Предлагаемое изобретение относится к области приборостроения и может быть использовано для автоматического регулирования положения объекта по двум взаимно перпендикулярным направлениям
Известна установка для регулирования положения объекта по взаимно перпендикулярным направлениям (SU №436394), содержащее два неподвижных привода и две каретки, установленные в направляющих прямолинейного перемещения, отличающиеся тем, что, с целью исключения переноса кареток, в каждой из них перпендикулярно к направляющим ее перемещения выполнены дополнительные направляющие, служащие для установки в них регулируемого объекта.
Известен двухкоординатный стол (SU №1226538), содержащий корпус с взаимно перпендикулярными направляющими, в которых размещены подвижные каретки, подвижной предметный столик, установленный в направляющих, жестко закрепленных на подвижных каретках во взаимно перпендикулярных плоскостях, и приводы подвижных кареток, закрепленные на корпусе и кинематически соединенные с подвижными каретками, отличающийся тем, что, с целью повышения точности перемещений и уменьшения габаритных размеров, предметный столик выполнен в виде двух прямоугольных планок, жестко соединенных между собой и расположенных одна на другой в параллельно перекрывающихся плоскостях под прямым углом, которые расположены на каретках с возможностью взаимодействия их продольных кромок с соответствующими направляющими подвижных кареток.
Механизм линейного перемещения (SU 1827684) юстируемого изделия, содержащий корпус, подвижную площадку для изделия и два регулировочных узла, отличающийся тем, что, с целью повышения надежности, каждый регулировочный узел выполнен в виде валика и зубчато-реечной передачи, зубчатые колеса которой размещены на валике по двум противоположным сторонам площадки для изделия, корпус выполнен виде жестко соединенных между собой верхнего и нижнего оснований, между которыми зажата площадка для изделия с возможностью прямолинейного перемещения, причем валики регулировочных узлов размещены взаимно перпендикулярно в площадке для изделия с возможностью вращения, а рабочие профили реек зубчатореечной передачи каждого регулировочного узла выполнены на внутренних поверхностях оснований во взаимно перпендикулярных направлениях.
Известно Устройство перемещения, совмещения и позиционирования (RU №2160884), содержащее каретку, механизм совмещения и позиционирования, закрепленный на каретке посредством упругих опор, а также приводы линейных перемещений по горизонтали каретки и механизма совмещения и позиционирования, отличающееся тем, что оно снабжено подвижным звеном, которое размещено на каретке и имеет неподвижные стойки, приводом линейных перемещений подвижного звена по горизонтали и основанием, образующим с установленной на нем кареткой двухкоординатный горизонтальный стол, привод линейных перемещений каретки и привод подвижного звена установлены соответственно на основании и на каретке по двум взаимно перпендикулярным направлениям, механизм совмещения и позиционирования включает предметный столик, пластину, установленную на предметном столике, платформу, подвижную нижнюю раму, связанную посредством упругих шарниров с платформой, подвижную верхнюю раму, по крайней мере, три привода линейных перемещений по вертикали, которые связаны с наружной стороны верхней рамой, которая связана с внутренней стороны с предметным столиком, механизм совмещения и позиционирования закреплен на подвижном звене двухкоординатного горизонтального стола посредством упругих шарниров, смонтированных в неподвижных стойках подвижного звена, приводы линейных перемещений по горизонтали механизма совмещения и позиционирования установлены на подвижном звене по двум взаимно перпендикулярным направлениям, связаны соответственно с нижней подвижной рамой и платформой, приводы линейных перемещений по вертикали верхней подвижной рамы установлены на платформе, а предметный столик связан с двумя приводами линейных перемещений по горизонтали, установленными с возможностью его вращения относительно вертикали.
Также известен механизм линейного перемещения (RU №2239890), содержащий корпус, площадку для размещения юстируемого изделия и два регулировочных узла, отличающийся тем, что введены две направляющие, каждая из которых выполнена в виде плоской пластины с прямоугольным пазом, причем эти две направляющие расположены под прямым углом друг к другу с образованием прямоугольного окна и с образованием общей плоскости скольжения, а площадка для размещения юстируемого изделия состоит из двух оснований, выполненных с возможностью размещения в образованном прямоугольном окне и при этом соединенных между собой с зазором, в котором размещены направляющие с возможностью скольжения друг относительно друга в общей плоскости скольжения, обеспечивая при этом перемещение площадки для размещения юстируемого изделия, регулировочные узлы выполнены в виде двух передач винт-гайка, винты которых являются частью взаимно перпендикулярных валов, установленных в корпусе с возможностью вращения, а гайки неподвижно закреплены на соответствующих направляющих.
Механизм линейного перемещения по п. 1 отличается тем, что для компенсации зазора между площадкой и обеими направляющими используются два упругих элемента.
Недостатками приведенных выше устройств являются: отсутствие возможности автоматического регулирования положением объекта.
Наиболее близким по технической сущности к предлагаемому устройству является устройство для перемещения рупора антенны по двум взаимно перпендикулярным направления «паспорт 32-1914-ООПС», в котором в качестве приводов горизонтального и вертикального перемещения объекта используются двигатели постоянного тока, каждый из которых установлен на резьбовом валу. На каждом из этих валов установлены через понижающие редукторы сельсин-датчики угла поворота оси, причем, передаточное число редуктора подобрано так, что перемещение гайки, соединенной с объектом, на всю длину резьбового вала соответствует одному обороту выходного вала сельсин-датчика. Двигатели включаются/выключаются оператором при помощи тумблеров, при этом контроль текущего положения рупора производится визуально, по индикаторам, подключенным к сельсин-датчикам приемникам положения рупора.
Целью предлагаемого изобретение является расширение функциональных возможностей и исключения ручного управления оператора из процесса позиционирования рупора.
Этот технический результат достигается тем, что на каждом валу заменяются сельсин-датчики положения на абсолютные энкодеры угла поворота, цифровой выход которых подключен к измерительному-вычислительному комплексу. Измерительный-вычислительный комплекс через силовые модули управляет режимами функционирования привода: разгон, номинальное движение, торможение, останов. Измерительный-вычислительный комплекс выполняет измерение радиотехнических параметров, поступающих с контролируемого изделия.
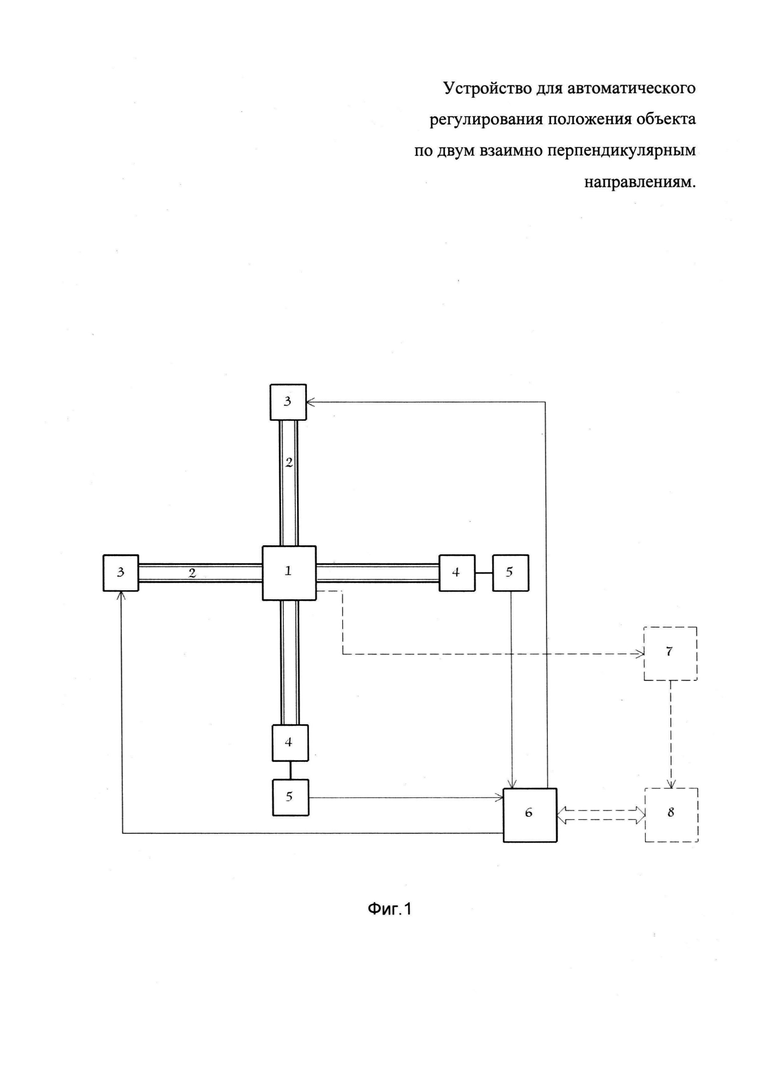
На фиг. 1 представлена блок-схема предлагаемого устройства для автоматического регулирования положения объекта по двум взаимно перпендикулярным направлениям.
Устройство состоит из следующих основных узлов: перемещаемый объект 1, ходовые винты 2, электродвигатели 3, понижающие редукторы 4, цифровые энкодеры угла поворота 5, блок управления приводами 6, измерительный-вычислительный комплекс 7, контролируемое изделие 8. Работает устройство следующим образом.
Объект 1, включающий в свой состав платформу с гайками на ходовых винтах 2, при их вращении, под действием электродвигателя 3, перемещается по двум взаимно перпендикулярным направлениям.
Коэффициент редукции понижающих редукторов 4 выбран так, что один оборот выходного вала понижающего редуктора соответствует перемещению объекта 1 из одного крайнего положения в другое по каждому из ходовых винтов 2.
Информация об угле поворота выходного вала понижающего редуктора 4 через цифровые энкодеры угла поворота 5, который соответствует текущим координатам положения объекта 1, поступает в блок управления приводами 6, который в свою очередь управляет электродвигателями 3.
При достижении текущих цифровых кодов положения объекта 1 заданным, электродвигатели останавливаются, и формируется сигнал, поступающий в измерительно-вычислительный комплекс 7, по которому измеряются радиотехнические параметры изделия 8.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ, СОВМЕЩЕНИЯ И ПОЗИЦИОНИРОВАНИЯ | 2000 |
|
RU2160884C1 |
| УСТРОЙСТВО АКТИВНОГО КОНТРОЛЯ И ИЗМЕРЕНИЯ ДЕЙСТВИТЕЛЬНЫХ РАЗМЕРОВ НАРУЖНОЙ ПОВЕРХНОСТИ ИЗДЕЛИЯ ТИПА ОБОЛОЧКА ВРАЩЕНИЯ | 2010 |
|
RU2420712C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЕРИОДИЧЕСКИХ МАГНИТНЫХ ПОЛЕЙ И ПОЛУЧЕНИЯ ИХ РАСПРЕДЕЛЕНИЙ В ПРОСТРАНСТВЕ И ВО ВРЕМЕНИ | 2000 |
|
RU2174235C1 |
| УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ ОБЪЕКТА | 2012 |
|
RU2517962C1 |
| Измерительный комплекс для контроля шероховатости поверхностей | 1989 |
|
SU1795277A1 |
| АНАЛИТИЧЕСКИЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ ПРИБОР | 1993 |
|
RU2098758C1 |
| БЕСКОНТАКТНЫЙ СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ, ИЗНОСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2252394C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ НАРУЖНОЙ ДИАГНОСТИКИ ТРУБОПРОВОДА И АВТОМАТИЗИРОВАННЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2757203C1 |
| МЕХАНИЗМ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2001 |
|
RU2239890C2 |
| Предметный столик электронного микроскопа | 1987 |
|
SU1636895A1 |
Устройство для автоматического регулирования положения объекта по двум взаимно перпендикулярным направлениям относится к области приборостроения и может быть использовано для автоматического регулирования положения объекта по двум взаимно перпендикулярным направлениям. Технический результат заключается в расширении функциональных возможностей и исключении ручного управления оператора из процесса позиционирования рупора. Поставленная цель достигается тем, что устройство содержит перемещаемый объект, ходовые винты, электродвигатели, понижающие редукторы, блок управления приводами, абсолютные энкодеры угла поворота, цифровой выход которых подключен к измерительно-вычислительному комплексу. Измерительно-вычислительный комплекс через силовые модули управляет режимами функционирования привода: разгон, номинальное движение, торможение, останов. Измерительно-вычислительный комплекс выполняет измерение радиотехнических параметров, поступающих с контролируемого изделия. 2 з.п. ф-лы, 1 ил.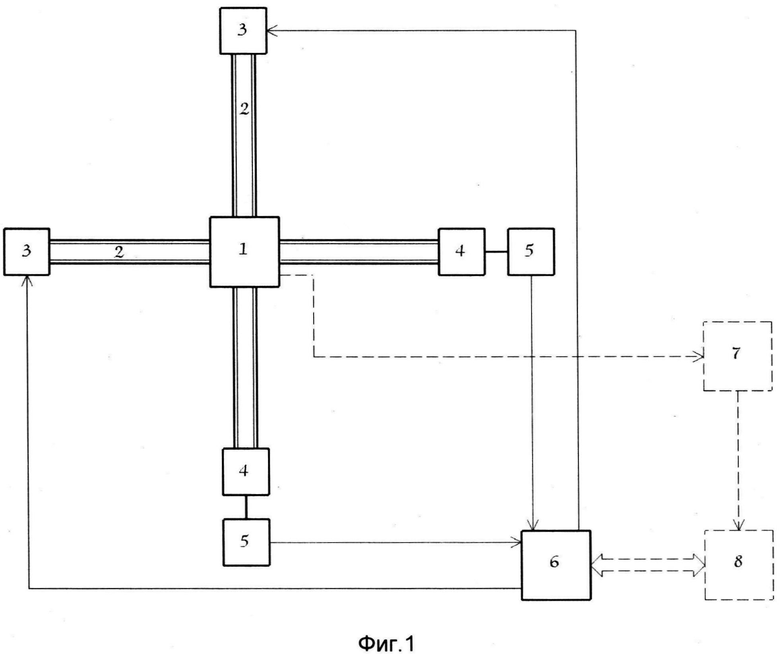
1. Устройство для автоматического регулирования положения объекта по двум взаимно перпендикулярным направлениям, содержащее перемещаемый объект, ходовые винты, электродвигатели, понижающие редукторы, блок управления приводами, отличающееся тем, что введены цифровые энкодеры угла поворота, выходы которых подключены к блоку управления приводами, задающему режимы работ электродвигателей: разгон, равномерное движение, торможение, останов.
2. Устройство по п. 1, отличающееся тем, что вращение ходовых винтов, вызывающее перемещение объекта, установленного на платформе с гайками на ходовых винтах и соответственно на выходе цифровых энкодеров угла поворота, формирование цифровых кодов положения объекта.
3. Устройство по п. 1, отличающееся тем, что при достижении текущих цифровых кодов положения объекта заданным электродвигатели останавливаются и формируется сигнал, поступающий в измерительный вычислительный комплекс, по которому измеряются радиотехнические параметры изделия.
| Устройство для синхронного перемещения датчиков бесконтактного толщиномера | 1982 |
|
SU1163142A1 |
| WO 2009099917 A1, 13.08.2009 | |||
| CN 203432563 U, 12.02.2014. | |||

