фюзеляжа, к несущему винту посредством основного выходного вала главного редуктора, имеющего кормовой выходной продольный вал, связанный с входным валом заднего промежуточного редуктора четырехвинтовой ДРС, выполненного в поперечной плоскости крестообразной конфигурации с вертикальными верхним и нижним и поперечными левым и правым выходными валами, связанными соответственно с двумя меньшими и двумя средними винтами в кольцевых каналах, причем входные валы нижнего уровня главного редуктора, расположенные по направлению полета за центром масс и по обе стороны от оси симметрии, связаны с двумя ТДД, размещенными сзади от соответствующих входных валов и выполненными для отбора взлетной их мощности с передним выводом вала, каждый из последних, образуя синхронизирующую систему, снабжен муфтой свободного хода, выдающей, отключая от топливной системы и трансмиссии в горизонтальном скоростном полете любой избыточный ТДД и один любой в случае его отказа или оба ТДД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в крылатый автожир или вертолет с автоматическим открытием верхней части контейнера с парашютами соответственно для горизонтального полета с работающими средними винтами и на режиме, близком к самовращению несущего винта или аварийной посадки с парашютной системой и авторотирующим несущим винтом, при этом отклонение закрылков с флапперонами на нижнем КОС выполняется автоматически на минимальный или максимальный угол и изменяется соответственно от скорости, высоты полета или на режиме аварийной посадки с авторотирующим несущим винтом при флюгерном положении средних винтов с одновременным автоматическим ускоренным отклонением вниз как закрылок нижнего КОС, так и синфазным отклонением вниз рулей высоты.
2. Беспилотный вертолет по п. 1, отличающийся тем, верхний и нижний кольцевые каналы с меньшими толкающими винтами, имеющими одинаковое направление их вращения между собой, снабжены возможностью во время крейсерского полета их синхронного поворота внутри соответствующего киля на угол 90° вокруг вертикальной их оси таким образом, что пропульсивные их тяги после соответствующего поворота, направленные строго по плоскости симметрии, создающие в поперечной плоскости совместно с двумя пропульсивными тягами средних винтов, имеющих одинаковое направление их вращения между собой, но противоположное с меньшими винтами, и смонтированных в поворотных кольцевых каналах как бы две пары сил, одна из них разнесена от продольной оси хвостовой балки по вертикали, а другая - по горизонтали, при этом меньшие и средние винты, представляющие собой многолопастные вентиляторы, выполнены с большой круткой их лопастей и смонтированы в кольцевых каналах небольшой длины, причем он выполнен с возможностью как опционального управления при ручном пилотировании, так и с рабочей станцией в двухместном экипаже для дистанционного управления другим при их совместном групповом использовании, при этом выдвижная подфюзеляжная штанга выполнена с возможностью приема и подачи в топливные баки авиатоплива, перекачиваемого с самолета-носителя, причем законцовка нижнего киля за вспомогательной опорой заднего колеса, выполненная в виде раскрываемого контейнера, снабжена системой предохранительного баллонета, который до приземления автоматически надувается бортовым эжекторным устройством и, защищая нижний киль от ударной нагрузки совместно с энергопоглощающими стойками колесного шасси, смягчает приземление или аварийную посадку на парашютной спасательной системе.
3. Беспилотный вертолет по п.1 или 2, отличающийся тем, что снабжен возможностью выполнения технологии десантирования на парашюте, или стыковки/расстыковки с ответными узлами крепления к самолету-носителю, выполнен трансформируемым в полетную конфигурацию самолета-биплана посредством остановки упомянутого несущего винта и складывания соответствующих двух его лопастей с одновременным поворотом меньших винтов для увеличения движительной его системы с двухвинтовой в четырехвинтовую.
| Способ получения 5/6 основного сульфата алюминия | 1961 |
|
SU146302A1 |
| US 2008237392 A1, 02.10.2008 | |||
| EP 2899118 A1, 29.07.2015 | |||
| UA 99079 C2, 10.07.2012 | |||
| US 8950698 B1, 10.02.2015.. | |||

