Изобретение относится к области вооружения, в частности к артиллерийским управляемым снарядам с лазерной головкой самонаведения.
Известна система наведения управляемого снаряда [1], содержащая гироскоп инерциальный (ГИ), рулевой привод (РП) и головку самонаведения (ГСН), выход "Захват" которой соединен с первым входом первого элемента И и через элемент НЕ с первым входом второго элемента И, вторые входы которых соединены соответственно со вторым и третьим выходами гироскопа инерциального, выход первого элемента И соединен со входом "Компенсация" ГСН и с третьим входом первого элемента ИЛИ, второй вход которого соединен с первым выходом гироскопа инерциального, а выход - со входом первого усилителя мощности, выход второго элемента И соединен со вторым входом второго элемента ИЛИ, выход второго элемента ИЛИ соединен со входом второго усилителя мощности, выходы головки самонаведения "-Y" и "+Y" соединены с первыми входами первого и второго элементов ИЛИ соответственно, выходы головки самонаведения "+Z" и "-Z" соединены со входами третьего и четвертого усилителей мощности соответственно, выходы усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, вторые входы которых соединены со входом гироскопа инерциального и источником питания бортовой аппаратуры.
Существенным недостатком данной системы является недостаточная точность наведения при использовании в качестве рулевого привода воздушно-динамического привода.
Известна также система наведения управляемого снаряда [2], содержащая рулевой привод, гироскоп инерциальный с датчиком и головку самонаведения, выход "Захват" которой соединен с первым входом первого элемента И и через инвертор с первым входом второго элемента И, вторые входы которых соединены соответственно со вторым и третьим выходами гироскопа инерциального, выход первого элемента И соединен со входом "Компенсация" головки самонаведения и с третьим входом первого элемента ИЛИ, второй вход которого соединен с первым выходом гироскопа инерциального, а выход - со входом первого усилителя мощности, выход второго элемента И соединен со вторым входом второго элемента ИЛИ, выход второго элемента ИЛИ соединен со входом второго усилителя мощности, выходы первого, второго, третьего и четвертого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, вторые входы которых соединены с четвертым входом гироскопа инерциального и источником питания бортовой аппаратуры, выходы "-Y", "+Y", "+Z" и "-Z" соединены с входами первого, второго, третьего и четвертого расширителей импульсов, а выходы первого и второго расширителей импульсов соединены с первыми входами первого и второго элементов ИЛИ соответственно, выходы третьего и четвертого расширителей импульсов соединены со входами третьего и четвертого усилителей мощности соответственно.
Указанная система обладает недостаточной точностью, обусловленной тем, что при наборе снарядом угла пеленга, близкого к максимальному углу прокачки гироскопа, а также при больших амплитудах колебаний снаряда, возможно соударение наружной рамки корданового подвеса, на котором закреплен токоподвод ламельного датчика с корпусом гироскопа, вследствие чего изменяется его положение по отношению к запомненному в момент разарретирования.
При этом сигнал компенсации силы тяжести, формируемый ламельным датчиком, будет создавать вектор управляющей перегрузки не в вертикальной плоскости, а в произвольной в соответствии с занятым им положением после соударения.
Известен также гироскопический прибор (3), содержащий корпус, ротор в подвесе, фотооптический датчик угла, состоящий из оптопары - светодиода и фотодиода, установленный на корпусе и взаимодействующий с зеркалом, размещенным на роторе соосно с осью его собственного вращения, при этом в нем зеркало выполнено в форме сферического сегмента и установлено основанием сферического сегмента на торцевой поверхности ротора с размещением центра сферы в точке подвеса ротора, а на сферической поверхности зеркала выполнена контрастная маска, которая размещена симметрично плоскости, проходящей через ось собственного вращения ротора, между двумя линиями, проведенными через концы дуг, параметры которых выбраны из условия λ = (ϕ-ϕo)(λmax-λmin)(ϕmax-ϕmin), где λ - центральный угол дуги маски в плоскости, перпендикулярной оси собственного вращения ротора; ϕ и ϕo - угловое положение дуги маски и точки пересечения линий на сфере, измеряемое относительно плоскости большого круга, параллельной основанию сферического сегмента в плоскости, проходящей через ось собственного вращения ротора; λmax, λmin, ϕmax, ϕmin - максимальные и минимальные значения величин, λ и ϕ - определяющие границы маски.
Недостатком данного гироскопического прибора является небольшая рабочая зона действия и отсутствие информации о предельно допустимых углах прокачки, превышение которых приводит к соударению наружной рамки карданового подвеса с размещенным на нем зеркалом с корпусом гироскопа, и как следствие, к искажению информации об измеренных углах.
Задачей предлагаемого изобретения является повышение точности системы наведения за счет исключения команд управления с гироскопа инерциального при наборе снарядом угла пеленга, близкого к предельному углу прокачки гироскопа.
Для решения поставленной задачи в систему наведения управляемого снаряда, содержащую рулевой привод, гироскоп инерциальный с датчиком и головку самонаведения, вход "Компенсация" которой соединен с выходом элемента И, второй вход которого соединен с выходом "Захват" головки самонаведения, элемент ИЛИ, первый вход которого соединен с выходом первого расширителя импульсов, второй его вход соединен с выходом элемента И, а выход - со входом первого усилителя мощности, выходы головки самонаведения "-У", "+У", "+Z" и "-Z" соединены со входами первого, второго, третьего и четвертого расширителей импульсов, а выходы третьего и четвертого расширителей импульсов соединены со входами третьего и четвертого усилителей мощности соответственно, выходы первого, второго, третьего и четвертого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, вторые входы которых и вход гироскопа инерциального соединены с источником питания бортовой аппаратуры, а выход гироскопа инерциального соединен с первым входом элемента И, введены селектор импульсов по длительности, схема начальной установки, первый и второй триггеры, причем S-входы этих триггеров соединены с выходом схемы начальной установки, вход которой соединен с источником питания бортовой аппаратуры, выход гироскопа инерциального соединен со входом селектора импульсов по длительности и с С-входом второго триггера, выход которого соединен с третьим входом элемента И, R-вход первого триггера соединен с выходом селектора импульсов по длительности, а его выход соединен с D-входом второго триггера, датчик гироскопа инерциального выполнен оптронным, при этом выход второго расширителя импульсов соединен со входом второго усилителя мощности.
Селектор импульсов по длительности предпочтительно может быть выполнен на ждущем мультивибраторе и элементе И, второй вход которого соединен с выходом ждущего мультивибратора, а первый вход - со входом ждущего мультивибратора и входом селектора импульсов, а выход элемента И является выходом селектора импульсов.
Решение поставленной задачи достигается также тем, что гироскопический прибор, содержащий корпус, ротор в кaрдановом подвесе и фотооптический датчик угла, состоящий из фотодиода и светодиода, содержит шторку, укрепленную на наружной рамке карданового подвеса, обеспечивающую прерывание светового потока светодиода, при этом угловой размер шторки θшт выбран меньше угла прокачки θпр на величину угла заброса снаряда при управляемом полете с коэффициентом запаса Кзап=1,1... 1,3.
На фиг. 1 приведена блок-схема предлагаемой системы, где 1 - головка самонаведения, выполненная, например, как в прототипе, 2, 3, 4 и 5 - расширители импульсов, выполненные, например, как в прототипе, 6 - гироскоп инерциальный с оптронным датчиком, состоящим из токозадающего резистора 8, светодиода 7, шторки 9, фотодиода 10, нагрузочного резистора 11 и компаратора 12, 13 - селектор импульсов по длительности, состоящий, например, из ждущего мультивибратора 14 и элемента И 15, первый вход которого соединен со входом ждущего мультивибратора и входом селектора импульсов, второй вход - с выходом ждущего мультивибратора, а выход элемента И является выходом селектора импульсов, 16 - схема начальной установки, 17, 18 - первый и второй триггеры, 19 - элемент И, 20 - элемент ИЛИ, 21, 22, 23, 24 - первый, второй, третий и четвертый усилители мощности соответственно, 25 - рулевой привод, выполненный, например, как в прототипе, 26, 27, 28 и 29 - первая, вторая, третья и четвертая обмотки управления рулевого привода соответственно.
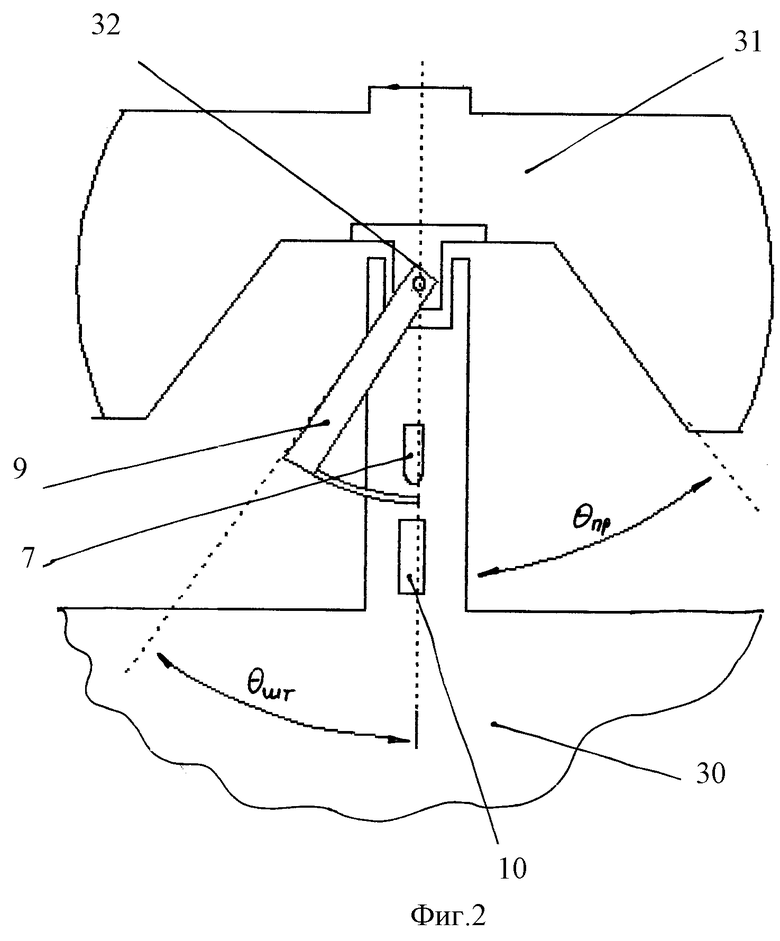
На фиг. 2 показан общий вид гироскопического прибора. Гироскопический прибор содержит корпус 30, ротор 31, установленный в кардановом подвесе 32, на наружной рамке которого укреплена шторка 9, обеспечивающая прерывание светового потока между светодиодом 7 и фотодиодом 10, при этом угловой размер шторки θшт меньше угла прокачки θпр на величину угла заброса снаряда при управляемом полете с коэффициентом запаса Кзап=1,1...1,3.
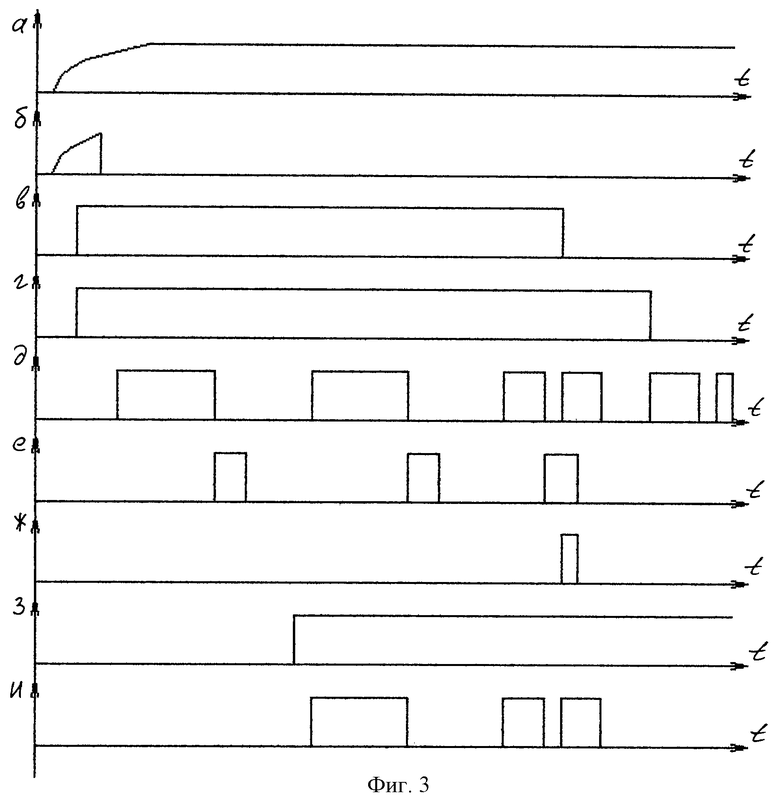
На фиг.3 приведены диаграммы работы устройства.
Работает система наведения следующим образом.
Производится выстрел и снаряд летит по баллистической траектории. В расчетной точке траектории разарретируется и раскручивается ротор гироскопа инерциального 6, выходят на режим батареи питания бортовой аппаратуры и ГСН 1, отделяется блок носовой, открывается входной зрачок ГСН. По мере выхода на режим бортовой батареи (фиг. 3а) на выходе схемы установки в исходное положение 16 вырабатывается импульс напряжения (фиг.3б), который, поступая на S-входы триггеров 17, 18, устанавливает на их выходах сигналы лог. 1 (фиг.3в, 3г), сигнал лог. 1 с выхода второго триггера 18 поступает на третий вход элемента И 19. Под действием вращения снаряда шторка 9 гироскопа инерциального на частоте вращения снаряда начинает периодически закрывать и открывать световой поток между светодиодом 7 - фотодиодом 10, а на нагрузочном сопротивлении 11 вырабатывается сигнал, близкий к меандру на частоте вращения снаряда, который с помощью компаратора 12 нормируется по амплитуде (фиг. 3д). Этот сигнал поступает на вход селектора импульсов 13. По заднему фронту этого импульса запускается ждущий мультивибратор 14 и на его выходе формируется импульс (фиг.3е), длительность которого на порядок меньше минимального периода вращения снаряда и т.к. угол пеленга снаряда меньше угла прокачки гироскопа, то шторка гироскопа, дойдя до своего крайнего положения, начнет движение назад, при этом световой поток между светодиодом 7 и фотодиодом 10 не возникает, и т.о. на выходе гироскопа формируется сигнал, близкий к меандру на частоте вращения снаряда. Передний фронт следующего сигнала с гироскопа появится значительно позже сформированного импульса мультивибратора 14, который не поступит на выход элемента И 15, а следовательно, на выходе селектора импульсов 13 сигнал будет отсутствовать (фиг.3ж) и триггеры 17 и 18 не изменят своего состояния. Одновременно сигнал с выхода гироскопа 6 поступает на первый вход элемента И 19. Но т.к. на выходе "Захват" (фиг. 3з) головки самонаведения 1 присутствует сигнал лог.0, который, поступая на второй вход элемента И 19, запрещает прохождение через него сигналов с выхода гироскопа инерциального 6.
При подлете снаряда к цели и при приеме отраженных от цели импульсов лазерного излучения ГСН формирует сигнал "Захват" (фиг.3з), который, поступая на второй вход элемента И 19, разрешает прохождение сигналов с выхода гироскопа инерциального 6 на вход "Компенсация" ГСН (фиг.2и) и через второй вход элемента ИЛИ 20 на первый усилитель мощности 21 и далее на первую обмотку управления 26 рулевого привода 25. Под действием этого сигнала ось ГСН будет стремиться разворачиваться в вертикальной плоскости вниз, а в ГСН при этом будет вырабатываться сигнал, компенсирующий влияние прецессии, обусловленной сигналом с инерциального гироскопа, при этом сигнал на выходе ГСН в процессе ее слежения за целью будет иметь следующий вид:
где f - функция, определяемая пеленгационной характеристикой ГСН, е - угловая скорость линии "снаряд-цель",  - угловая скорость прецессии головки под действием сигнала "Компенсация" с гироскопа инерциального.
- угловая скорость прецессии головки под действием сигнала "Компенсация" с гироскопа инерциального.
Указанный сигнал является исходным для формирования импульсов управления рулевым приводом автопилота (сигналов, вырабатываемых ГСН по выходам +У, -У, +Z, -Z).
В начальный момент, когда начальное угловое рассогласование оптической оси головки самонаведения с направлением на цель максимально, головка выдает максимальные по длительности команды, которые, поступая на расширители импульсов 2-5, проходят через них без изменения и далее поступают через усилители мощности 21-24 на обмотки управления 26-29 рулевым приводом 25, что приводит к отклонению рулей рулевого привода. Под действием управляющей перегрузки вектор скорости снаряда приближается к направлению линии визирования головки самонаведения снаряд- цель, что приводит к уменьшению углового рассогласования оптической оси головки самонаведения с направлением на цель. В процессе уменьшения этой ошибки команды по выходам головки самонаведения уменьшаются по длительности. И в тот момент, когда их длительность становится меньше времени срабатывания рулевого привода, расширители импульсов начинают их расширять до величины, при которой потери коэффициента команды близки к 1.
В случае набора снарядом угла пеленга, близкого к предельному углу прокачки гироскопа инерциального, и наличии больших колебаний снаряда шторка 9 гироскопа доходит до своего крайнего, близкого к соударению, положения и так как ее угловой размер θшт меньше предельного угла прокачки θпр гироскопа она не перекроет световой поток между светодиодом 7 и фотодиодом 10 при движении назад, при этом на выходе гироскопа сформируется короткий импульс напряжения (фиг. 3д). По заднему фронту этого импульса, поступающего на вход селектора импульсов по длительности 13, запускается ждущий мультивибратор 14 и сигнал с его выхода поступает на второй вход элемента И 15, на первый вход которого поступает сигнал с выхода гироскопа инерциального 6, но т.к. передний перепад сигнала с гироскопа появится значительно раньше среза импульса с выхода мультивибратора, то на выходе этого элемента И 15, а следовательно, и на выходе селектора импульсов формируется сигнал (фиг.3ж), который поступает на R-вход первого триггера 17 и устанавливает на его выходе сигнал лог.0 (фиг. 3в). Этот сигнал поступает на D-вход второго триггера 18, но не изменяет его состояние. При следующем сформированном импульсе с гироскопа инерциального по переднему фронту этого импульса сигнал с D-входа второго триггера 18 переписывается на его выход (фиг.2г) и далее поступает на третий вход элемента И 19 и запрещает прохождение сигналов с выхода гироскопа инерциального 6 на вход "Компенсация" головки самонаведения 1 и на рулевой привод 25. Т.о., импульсы с выхода гироскопа инерциального 6, не соответствующие действительности, не проходят на рулевой привод и в головку самонаведения и т.о. не влияют на работу системы, а управление снарядом осуществляется только по сигналам с головки самонаведения.
Т. о. , за счет исключения ложных команд с гироскопа инерциального в случае возможного соударения его наружной рамки, на которой размещена шторка, с корпусом гироскопа при предельных углах пеленга снаряда удалось повысить точность наведения системы.
Источники информации
1. "152-мм выстрел3ВОФ64(3ВОФ93) с осколочно-фугасным управляемым снарядом 3ОФ39 и зарядом 1 (Уменьшенным переменным зарядом). Техническое описание и инструкция по эксплуатации 3ВОФ64.00.00.000ТО (3ВОФ93.00.00.000ТО)". Москва. Военное издательство. 1990г., с.59-64.
2. Патент РФ 2138768, МКП6 F 42 B 15/01, от 27.09.1999 г.
3. Патент РФ 2141623, МКП6 G 01 С 19/12, от 10.08.1998 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205358C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205359C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2224972C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2187781C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2217692C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2000 |
|
RU2191344C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2205361C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2184925C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2138768C1 |
| СПОСОБ ВЗВЕДЕНИЯ БОРТОВЫХ СИСТЕМ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2191984C2 |
Изобретение относится к области вооружения, в частности к артиллерийским управляемым снарядам с лазерной головкой самонаведения. Технический результат: повышение точности наведения. Система наведения управляемого снаряда, содержит рулевой привод, гироскоп инерциальный с датчиком и головку самонаведения, вход "Компенсация" которой соединен с выходом элемента И, второй вход которого соединен с выходом "Захват" головки самонаведения, элемент ИЛИ, первый вход которого соединен с выходом первого расширителя импульсов, второй его вход соединен с выходом элемента И, а выход - со входом первого усилителя мощности. Выходы головки самонаведения "-У", "+У", "+Z" и "-Z" соединены со входами первого, второго, третьего и четвертого расширителей импульсов, а выходы третьего и четвертого расширителей импульсов соединены со входами третьего и четвертого усилителей мощности соответственно. Выходы первого, второго, третьего и четвертого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, вторые входы которых и вход гироскопа инерциального соединены с источником питания бортовой аппаратуры. Выход гироскопа инерциального соединен с первым входом элемента И, введены селектор импульсов по длительности, схема начальной установки, первый и второй триггеры, причем S-входы этих триггеров соединены с выходом схемы начальной установки, вход которой соединен с источником питания бортовой аппаратуры, выход гироскопа инерциального соединен со входом селектора импульсов по длительности и с С-входом второго триггера, выход которого соединен с третьим входом элемента И. R-вход первого триггера соединен с выходом селектора импульсов по длительности, а его выход соединен с D-входом второго триггера. Датчик гироскопа инерциального выполнен оптронным, при этом выход второго расширителя импульсов соединен со входом второго усилителя мощности. Гироскопический прибор, содержащий корпус, ротор в подвесе и фотооптический датчик угла, состоящий из фотодиода и светодиода, содержит шторку, укрепленную на наружной рамке карданового подвеса, обеспечивающую прерывание светового потока светодиода. При этом угловой размер шторки θшт выбран меньше угла прокачки θпр гироскопа на величину угла заброса снаряда при управляемом полете с коэффициентом запаса Кзап=1,1. ..1,3. 2 с. и 1 з.п. ф-лы, 3 ил.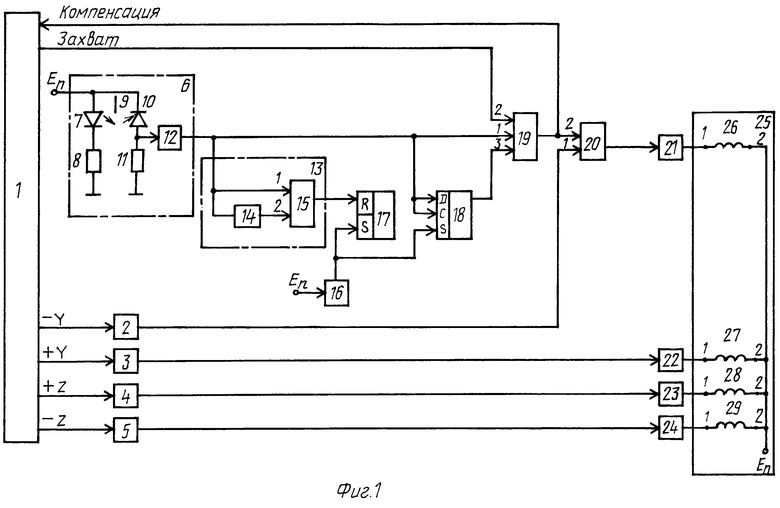
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2138768C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИБОР | 1998 |
|
RU2141623C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 1996 |
|
RU2114383C1 |
| СПОСОБ ПОДГОТОВКИ РАСТИТЕЛЬНОГО СЫРЬЯ К ИЗВЛЕЧЕНИЮ СОКА | 1999 |
|
RU2174362C2 |
| СПОСОБ ПОДГОТОВКИ РАСТИТЕЛЬНОГО СЫРЬЯ К ИЗВЛЕЧЕНИЮ СОКА | 1999 |
|
RU2174363C2 |

