Изобретение относится к точному приборостроению и предназначено для точного перемещения узла в двух взаимно перпендикулярных направлениях.
Цель изобретения - расширение эксплуатационных возможностей.
На фиг.1 изображен механизм линейного перемещения; на фиг.2 - сечение А-А на фиг.1; на фиг.З - сечение Б-Б на фиг.1.
Механизм линейного перемещения содержит корпус 1, имеющий смежные стороны 2 и 3, образующие между собой прямой угол, подпружиненный по- двг-гасньш фланец 4, размещенный внутри прямого угла, с юстируемым элементом 5 и пружину 6, одним концом закрепленную на фланце 4, а другим - на регулировочном элементе, выполненном в виде винта 7 и гайки 8 и установленном на корпусе 1 в вершине прямого угла со сторонами 2 и 3.
Механизм также имеет два цилиндрических валика 9 и восемь сухарей 10, 17. Каждый из сухарей имеет в поперечном сечении форму равнобедренной трапеции, сухари установлены попарно меньшими основаниями друг к другу и связаны между собой регулировочными винтами 18 и 19, расположенными в осевых отверстиях 20, выполненных в сухарях.
I
Стороны 2 и 3, обращенные к Фланцу 4, имеют цилиндрические участки 21 и 22, образованные цилиндрами, ОСИ которых лежат в одной плоскости
Стороны фланца 4, противолежащие сторонам 2 и 3 корпуса, выполнены также с цилиндрическими участками 23 и 24.
Регулировочные винты 18 соединяют сухари 10-11 и 14-15. Регулировочные винты 19 выполнены в виде дифференциальных винтов и соединяют сухари 12-13 и 16-17. Резьба сухарей 12 и 16 незначительно отличается по шагу от резьбы сухарей 13 и 17. Сухари и валики 9 размещены в зазорах,образованных сторонами корпуса 1 и фланца 4 таким образом, что сухари 10-11 и 14-15 взаимодействуют своими боковыми сторонами с 1 част- ками 21 и 22 и валиками 9, а сухари 12-13 и 16-17 - с участками 23 и 24 и валиками 9.
Работа механизма происходит следующим образом.
Пружина 6 поджимает фланец 4 к вершине угла, образованног о сторонами 2 и 3 корпуса : . При этом сухари 10-11, 12-13, 14-15, 16-17, а также
валики 9 оказываются плотно зажатыми между фланцем 4 и корпусом 1. Для перемещения фланца 4, например вдоль оси X, вращают винты 18 и 19, расположенные последовательно параллельно этой оси (для перемещения фланца 4 вдоль оси Y вращают винты 18 и 19).
При этом грубое перемещение осуществляется при вращении винтов 18,
а Точное - вингов 19.
При вращении винта 18, например в сторону закручивания, сухари 10 и 11 будут сходиться, их боковые стороны будут скользить по цилиндрическим участкам 21 в: валику 9-, как бы выдавливая эти цилиндрические поверхности, при этом ось сухарей 1.0 и 11 смещается от стороны 2 корпуса 1. Валик 9 выдавливаясь из су
харей, будет перемещаться в ту же
сторону. Перемещение фланца 4 будет равно сумме перемещений осей сухарей 10 и 11 валика 9. При вращении дифференциального винта 19 общее перемещение фланца 4 равно сумме перемещений оси сухарей 12-13 и фланца 4 относительно сухарей 12-13.
Величина перемещения фланца 4 за 1 оборот регулировочного винта пропорциональна шагу винта 18 или разности шагов резьб дифференциального винта 19 и углам наклона боковых сторон сухарей.
Применение предложенной конструкции позволяет значительно расширить эксплуатационные возможности за счет обеспечения возможности установки сменных юстируемых элементов, так как корпус, относительно которого
происходит перемек(ение юстируемого элемента, имеет не замкнутую форму, а форму прямого угла. Это позволяет устанавливать в нем юстируемые фланцы различного размера и формы, а также позволяет применять механизм в оптических трактах с плотным расположением оптических элементов и ограниченным (щелевым) радиальным подхо- дом, так как регулировочные винты
располагаются параллельно.
Формула изобретения
Механизм линейного перемещения, содержаищй корпус, подпружиненный
подвижный фланец для юстируемого элемента и регулировочные винты, о т- личающийся тем, что, с це лью расширения эксплуатационных возможностей, он снабжен двумя парами регулировочных элементов, каждый из которых состоит из двух пар сухарей и валика, причем сухари вьшолнены
7484 ..„
в форме трапеции и расположены меТТР- шими основаниями напротив один другого и соединены регулировочными винтами причем валик расположен между этими парами сухарей, а поверхности корпуса и фланца со стороны сухарей выполнены в виде цилиндрического сектора.
И-xJ
21
5-6
Фиг. 2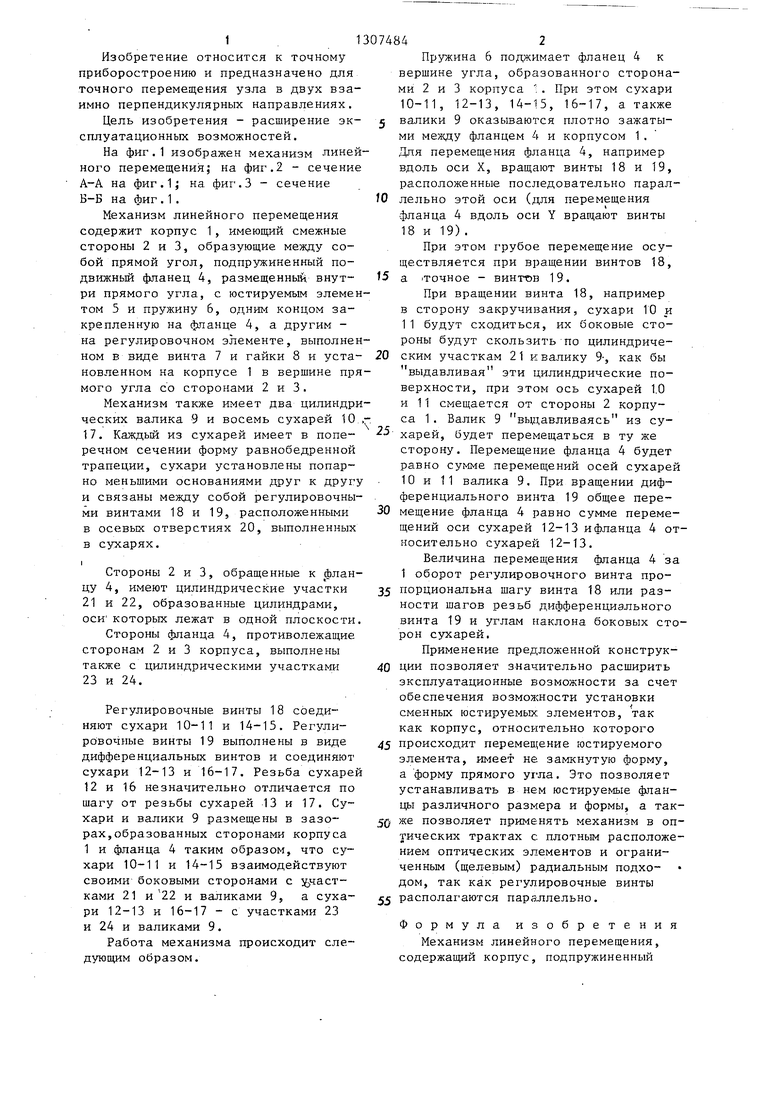
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2001 |
|
RU2239890C2 |
| Механизм линейного перемещения | 1991 |
|
SU1827684A1 |
| Юстировочный прибор | 1979 |
|
SU792200A1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО С РЕГУЛИРУЕМЫМ ХОДОВЫМ МЕХАНИЗМОМ | 2011 |
|
RU2566571C2 |
| Юстировочное устройство | 1989 |
|
SU1732316A1 |
| Устройство для юстировки оптических элементов | 1973 |
|
SU514260A1 |
| Устройство для юстирования | 1981 |
|
SU1026102A1 |
| Устройство опорное | 2021 |
|
RU2784568C1 |
| ЮСТИРОВОЧНОЕ УСТРОЙСТВО | 2019 |
|
RU2729953C1 |
| УСТРОЙСТВО ДЛЯ ЗАКРЕПЛЕНИЯ И ЮСТИРОВКИ КРУПНОГАБАРИТНЫХ ЭЛЕМЕНТОВ АНТЕННЫХ СИСТЕМ | 2022 |
|
RU2783768C1 |
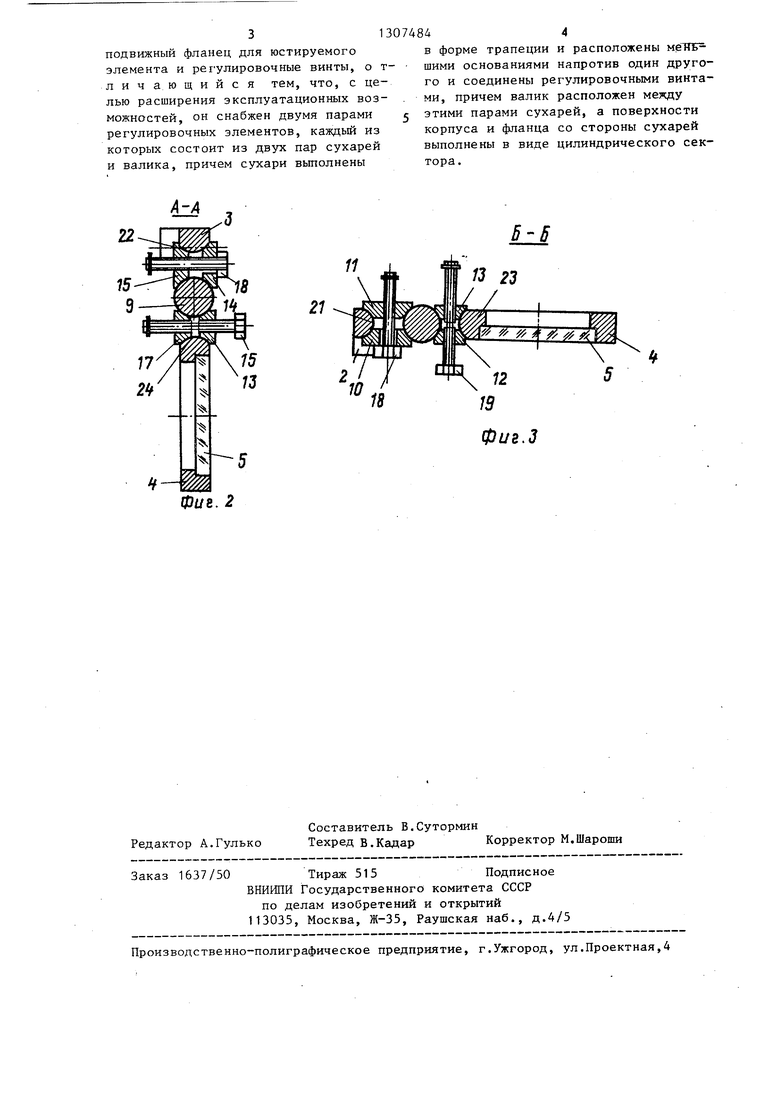
Изобретение относится к области точного приборостроения и предназначено для точного перемещения узла в двух взаимно перпендикулярных направлениях. Цель - расширение эксплуата- ционных возможностей механизма«линейного перемещения (МПП). Она достигается тем,что МЛП имеет две парьг регулировочных элементов, каждый из которых выполнен в виде винта 7 и гайки 8 и установлен на корпусе 1 в вершине прямого угла со сторонами 2. и 3, имеющими цилиндрические участки 21 и 22, образованные цилиндрами, оси которых лежат в одной плоскости. МЛП имеет также два валика 9 цилиндрической формы и восемь сухарей, каждый из которых имеет в поперечном сечении форму равнобердренной трапеции, установлены они попарно меньшими основаниями друг к другу и связаны между собой регулировочными винтами. 3 ил. i (Л jO о 4 00
| Механизм линейной юстировки | 1982 |
|
SU1026166A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
