Предлагаемое изобретение относится к области медицины, в частности к механотерапевтическим аппаратам пассивного действия для восстановления формы и функции суставов.
Известно, что для более быстрого восстановления формы и функции сустава необходимо начинать движения сразу после операции. При этом необходимо исключить взаимное давление между фрагментами оперированного сустава, чтобы не нарушать заживление тканей. Для этих целей применяются шарнирно-дистракционные аппараты, например принятое в качестве прототипа устройство для восстановления функции суставов - полезная модель №24923. Данное устройство содержит неподвижную и подвижную платформы для фиксации сегментов конечностей, связанные между собой шарнирно, при этом подвижная платформа соединена с электроприводом, двигатель которого подключен к системе управления, подвижная платформа соединена с электроприводом через дополнительную тягу посредством датчика сопротивления движению, а система управления дополнительно содержит датчик угла, оптимизатор угловой скорости, первый и второй триггеры Шмитта, задатчик предельного объема движений по углу, задатчик предельного момента сопротивления, генератор тактовых импульсов, а также логический блок, включающий коммутатор, триггер данных и логический элемент “исключающее или”, при этом выход датчика сопротивления движению подключен к функциональному входу первого триггера Шмитта, вход управления которого соединен с выходом задатчика предельного момента сопротивления, выход датчика угла, подсоединенного к шарниру, подключен к функциональному входу второго триггера Шмитта, управляющий вход которого соединен с задатчиком предельного объема движений по углу, выходы обоих триггеров Шмитта подключены к входам логического блока, выходом соединенного со входом преобразователя, соединенным с выходом оптимизатора угловой скорости, входом подключенного к датчику угла.
Общими существенными признаками прототипа, совпадающими с существенными признаками предлагаемого технического решения, являются наличие опорной и подвижной платформ для фиксации сегментов конечностей, электропривода с системой управления скоростью вращения и реверсом, датчика, реагирующего на сопротивление движению.
Качество шарнирно-дистракционных аппаратов определяется точностью позиционирования фрагментов сустава относительно оси вращения. В устройстве-прототипе о точности репозиции косвенную информацию несет датчик сопротивления движению. Если фрагменты недостаточно точно настроены, то при пробном вращении подвижной платформы относительно опорной возникают предельные взаимные давления между фрагментами, что вызывает излишние напряжения мышц, которые оказывают воздействие на вал привода, увеличивая момент сопротивления, что и фиксирует датчик. Система управления содержит элементы, которые обеспечивают реверс двигателя при условии выхода момента сопротивления со стороны мышц за пороговое значение. Кроме того, в приводе оптимизируется скорость вращения, исходя из достижения максимального объема движения. За счет этого в системе человек - аппарат достигается самоустановка области движения и скорости движения. Область движения и объем движения являются косвенной интегральной визуальной информацией для настройки фрагментов. Настройка производится исходя из максимального объема движений. Для этого приходится сравнивать объемы движений до и после настройки и применять так называемые приемы последовательных приближений.
Основным недостатком вышеописанного устройства является невысокая точность и особенно низкая скорость настройки положения параметров. Это объясняется тем, что процесс настройки является многопараметрическим, а настройка производится по интегральной визуальной информации. Изменение области движения и объема движений может в описанном устройстве достигаться и поворотом фрагментов, и их линейными перемещениями. Число компонентов настройки может достигать 8 (по две линейные и две угловые координаты одного фрагмента и другого), а выходная визуальная информация опосредована только через область движения и диапазон движения (два параметра).
Предлагаемым изобретением решается техническая задача повышения точности и скорости регулировки положения фрагментов сустава, а соответственно, сокращения времени и улучшения качества восстановления сустава.
Для достижения названного технического результата предложен шарнирно-дистракционный аппарат с системой контроля и настройки, содержащий неподвижное основание, выполненную с возможностью закрепления-открепления на нем опорную платформу, а также подвижную платформу, каждая из которых включает в себя связанные через двухстепенные дистракторы балки и спицевые фермы для крепления фрагментов сустава, выполненные из двух скоб, жестко соединенных между собой парой резьбовых шпилек, электропривод, оснащенный системой управления скоростью вращения и реверсом, и многокомпонентные тензовесы, соединенные с многоканальным аналого-цифровым преобразователем, снабженным системой обработки информации; причем тензовесы одним концом жестко соединены с валом электропривода, а вторым концом с балкой подвижной платформы с возможностью рассоединения; ось вращения электроприводом подвижной платформы находится в пределах регулировки центральной спицы фермы опорной платформы; каждый из двухстепенных дистракторов выполнен из двух ортогонально расположенных регулировочных элементов, содержащих резьбовую шпильку с как минимум тремя продольными пазами с вложенными в них шариками, вставленными в сепаратор, втулку, надетую по посадке на шарики снаружи сепаратора, гайку, контактирующую с втулкой непосредственно, и гайку, контактирующую с втулкой через установленную между ним и втулкой пружину, при этом втулки регулировочных элементов каждого двухстепенного дистрактора жестко соединены между собой непосредственно или через проставку, причем резьбовые шпильки ферм опорной и подвижной платформ одновременно являются резьбовыми шпильками регулировочных элементов двухстепенных дистракторов, при том, что одни концы расположенных ортогонально им резьбовых шпилек регулировочных элементов жестко закреплены на балках, а вторые выполнены с возможностью взаимного шарнирного соединения-отсоединения.
Отличительными признаками предложенного устройства является то, что оно содержит неподвижное основание для установки на него опорной платформы с возможностью ее снятия, а также, что опорная и подвижная платформы включают в себя связанные через двухстепенные дистракторы балки и спицевые фермы для крепления фрагментов сустава, выполненные из двух скоб, жестко соединенных между собой парой резьбовых шпилек, что в роли датчика сопротивления движению выступают многокомпонентные тензовесы, соединенные с многоканальным аналого-цифровым преобразователем, связанным с системой обработки информации. Причем один конец (основание) тензовесов жестко соединен с валом электропривода, а второй конец соединен с балкой подвижной платформы с возможностью рассоединения, при этом ось вращения электроприводом подвижной платформы находится в пределах регулировки центральной спицы фермы опорной платформы. Причем каждый из двухстепенных дистракторов выполнен из двух ортогонально расположенных регулировочных элементов, содержащих резьбовую шпильку с как минимум тремя продольными пазами с вложенными в них шариками, вставленными в сепаратор, втулку, надетую по посадке на шарики снаружи сепаратора, гайку, контактирующую с втулкой непосредственно, и гайку, контактирующую с втулкой через установленную между ним и втулкой пружину, при этом втулки регулировочных элементов каждого двухстепенного дистрактора жестко соединены между собой непосредственно или через проставку, причем резьбовые шпильки ферм опорной и подвижной платформ одновременно являются резьбовыми шпильками регулировочных элементов двухстепенных дистракторов, при том, что одни концы расположенных ортогонально им резьбовых шпилек регулировочных элементов жестко закреплены на балках, а вторые выполнены с возможностью взаимного шарнирного соединения-отсоединения. Здесь особенно важным является то, что производится взаимная регулировка не ферм, а платформ, содержащих фермы и балки, наличие многокомпонентных тензовесов, позволяющих разложить нагрузки на составляющие по координатам, системы обработки и визуализации данной информации, а также дистракторов, позволяющих производить соответствующие многостепенные регулировки.
Многокомпонентные весы выполняются в виде стержня с упругими элементами, на которые наклеиваются тензодатчики. Основные принципы по разделению нагрузок на компоненты изложены в книге А.И.Чуднова Методы и техника летных испытаний самолетов на прочность, М.: Машиностроение, 1972 г., стр. 96...106, а схемы чувствительных упругих элементов применяемых в стержневых тензовесах приведены в книге Р.А.Макарова Тензометрия в машиностроении, М.: Машиностроение, 1975 г., стр. 128...130.
Для разделения нагрузок покомпонентно (на три ортогональные силы и три момента) выходные сигналы с тензодатчиков, усиливая, подают на входы аналого-цифровых преобразователей. Цифровые данные с преобразователей могут быть обработаны на компьютере и представлены на дисплее в виде диаграмм сил и диаграмм моментов, действующих относительно осей выбранной ортогональной системы координат, совпадающей с системой координат, образуемой ортогональными регулировочными элементами аппарата.
В частности, выделенный таким образом элемент Mz - момент вращения поворотной платформы, может являться сигналом обратной связи для системы управления реверсом двигателя, обеспечивающей ограничение внутрисуставных нагрузок. Компоненты Мх и My - моменты относительно осей, лежащих в плоскости ортогональной опорной платформы, могут быть пораздельно уменьшены регулировкой опорной фермы - поворотом ее в плоскости платформы и в указанной выше плоскости. А силы Fx и Fy - регулировкой поворотной фермы - изменением продольного и поперечного диастаза (т.е. линейными перемещениями по указанным осям). Здесь направление Х совпадает с продольной осью фрагмента, закрепленного на опорной ферме, a Y - с осью фрагмента, закрепленного на поворотной ферме при угле между ними в 90°, ось Z ортогональна Х и Y.
Чтобы тензовесы измеряли внутрисуставные силы, необходимо опорную и поворотную платформы разделить. Только в этом случае поворотный фрагмент “повиснет” на тензовесах. Основание тензовесов при этом будет закреплено жестко навалу двигателя. С этой целью между опорной и поворотной платформой установлено разъемное соединение. При пассивном ношении аппарата это соединение замкнуто, при работе-настройке оно разомкнуто. Также соединение опорной платформы с основанием привода выполнено разъемным.
Жесткость пружин регулировочных элементов при этом, как правило, выбирается из условия, что усилие полного сжатия будет меньше прочности костной ткани.
Благодаря наличию указанных отличительных признаков в совокупности с известными, указанными выше, достигается следующий технический результат - повышается точность настройки фрагментов относительно оси вращения при повышении быстродействия (за счет использования вместо интегральной оценки настройки покомпонентно разделенной). Кроме того, за счет возможности соединения-отсоединения подвижной платформы относительно тензовесов и двигателя, а также подвижной платформы относительно опорной, платформы находятся на суставных фрагментах в отрегулированном на аппарате после операции положении, что позволяет разрабатывать сустав без повторной настройки на более простых аппаратах, например аппарате-прототипе.
В результате поиска по источникам патентной и научно-технической информации совокупность признаков, характеризующая предложенное устройство, не была обнаружена. Таким образом, предложение соответствует критерию охраноспособности “новое”.
На основании сравнительного анализа предложенного устройства с известным уровнем техники по источникам научно-технической и патентной литературы можно утверждать, что между совокупностью признаков, в том числе и отличительных, и выполняемых ими функций и достигаемых целей неочевидная причинно-следственная связь. На основании выше изложенного можно сделать вывод о том, что техническое решение не следует явным образом из уровня техники, и, следовательно, соответствует критерию охраноспособности “изобретательский уровень”.
Предложенное устройство может найти применение при лечении тяжелых заболеваний суставов, требующих артропластики, а также для послеоперационного восстановления функции любых суставов - локтевых, коленных, голеностопных и плечевых, а также для точной репозиции любых костных фрагментов. Таким образом, предлагаемое изобретение соответствует критерию охраноспособности “промышленно применима”.
Техническое решение поясняется чертежами, представленными на фиг.1-3.
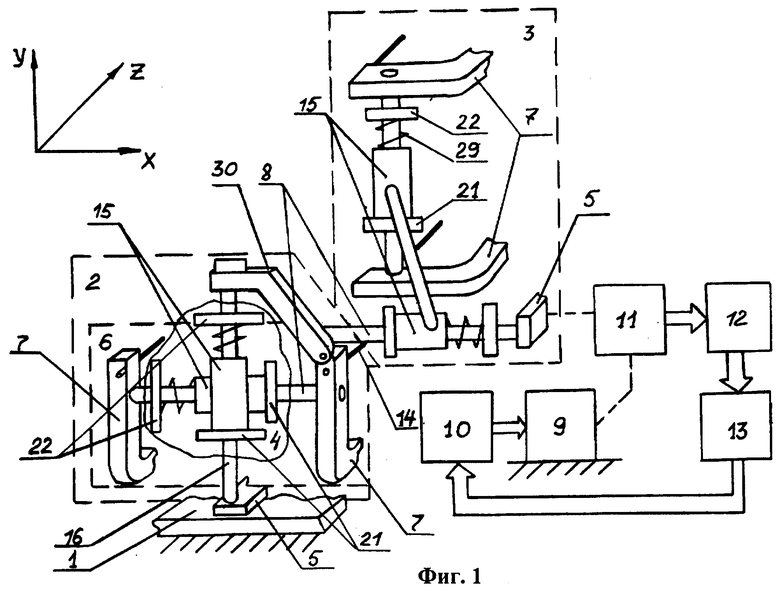
На фиг.1 приведена функциональная схема шарнирно-дистракционного аппарата с системой контроля и настройки.
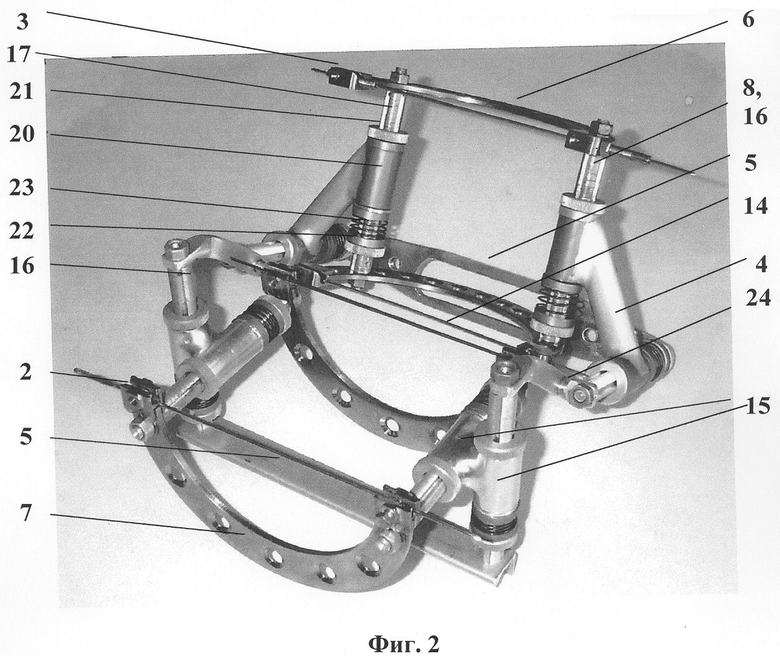
На фиг.2 представлена фотография опорной и подвижной платформы в соединенном виде.
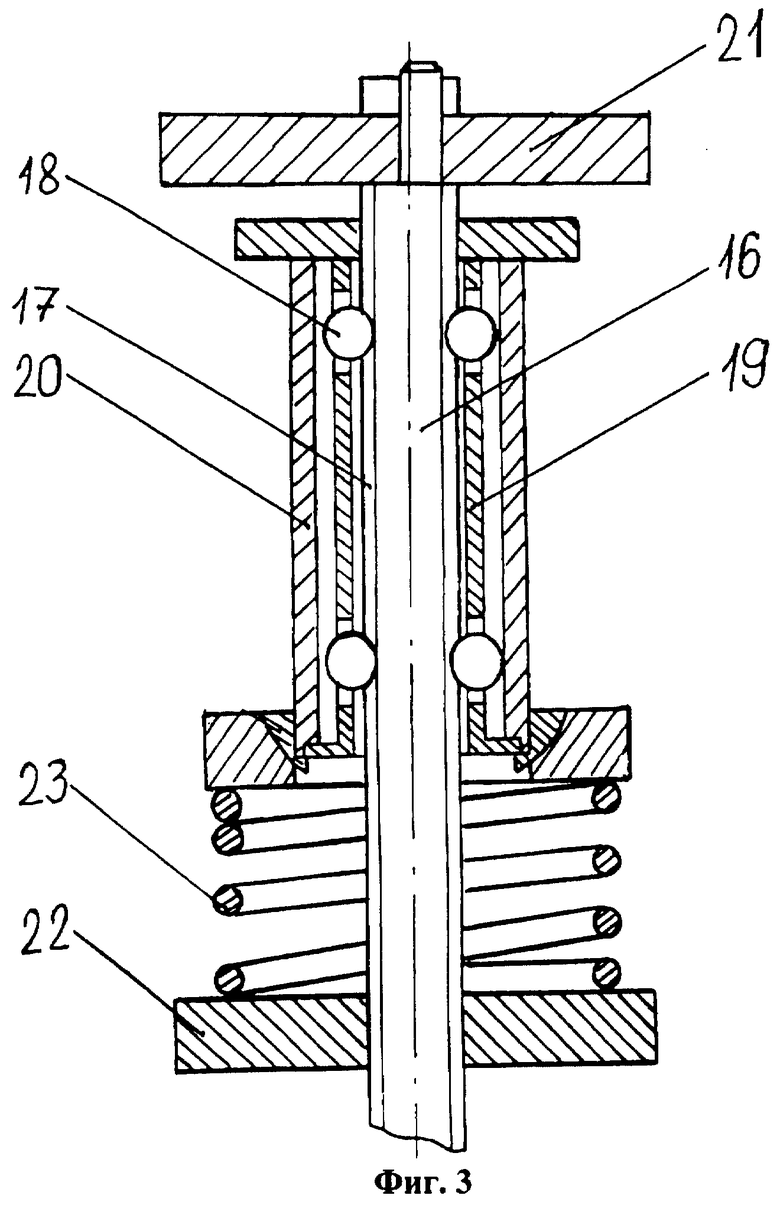
На фиг.3 приведен дистракционный элемент.
Изображенный на фиг.1-3 шарнирно-дистракционный аппарат с системой контроля и настройки содержит неподвижное основание 1, выполненную с возможностью закрепления-открепления на нем опорную платформу 2, а также подвижную платформу 3, каждая платформа включает в себя связанные через двухстепенные дистракторы 4 балки 5 и спицевые фермы 6 для крепления фрагментов сустава, выполненные из двух скоб 7, жестко соединенных между собой парой резьбовых шпилек 8, а также электропривод 9, оснащенный системой управления скоростью вращения и реверсом 10, и многокомпонентные тензовесы 11, соединенные с многоканальным аналого-цифровым преобразователем (АЦП) 12, снабженным системой обработки информации 13; причем тензовесы 11 одним концом жестко соединены с валом электропривода 9, а вторым концом с балкой 5 подвижной платформы 3 с возможностью рассоединения; ось вращения электроприводом 9 подвижной платформы 3 находится в пределах регулировки центральной спицы 14 фермы 6 опорной платформы 2.
Каждый из двухстепенных дистракторов 4 выполнен из двух ортогонально расположенных регулировочных элементов 15, содержащих резьбовую шпильку 16 с как минимум тремя продольными пазами 17 с вложенными в них шариками 18, вставленными в сепаратор 19, втулку 20, надетую по посадке на шарики 18 снаружи сепаратора 19, гайку 21, контактирующую с втулкой 20 непосредственно (в данном случае через жестко соединенную со втулкой шайбу - на чертеже не обозначена), и гайку 22, контактирующую с втулкой 20 через установленную между ним и втулкой пружину 23 (в данном случае между пружиной 23 и втулкой 20 установлена шарнирная гайка - на чертеже не обозначена), при этом втулки 20 регулировочных элементов 15 каждого двухстепенного дистрактора 4 жестко соединены между собой, причем резьбовые шпильки ферм 6 опорной 2 и подвижной 3 платформ одновременно являются резьбовыми шпильками 16 регулировочных элементов 15 двухстепенных дистракторов 4, при том, что одни концы расположенных ортогонально им резьбовых шпилек 16 регулировочных элементов 15 жестко закреплены на балках 5, а вторые выполнены с возможностью взаимного соединения-отсоединения через шарнир 24.
Устройство работает следующим образом.
В операционную поступают в разделенном виде опорная 2 и подвижная платформы 3 со спицевыми фермами 6, а также разъемный шарнир 24. После проведения спиц (в том числе центральной 14) навешивается опорная платформа 2 и производится хирургический доступ и артропластика сустава. Затем навешивается подвижная платформа 3 и замыкается разъемный шарнир 24. Производится первичная настройка шарнирно-дистракционного аппарата фиг.2. При этом первая регулировочная гайка (гайки) 21 выполняет роль позиционера регулируемых элементов, а вторая регулировочная гайка (гайки) 22, поджимающая пружину к втулке, играет роль задатчика компрессионной силы.
Данная первичная настройка производится следующим образом. Если после замыкания опорной 2 и подвижной 3 платформ фрагменты сустава соприкасаются (а это зависит от реального положения спиц в фрагментах), то фермы 6 из-за взаимного давления фрагментов начнут перемещаться в дистракторах 4 относительно платформ 2 и 3, сжимая при этом пружины 23. Также при этом втулки 20 отойдут от контактирующих с ними гаек 21. Зазор между гайкой 21 и втулкой 20 свидетельствует о том, что между фрагментами отсутствует зазор. Чтобы появился необходимый зазор (диастаз) между фрагментами, мы должны гайки 21 вращать до соприкосновения со втулкой 20 и далее на число оборотов, вычисляемое по формуле n=з/h, где з - требуемый зазор; h - шаг резьбы. Поскольку все регулировочные элементы 15 в дистракторах 4 выполнены ортогонально друг другу, то практически можно считать в первом приближении, что перекрестные связи по осям отсутствуют. Чтобы исключить чрезмерные усилия на мягкие ткани при первичной регулировке, гайки 22 выставляются в положения, при которых пружины 23 сжимаются минимально.
Если же после замыкания платформ 2 и 3 фрагменты суставов не соприкасаются, то фермы 6 остаются на месте, упираясь в гайки 21. В этом случае мы должны вращать гайки 21 в обратном направлении до выхода их из соприкосновения со втулками 20. Этот момент будет свидетельствовать о моменте касания фрагментов. После чего необходимо гайки 21 начать вращать в обратном направлении, как описано выше, для задания диастаза.
Визуальная информация доступна, пока не закрыт хирургический доступ. После закрытия хирургического доступа, как правило, требуется вторичная настройка, поскольку внутрисуставные мягкие ткани при закрытии деформируются, что и влияет на взаимные давления между фрагментами. Кроме того, реальный центр взаимного вращения фрагментов находится, как правило, вне оси центральной спицы 14.
На вторые сутки после операции производится вторичная настройка взаимного расположения фрагментов, а также положения их оси вращения относительно друг друга. Для этого опорная платформа 2 устанавливается на неподвижное основание 1 и фиксируется на нем. Поворотная платформа 3 через балку 5 соединяется с тензовесами 11, соединенными с валом электропривода 9 и с многоканальным аналого-цифровым преобразователем (АЦП) 12, снабженным системой обработки информации 13. Разъемный шарнир 30 размыкается. Включается электропривод 9. Система обработки информации (тензосигналов) 13 посылает значение момента вращения Mz в систему управления 10, соединенную с электроприводом 9, которая работает по алгоритму, описанному в прототипе. При этом в биотехническом комплексе самоустанавливаются объем движения, скорость движения и область движения. После первичной настройки объем движений мал и может составлять 5...10°. Останавливают электропривод 9 и в статическом положении производят измерения тензосигналов по всем шести компонентам, например, поочередно с помощью многоканального АЦП 12 вводят выходные сигналы тензовесов 11 в систему обработки 13. На дисплее указанной системы силы и моменты могут быть представлены в виде диаграмм. Также можно тензоинформацию представить в виде деформационных взаимных сдвижек между фрагментами, поскольку между силами и деформациями существует определенная связь. Эта связь может быть установлена следующим образом.
Регулируя усилие сжатия между фрагментами путем вращения гайки 21, контактирующей со втулкой 20, и отмечая перемещение этой гайки 21, а также измеряя тензовесами 11 это усилие, мы можем определить жесткость суставных тканей в направлении оси сжатия. Величина жесткости и устанавливает связь между силой и деформацией. Система обработки 13 тензосигналов может представить картину сдвижек между фрагментами в динамической форме. На сегодня известны программы обработки типа Skada, позволяющие изображать движения тел, управляемые внешними сигналами. Деформационные картины могут полностью заменить рентгенснимки. Причем эта визуальная информация доступна в реальном режиме времени. Для этого следует применить систему обработки тензосигналов, подобную так называемым МРВ (монитор реального времени).
Регулируя положение ферм 6 и одновременно наблюдая взаимные деформации фрагментов в реальном масштабе времени, однозначно быстрее и точнее можно настроить шарнирно-дистракционный аппарат на конечности пациента. Положения ферм 6 регулируют, вращая гайки 21. При этом в процессе настройки гайки 22 находятся в положении, при котором пружины 23 разжаты и не создают значительного усилия на дистракторы. Это условие необходимо для свободного перемещения ферм 6 относительно платформ 2 и 3. Тем самым фрагменты сустава не создают значительного давления на мягкие ткани в процессе настройки. По окончании настройки, когда диаграммы сил и моментов сведены к минимальным, гайками 22 сжимают пружины до предела, тем самым фиксируя жесткое положение ферм 6 и соответственно положение фрагментов. Теперь можно включать систему управления приводом 10. При этом движение в суставе будет проходить строго в одной плоскости при минимальном давлении в мягких околосуставных тканях.
После проведения сеанса настройки и разработки сустава подвижный шарнир 24 снова замыкается, фиксируя жесткое и отрегулированное взаимное положение ферм 6 и фрагментов. При этом шарнирно-дистракционный аппарат остается на больном. Для проведения дальнейшей разработки сустава повторная настройка, как правило, не требуется, и восстановление (разработка) движением может осуществляться на более простом аппарате, например, построенном на базе устройства-прототипа.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИРНО-ДИСТРАКЦИОННЫЙ АППАРАТ | 2003 |
|
RU2240748C1 |
| КОМПРЕССИОННО-ДИСТРАКЦИОННЫЙ ЭЛЕМЕНТ ЧРЕЗКОСТНОГО АППАРАТА (ВАРИАНТЫ) | 2003 |
|
RU2240747C1 |
| КОМПРЕССИОННО-ДИСТРАКЦИОННЫЙ АППАРАТ (ВАРИАНТЫ) | 2004 |
|
RU2277391C1 |
| КОМПРЕССИОННО-ДИСТРАКЦИОННЫЙ ЭЛЕМЕНТ ЧРЕСКОСТНОГО АППАРАТА | 2004 |
|
RU2262319C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФУНКЦИИ СУСТАВОВ МЕХАНОТЕРАПИЕЙ | 2005 |
|
RU2277406C1 |
| АППАРАТ ДЛЯ ВОССТАНОВЛЕНИЯ ФУНКЦИИ СУСТАВОВ МЕХАНОТЕРАПИЕЙ | 2005 |
|
RU2277894C1 |
| Ортопедический трансформер | 2017 |
|
RU2687610C2 |
| Компрессионно-дистракционный аппарат | 1983 |
|
SU1107853A2 |
| КОМПРЕССИОННО-ДИСТРАКЦИОННЫЙ АППАРАТ ПЛАТОВА | 1991 |
|
RU2061429C1 |
| Аппарат для восстановления функций пястно-фаланговых суставов | 1988 |
|
SU1586693A1 |
Изобретение относится к медицинской технике, а именно к механотерапевтическим аппаратам пассивного действия для восстановления формы и функции суставов. Шарнирно-дистракционный аппарат с системой контроля и настройки содержит неподвижное основание, выполненную с возможностью закрепления-открепления на нем опорной платформы, а также подвижной платформы, каждая из которых включает в себя связанные через двухстепенные дистракторы балки и спицевые фермы для крепления фрагментов сустава, выполненных из двух скоб, жестко соединенных между собой парой резьбовых шпилек, электропривод, оснащенный системой управления скоростью вращения и реверсом, и многокомпонентные тензовесы, соединенные с многоканальным аналого-цифровым преобразователем, снабженным системой обработки информации. Причем тензовесы одним концом жестко соединены с валом электропривода, а вторым концом с балкой подвижной платформы с возможностью рассоединения. Ось вращения электроприводом подвижной платформы находится в пределах регулировки центральной спицы фермы опорной платформы. Изобретение позволяет повысить точность и скорость регулировки положения фрагментов сустава, а соответственно, сократить время и улучшить качество его восстановления. 3 ил.
Шарнирно-дистракционный аппатат с системой контроля и настройки, характеризующийся тем, что он содержит неподвижное основание, выполненную с возможностью закрепления-открепления на нем опорную платформу, а также подвижную платформу, каждая из которых включает в себя связанные через двухстепенные дистракторы балки и спицевые фермы для крепления фрагментов сустава, выполненные из двух скоб, жестко соединенных между собой парой резьбовых шпилек, электропривод, оснащенный системой управления скоростью вращения и реверсом, и многокомпонентные тензовесы, соединенные с многоканальным аналого-цифровым преобразователем, снабженным системой обработки информации, причем тензовесы одним концом жестко соединены с валом электропривода, а вторым концом с балкой подвижной платформы с возможностью рассоединения; ось вращения электроприводом подвижной платформы находится в пределах регулировки центральной спицы фермы опорной платформы; каждый из двухстепенных дистракторов выполнен из двух ортогонально расположенных регулировочных элементов, содержащих резьбовую шпильку с как минимум тремя продольными пазами с вложенными в них шариками, вставленными в сепаратор, втулку, надетую по посадке на шарики снаружи сепаратора, гайку, контактирующую с втулкой непосредственно, и гайку, контактирующую с втулкой через установленную между ним и втулкой пружину, при этом втулки регулировочных элементов каждого двухстепенного дистрактора жестко соединены между собой, причем резьбовые шпильки ферм опорной и подвижной платформ одновременно являются резьбовыми шпильками регулировочных элементов двухстепенных дистракторов, при этом одни концы расположенных ортогонально им резьбовых шпилек регулировочных элементов жестко закреплены на балках, а вторые выполнены с возможностью взаимного шарнирного соединения-отсоединения.
| Устройство для указания направления электрического тока | 1931 |
|
SU24923A1 |
| Карточный регистратор | 1918 |
|
SU1424A1 |
| АППАРАТ ДЛЯ РЕПОЗИЦИИ КОСТЕЙ ГОЛЕНИ | 1991 |
|
RU2020891C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

