Изобретение относится к области приборостроения и может быть использовано для перемещения узла в двух взаимно перпендикулярных направлениях.
Известен механизм линейного перемещения [1], содержащий корпус, подпружиненную подвижную площадку для юстируемого элемента и регулировочные узлы, каждый из которых состоит из двух пар сухарей в форме трапеции, соединенных регулировочными винтами, и расположенного между ними валика. Данная конструкция обладает невысокой надежностью и не обеспечивает устойчивое положение подвижной площадки с юстируемым элементом.
Наиболее близким аналогом по совокупности признаков является механизм линейного перемещения подвижного элемента в двух взаимно перпендикулярных направлениях [2]. Механизм линейного перемещения содержит корпус, состоящий из верхнего и нижнего оснований, между которыми зажата с возможностью плоского перемещения подвижная площадка с юстируемым элементом, и два регулировочных узла. Каждый регулировочный узел выполнен в виде валика и зубчато-реечной передачи, зубчатые колеса которой размещены на валике по двум противоположным сторонам площадки с юстируемым элементом. Валики установлены в подвижной площадке с возможностью вращения во взаимно перпендикулярных направлениях, а рабочие профили реек зубчато-реечной передачи каждого регулировочного узла выполнены на внутренних поверхностях оснований во взаимно перпендикулярных направлениях. Данный механизм линейного перемещения обладает недостаточной точностью из-за использования зубчато-реечной передачи в регулировочных узлах и имеет ограниченные эксплуатационные возможности из-за замкнутой формы корпуса механизма линейного перемещения.
Задачей изобретения является повышение точности и расширение эксплуатационных возможностей механизма линейного перемещения.
Поставленная задача достигается тем, что в механизм линейного перемещения, содержащем корпус, площадку для размещения юстируемого изделия и два регулировочных узла, в отличие от прототипа, введены две направляющие, каждая из которых выполнена в виде плоской пластины с прямоугольным пазом, причем эти две направляющие расположены под прямым углом друг к другу с образованием прямоугольного окна и с образованием общей плоскости скольжения, а площадка для размещения юстируемого изделия состоит из двух оснований, выполненных с возможностью размещения в образованном прямоугольном окне и при этом соединенных между собой с зазором, в котором размещены направляющие с возможностью скольжения друг относительно друга в общей плоскости скольжения, обеспечивая при этом перемещение площадки для размещения юстируемого изделия, регулировочные узлы выполнены в виде двух передач винт-гайка, винты которых являются частью взаимно перпендикулярных валов, установленных в корпусе с возможностью вращения, а гайки неподвижно закреплены на соответствующих направляющих.
Для компенсации зазора между площадкой и обеими направляющими используются два упругих элемента.
Такая конструкция обеспечивает устойчивое положение площадки для размещения юстируемого изделия практически в любых условиях эксплуатации и не может быть выведена из этого устойчивого равновесия (например динамическими воздействиями), а может лишь, будучи расположенной внутри прямоугольного окна, образованного двумя взаимно перпендикулярными подвижными направляющими, совершать линейные перемещения посредством регулировочных узлов, выполненных в виде передачи винт-гайка, в одной из двух направляющих совместно с другой направляющей и это всегда обеспечивается их взаимным скольжением в общей плоскости.
Выполнение регулировочного узла в виде передачи винт-гайка и обеспечение возможности перемещения площадки в прямоугольном окне, образованном двумя направляющими, позволяют повысить точность линейного перемещения.
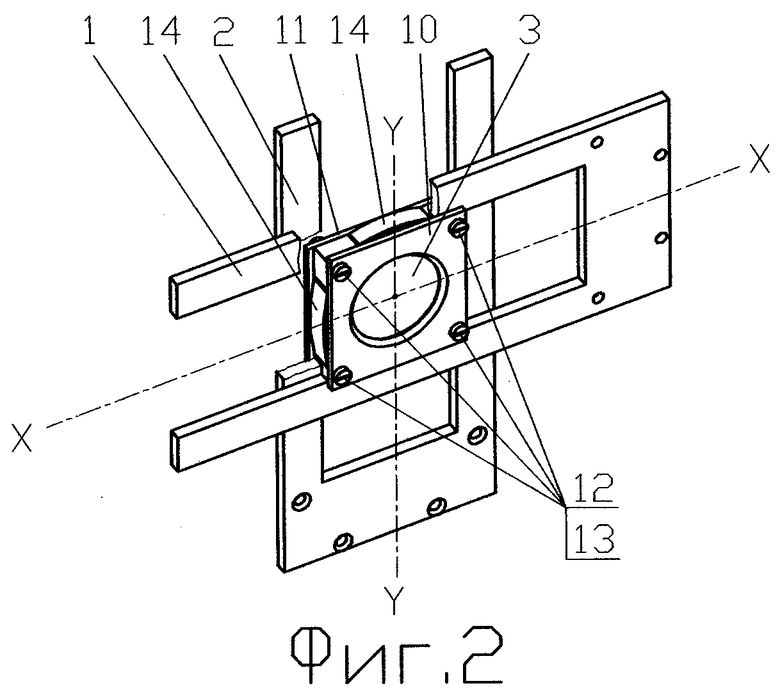
На фиг.1 показан общий вид механизма линейного перемещения в аксонометрии;
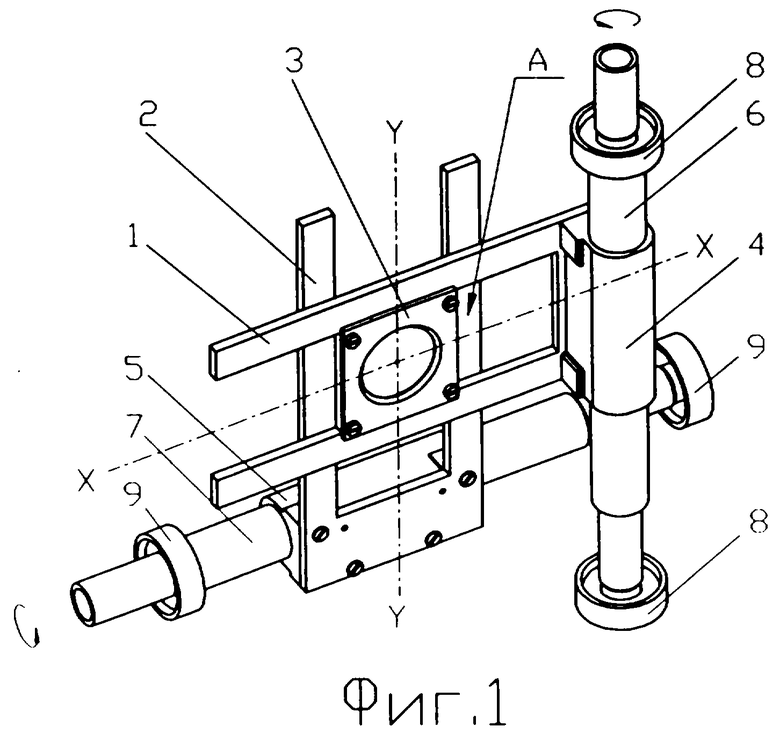
на фиг.2 - направляющие с площадкой для юстируемого изделия.
Механизм линейного перемещения (см.фиг.1) имеет две направляющие 1 и 2, каждая из которых выполнена в виде плоской пластины с прямоугольным пазом, имеющие общую взаимную плоскость скольжения А и развернутые в этой плоскости на прямой угол с образованием прямоугольного окна, в котором размещена площадка 3 для размещения юстируемого изделия, площадка 3 охватывает направляющие 1 и 2 с возможностью их скольжения друг относительно друга и имеет возможность перемещения в пазах пластин этих направляющих; два регулировочных узла, каждый из которых выполнен в виде передачи винт-гайка. Гайки 4 и 5 неподвижно закреплены соответственно на направляющих 1 и 2, в которых могут вращаться винты, являющиеся частью взаимно перпендикулярных валов 6 и 7, которые имеют по две опоры вращения 8 и 9, расположенные в корпусе 10. Конструкция корпуса может быть любой формы. В предложенной реализации устройства корпус имеет незамкнутую форму. В каждой паре винт-гайка при вращении двух взаимно перпендикулярных валов 6 и 7 положение винтов остается неизменным в пространстве, а каждая гайка 4 и 5 имеет возможность относительного перемещения вдоль оси ответного винта.
Площадка 3 для размещения юстируемого изделия (см. фиг.2) выполнена из двух оснований 11 и 12, соединенных между собой посредством винтов 13 и гаек 14 с образованием между собой зазора, в котором размещены направляющие 1 и 2 с возможностью скольжения друг относительно друга в общей плоскости скольжения. При этом основания 11 и 12 выполняют роль крышек и выполняют функцию каретки, которая может перемещаться в одной из двух взаимно перпендикулярных направляющих.
Площадка 3 может быть дополнена двумя упругими элементами 15, расположенными на боковых поверхностях во взаимно перпендикулярных направлениях для компенсации зазора между подвижной площадкой и обеими направляющими 1, 2 соответственно.
Механизм линейного перемещения работает следующим образом. При вращении вала 6 профиль резьбы винта входит в зацепление с резьбой гайки 4, которая закреплена на направляющей 1, и вызывает совместное поступательное перемещение направляющей 1 с подвижной площадкой 3 вдоль направляющей 2, что соответствует линейному перемещению площадки 3 вдоль оси У-У. Аналогично, при вращения вала 7 с расположенным на нем винтом за счет взаимодействия винта с гайкой 5, гайка поступательно перемещается с направляющей 2 совместно с площадкой 3, что соответствует линейному перемещению площадки вдоль оси Х-Х.
Задавая различные законы вращения валов 6 и 7 регулировочных узлов, предложенный механизм позволяет обеспечивать линейное перемещение площадки 3 с юстируемым изделием по любой траектории по заданному закону движения.
Применение предложенной конструкции позволяет повысить точность и значительно расширить эксплуатационные возможности за счет обеспечения возможности установки сменных юстируемых изделий. Конструкция направляющих позволяет устанавливать в них площадку с юстируемыми элементами и изделиями различного размера и формы, а также позволяет применять механизм в оптических трактах с плотным расположением оптических элементов и ограниченным (щелевым) радиальным подходом. Кроме того, эксплуатационные возможности расширяются за счет постоянного положения в пространстве двух взаимно перпендикулярных валов 6, 7 с расположенными на них винтами и их совместного расположения, невынесенного далеко за пределы оптической трубы. Механизм линейного перемещения может быть использован в автоматизированных устройствах.
Такая конструкция обеспечивает устойчивое положение площадки с юстируемым элементом практически в любых условиях эксплуатации, и площадка не может быть выведена из этого равновесия, а может лишь линейно перемещаться в одной плоскости в прямоугольных направляющих в двух взаимно перпендикулярных направлениях с помощью регулировочных узлов через передачу винт-гайка.
Источники информации
1. А.с. СССР №1307484, МКИ G 12 В 1/00.
2. А.с. СССР №1827684, МКИ G 12 В 1/00 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ПО ДВУМ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫМ НАПРАВЛЕНИЯМ | 2014 |
|
RU2579781C2 |
| Механизм линейного перемещения | 1991 |
|
SU1827684A1 |
| УСТРОЙСТВО ДЛЯ ЮСТИРОВКИ ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2008 |
|
RU2394259C1 |
| Юстировочное устройство | 1985 |
|
SU1277047A1 |
| Механизм линейного перемещения | 1985 |
|
SU1307484A1 |
| Устройство для линейной юстировки | 1988 |
|
SU1748196A1 |
| Устройство для юстировки оптических элементов | 1984 |
|
SU1210113A1 |
| УСТРОЙСТВО ДЛЯ ЮСТИРОВКИ ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2005 |
|
RU2336545C2 |
| МАЛАЯ ОПТИЧЕСКАЯ НАПРАВЛЯЮЩАЯ С ОСНОВАНИЕМ РЕЙТЕРА В ВАРИАНТАХ ИХ МЕХАНИЧЕСКОГО СОЕДИНЕНИЯ И ПРИМЕНЕНИЯ ПРИ ПОВЫШЕННОЙ ГРУЗОПОДЪЕМНОСТИ | 2012 |
|
RU2559980C2 |
| ГУСЕНИЧНЫЙ СВАРОЧНЫЙ РОБОТ И СПОСОБ УПРАВЛЕНИЯ ТАКИМ РОБОТОМ | 2019 |
|
RU2754728C1 |
Изобретение относится к области приборостроения и может быть использовано для перемещения узла в двух взаимно перпендикулярных направлениях. Изобретение направлено на повышение точности и расширение эксплуатационных возможностей. Это обеспечивается за счет того, что механизм линейного перемещения содержит корпус, площадку для размещения юстируемого изделия и два регулировочных узла. Кроме того, в него введены две направляющие, каждая из которых выполнена в виде плоской пластины с прямоугольным пазом, причем эти две направляющие расположены под прямым углом друг к другу с образованием прямоугольного окна и с образованием общей плоскости скольжения, а площадка для размещения юстируемого изделия состоит из двух оснований, выполненных с возможностью размещения в образованном прямоугольном окне и при этом соединенных между собой с зазором, в котором размещены направляющие с возможностью скольжения друг относительно друга в общей плоскости скольжения, обеспечивая при этом перемещение площадки для размещения юстируемого изделия, регулировочные узлы выполнены в виде двух передач винт-гайка, винты которых являются частью взаимно перпендикулярных валов, установленных в корпусе с возможностью вращения, а гайки неподвижно закреплены на соответствующих направляющих. Для компенсации зазора между площадкой и обеими направляющими используются два упругих элемента. 1 з.п. ф-лы, 2 ил.
| Механизм линейного перемещения | 1991 |
|
SU1827684A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ПО ДВУМ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫМНАПРАВЛЕНИЯМ | 1969 |
|
SU436394A1 |
| Устройство для перемещения приемника излучения | 1987 |
|
SU1534419A1 |
| Устройство для перемещения приемника излучения | 1989 |
|
SU1723552A1 |
| DE 2052502 A, 25.05.1972 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
