Изобретение относится к области авиационной техники и касается создания скоростных вертолетов, имеющих одновинтовую схему, несущий винт которой обеспечивает только вертикальную тягу и смонтирован на вертикальной опоре, установленной от главного редуктора до обтекателя высокорасположенного стреловидного крыла, образующего с нижним крылом обратной стреловидности биплан с Х-образной конфигурацией в плане, но и переднюю на концах нижнего крыла двухвинтовую движительно-рулевую систему, включающую рулевые левый и правый меньшие винты в кольцевых каналах, имеющих на выходе развитые горизонтальные рули.
Известен экспериментальный скоростной вертолет "Sikorsky Х2" компании Sikorsky (США), выполненный по двухвинтовой схеме с соосными несущими и задним толкающим винтами, имеет силовую установку с турбовальным двигателем, передающим крутящий момент через главный редуктор и систему соединительных валов трансмиссии на несущие соосные и задний толкающий винты, последний из которых установлен на конце хвостовой балки за вертикальным двухкилевым оперением, смонтированным на консолях горизонтального оперения, трехопорное убирающееся колесное шасси, с кормовой вспомогательной и главными боковыми опорами.
Признаки, совпадающие - наличие двухкилевого оперения, турбовального двигателя модели LHTEC Т800 мощностью 1340 л.с, главного редуктора и валов трансмиссии, передающих мощность четырехлопастным соосным несущим винтам диаметром 8,05 м и шестилопастному толкающему винту диаметром 1,66 м, обеспечивающими как вертикальный взлет/посадку (ВВП), так и его поступательный горизонтальный скоростной полет. Вращение несущих соосных винтов - синхронизирующее и противоположно направленное. Взлетная тяговооруженность силовой установки, позволяющая при непродолжительном времени висения достигать полезной нагрузки 1000 кг при взлетном его весе 3600 кг. Скоростной вертолет "Sikorsky Х2", имея крейсерскую скорость полета до 463 км/ч, дальность полета до 1300 км и практический потолок 7200 м, может применяться для транспортировки 5…6 человек.
Причины, препятствующие поставленной задаче: первая - это то, что вертолет с движителем двухвинтовой соосной схемы и с задним толкающим винтом, используемым только на крейсерских режимах полета, что увеличивает паразитную массу при выполнении ВВП и уменьшает весовую отдачу и радиус действия. Вторая - это то, что вес заднего винта вместе с двухкилевым оперением и агрегатами трансмиссии заднего винта составляет до 12-15% веса пустого вертолета и имеет тенденцию к увеличению с ростом взлетного его веса. Третья - это то, что при висении соосное расположение несущих винтов изменяемого шага и с управлением циклического шага нижнего из них значительно осложняет их конструкцию, а постоянные вибрации, возникающие при работе автомата его перекоса, создающего неблагоприятные условия для работы других механизмов и оборудования. Четвертая - это то, что соосное расположение винтов создает вредную обдувку нижнего несущего винта верхним, усложняет схему редуцирования, а также значительно увеличивает массу редуктора и его высоту, что ограничивает возможности базирования. Пятая - это то, что в вертолете двухвинтовой соосной схемы с полужестким креплением лопастей имеют место неблагоприятное взаимное влияние (индуктивные потери) соосных несущих винтов, которое в отдельных случаях может приводить и к их перехлесту. Кроме того, техническая сложность размещения над соосными несущими винтами верхнего крыла с углом (ψ>0) поперечного V исключает возможность безопасного использования средств спасения на парашюте без соприкосновения его строп с лопастями несущих винтов. Все это обеспечивает более высокий удельный расход топлива и ограничивает возможность дальнейшего повышения скорости и дальности полета, показателей транспортной и топливной эффективности, но и осложняет из-за заднего расположения на конце хвостовой балки тягового винта выполнение технологии короткого взлета/посадки (КВП), но и короткого взлета и вертикальной посадки (КВВП).
Известен скоростной гибридный вертолет "Eurocopter Х3" (ЕС), выполненный по технологии Х3 с ярусным расположением на концах высокорасположенного крыла двухвинтовой движительно-рулевой системы и над ней несущего винта, имеет силовую установку с двумя двигателями, передающими крутящий момент через главный редуктор и соединительные валы на несущий винт, смонтированный отклоненным вперед по полету, и тянущие винты, создающие при висении и управление по курсу с компенсацией крутящего момента, вертикальное двухкилевое оперение, установленное на концах стабилизатора, и трехопорное убирающееся колесное шасси.
Признаки, совпадающие - наличие высокорасположенного крыла, двухкилевого оперения и двух турбовальных двигателей Turbomeca RTM322 мощностью по 2720 л.с, более сложного редуктора и трансмиссии валов с общей длиною 10,82 м, передающих мощность несущему и передним тянущим винтам. Несущий винт, имеющий автомат перекоса с управлением общего и циклического изменения его шага, предназначен для создания подъемной силы, а поступательное движение в скоростном полете обеспечивают тянущие винты, которые также предотвращают вращение вертолета на режиме висения при компенсации реактивного момента, возникающего при вращении несущего винта. Вращение несущего и передних двух винтов - синхронизирующее. Скоростной гибридный вертолет "Eurocopter Х3", выполненный на платформе вертолета модели ЕС 155 с рядом агрегатов от ЕС 175, оснащен крылом, которое, имея большое отрицательное поперечное V, снижает нагрузку на несущий винт и обеспечивает до 80% общей подъемной силы при горизонтальном полете и позволяет летать на 50% быстрее и выше, чем современные классические вертолеты, достичь скорости до 430 км/ч, дальности полета до 1248 км и иметь практический потолок 7600 м при перевозке 16 человек с топливной эффективностью 80,67 г/пасс⋅км (с учетом резерва топлива для выполнения получасового полета). Взлетная тяговооруженность силовой установки, позволяющая при использовании 70% ее мощности, иметь целевую нагрузку 1600 кг и увеличить взлетный вес вертолета модели ЕС 155 на 30%.
Причины, препятствующие поставленной задаче: первая - это то, что вертолет одновинтовой несущей схемы с передними винтами на концах консолей крыла, используемыми как при висении в качестве рулевых винтов, так и на крейсерских режимах полета в качестве двухвинтовых движителей, имеет повышенное аэродинамическое сопротивление, сложную схему редуцирования при независимом вращении трех винтов, но и малую весовую отдачу и радиус действия. Вторая - это то, что в вертолете одновинтовой несущей схемы имеют место непроизводительные затраты мощности, требуемой для парирования реактивного момента от несущего двумя винта тянущими винтами составляют 12-16% от мощности, потребной для вращения несущего винта, а также необходимость агрегатов крыльевой трансмиссии тянущих винтов, имеющих почти на ≈38% меньше их тягу в сравнении с соосными закапотированными винтами и создающих опасность для наземного персонала. Третья - это то, что вес передних винтов вместе с крылом и агрегатами трансмиссии составляет до 15% веса пустого вертолета и имеет тенденцию к увеличению с ростом взлетного его веса. Четвертая - это то, что крыло и хвостовое оперение не имеют механизации и поверхностей управления, что предопределяет для управления по крену и тангажу необходимость постоянного вращения нагруженного несущего винта с автоматом перекоса и при авторотации последнего не позволяет использовать его для продольно-поперечного управления. Пятая - это то, что расположение двух тянущих винтов под несущим винтом создает вредное сопротивление, приводящее к их разнотяговости, но и к значительному повышению уровня шума вследствие взаимовлияния тянущих винтов и несущего винта. Кроме того, в такой конструкции, не исключается появление самовозбуждающихся колебаний, высоких переменных напряжений и вибраций, а также и других видов динамической неустойчивости конструкции, в том числе одного из опаснейших - воздушного резонанса несущего винта и, особенно, не закапотированных тянущих винтов. Шестая - это то, что при висении поток от несущего винта, обдувая консоли крыла и создавая значительную общую потерю в вертикальной его тяге, затормаживается и большие скорости потока отбрасываемого от них предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги несущего винта и создавать ситуацию неуправляемого падения, что снижает стабильность управления и безопасность. А по мере роста скорости горизонтального полета проблема также усугубляется, поскольку на отступающей стороне несущего винта возникает участок, в котором абсолютная скорость его лопастей относительно воздуха становится практически нулевой и этот участок лопастей, естественно, в создании подъемной силы не участвует, что ухудшает уравновешивание в поперечном канале, особенно, из-за расположения этого участка как раз над прямым крылом. Седьмая - это то, что несущий винт изменяемого шага и с управлением циклического его шага значительно осложняет конструкцию, а постоянные вибрации, возникающие при работе автомата его перекоса, создающего неблагоприятные условия для работы других механизмов и оборудования. Кроме того, отсутствие над несущим винтом верхнего крыла с углом (ψ>0) поперечного V исключает возможность безопасного использования средств спасения на парашюте без соприкосновения его строп с лопастями несущего винта. Все это ограничивает при более высоком удельном расходе топлива возможность повышения дальности полета, показателей транспортной и топливной эффективности, но и уменьшения при висении непроизводительных затрат мощности, особенно, при управлении по курсу.
Наиболее близким к предлагаемому изобретению является вертолет-самолет-амфибия [патент RU 2310583 от 15.11.2005], содержащий на пилоне несущий винт и под ним с ярусным расположением тянущие винты в кольцевых каналах, установленных на поворотных консолях крыла, имеет силовую установку, включающую два двигателя, передающих крутящий момент через главный редуктор и соединительные валы на несущий винт, смонтированный отклоненным вперед по полету, и тянущие винты, создающие при висении подъемную силу и управление по крену, газовые струйные рули путевого и продольного управления, размещенные на конце хвостовой балки за хвостовым оперением, и трехопорное убирающееся колесное шасси.
Признаки, совпадающие - наличие на пилоне двухлопастного несущего винта, имеющего шумопонижающие стреловидные законцовки отогнутые вниз и противоположную сторону его вращения, и под ним на поворотных консолях высокорасположенного крыла, имеющих диапазон поворота от -5° до+95°с двумя тянущими винтами в кольцевых каналах, создающими горизонтальную и соответствующим их отклонением на угол 90° - вертикальную тягу или наклонную тягу - на угол 30° соответственно при выполнении ВВП и КВП, но и КВВП с перегрузочным взлетным весом и оснащенных в их центре редукторами винтов. Последние связаны соединительными валами с главным редуктором, приводимым турбовальыми двигателями, которые снабжены газоотводящими системами для газовых струйных рулей путевого и продольного управления, смонтированных на конце хвостовой балки.
Причины, препятствующие поставленной задаче: первая - это то, что ярусное расположение двух винтов в кольцевых каналах на поворотных консолях высокорасположенного крыла с углом (ψ=0) поперечного V и над ними несущего винта предопределяет увеличение его габаритных размеров по высоте, затрудняющих его базирование. Это также приводит и к уменьшению габаритных размеров поворотных кольцевых каналов и, как следствие, винты выполнены небольшого диаметра. Поэтому при создании ими вертикальной тяги, образуя малую ометаемую площадь, вызывают значительную нагрузку на нее и большую скорость отбрасываемого воздушного потока от поверхности, ухудшающего взаимовлияние винтов, особенно работающих по тянущей схеме и при одинаковом направлении вращения несущего и тянущих консольных винтов. Вторая - это то, что винты, смонтированные на поворотных консолях высокорасположенного крыла в кольцевых каналах, имеют близкое расположение их линий вертикальной тяги от центра масс, что осложняет поперечную управляемость как на вертолетных, так и на переходных режимах полета. Третья - это то, что турбовальные двигатели снабжены газовыми рулями путевого и продольного управления. Подобная схема увеличивает сложность и массу конструкции, приводит к необходимости увеличения длины хвостовой балки с газоотводящей удлинительной сопловой трубкой и к взаимовлиянию путевого и продольного управления, приводящие к запаздыванию путевого управления на 0,5-1 секунды по сравнению с управлением рулевым винтом. Кроме того непроизводительные затраты мощности, требуемые для парирования реактивного крутящего момента несущего винта реактивными соплами составляют 8-10% от мощности силовой установки. Все это ограничивает возможность повышения путевой и продольной управляемости и, следовательно, сверхманевренности при висении, а также дальнейшего повышения взлетного веса и полезной нагрузки, дальности полета и показателей транспортной эффективности.
Предлагаемым изобретением решается задача в указанном выше известном вертолете-самолете-амфибии упрощения конструкции и исключения как узлов поворота консолей крыла с кольцевыми каналами, так и газовых струйных рулей продольного и путевого управления, увеличения полезной нагрузки, улучшения весовой отдачи и уменьшения потребной мощности на путевую балансировку при висении, улучшения поперечной и продольной управляемости, повышения дальности полета, но и показателей транспортной и топливной эффективности, а также повышения безопасности.
Отличительными признаками предлагаемого изобретения от указанного выше известного вертолета-самолета-амфибии, наиболее близкого к нему, являются наличие того, что он выполнен по технологии многорежимного аэродинамического управления, обеспечивающего разновеликими винтами сверхманевренность и балансировку по тангажу, крену и курсу с компенсацией реактивного крутящего момента, и схеме биплан, создающей распределенную разгрузку при горизонтальном скоростном полете ненагруженного (авторотирующего) или вращающегося на режиме близком к самовращению несущего винта без управления циклического изменения его шага и с жестким креплением его лопастей, смонтированного на опоре, установленной соосно внутри вала несущего винта, которая жестко закреплена своим нижним концом к корпусу внутренней нижней части главного редуктора несущего винта, а верхним сцентрирована относительно его вала при помощи подшипникового узла таким образом, что выступающая из вала верхняя часть полой опоры закреплена в каплевидном обтекателе стреловидного трапециевидного крыла (СТК), образующего с упомянутым крылом, выполненным в виде прямого крыла обратной стреловидности (КОС), как бы схему биплан с высокорасположенными крыльями большого удлинения и выносом концевых хорд нижнего КОС и верхнего СТК от их корневых хорд вперед и назад по полету соответственно со стреловидностью по передним их кромкам χ=-25° и χ=+25°, образующим с разнонаправленной стреловидностью Х-образную в плане конфигурацию, но и концепции переднего размещения движительно-рулевой системы (ДРС) с винтами в упомянутых кольцевых каналах, обеспечивающей и при висении, и горизонтальном поступательном скоростном полете как пропульсивными левым и правым меньшими винтами, создающими разновеликие и равновеликие тяги для соответствующего управления по курсу и компенсации реактивного момента, возникающего при вращении несущего винта, так и, не изменяя балансировки по курсу, интенсивной обдувкой после дифференциального и синфазного отклонения развитых элевонов нижнего КОС, изменяющих соответственно поперечную и продольную балансировки, установленных на выходе снизу и сверху на величину половины радиуса меньшего винта от центра каждого кольцевого канала и имеющих отогнутые их концы к центру последнего, жестко смонтированного на стреловидной концевой части КОС, имеющей размах равный наружному радиусу кольцевого канала, при этом нижнее КОС, имеющее отрицательный угол (ψ=10°) поперечного V, снабжено по всему его размаху односекционными закрылками, имеющими корневую хорду в 19/11 раза больше концевой хорды и возможность их отклонения на углы 20°/40° и 75° соответственно при взлете/посадке с коротким разбегом/пробегом и вертикальном взлете, посадке или висении и образующими при максимальном их отклонении как бы нижнее КОС "обратного сужения", создающего в зоне максимальных индуктивных скоростей воздушного потока от несущего винта возможность и уменьшения на 8% потерь подъемной силы от обдувки консолей КОС, и препятствования обратному перетеканию воздушного потока, причем каждая консоль верхнего СТК, имеющего положительный угол (ψ=+10°) поперечного V и выпукло-вогнутый профиль, снабжена с соответствующим профилем концевой частью, выполненной в виде цельно-поворотного трехэлементного разрезного устройства с несущими поверхностями, смонтированными между его внутренней и концевой плоских шайб и обеспечивающими при вертикальной их обдувке воздушным осевым потоком от несущего винта увеличение коэффициента подъемной силы от СТК при вертикальном взлете/посадке и висении и снабженными возможностью их дифференциального отклонения в вертикальной плоскости, изменяя при этом углы их атаки, в свою очередь, образуют разновеликие подъемные силы на концах СТК и, как следствие, происходит только при висении поперечное совместное управление с соответствующим отклонением элевонов КОС, при этом каждое разрезное устройство выполнено в виде трех разновеликих по ширине крыльев, имеющих несимметричный плосковыпуклый профиль и смонтированных между внутренней и концевой шайб в сборке с перекрытием каждой задней кромкой последующей передней таким образом, что, повторяя выпукло-вогнутый профиль второго крыла с двумя равновеликими щелевыми проходами, образуют среднюю аэродинамическую хорду (САХ), в их сборке равную 15/16 от суммы фактических САХ трех их крыльев, переднее и заднее из которых выполнены равновеликими по ширине и с меньшей их САХ, имеющей величину 3/4 от САХ среднего более широкого крыла, причем в несущей схеме с ДРС, имеющей в каждом кольцевом канале КОС флюгерно-реверсивные меньшие винты, вынесенные к передней и задней кромкам кольцевого канала, образующего с нижним КОС в точках их соприкосновения совместную удобообтекаемую конструкцию, и установленные тандемом с взаимно противоположным вращением тянущего и толкающего меньших соосных винтов, и перераспределяющей при вертикальном взлете/посадке и висении мощность двигателей силовой установки (СУ) соответственно главным и промежуточными редукторами на несущий винт и ДРС с соосными винтами соответственно 85% и 15% от располагаемой взлетной ее мощности, а 15% мощности из последних, в свою очередь, распределяются поровну между двух пар многолопастных соосных винтов с большой круткой их саблевидных лопастей, как у вентилятора, а при создании ими маршевой тяги для горизонтального поступательного скоростного крейсерского полета с обеспечением как третьей большей и второй средней, так или первой меньшей скорости соответственно после как вертикального, так или короткого взлета в полетной конфигурации вертолета и крылатого автожира или винтокрыла в перегрузочном его варианте на 5% или 15% больше от нормального взлетного веса при вращающемся несущем винте соответственно на режимах авторотации или близком к его самовращению при создании им пропульсивной тяги совместно с маршевой тягой соосных винтов в кольцевых каналах, обеспечиваемой работающими двигателями, выдающими 60% или 70% от взлетной мощности СУ, 55% мощности из которых перераспределяется через поперечные V-образные как в плане, так и в поперечной плоскости выходные валы главного редуктора посредством консольных Т-образных в плане редукторов соосных винтов, а остальные из 60% или 70% мощности перераспределяются через главный редуктор на несущий винт, но и обратно, при этом система трансмиссии, включающая многопоточный двухуровневый главный редуктор, обеспечивающий передачу взлетной мощности, например, от турбовальных двигателей (ТВаД), расположенных в моторном отсеке фюзеляжа, к несущему винту и группе меньших соосных винтов в кольцевых каналах посредством соответственно вертикального выходного вала верхнего уровня главного редуктора и поперечными выходными валами нижнего уровня, имеющими выходные угловые редукторы, обеспечивающие соответствующие перегибы в поперечной плоскости с левым и правым соединительными валами, образующими с соответствующими Т-образными консольными редукторами соосных винтов как бы Н-образную с V-образной в плане перемычкой трансмиссию ДРС, причем входные валы среднего уровня главного редуктора, расположенные по направлению полета за центром масс и по обе стороны от оси симметрии, связаны с двумя ТВаД, размещенными сзади от соответствующих входных валов и выполненными для отбора взлетной их мощности с передним выводом вала, каждый из последних, образуя синхронизирующую систему, снабжен муфтой свободного хода, выдающей, отключая от топливной системы и трансмиссии в горизонтальном скоростном полете любой избыточный ТВаД и один любой в случае его отказа или оба ТВаД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в крылатый автожир или вертолет для горизонтального полета или аварийной посадки, при этом в последнем случае автоматическая установка лопастей несущего винта и соосных меньших винтов обеспечивается соответственно в авторотирующее и флюгерное положение с одновременным автоматическим ускоренным отклонением вниз как закрылок нижнего КОС, так и синфазным отклонением вниз его нижних и верхних элевонов, а для повышения безопасности каплевидный обтекатель верхнего СТК, имеющий в верхней автоматически раскрываемой части контейнер с вытяжным и основным парашютами, стропы последнего закреплены на верхней части полой опоры, что обеспечивает, защищая от ударной нагрузки совместно с энерго поглощающими стойками колесного шасси, допустимое уменьшение скорости снижения до 7 м/с, что смягчает приземление при аварийной посадке на парашютной спасательной системе.
Кроме того, с целью уменьшения аэродинамического сопротивления упомянутый пилон несущего винта, имеющий каплевидную форму в плане и при виде сбоку трапециевидную конфигурацию с обратной стреловидностью, при этом фюзеляж, имеющий основной силовой элемент в виде коробчатой балки, изготовленной из композиционных материалов, снабжен центральным основным топливным баком и с внешней стороны на балку закреплены все основные узлы и агрегаты, закрытые прикрепленными крупноразмерными панелями, формирующими внешний его контур в виде граненной формы фюзеляжа с наклонными поверхностями, имеющими радиопо-глощающие покрытия, а втулки бесшарнирного несущего винта и выходная часть полого вала, проходящая до обтекателя СТК, снабжены соответственно удобообтекае-мыми и стреловидными при виде сбоку обтекателями, причем с целью уменьшения инфракрасного излучения от работающих двигателей упомянутая система, отводящая горячие выхлопные их газы, размещена по внешним бортам хвостовой балки таким образом, что когда горячие газы смешиваются с забортным воздухом и выбрасываются охлажденными через ряд боковых щелей вдоль всей ее длины и, тем самым, уменьшая сопротивление хвостовой балки за счет эффекта отсоса пограничного слоя, улучшают ее обтекание и исключают резонансные ее колебания совместно с U-образным оперением, имеющим стреловидный стабилизатор с верхними килями большего удлинения, отклоненными по дуге наружу от плоскости симметрии и снабженными нижними килями меньшего удлинения, отклоненными с плавным их сопряжением от верхних килей наружу, образуя две боковые V-образные поперечные конфигурации.
Благодаря наличию отличительных признаков предлагаемого изобретения от указанного выше известного вертолета-самолета амфибии, наиболее близкого к нему, является то, что возможно реализовать скоростной вертолет с движительно-рулевой системой (СВДРС), который выполнен по технологии многорежимного аэродинамического управления, обеспечивающего разновеликими винтами сверхманевренность и балансировку по тангажу, крену и курсу с компенсацией реактивного крутящего момента, и схеме биплан, создающей распределенную разгрузку при горизонтальном скоростном полете ненагруженного (авторотирующего) или вращающегося на режиме близком к самовращению несущего винта без управления циклического изменения его шага и с жестким креплением его лопастей, смонтированного на опоре, установленной соосно внутри вала несущего винта, которая жестко закреплена своим нижним концом к корпусу внутренней нижней части главного редуктора несущего винта, а верхним сцентрирована относительно его вала при помощи подшипникового узла таким образом, что выступающая из вала верхняя часть полой опоры закреплена в каплевидном обтекателе СТК, образующего с упомянутым крылом, выполненным в виде прямого КОС, как бы схему биплан с высокорасположенными крыльями большого удлинения и выносом концевых хорд нижнего КОС и верхнего СТК от их корневых хорд вперед и назад по полету соответственно со стреловидностью по передним их кромкам χ=-30° и χ=+30°, образующим с разнонаправленной стреловидностью X-образную в плане конфигурацию, но и концепции переднего размещения ДРС с винтами в упомянутых кольцевых каналах, обеспечивающей и при висении, и горизонтальном поступательном скоростном полете как пропульсивными левым и правым меньшими винтами, создающими разновеликие и равновеликие тяги для соответствующего управления по курсу и компенсации реактивного момента, возникающего при вращении несущего винта, так и, не изменяя балансировки по курсу, интенсивной обдувкой после дифференциального и синфазного отклонения развитых горизонтальных рулевых поверхностей - элевонов КОС, изменяющих соответственно поперечную и продольную балансировки и установленных на выходе снизу и сверху на величину половины радиуса меньшего винта от центра каждого кольцевого канала, жестко смонтированного на законцовках нижнего КОС, при этом нижнее КОС, имеющее отрицательный угол (ψ=-10°) поперечного V, снабжено по всему его размаху односекционными закрылками, имеющими корневую хорду в 19/11 раза больше концевой хорды и возможность их отклонения на углы 20°/40° и 75° соответственно при взлете/посадке с коротким разбегом/пробегом и вертикальном взлете, посадке или висении и образующими при максимальном их отклонении как бы нижнее КОС "обратного сужения", создающего в зоне максимальных индуктивных скоростей воздушного потока от несущего винта возможность и уменьшения на 8% потерь подъемной силы от обдувки консолей КОС, и препятствования обратному перетеканию воздушного потока, причем каждая консоль верхнего СТК, имеющего положительный угол (ψ=+10°) поперечного V и выпукло-вогнутый профиль, снабжена с соответствующим профилем концевой частью, выполненной в виде цельно-поворотного трехэлементного разрезного устройства с несущими поверхностями, смонтированными между его внутренней и концевой плоских шайб и обеспечивающими при вертикальной их обдувке воздушным осевым потоком от несущего винта увеличение коэффициента подъемной силы от СТК при вертикальном взлете/посадке и висении и снабженными возможностью их дифференциального отклонения в вертикальной плоскости, изменяя при этом углы их атаки, в свою очередь, образуют разновеликие подъемные силы на концах СТК и, как следствие, происходит только при висении поперечное совместное управление с соответствующим отклонением элевонов КОС, при этом каждое разрезное устройство выполнено в виде трех разновеликих по ширине крыльев, имеющих несимметричный плосковыпуклый профиль и смонтированных между внутренней и концевой шайб в сборке с перекрытием каждой задней кромкой последующей передней таким образом, что, повторяя выпукло-вогнутый профиль второго крыла с двумя равновеликими щелевыми проходами, образуют САХ, в их сборке равную 15/16 от суммы фактических САХ трех их крыльев, переднее и заднее из которых выполнены равновеликими по ширине и с меньшей их САХ, имеющей величину 3/4 от САХ среднего более широкого крыла, причем в несущей схеме с ДРС, имеющей в каждом кольцевом канале КОС флюгерно-реверсивные меньшие винты, вынесенные к передней и задней кромкам кольцевого канала, образующего с КОС в точках их соприкосновения совместную удобообтекаемую конструкцию, и установленные тандемом с взаимно противоположным вращением тянущего и толкающего меньших соосных винтов, и перераспределяющей при вертикальном взлете/посадке и висении мощность двигателей СУ соответственно главным и промежуточными редукторами на несущий винт и ДРС с соосными винтами соответственно 85% и 15% от располагаемой взлетной ее мощности, а 15% мощности из последних, в свою очередь, распределяются поровну между двух пар многолопастных соосных винтов с большой круткой их саблевидных лопастей, как у вентилятора, а при создании ими маршевой тяги для горизонтального поступательного скоростного крейсерского полета с обеспечением как третьей большей и второй средней, так или первой меньшей скорости соответственно после как вертикального, так или короткого взлета в полетной конфигурации вертолета и крылатого автожира или винтокрыла в перегрузочном его варианте на 5% или 15% больше от нормального взлетного веса при вращающемся несущем винте соответственно на режимах авторотации или близком к его самовращению при создании им пропульсивной тяги совместно с маршевой тягой соосных винтов в кольцевых каналах, обеспечиваемой работающими двигателями, выдающими 60% или 70% от взлетной мощности СУ, 55% мощности из которых перераспределяется через поперечные V-образные как в плане, так и в поперечной плоскости выходные валы главного редуктора посредством консольных Т-образных в плане редукторов соосных винтов, а остальные из 60% или 70% мощности перераспределяются через главный редуктор на несущий винт, но и обратно.
Система трансмиссии, включающая многопоточный двухуровневый главный редуктор, обеспечивающий передачу взлетной мощности, например, от турбовальных двигателей (ТВаД), расположенных в моторном отсеке фюзеляжа, к несущему винту и группе меньших соосных винтов в кольцевых каналах посредством соответственно вертикального выходного вала верхнего уровня главного редуктора и поперечными выходными валами нижнего уровня, имеющими выходные угловые редукторы, обеспечивающие соответствующие перегибы в поперечной плоскости с левым и правым соединительными валами, образующими с соответствующими Т-образными консольными редукторами соосных винтов как бы Н-образную с V-образной в плане перемычкой трансмиссию ДРС. Входные валы среднего уровня главного редуктора, расположенные по направлению полета за центром масс и по обе стороны от оси симметрии, связаны с двумя ТВаД, размещенными сзади от соответствующих входных валов и выполненными для отбора взлетной их мощности с передним выводом вала, каждый из последних, образуя синхронизирующую систему, снабжен муфтой свободного хода, выдающей, отключая от топливной системы и трансмиссии в горизонтальном скоростном полете любой избыточный ТВаД и один любой в случае его отказа или оба ТВаД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в крылатый автожир или вертолет для горизонтального полета или аварийной посадки. При аварийной посадке обеспечивается автоматическая установка лопастей несущего винта и соосных винтов соответственно в авторотирующее и флюгерное положение с одновременным автоматическим ускоренным отклонением вниз как закрылок нижнего КОС, так и синфазным отклонением вниз его элевонов, а для повышения безопасности каплевидный обтекатель верхнего СТК, имеющий в верхней автоматически раскрываемой части контейнер с вытяжным и основным парашютами, стропы последнего закреплены на верхней части полой опоры, что обеспечивает, защищая от ударной нагрузки совместно с энерго поглощающими стойками колесного шасси, допустимое уменьшение скорости снижения до 7 м/с, что смягчает приземление при аварийной посадке на парашютной спасательной системе. Аэродинамическая схема высокорасположенный биплан, создающая распределенную разгрузку при горизонтальном скоростном полете ненагруженного (авторотирующего) или вращающегося на режиме, близком к самовращению несущего винта, особенно без управления циклического изменения его шага и с жестким креплением его лопастей, позволяет срыв потока на его лопастях отодвигать на более высокие скорости полета, что позволит исключить потерю подъемной силы из-за срыва потока с отступающих его лопастей на режиме горизонтального скоростного полета и, как следствие, достичь скорости полета 450 или 435 км/ч соответственно. Поскольку благодаря кольцевым каналам отодвигается интенсивное возрастание волнового сопротивления до достижения окружной скорости концов лопастей многолопастных меньших винтов равной 280-290 м/с и, как следствие, увеличивается статическая тяга и за соосными винами образуется воздушная струя, обладающая большой энергией, что позволяет установить на выходе кольцевых каналов и за ними эффективные аэродинамические рулевые поверхности - элевоны. Использование кольцевых каналов, обеспечивая дополнительные несущие поверхности, увеличивает подъемную силу КОС и позволяет повысить безопасность, исключая возможность соприкосновения посторонних предметов с соосными меньшими винтами. Кроме того, исключает вредную интерференцию этих винтов с несущим винтом, уменьшает акустическую сигнатуру и шумовое воздействие при их совместной работе в сравнении с винтами без кольцевых каналов, создающих аналогичную им тягу, но при высоком уровне интерференции и шума. Все это позволит повысить скорость, высоту и дальность полета сверхманевренного СВДРС с технологией многорежимного аэродинамического управления балансировкой по тангажу, крену и курсу и компенсацией реактивного крутящего момента, являющейся наиболее эффективной двухвинтовой движительно-рулевой системой при выполнении операций с вертикальным подъемом грузов, так как она обеспечивает уменьшение расхода мощности на балансировку по курсу, массы конструкции, уровня шума, вибраций, затрат на техническое обслуживание. Кроме того, это позволит также увеличить полезную нагрузку, взлетный вес и весовую отдачу, но и повысить безопасность, транспортную и топливную эффективность многоцелевого СВДРС среднего класса и, особенно, легкого с парашютной спасательной систем.
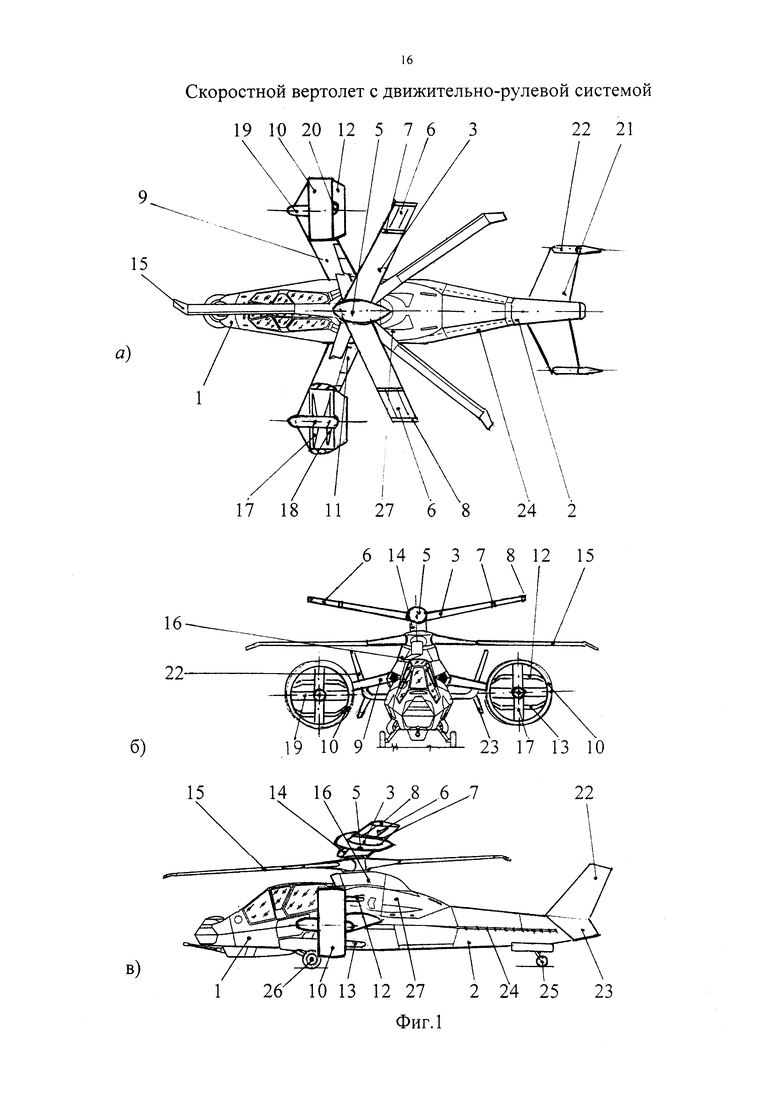
Предлагаемое изобретение многоцелевого СВДРС с одновинтовой несущей схемой и варианты возможного его использования с двухвинтовой ДРС в условиях различной полетной его конфигурации иллюстрируются общими видами на фиг. 1.
На фиг. 1 изображен СВДРС на общих видах сверху, спереди и сбоку соответственно а), б) и в) с нижним и верхним крыльями схемы биплан, образующими X-образное крыло в плане, разгружающее несущий винт при его использовании:
а) в полетной конфигурации вертолета с пятилопастным несущим винтом, нижним КОС, но и с верхним стреловидным крылом, имеющим трехэлементные разрезные устройства, так и с расположенными на концах КОС кольцевыми каналами, имеющими соосные меньшие винты и элевоны, создающие управление по крену и тангажу и при висении, и скоростном горизонтальном поступательном его полете;
б) в полетной конфигурации крылатого автожира или винтокрыла с несущей и движительной системами, включающей крылья схемы биплан совместно с несущим винтом, авторотирующим или вращающимся на режиме близком самовращению, и соосные меньшие винты в кольцевых каналах, создающие пропульсивную тягу;
в) в полетной конфигурации крылатого автожира или винтокрыла с несущей и движительной системами, включающей соответственно крылья схемы биплан с несущим винтом, авторотирующим или вращающимся на режиме, близком самовращению, и соосные меньшие винты в кольцевых каналах, создающие пропульсивную тягу при скоростном горизонтальном поступательном полете со скоростью до 450 км/ч.
Многоцелевой СВДРС, представленный на фиг. 1, содержит фюзеляж 1 с плавно образованной тонкой хвостовой балкой 2 и верхнее СТК 3, смонтированное на пустотелой опоре 4 в каплевидном обтекателе 5, имеет положительный угол поперечного V (см. фиг. 1б) и на его концах цельно-поворотные трехэлементные разрезные устройства 6, имеющие возможность дифференциального их отклонения, установлены между внутренних 7 и концевых 8 плоских профилированных шайб. Нижнее КОС 9 схемы высокорасположенного биплана имеет на его концах кольцевые каналы 10. Крылья 3 и 9 схемы биплан имеют наивыгоднейший тонкий профиль, обеспечивающие необходимый и достаточный прирост подъемной силы с крейсерского полета на переходный и взлетно-посадочный режимы. Консоли КОС 9, имеющие отрицательный угол поперечного V, оснащены как закрылками 11 (см. фиг. la), имеющими возможность их отклонения на углы 20°/40° и 75° соответственно при взлете/посадке с коротким разбегом/пробегом и вертикальном взлете, посадке или висении, так и внешними элевонами 12-13, смонтированными на выходе кольцевых каналов 10 снизу и сверху от его центра. Каплевидный обтекатель 5 крыла 3 в автоматически раскрываемой верхней его части имеет контейнер с вытяжным и основным парашютами (на фиг. 1 не показано), стропы последнего закреплены на верхней части полой опоры 4 внутри обтекателя 5, выступающая из последнего нижняя часть полой опоры 4 закрыта стреловидным при виде сбоку обтекателем 14 (см. фиг. 1в). В несущей одновинтовой схеме с ДРС, имеющей пятилопастной несущий винт 15, которой обеспечивает только вертикальную и наклонную тягу и выполнен без автомата перекоса, смонтирован на вертикальной опоре 4, размещенной в пилоне 16 обратной стреловидности и проходящей внутри вала несущего винта 15 и установленной между главным редуктором (на фиг. 1 не показано) и каплевидным обтекателем 5 верхнего СТК 3, образующего с нижним КОС 9 схему биплан с Х-образной конфигурацией в плане (см. фиг. 1 а), но и содержит переднюю двухвинтовую движительно-рулевую систему, включающую тандемные левые 17-18 и правые 19-20 соосные меньшие винты в кольцевых каналах 10 (см. фиг. 1а), имеющих на выход нижние 12 и верхние 13 элевоны, создающие соответственно при висении управление по курсу с компенсацией реактивного момента, но и горизонтальную и маршевую тяги при висении и поступательном полете для обдува элевонов 12-13 и управления по тангажу и крену при выполнении ВВП и КВП. На конце тонкой хвостовой балки 2 совместно с консолями стреловидного стабилизатора 21 смонтировано U-образное хвостовое оперение, имеющее стреловидные кили верхний 22 большего удлинения и нижний 23 меньшего удлинения, каждая пара из которых отклонена наружу от плоскости симметрии и образует две V-образные боковые конфигурации. По внешним бортам хвостовой балки 2 размещена газоструйная система, отводящая горячие выхлопные газы двух ТВаД таким образом, что когда горячие газы смешиваются с забортным воздухом и выбрасываются охлажденными через ряд боковых щелей 24 вдоль всей ее длины и, тем самым, уменьшая как инфракрасного излучения от работающих ТВаД, так и сопротивление хвостовой балки 2. Для соответствующей посадки на поверхность земли используются колеса 25 и 26 с убирающимися только главными последними из них в обтекатели фюзеляжа 1.
Силовая установка имеет два высотных ТВаД, расположенных в обтекаемых гондолах 27 по обе стороны от плоскости симметрии, выступающих за обводы фюзеляжа 1. Для улучшения взлетно-посадочных характеристик и уменьшения вибрации от пятилопастного несущего винта 15 на режиме висения концы его лопастей имеют шумопонижающие стреловидные законцовки, отогнутые вниз и противоположную сторону вращения винта 15, формирующие каждую противолежащую пару в S-образную форму в плане (см. фиг. 1а). Мощность от ТВаД передается несущему 15 и соосным меньшим винтам 17-18 и 19-20 посредством системы валов трансмиссии, связанной с главным редуктором и Т-образным в плане консольными (на фиг. 1 не показаны) редукторами винтов 17-18 и 20-21. Избыточная тяговооруженность СУ, обеспечивающая вертикальный взлет/посадку и висение, предопределяет как возможность легко реализовать выполнение технологии КВП и КВВП, так и создания пропульсивной тяги от несущего винта 15, отклоненного вперед по полету совместно с маршевой тягой меньших винтов 17-18 и 19-20 в кольцевых каналах 10 и повышения скорости горизонтального полета до 463 км/ч. При этом муфтами сцепления возможно в СУ отключение любого избыточного ТВаД. В случае отказа одного ТВаД, то возможен полет и посадка в полетной конфигурации крылатого автожира на режиме авторотации его несущего винта 15. В случае выхода из строя двух ТВаД или несущего винта 15, или рулевых винтов 17-18 и 19-20, то возможно, используя систему спасения на парашюте, расположенную в контейнере обтекателя 5 СТК 3 (на фиг. 1 не показаны), совершить аварийную посадку и повысить безопасность полета.
Управление многоцелевым СВДРС при различных режимах его полета обеспечивается общим (изменяющим силу тяги) шагом несущего винта 15 с жестким креплением его лопастей и с большой круткой соосных меньших винтов 17-18 и 19-20 как при поступательном горизонтальном скоростном его полете, так и вертикальном взлете/посадке или висении посредством многорежимной аэродинамической системы управления балансировкой (МАСУБ) по крену и тангажу, но и курсу соответственно как разрезным устройством 6 верхнего СТК 3 совместно с элевонами 12-13 и элевонами 12-13, но и разновеликой тягой меньших винтов 17-18 и 19-20.
В полетной конфигурации крылатого автожира или винтокрыла маршевая тяга обеспечивается меньшими винтами 17-18 и 19-20 в кольцевых каналах 10, а подъемная сила создается крыльями 3-9 и несущим винтом 15 соответственно авторотирующим или вращающимся на режиме близком к самовращению (см. фиг. 1б). На режиме вертикального взлета, посадки и висения подъемная сила создается только несущим винтом 15 (см. фиг. 1в), а на режиме перехода - крыльями 3-9 и несущим винтом 15.
При висении направление полета может осуществляться как у вертолета одновинтовой несущей схемы с рулевыми меньшими винтами 18-19 и 19-20 поворачиваясь влево-вправо, перемещаясь вверх-вниз, поступательный полет вперед-назад, влево-вправо и в любой комбинации (см. фиг. 1в). С приближением к поверхности земли или палубы корабля и при полете вблизи них на вертолетных режимах полета пятилопастной несущий 15 винт образуют под СВДРС область уплотненного воздуха, создающего эффект воздушной подушки и тем самым повышающего его КПД.
Полет СВДРС с коротким взлетом и посадкой при его максимальном взлетном весе может осуществляться как у винтокрыла. В этом случае его меньшие винты 17-18 и 19-20 в кольцевых каналах 10 обеспечивают маршевую тягу, а несущий винт 15 отклоненный вперед по полету, изменяя угол установки лопастей, вследствие чего формируется движущая сила, создающая для разбега маршевую тягу и подъемную силу равную подъемной силе, обеспечиваемой крыльями 3-9. При этом мощность, обеспечиваемая работающими ТВаД, выдающими 60% или 70% от взлетной мощности СУ, 55% мощности из которых перераспределяется на винт винты 17-18 и 19-20, а остальные из 60% или 70% мощности перераспределяются через главный и промежуточный редуктор на меньшие винты 17-18 и 19-20. Это позволяет увеличить соответственно взлетный его вес на 7 и 15%, а также и скорость крейсерского полета, так как при высоких скоростях полетная комбинация крылья 3-9 с тяговыми винтами 17-18 и 19-20 гораздо выгоднее для создания подъемной силы и маршевой тяги, чем одним несущим винтом 15. Образуемый при этом остаточный реактивный момент от несущего винта 15 парируется рулевыми меньшими винтами 17-18 и 19-20 (см. фиг. 1a). После набора высоты горизонтальный полет СВДРС при максимальной полезной нагрузке может осуществляться также как у крылатого автожира. В этом случае меньшие винты 17-18 и 19-20 обеспечивают маршевую тягу, а несущий винт 15 отключается от привода двигателей СУ и он начинает авторотировать, создавая только подъемную силу меньшую подъемной силы, обеспечиваемой крыльями 3-9. Кроме того, при авторотации срыв потока на лопастях несущего винта отодвигается на более высокие скорости полета, что позволит получить скорости полета до 480-500 км/ч.
Таким образом, многоцелевой СВДРС выполнен по технологии МАСУБ, обеспечивающей разновеликими винтами сверхманевренность и управление по тангажу, крену и курсу с компенсацией реактивного крутящего момента и схеме биплан, создающей распределенную разгрузку ненагруженного несущего винта без управления циклического изменения его шага и с жестким креплением его лопастей, но и с передней двухвинтовой ДРС, имеющей кольцевые каналы, снабженные на их выходе развитыми рулевыми поверхностями - элевонами и соосными меньшими винтами, позволяющими достичь скорости поступательного полета до 463 км/ч.
Очевидно, освоение СВДРС с такими улучшенными показателями для авиатранспорта в современных условиях - задача многоплановая и не является технически неразрешимой. Поэтому самой жизнью будет продиктована задача и их освоения, которая достаточно просто и технически реализуема на базе имеющихся вертолетов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2610326C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ, ДЕСАНТИРУЕМЫЙ С САМОЛЕТА-НОСИТЕЛЯ | 2016 |
|
RU2627975C2 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2667433C2 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2611480C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652863C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2655249C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2664024C2 |
| БЕСПИЛОТНЫЙ ВЫСОКОСКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2653953C1 |
| МНОГОЦЕЛЕВОЙ ВЫСОКОСКОРОСТНОЙ САМОЛЕТ-ВЕРТОЛЕТ | 2017 |
|
RU2673317C1 |
| МНОГОВИНТОВОЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2658736C1 |
Изобретение относится к области авиационной техники, в частности к конструкциям скоростных вертолетов. Скоростной вертолет с движительно-рулевой системой (СВДРС) содержит на пилоне несущий винт и под ним с ярусным расположением винты в кольцевых каналах, установленные на поворотных консолях крыла, имеет два двигателя, передающих крутящий момент на несущий винт, смонтированный отклоненным вперед по полету, и тянущие винты, создающие при висении подъемную силу и управление по крену, газовые струйные рули. СВДРС выполнен по технологии многорежимного аэродинамического управления, обеспечивающего рулевыми винтами балансировку по тангажу, крену и курсу с компенсацией реактивного крутящего момента, и схеме биплан. Несущий винт выполнен с жестким креплением лопастей. На опоре, установленной соосно внутри вала несущего винта, смонтировано стреловидное трапециевидное крыло (СТК), образующее с крылом обратной стреловидности (КОС) схему биплан с высокорасположенными крыльями Х-образной в плане конфигурации. Достигается повышение весовой отдачи и уменьшение потребной мощности на путевую балансировку при висении, улучшение поперечной и продольной управляемости. 1 з.п. ф-лы, 1 ил.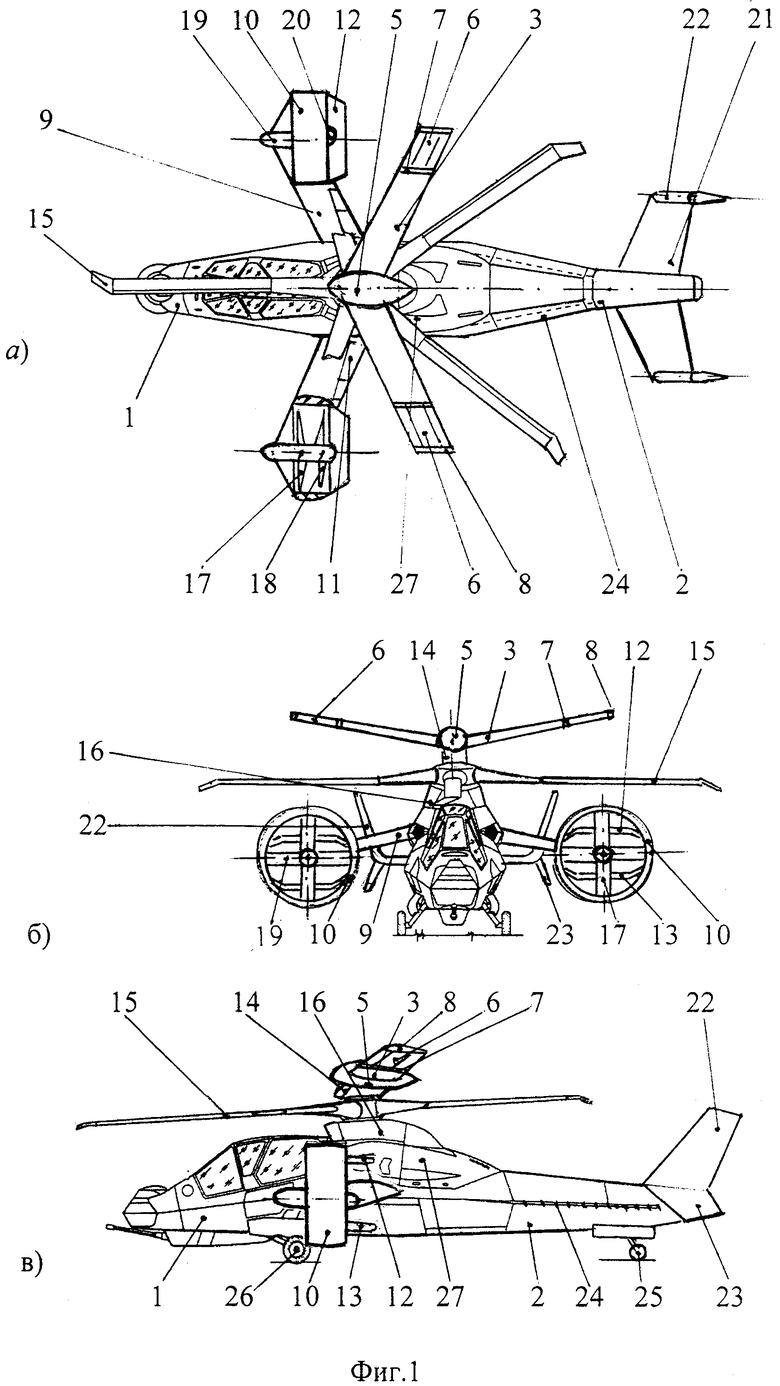
1. Скоростной вертолет с движительно-рулевой системой, содержащий на пилоне несущий винт и под ним с ярусным расположением тянущие винты в кольцевых каналах, установленных на поворотных консолях крыла, имеет силовую установку, включающую два двигателя, передающих крутящий момент через главный редуктор и соединительные валы на несущий винт, смонтированный отклоненным вперед по полету, и тянущие винты, создающие при висении подъемную силу и управление по крену, и трехопорное убирающееся колесное шасси, отличающийся тем, что он выполнен по технологии многорежимного аэродинамического управления и схеме биплан, несущий винт выполнен без управления циклического изменения шага с жестким креплением лопастей, смонтирован на опоре, установленной соосно внутри вала несущего винта, которая жестко закреплена своим нижним концом к корпусу внутренней нижней части главного редуктора несущего винта, а верхним сцентрирована относительно его вала при помощи подшипникового узла таким образом, что выступающая из вала верхняя часть полой опоры закреплена в каплевидном обтекателе стреловидного трапециевидного крыла (СТК), образующего с упомянутым крылом, выполненным в виде прямого крыла обратной стреловидности (КОС), как бы схему биплан с высокорасположенными крыльями большого удлинения и выносом концевых хорд нижнего КОС и верхнего СТК от их корневых хорд вперед и назад по полету соответственно со стреловидностью по передним их кромкам χ=-25° и χ=+25°, образующим с разнонаправленной стреловидностью Х-образную в плане конфигурацию, и концепции переднего размещения движительно-рулевой системы (ДРС) с винтами в упомянутых кольцевых каналах, элевоны нижнего КОС установлены на выходе снизу и сверху на величину половины радиуса меньшего винта от центра каждого кольцевого канала и имеют отогнутые концы к центру последнего, жестко смонтированного на стреловидной концевой части КОС, имеющей размах, равный наружному радиусу кольцевого канала, при этом нижнее КОС, имеющее отрицательный угол (ψ = -10°) поперечного V, снабжено по всему его размаху односекционными закрылками, имеющими корневую хорду в 19/11 раза больше концевой хорды и возможность их отклонения на углы 20°/40° и 75° соответственно при взлете/посадке с коротким разбегом/пробегом и вертикальном взлете, посадке или висении и образующими при максимальном их отклонении как бы нижнее КОС "обратного сужения", причем каждая консоль верхнего СТК, имеющего положительный угол (ψ = +10°) поперечного V и выпукло-вогнутый профиль, снабжена с соответствующим профилем концевой частью, выполненной в виде цельно-поворотного трехэлементного разрезного устройства с несущими поверхностями, смонтированными между его внутренней и концевой плоскими шайбами и снабженными возможностью их дифференциального отклонения в вертикальной плоскости, изменяя при этом углы их атаки, в свою очередь, образуют разновеликие подъемные силы на концах СТК и, как следствие, происходит только при висении поперечное совместное управление с соответствующим отклонением элевонов КОС, при этом каждое разрезное устройство выполнено в виде трех разновеликих по ширине крыльев, имеющих несимметричный плосковыпуклый профиль и смонтированных между внутренней и концевой шайбами в сборке с перекрытием каждой задней кромкой последующей передней таким образом, что, повторяя выпукло-вогнутый профиль второго крыла с двумя равновеликими щелевыми проходами, образуют среднюю аэродинамическую хорду (САХ), в их сборке равную 15/16 от суммы фактических САХ трех их крыльев, переднее и заднее из которых выполнены равновеликими по ширине и с меньшей их САХ, имеющей величину 3/4 от САХ среднего более широкого крыла, причем в несущей схеме с ДРС, имеющей в каждом кольцевом канале КОС флюгерно-реверсивные меньшие винты, вынесенные к передней и задней кромкам кольцевого канала, образующего с нижним КОС в точках их соприкосновения совместную удобообтекаемую конструкцию, и установленные тандемом с взаимно противоположным вращением тянущего и толкающего меньших соосных винтов, и перераспределяющей при вертикальном взлете/посадке и висении мощность двигателей силовой установки (СУ) соответственно главным и промежуточными редукторами на несущий винт и ДРС с соосными винтами, мощность СУ перераспределяется через поперечные V-образные как в плане, так и в поперечной плоскости выходные валы главного редуктора посредством консольных Т-образных в плане редукторов соосных винтов, и через главный редуктор на несущий винт, но и обратно, при этом система трансмиссии, включающая многопоточный двухуровневый главный редуктор, обеспечивающий передачу взлетной мощности, например, от турбовальных двигателей (ТВаД), расположенных в моторном отсеке фюзеляжа, к несущему винту и группе меньших соосных винтов в кольцевых каналах посредством соответственно вертикального выходного вала верхнего уровня главного редуктора и поперечными выходными валами нижнего уровня, имеющими выходные угловые редукторы, обеспечивающие соответствующие перегибы в поперечной плоскости с левым и правым соединительными валами, образующими с соответствующими Т-образными консольными редукторами соосных винтов как бы Н-образную с V-образной в плане перемычкой трансмиссию ДРС, причем входные валы среднего уровня главного редуктора, расположенные по направлению полета за центром масс и по обе стороны от оси симметрии, связаны с двумя ТВаД, размещенными сзади от соответствующих входных валов и выполненными для отбора взлетной их мощности с передним выводом вала, каждый из последних, образуя синхронизирующую систему, снабжен муфтой свободного хода, выдающей, отключая от топливной системы и трансмиссии в горизонтальном скоростном полете любой избыточный ТВаД и один любой в случае его отказа или оба ТВаД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в крылатый автожир или вертолет для горизонтального полета или аварийной посадки, при этом в последнем случае автоматическая установка лопастей несущего винта и соосных меньших винтов обеспечивается соответственно в авторотирующее и флюгерное положение с одновременным автоматическим ускоренным отклонением вниз как закрылков нижнего КОС, так и синфазным отклонением вниз его нижних и верхних элевонов, а для повышения безопасности каплевидный обтекатель верхнего СТК, имеющий в верхней автоматически раскрываемой части контейнер с вытяжным и основным парашютами, стропы последнего закреплены на верхней части полой опоры.
2. Скоростной вертолет с движительно-рулевой системой по п. 1, отличающийся тем, что с целью уменьшения аэродинамического сопротивления упомянутый пилон несущего винта, имеющий каплевидную форму в плане и при виде сбоку трапециевидную конфигурацию с обратной стреловидностью, при этом фюзеляж, имеющий основной силовой элемент в виде коробчатой балки, изготовленной из композиционных материалов, снабжен центральным основным топливным баком и с внешней стороны на балку закреплены все основные узлы и агрегаты, закрытые прикрепленными крупноразмерными панелями, формирующими внешний его контур в виде граненной формы фюзеляжа с наклонными поверхностями, имеющими радиопоглощающие покрытия, а втулки бесшарнирного несущего винта и выходная часть полого вала, проходящая до обтекателя СТК, снабжены соответственно удобообтекаемыми и стреловидными при виде сбоку обтекателями, причем с целью уменьшения инфракрасного излучения от работающих двигателей упомянутая система, отводящая горячие выхлопные их газы, размещена по внешним бортам хвостовой балки таким образом, что когда горячие газы смешиваются с забортным воздухом и выбрасываются охлажденными через ряд боковых щелей вдоль всей ее длины и, тем самым, уменьшая сопротивление хвостовой балки за счет эффекта отсоса пограничного слоя, улучшают ее обтекание и исключают резонансные ее колебания совместно с U-образным оперением, имеющим стреловидный стабилизатор с верхними килями большего удлинения, отклоненными по дуге наружу от плоскости симметрии и снабженными нижними килями удлинения, отклоненными с плавным их сопряжением от верхних килей наружу, образуя две боковые V-образные поперечные конфигурации.
| СКОРОСТНОЙ ТУРБОЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ | 2013 |
|
RU2521090C1 |
| СКОРОСТНОЙ ВИНТОКРЫЛ | 2013 |
|
RU2539679C1 |
| US 8915464 B2, 23.12.2014 | |||
| US 8403255 B2, 26.03.2013. | |||

