Изобретение относится к судостроению, а более конкретно к области проведения подводно-технических и поисково-спасательных работ, связанных с подъемом и перемещением подводных природных или затонувших искусственных объектов произвольной формы, включая заиленные. Под характеристикой «заиленные» понимаются объекты, частично или почти полностью погруженные в ил, так что видна лишь их верхняя часть.
Известно съемное захватное устройство, навешиваемое на судовые грузоподъемные устройства плавучих подъемных средств, входящее в «Комплекс для подъема и транспортировки затонувших подводных лодок и других объектов» [1]. Упомянутое захватное устройство выполнено на общей раме с несколькими поворотными приводными лапами, форма которых соответствует поднимаемому судну. Приводные лапы разнесены на раме по длине поднимаемого судна и приводимы в движение индивидуально или совместно с помощью гидроцилиндров. Последние соединяют поворотные лапы с рамой захватного устройства, охватывающего корпус затонувшего судна без его обжатия путем заглубления поворотных лап под его корпусом.
Недостатком известного захватного устройства является громоздкость захватных лап, связанная с необходимостью обеспечить требуемую прочность при наличии значительных изгибных моментов по всей длине лап, имеющих криволинейную форму. Громоздкость захватных лап затрудняет их внедрение в грунт и, в связи с этим, требуется использование достаточно мощных гидроцилиндров (отдельный гидроцилиндр на каждую захватную лапу).
Известно устройство захвата затонувшего объекта, описанное в патенте «Способ выполнения подводных подъемно-транспортных операций и устройства для его осуществления» [2]. Указанное устройство захвата, взятое за прототип, содержит горизонтальную секцию и пристыкованные к ней вертикальные секции, на нижних частях которых предусмотрены подвижные опорные консоли. Последние установлены в направляющих попарно с двух сторон с возможностью выдвижения внутрь подъемно-транспортного устройства в плоскостях, расположенных под углом 50-80° к диаметральной плоскости подъемно-транспортного устройства (ПТУ) с возможностью образования опорной призмы для поднимаемого объекта при выдвинутом положении этих консолей. При этом на вводимых под поднимаемый объект кромках опорных консолей выполнены форсунки для подачи воды под давлением для размыва грунта.
Недостатком известного захватного устройства является громоздкость вертикальных секций и опорных консолей в сочетании с направляющими и гидроцилиндрами. Кроме того, известное захватное устройство не предназначено для подъема сильно заиленных малогабаритных объектов любой формы и не может быть эффективно использовано в таких условиях.
Из приведенного патента [2] известен также способ захвата затонувших объектов, заключающийся в том, что ПТУ позиционируют над поднимаемым объектом, опускают на последний и центрируют относительно поднимаемого объекта. Центрирование ПТУ проводят путем его перемещения установленными на вертикальных секциях привальными рычагами устройства центрирования после выдвижения их гидроцилиндрами навстречу друг другу до установления динамического контакта с поднимаемым объектом. Затем ПТУ опускают до контакта его горизонтальной секции с поднимаемым объектом и захватывают последний путем одновременного попарного выдвижения навстречу друг другу до контакта с нижней частью этого объекта опорных консолей устройства захвата. После этого осуществляют подъем объекта.
Недостатком известного способа является невозможность захвата сильно заиленных объектов в связи с трудностями внедрения в ил массивных вертикальных секций. При этом принципиально возможный размыв грунта на всем протяжении подъемно-транспортного устройства не может быть обеспечен предусмотренными форсунками на кромках опорных консолей.
Известен способ захвата затонувших объектов при выполнении подводных подъемно-транспортных операций по патенту «Способ выполнения подводных подъемно-транспортных операций и устройство для его осуществления» [3]. Указанный способ, взятый за прототип, включает подводное позиционирование над поднимаемым объектом ПТУ, имеющего положительную плавучесть и замкнутого в плане по наружному периметру. Подъемно-транспортное устройство опускают на поднимаемый объект, размещая его внутри замкнутого контура с дополнительным центрированием ПТУ относительно объекта за счет отрицательной плавучести. Фиксируют на дне и захватывают поднимаемый объект путем одновременного попарного выдвижения навстречу друг другу до контакта с нижней его частью опорных консолей устройства захвата, расположенных в нижней части ПТУ. Выполняют балластировку и поднимают ПТУ с объектом на поверхность. При этом выдвижение консолей устройства захвата, отрыв от грунта и начальный подъем устройства с захваченным объектом сопровождают местным размывом грунта под поднимаемым объектом с одновременным отсосом возникающей пульпы и подачей ее на устройство отделения от воды и сбора твердой фракции пульпы.
Недостатком известного способа является невозможность захвата сильно заиленных объектов в связи с невозможностью внедрения в ил расположенных по бокам понтонов. При этом принципиально возможный размыв грунта на всем протяжении подъемно-транспортного устройства не может быть обеспечен предусмотренными форсунками на кромках опорных консолей.
Ставилась задача обеспечения возможности подъема заиленных подводных объектов любой конфигурации путем разработки захватного устройства и конкретизации способа его использования при осуществлении подъемных работ.
Поставленная задача решается тем, что в известном устройстве, включающем захватное устройство для подъема подводных объектов, содержащее горизонтальную секцию и установленные по ее краям вертикальные секции, на нижних частях которых предусмотрены подвижные опорные консоли с возможностью образования опорной призмы для поднимаемого объекта при подведении под него этих консолей, вертикальные секции выполнены в виде стержней, которые расположены в плане по кругу, причем расстояние между ними выбрано меньшим по сравнению с наименьшим габаритным размером поднимаемого объекта, при этом каждая опорная консоль соединена с соответствующим вертикальным стержнем шарниром, имеющим выступ, предотвращающий поворот консоли во внешнем направлении и с возможностью ее поворота до прямого угла в строну поднимаемого объекта, при этом в шарнирах перпендикулярно их оси выполнены углубления и в них установлены фиксирующие штыри, так чтобы вертикальные стержни и опорные консоли были однонаправленны, причем на каждой опорной консоли со стороны поднимаемого объекта предусмотрена проушина, к которой прикреплен конец предусмотренного внутреннего грузового троса, пропущенный через предусмотренное поперечное отверстие в вертикальном стержне, так что верхняя часть каждого внутреннего грузового троса оказывается отделенной от поднимаемого объекта перегородкой, а вышеупомянутого поперечного отверстия к внутреннему грузовому тросу прикреплена тяга, связанная с фиксирующим штырем в соответствующем шарнире, выше места крепления упомянутой тяги каждый внутренний грузовой трос пропущен через соответствующее отверстие в горизонтальной секции и его верхний конец скреплен с выступающим штоком силового гидроцилиндра, на котором предусмотрен грузовой рым, скрепленный с корпусом силового гидроцилиндра посредством петли из троса, продетого через предусмотренные совмещенные сквозные отверстия в штоке и корпусе силового гидроцилиндра, при этом на горизонтальной секции установлены не менее трех балластных емкостей, которые снабжены впускными вентилями в их верхней части, и в известном способе захвата подводных объектов для осуществления их подъема, характеризующемся тем, что имеющее связь с обеспечивающим судном через кабель-трос захватное устройство с небольшой отрицательной плавучестью позиционируют над поднимаемым объектом, опускают на подводный объект и путем подведения под него опорных консолей осуществляют захват, а перед подъемом осуществляют балластировку, предлагаемое захватное устройство опускают на подводный объект путем заглубления вертикальных стержней с однонаправленными опорными консолями в ил, при этом для поддержания движения, близкого к прямолинейному, по мере появления перекосов открывают впускные вентили в балластных емкостях, находящихся на высшей части горизонтальной секции и закрывают впускные вентили в балластных емкостях на ее низшей части, а после заглубления захватного устройства на глубину, большую высоты поднимаемого объекта, при помощи силового гидроцилиндра выбирают внутренние грузовые тросы до достижения охвата опорными консолями нижней части поднимаемого объекта.
Выполнение вертикальных секций в виде стержней и расположение их в плане по кругу в сочетании с тем, что расстояние между ними выбрано меньшим по сравнению с минимальным габаритным размером поднимаемого объекта облегчает заглубление устройства и позволяет захватывать объекты любой формы.
Наличие шарнирной связи между вертикальными трубчатыми стержнями и соответствующими опорными консолями, на верхней части которых предусмотрен взаимодействующий со стенкой трубчатого стержня выступ, а с другой стороны стенки трубчатого стержня в опорной консоли предусмотрено углубление с фиксирующим штырем, которые обеспечивают однонаправленность вертикальных стержней и опорных консолей, облегчают заглубление устройства и позволяют подвести опорные консоли ниже поднимаемого объекта.
Установление на каждой опорной консоли со стороны поднимаемого объекта проушины, к которой прикреплен конец предусмотренного внутреннего грузового троса, пропущенный через предусмотренное поперечное отверстие в вертикальном стержне, так что верхняя часть каждого внутреннего грузового троса оказывается отделенной от поднимаемого объекта перегородкой, позволяет путем натяжения упомянутого троса поворачивать консоли в сторону поднимаемого объекта, обеспечивая тем самым его захват.
Прикрепление к внутреннему грузовому тросу вышеупомянутого поперечного отверстия тяги, которая связана с фиксирующим штырем в соответствующем шарнире, позволяет при натяжении указанного троса придать шарниру работоспособность по прямому назначению подведения консоли под объект.
Прокладка каждого внутреннего грузового троса через соответствующее отверстие в горизонтальной секции и скрепление его верхнего конца с выступающим штоком силового гидроцилиндра позволяет создавать натяжение всех указанных тросов с использованием единственного силового гидроцилиндра.
Скрепление грузового рыма с корпусом силового гидроцилиндра посредством петли из троса, продетого через предусмотренные совмещенные сквозные отверстия в штоке и корпусе силового гидроцилиндра с возможностью перерезания упомянутой петли из троса при выдвижении штока, позволяет сохранять выслабление внутренних грузовых тросов в процессе заглубления захватного устройства и обеспечивать необходимое натяжение тросов для захвата и последующего подъема объекта.
Установление на горизонтальной секции не менее трех балластных емкостей, которые снабжены впускными вентилями в их верхней части, позволяет в процессе заглубления захватного устройства производить его выравнивание путем создания дополнительного усилия на «отстающей» стороне заглубления за счет впуска забортной воды.
В частном случае соединения вертикальных стержней по периметру упрочняющими пластинами позволяет увеличить жесткость захватного устройства, а их заострение в нижней части уменьшает сопротивление при заглублении.
В частном случае выполнения балластных емкостей в виде секций в пустотелом кольцевом цилиндре, образованных за счет радиальных герметичных перегородок, обеспечивает компактность устройства.
В частном случае установление балластных емкостей с суммарной подъемной силой, меньшей веса захватного устройства, облегчает позиционирование и начальное заглубление захватного устройства.
Операции, характеризующиеся тем, что захватное устройство опускают на подводный объект путем заглубления вертикальных стержней с однонаправленными опорными консолями в ил, при этом для поддержания движения, близкого к прямолинейному, по мере появления перекосов открывают впускные вентили в балластных емкостях, находящихся на высшей части горизонтальной секции и закрывают впускные вентили в балластных емкостях на ее низшей части, позволяют обеспечить равномерное погружение в ил всех вертикальных стержней с опорными консолями.
Операции, характеризующиеся тем, что после заглубления захватного устройства на глубину, большую высоты поднимаемого объекта, при помощи силового гидроцилиндра выбирают внутренние грузовые стропы до достижения охвата опорными консолями нижней части поднимаемого объекта, обеспечивают захват поднимаемого объекта.
В частном случае, когда в процессе заглубления захватного устройства используют площадочный вибратор, который предварительно устанавливают на центральной части горизонтальной секции, обеспечивается ускоренное погружение в ил.
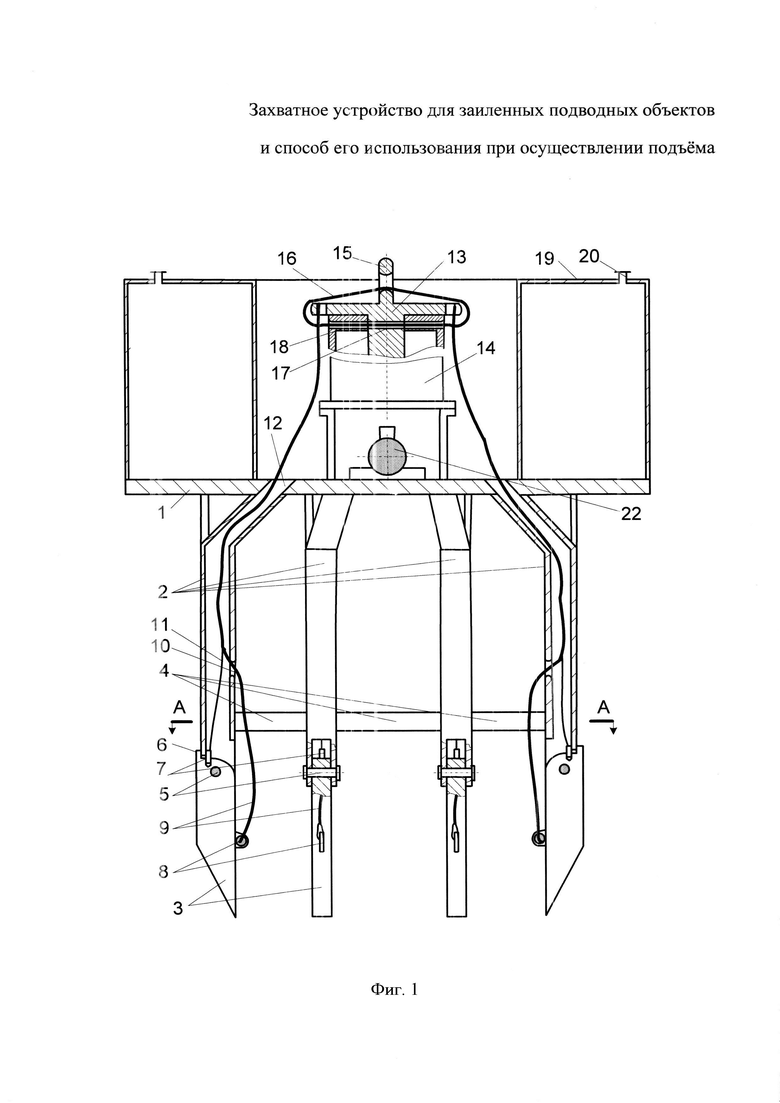
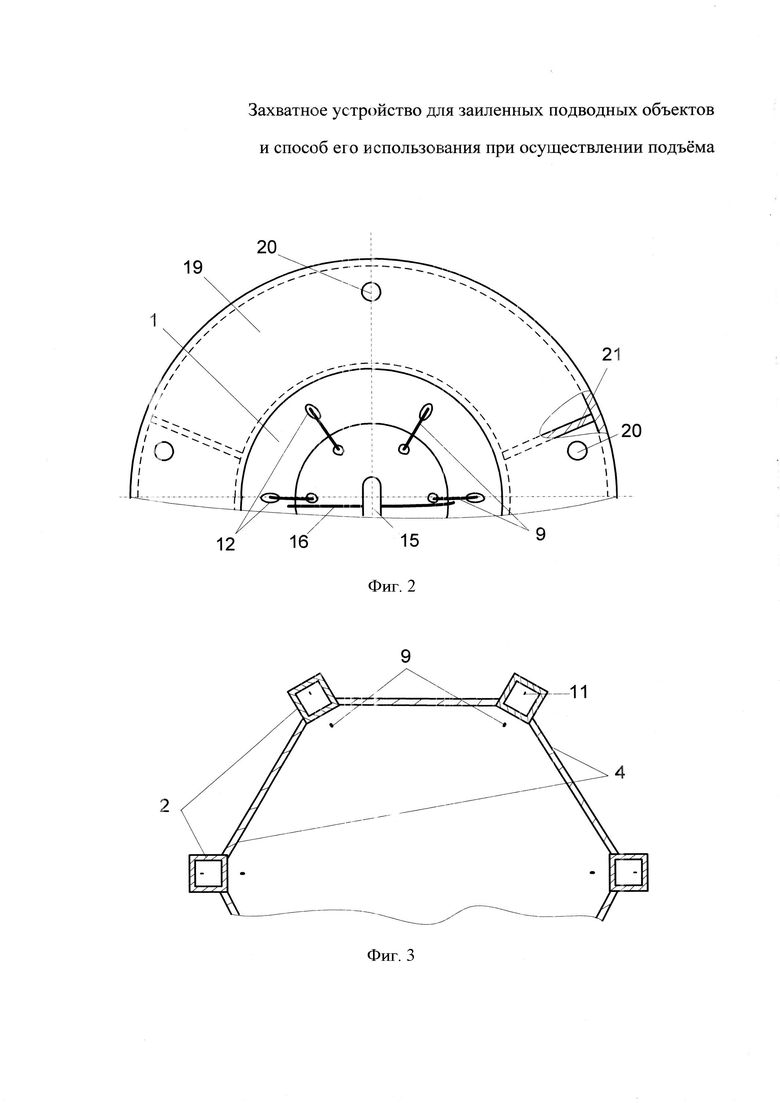
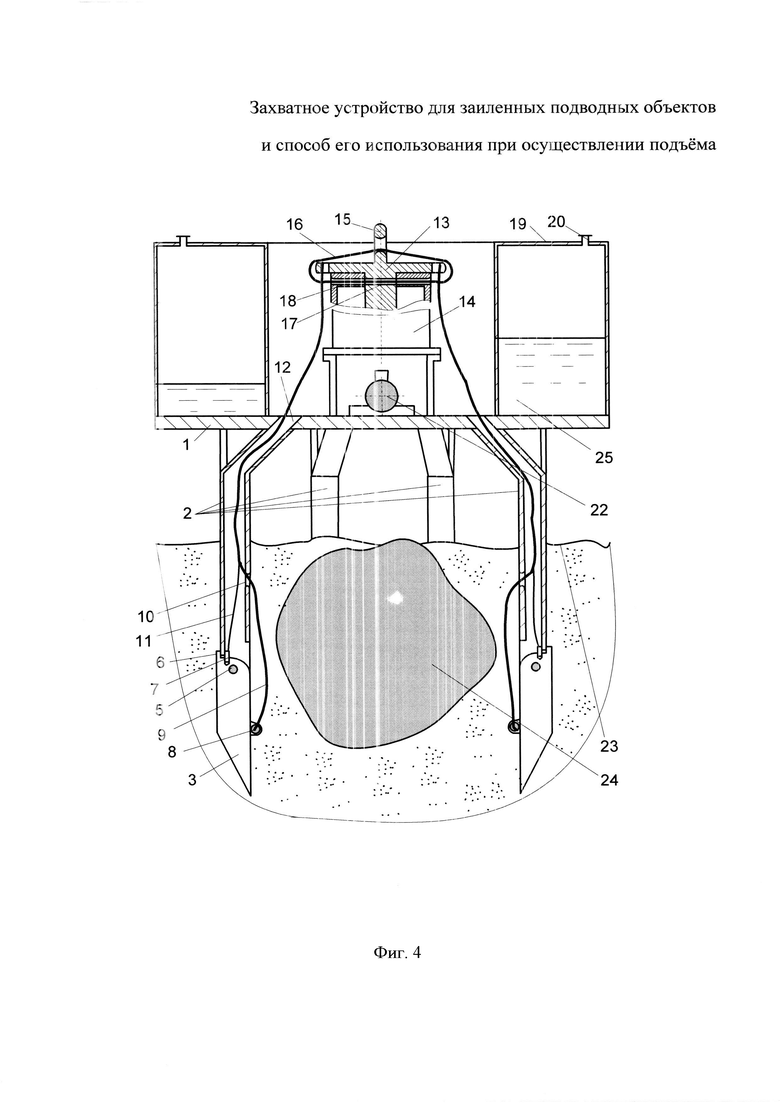
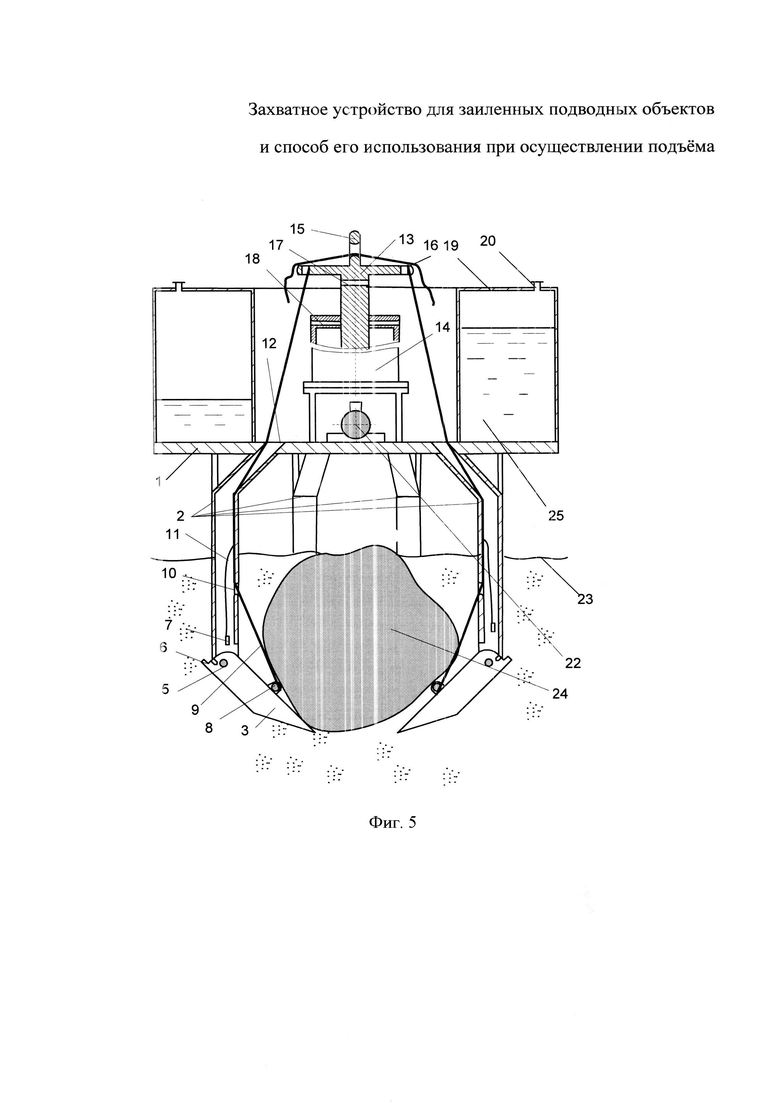
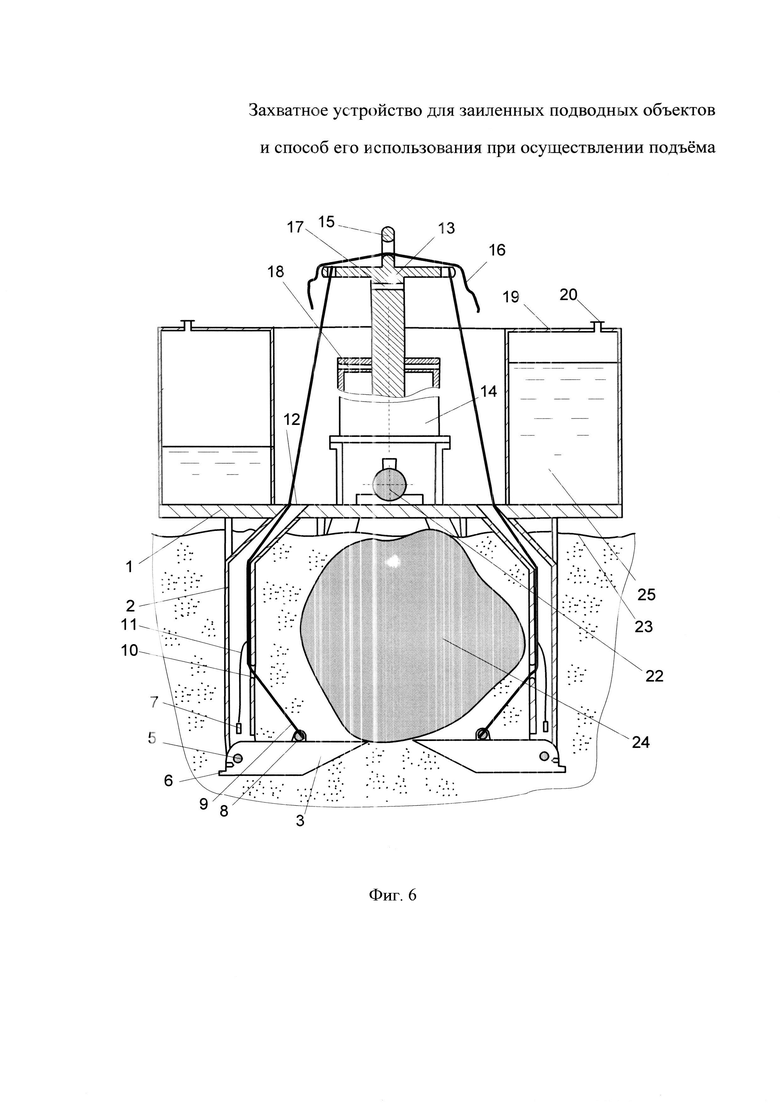
Сущность изобретения поясняется чертежами, где на фиг. 1 приведен общий вид захватного устройства; на фиг. 2 изображена часть вида сверху захватного устройства; на фиг. 3 изображена часть сечения А-А на фиг. 1; на фиг. 4 показано положение захватного устройства перед началом выбирания внутренних грузовых тросов; на фиг. 5 приведен общий вид захватного устройства в положении частичного захвата поднимаемого объекта; на фиг. 6 представлен общий вид захватного устройства в положении полного захвата поднимаемого объекта.
Захватное устройство для подъема заиленных подводных объектов согласно изобретению содержит горизонтальную секцию 1 (фиг. 1, 2) и установленные по ее краям в плане по кругу вертикальные трубчатые стержни 2 (фиг. 3), на нижних частях которых предусмотрены подвижные опорные консоли 3. Расстояние между вертикальными стержнями 2 выбрано меньшим по сравнению с наименьшим габаритным размером поднимаемого объекта, и они соединены заостренными в нижней части упрочняющими пластинами 4 (фиг. 1, 3).
Каждый вертикальный стержень 2 имеет шарнирную связь 5 (указана ось шарнира) с соответствующей опорной консолью 3, на верхней части которой предусмотрен выступ 6, предотвращающий поворот консоли 3 во внешнем направлении и с возможностью ее поворота до прямого угла в строну поднимаемого объекта (в центральной части фиг. 1 две шарнирные связи с консолями для упрощения изображены повернутыми на 30°). Кроме того, на верхней части каждой опорной консоли 3 выполнено углубление и в него установлен фиксирующий штырь 7, так чтобы вертикальные стержни и опорные консоли были однонаправленны. При этом на каждой опорной консоли 3 со стороны поднимаемого объекта предусмотрена проушина 8, к которой прикреплен конец внутреннего грузового троса 9.
Внутренний грузовой трос 9 пропущен через предусмотренное поперечное отверстие 10 в стенке трубчатого вертикального стержня 2, так что он оказывается отделенным от поднимаемого объекта перегородкой (стенкой трубчатого вертикального стержня 2). Выше поперечного отверстия 10 к тросу прикреплена тяга 11, связанная с фиксирующим штырем 7 в опорной консоли 3. Выше поперечного отверстия 10 внутренний грузовой трос 9 пропущен через предусмотренные отверстия 12 в горизонтальной секции 1 и его верхний конец скреплен с выступающим штоком 13 силового гидроцилиндра 14.
На выступающем штоке 13 установлен грузовой рым 15, скрепленный с корпусом силового гидроцилиндра посредством петли из троса 16, который продет через предусмотренные совмещенные сквозные отверстия 17 в штоке и 18 в корпусе силового гидроцилиндра. При этом на горизонтальной секции 1 установлены не менее трех балластных емкостей 19, в верхней части которых предусмотрены управляемые впускные вентили 20. Балластные емкости могут быть выполнены в виде секций в пустотелом кольцевом цилиндре, образованных за счет радиальных герметичных перегородок 21 (фиг. 2). На центральной части горизонтальной секции 1 может быть установлен площадочный вибратор 22.
Захватное устройство связано с обеспечивающим судном на поверхности через кабель-трос (не показаны) и грузовой рым 15. С помощью указанного кабель-троса осуществляется электропитание насоса (не показан) силового гидроцилиндра 14 и управляемых впускных вентилей 20, а также проводится последующий подъем подводного объекта.
Способ использования предлагаемого захватного устройства заключается в следующем. Имеющее связь с обеспечивающим судном через кабель-трос захватное устройство при помощи петли из троса 16 и грузового рыма 15 подвешивают на грузовом гаке (не показан) за счет гидроцилиндра 14 (фиг. 1). Далее устройство позиционируют над поднимаемым объектом и затем опускают на поверхность грунта 23 (фиг. 4), охватывая в плане подводный объект 24 (в качестве примера, на фиг. 4 изображен наименее удобный для захвата природный подводный объект 24 типа крупного валунного камня окатанной формы). Начальное заглубление вертикальных стержней с однонаправленными опорными консолями в ил происходит за счет предусмотренной небольшой отрицательной плавучести захватного устройства.
Для продолжения заглубления включают площадочный вибратор 22 и увеличивают отрицательную плавучесть захватного устройства путем впуска забортной воды в балластные отсеки 19. При этом для поддержания движения, близкого к прямолинейному, по мере появления перекосов открывают впускные вентили в балластных емкостях, находящихся на высшей части горизонтальной секции 1 и закрывают впускные вентили в балластных емкостях на ее низшей части. В результате происходит перераспределение заглубляющей силы, т.е. происходит ее увеличение на стороне «отстающего» стержня. На фиг. 4-6 условно изображены разные уровни воды 25 в предположении, что заглубление происходило в условиях устранения перекосов (правая часть захватного устройства испытывала повышенное сопротивление).
После заглубления захватного устройства на глубину, большую высоты поднимаемого объекта (фиг. 4), при помощи силового гидроцилиндра 14 начинают выбирать внутренние грузовые тросы 9. При их натяжении тяга 11 также движется вверх, вытягивая фиксирующий штырь 7 и освобождая, тем самым, шарнирную связь 5. В результате этого опорные консоли 3 приобретают возможность поворачиваться в сторону поднимаемого объекта 24.
В процессе начального натяжения внутренних грузовых тросов вследствие движения выступающего штока 13 происходит срезание петли троса 16. В результате захватное устройство оказывается подвешенным при помощи внутренних грузовых тросов 9 и при их дальнейшем натяжении происходит частичный захват поднимаемого объекта 24 (фиг. 5). В этих условиях дальнейшее заглубление происходит при действии дополнительной силы, обусловленной при включенном силовом гидроцилиндре 14 «самоподтягиванием» захватного устройства за счет зацепления за поднимаемый объект 24.
Работу силового гидроцилиндра 14 и площадочного вибратора 22 продолжают до достижения полного охвата опорными консолями 3 нижней части поднимаемого объекта 24 (фиг. 6).
Обслуживание предлагаемого захватного устройства может осуществляться водолазом, а при использовании на больших глубинах возможно применение необитаемого подводного аппарата.
Предлагаемое изобретение позволит повысить эффективность подводно-технических работ при подготовке подъема или перемещения сильно заиленных подводных объектов любой конфигурации. Устройство и способ его использования может быть реализован при подъеме различных подводных объектов: обломков разбившегося самолета или вертолета, аварийных подводных аппаратов, затонувших учебных торпед и мин, подводных памятников древности, а также для перемещения крупных валунных камней при очистке морского дна.
Источники информации
1. Пат. 2390460 РФ, МПК В63С 7/02, В63С 23/52. Комплекс для подъема и транспортирования затонувших подводных лодок и других судов / В.А. Киселёв, В.А. Сидоров, В.Г. Фомин и др., Заявл. 24.03.2009; Опубл. 27.05.2010, Бюл. №15.
2. Пат. 2238876 РФ, МПК В63С 7/06. Способ выполнения подводных подъемно-транспортных операций и устройства для его осуществления / О.И. Ефимов, Заявл. 11.03.2001; Опубл. 27.10.2004.
3. Пат. 2388648 РФ, МПК В63С 7/02, В63С 7/10. Способ выполнения подводных подъемно-транспортных операций и устройство для его осуществления / О.И. Ефимов, А.В. Красильников, Р.В. Красильников, Заявл. 11.01.2009; Опубл. 10.05.2010, Бюл. №13.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАХВАТА И ПОДЪЁМА ЗАИЛЕННЫХ ПОДВОДНЫХ ОБЪЕКТОВ | 2019 |
|
RU2709057C1 |
| Судоподъемный комплекс, твердотопливный газогенератор и способ судоподъема | 2018 |
|
RU2700431C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ПОДВОДНЫХ ПОДЪЕМНО-ТРАНСПОРТНЫХ ОПЕРАЦИЙ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2238876C2 |
| СПОСОБ ВЫПОЛНЕНИЯ ПОДВОДНЫХ ПОДЪЕМНО-ТРАНСПОРТНЫХ ОПЕРАЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2388648C1 |
| Способ выполнения подводных подъемно-транспортных операций и устройство для его осуществления | 2015 |
|
RU2619882C2 |
| СИСТЕМА ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ СУДОВ | 2011 |
|
RU2518683C2 |
| КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2009 |
|
RU2390460C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2016 |
|
RU2613181C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2510352C2 |
| Судно для подъема затонувших объектов | 1981 |
|
SU1063705A1 |
Изобретение относится к области судостроения и касается проведения подводно-технических и поисково-спасательных работ. Предложены захватное устройство для подъема заиленных подводных объектов и способ его использования. Захватное устройство содержит горизонтальную и вертикальные секции, на нижних частях которых предусмотрены подвижные опорные консоли с возможностью образования опорной призмы для поднимаемого объекта при подведении под него этих консолей. Вертикальные секции выполнены в виде трубчатых стержней, которые расположены в плане по кругу и имеют шарнирную связь с соответствующими опорными консолями, каждая из которых имеет выступ, предотвращающий поворот консоли во внешнем направлении. Захватное устройство опускают на подводный объект путем заглубления вертикальных стержней с однонаправленными опорными консолями в ил. Для поддержания движения, близкого к прямолинейному, используют балластные емкости, установленные на периферии горизонтальной секции. После заглубления захватного устройства на необходимую глубину при помощи силового гидроцилиндра выбирают внутренние грузовые стропы до достижения охвата опорными консолями нижней части поднимаемого объекта. Технический результат заключается в улучшении эксплуатационных характеристик захватного устройства для подъема заиленных подводных объектов, повышении эффективности подводно-технических работ. 2 н. и 4 з.п. ф-лы, 6 ил.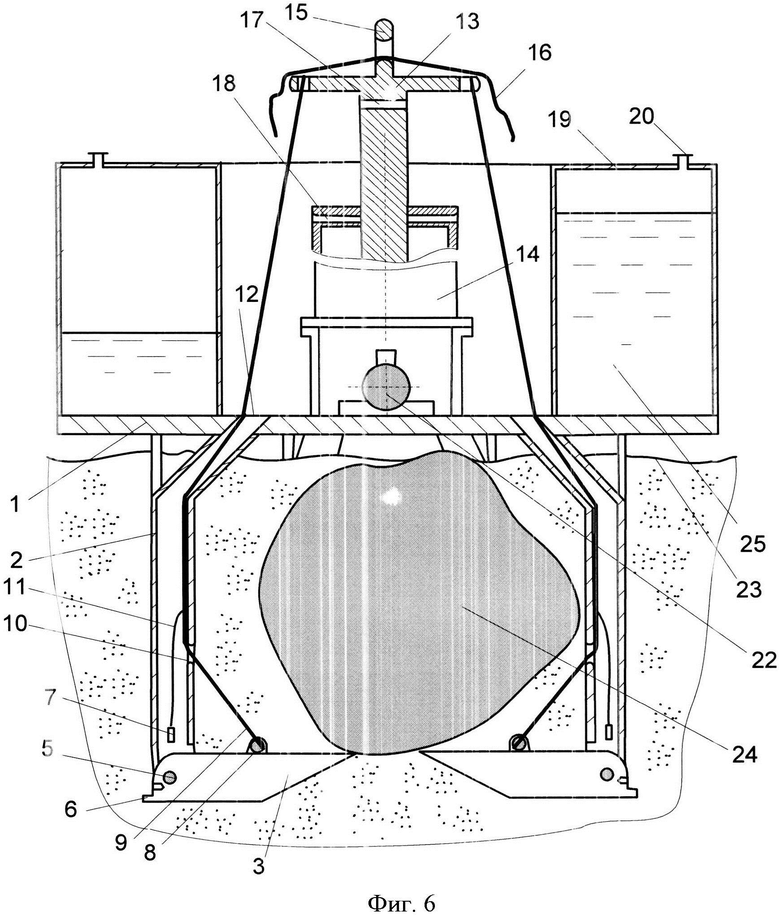
1. Захватное устройство для подъема заиленных подводных объектов, содержащее горизонтальную и вертикальные секции, на нижних частях которых предусмотрены подвижные опорные консоли с возможностью образования опорной призмы для поднимаемого объекта при подведении под него этих консолей, отличающееся тем, что вертикальные секции выполнены в виде трубчатых стержней, которые расположены в плане по кругу, причем расстояние между ними выбрано меньшим по сравнению с наименьшим габаритным размером поднимаемого объекта, при этом каждый вертикальный стержень и соответствующая опорная консоль имеют шарнирную связь, причем на верхней части каждой опорной консоли предусмотрен взаимодействующий со стенкой трубчатого стержня выступ, предотвращающий поворот консоли во внешнем направлении, а также с другой стороны стенки трубчатого стержня в опорной консоли предусмотрено углубление и в нем установлен фиксирующий штырь так, чтобы вертикальные стержни и опорные консоли были однонаправлены, причем на каждой опорной консоли со стороны поднимаемого объекта предусмотрена проушина, к которой прикреплен конец внутреннего грузового троса, пропущенный через предусмотренное поперечное отверстие в стенке вертикального трубчатого стержня, так что каждая верхняя часть внутреннего грузового троса оказывается отделенной от поднимаемого объекта перегородкой, а вышеупомянутого поперечного отверстия к внутреннему грузовому тросу прикреплена тяга, связанная с фиксирующим штырем в соответствующей опорной консоли, выше места крепления упомянутой тяги каждый внутренний грузовой трос пропущен через соответствующее отверстие в горизонтальной секции и его верхний конец скреплен с выступающим штоком силового гидроцилиндра, на котором предусмотрен грузовой рым, скрепленный с корпусом силового гидроцилиндра посредством петли из троса, продетого через предусмотренные совмещенные сквозные отверстия в штоке и корпусе силового гидроцилиндра с возможностью перерезания упомянутой петли из троса при выдвижении штока, при этом на периферии горизонтальной секции установлены не менее трех балластных емкостей, на верхних частях которых установлены впускные вентили.
2. Захватное устройство по п. 1, отличающееся тем, что вертикальные стержни по периметру соединены заостренными в нижней части упрочняющими пластинами.
3. Захватное устройство по п. 1, отличающееся тем, что балластные емкости выполнены в виде секций в пустотелом кольцевом цилиндре, образованных за счет радиальных герметичных перегородок.
4. Захватное устройство по п. 1, отличающееся тем, что суммарная подъемная сила балластных емкостей меньше веса захватного устройства.
5. Способ использования охарактеризованного в п. 1 захватного устройства для заиленных подводных объектов, заключающийся в том, что имеющее связь с обеспечивающим судном через кабель-трос захватное устройство с небольшой отрицательной плавучестью позиционируют над поднимаемым объектом, опускают на подводный объект и путем подведения под него опорных консолей осуществляют захват для последующего подъема, отличающийся тем, что захватное устройство опускают на подводный объект путем заглубления вертикальных стержней с однонаправленными опорными консолями в ил, при этом для поддержания движения, близкого к прямолинейному, по мере появления перекосов открывают впускные вентили в балластных емкостях, находящихся на высшей части горизонтальной секции, и закрывают впускные вентили в балластных емкостях на ее низшей части, а после заглубления захватного устройства на глубину, большую высоты поднимаемого объекта, при помощи силового гидроцилиндра выбирают внутренние грузовые стропы до достижения охвата опорными консолями нижней части поднимаемого объекта.
6. Способ использования захватного устройства по п. 5, отличающийся тем, что в процессе заглубления захватного устройства используют площадочный вибратор, который предварительно устанавливают на центральной части горизонтальной секции.
| СПОСОБ ВЫПОЛНЕНИЯ ПОДВОДНЫХ ПОДЪЕМНО-ТРАНСПОРТНЫХ ОПЕРАЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2388648C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 1995 |
|
RU2111890C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ПОДВОДНЫХ ПОДЪЕМНО-ТРАНСПОРТНЫХ ОПЕРАЦИЙ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2238876C2 |
| ПАРОВОЗНЫЙ КОТЕЛ | 1927 |
|
SU10022A1 |
| Грузозахватное устройство | 1989 |
|
SU1684233A1 |
| DE 20308850 U1, 28.08.2003 | |||
| WO 2004065206 A1, 05.08.2004. | |||

