Предлагаемое изобретение относится к области медицины, в частности к механотерапевтическим аппаратам пассивного действия для восстановления функции суставов.
Известен широкий ряд аппаратов для восстановления подвижности суставов механотерапией, например аппараты, описанные в книге "Лечение заболеваний суставов с помощью шарнирно-дистракционных аппаратов", Москва, Медицина, 1975 г., стр.58, 54, 50, патентах РФ № 2016556 и 2240749, книге "Повреждения локтевого сустава при занятиях спортом", Москва, Лесар-арт, 2000 г., стр.157.
Все данные устройства содержат неподвижное и подвижное устройства (фермы), фиксирующие сегменты конечностей, а в патентах № 2016556 и 2240749 еще и платформы, на которых закрепляются фермы. В первом случае фермы, а во втором платформы связанны между собой шарнирно. При этом применяются цилиндрические шарниры, позволяющие производить движения суставных концов строго в одном направлении (в одной плоскости). За прототип предлагаемого технического решения может быть принят любой из аппаратов, описанных в патентах № 2016556 и 2240749, т.к. любой из них содержит существенные признаки, совпадающие с существенными признаками предлагаемого технического решения, - наличие неподвижной и подвижной платформ для закрепления устройств, фиксирующих сегменты конечностей, связанных между собой шарнирно.
Как уже говорилось, все вышеперечисленные аппараты позволяют производить относительные циклические движения суставных концов строго в одной плоскости. Однако, как показали исследования, на програмно-аппаратном комплексе "Радуга-ЦИТО", описанном в патенте РФ № 2240749 "Шарнирно-дистракционный аппарат с системой контроля и настройки", наименьшие нагрузки на околосуставные мышцы локтевого сустава достигаются при движении локтевой кости не в одной плоскости, а по винтовой траектории, т.е. биомеханическая ось взаимного перемещения суставных концов при сгибе-разгибе перемещается по сложной пространственной траектории. В известных же аппаратах чрескостной фиксации, например описанных в книге "Лечение заболеваний суставов с помощью шарнирно-дистракционных аппаратов", ось вращения совпадает с центральной спицей. Следствием несовпадения механической и биомеханической оси сгиба-разгиба сустава является возникновение значительных болевых ощущений, связанных с напряжением мышц в районе сустава, а также, что особенно опасно, разрушение кости центральной спицей. В аппаратах же, описанных в патентах № 2016556 и 2240749, ось вращения хотя и находится за пределами ферм, не позволяет производить естественные для сустава физиобиологические движения, что соответственно вызывает, хотя и в меньшей степени, болевые ощущения у пациентов, что безусловно сказывается на диапазоне углов сгиба разгиба, интенсивности работы на аппарате, а значит и на времени восстановления сустава.
Предлагаемым изобретением решается техническая задача создания устройства, в котором ось вращения максимально соответствует биомеханической оси реального сустава, что позволит ускорить время и качество его восстановления.
Для достижения названного технического результата в аппарате для восстановления функции суставов, содержащем неподвижную и подвижную платформы для закрепления устройств, фиксирующих сегменты конечностей, связанные между собой шарнирно, шарниры выполнены шаровыми, а ось вращения подвижной платформы относительно неподвижной образует с центрами подвижных частей шарниров эксцентриситет ε/2, в котором ε вычисляется по формуле ε=с·tgα, где с - расстояние между центрами подвижных частей шарниров, а α - вальгусный угол сустава. Для более точного регулирования эксцентриситета - приведения его в соответствие с биомеханическими параметрами каждого конкретного пациента (вальгусный угол α находится в диапазоне от 7 до 15°) - шаровые шарниры целесообразно снабжать регуляторами эксцентриситета.
При этом в качестве устройств, фиксирующих сегменты конечностей, могут применяться как устройства чрескостной фиксации (фермы со спицами), так и устройства манжетного типа и т.п. Для этого данные устройства, например, в составе аппаратов, фиксирующих взаимное расположение конечностей, располагаются на платформах и раскрепляются друг относительно друга (подвижное относительно неподвижного), после чего можно проводить сеанс механотерапии.
Отличительными признаками предложенного аппарата являются выполнение шарниров шаровыми, при чем ось вращения подвижной платформы относительно неподвижной образует с центрами подвижных частей шарниров эксцентриситет ε/2, в котором ε вычисляется по формуле ε=с·tgα, где с - расстояние между центрами подвижных частей шарниров, a α - вальгусный угол сустава, а также дополнительно то, что шаровые шарниры оснащены регуляторами эксцентриситета.
Благодаря наличию указанных отличительных признаков в совокупности с известными (указанными в ограничительной части формулы) достигается следующий технический результат - создан аппарат для восстановления функции суставов, в котором ось сгиба-разгиба располагается максимально близко к естественной биомеханической оси сустава, при этом подвижная локтевая часть сустава совершает трехстепенное движение с изменением вальгусного угла и ротацией. Благодаря этому происходит максимально быстрое нетравмирующее восстановление сустава.
В результате поиска по источникам патентной и научно-технической информации совокупность признаков, характеризующая предложенный аппарат для восстановления функции суставов, не была обнаружена. Таким образом, предлагаемое устройство соответствует критерию охраноспособности "новое".
На основании сравнительного анализа предложенного аппарата с известным уровнем техники по источникам научно-технической и патентной литературы можно утверждать, что между совокупностью признаков, в том числе и отличительных, и выполняемых ими функций и достигаемых целей имеется неочевидная причинно-следственная связь. На основании вышеизложенного можно сделать вывод о том, что техническое решение не следует явным образом из уровня техники и, следовательно, соответствует критерию охраноспособности "изобретательский уровень".
Предложенное техническое решение может найти применение при восстановлении функций локтевых суставов с использованием любых, как чрескостных, так и мягких (манжетных) механотерапевтических устройств неподвижной фиксации и, следовательно, соответствует критерию охраноспособности "промышленно применимо".
Конструкция предложенного аппарата для восстановления функции суставов поясняется чертежами фиг.1, 2.
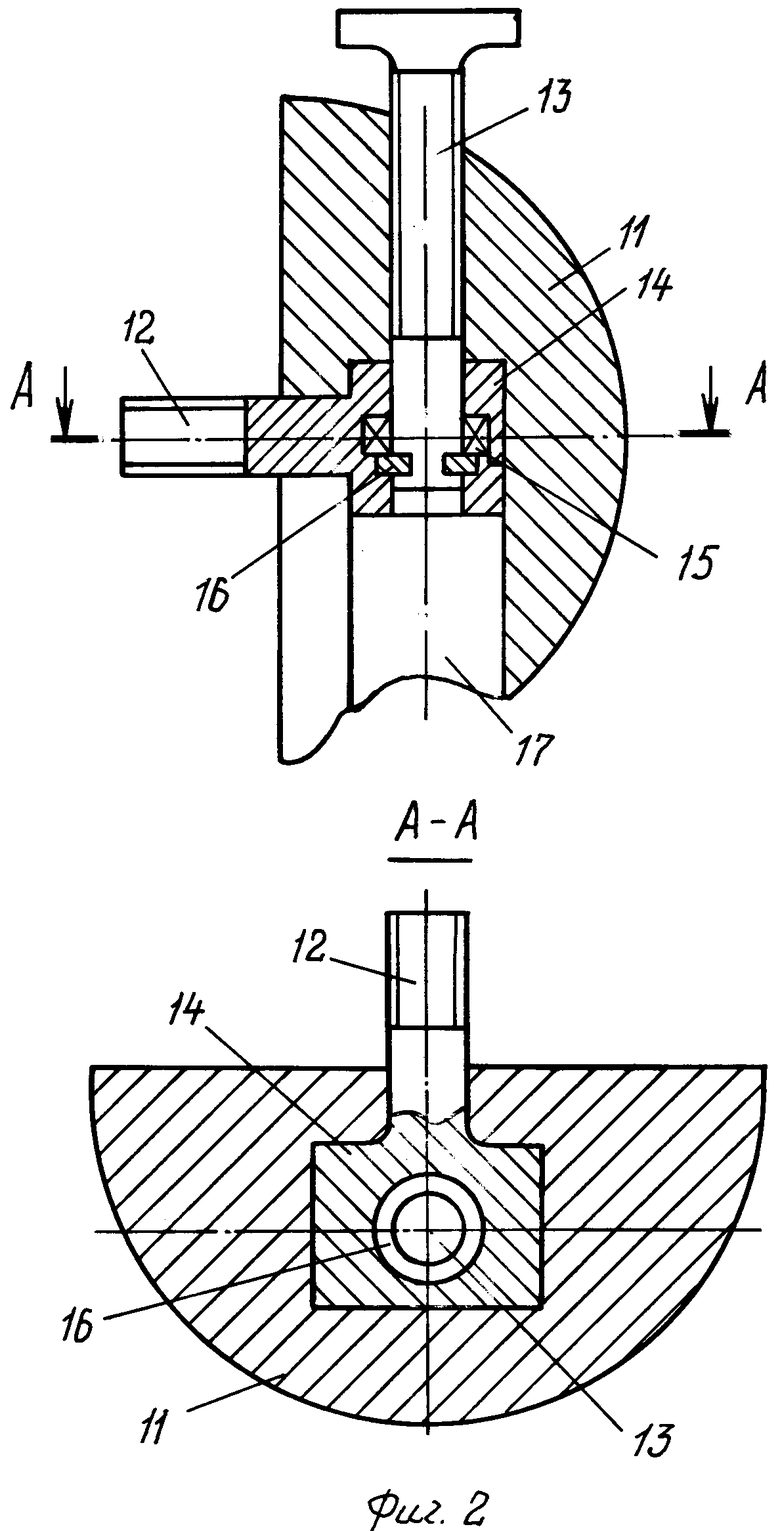
На фиг.1 изображен сам аппарат для восстановления функции суставов, на фиг.2 изображен пример выполнения регулятора эксцентриситета.
Изображенный на фиг.1 аппарат для восстановления функции суставов механотерапией содержит неподвижную 1 и подвижную 2 платформы, на которых неподвижно закреплены устройства, фиксирующие сегменты конечностей (в данном случае фермы), - неподвижная (опорная) ферма (не приведена) и подвижная (поворотная) ферма 3, каждая из которых состоит из пары скоб 4, соединенных между собой шпильками 5. Скобы 4 оснащены спицедержателями 6 для закрепления проведенных через фрагменты конечности спиц 7. Ферма 3 закреплена на платформе 2 при помощи кронштейнов 8. Платформы 1 и 2 соединены между собой посредством шаровых шарниров 9, которые состоят из жестко соединенных с неподвижной платформой 1 шаровых опор 10 и жестко соединенных с подвижной платформой 2 полушаров 11. Платформа 2 соединена с полушарами 11 осями 12, которые образуют с центрами полушаров 11 эксцентриситет ε/2. Вальгусный угол в диапазоне от 7 до 15° регулируется при помощи изменения эксцентриситета следующим механизмом. В полушаре 11 выполнен Т-образный паз 17, в котором при помощи регулировочного винта 13 ходит Т-образное основание 14 оси 12. Винт 13 соединен с основанием 14 посредством расположенного в пазу основания 14 подшипника 15, зафиксированного пружинной шайбой 16.
Вышеописанный аппарат работает следующим образом.
При операции на пациента устанавливаются неподвижная и подвижная 3 фермы, которые затем фиксируются друг относительно друга жестко или шарнирно с фиксацией дистрактором. Перед началом работы на предложенном аппарате производится настройка эксцентриситета шарниров 9. Для этого определяется вальгусный угол α пациента путем замера данного угла на здоровом суставе. Общий эксцентриситет ε определяется по формуле ε=с·tgα, где с - расстояние между центрами подвижных частей шарниров 9, α - вальгусный угол сустава, а эксцентриситет каждого шарнира 9 соответственно равен ε/2. Его настройка производится путем вращения регулировочных винтов 13, благодаря чему основание 14 оси 12 перемещается внутри Т-образного паза в полушаре 11. После установки соответствующего данному больному эксцентриситета неподвижная ферма закрепляется на неподвижной платформе 1, а ферма 3 на подвижной платформе 2, после чего фермы рассоединяются между собой. Затем начинают производить циклические движения для восстановления формы и функции сустава. При этом благодаря эксцентриситету ось 12 взаимного вращения платформ 1 и 2 совершает сложные движения, которые характеризуются при полном разгибе вальгусным углом α, равным в зависимости от физиологических особенностей пациента значению, находящимуся в диапазоне от 7 до 15°. При сгибе данный угол уменьшается до нулевого значения в согнутом суставе 0. Движение платформ 1 и 2 может осуществляться как усилиями самого больного, так и посредством электропривода, как например как в аппарате по патенту № 2016556.
Таким образом, путем замены одностепенного шарнирного механизма, который применяется во всех известных шарнирно-дистракционных аппаратах, на трехстепенной шарнирный механизм жесткой пространственной фиксации достигнута задача обеспечения нетравмирующих ранних движений в суставе. Предложенный трехстепенной механизм приводится в движение одностепенным приводом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОССТАНОВЛЕНИЯ ФУНКЦИИ СУСТАВОВ МЕХАНОТЕРАПИЕЙ | 2005 |
|
RU2277406C1 |
| ЭНДОПРОТЕЗ ЛОКТЕВОГО СУСТАВА | 2004 |
|
RU2264196C1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ФУНКЦИИ СУСТАВОВ МЕХАНОТЕРАПИЕЙ | 2002 |
|
RU2214212C1 |
| МОДУЛЬНОЕ ОРТОПЕДИЧЕСКОЕ КРЕСЛО-ТРЕНАЖЕР | 2009 |
|
RU2423961C2 |
| ЭНДОПРОТЕЗ ЛОКТЕВОГО СУСТАВА | 2004 |
|
RU2264195C1 |
| ШАРНИРНО-ДИСТРАКЦИОННЫЙ АППАРАТ | 2003 |
|
RU2240748C1 |
| АППАРАТ ДЛЯ ВОССТАНОВЛЕНИЯ БИОМЕХАНИЧЕСКОЙ ОСИ КОНЕЧНОСТИ | 2003 |
|
RU2255694C2 |
| ШАРНИРНО-ДИСТРАКЦИОННЫЙ АППАРАТ С СИСТЕМОЙ КОНТРОЛЯ И НАСТРОЙКИ | 2003 |
|
RU2240749C1 |
| СПОСОБ УДЛИНЕНИЯ БЕДРЕННОЙ КОСТИ С ОДНОВРЕМЕННЫМ ВОССТАНОВЛЕНИЕМ БИОМЕХАНИЧЕСКОЙ ОСИ КОНЕЧНОСТИ | 2010 |
|
RU2441617C1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ЧАСТНОГО И ОБЩЕГО БИОМЕХАНИЧЕСКОГО БАЛАНСА ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА ЧЕЛОВЕКА НА ОРГАНИЗМЕННОМ И СЕГМЕНТАРНЫХ УРОВНЯХ В СТАТИЧЕСКОМ, ДИНАМИЧЕСКОМ И КИНЕТИЧЕСКОМ РЕЖИМАХ | 1997 |
|
RU2145831C1 |
Изобретение относится к области медицины. Аппарат содержит неподвижную и подвижную платформы для закрепления устройств, фиксирующих сегменты конечностей. Платформы связаны между собой шарнирно. Шарниры выполнены шаровыми. Ось вращения подвижной платформы относительно неподвижной образует с центрами подвижных частей шарниров эксцентриситет ε/2, в котором ε вычисляется по формуле ε=c·tgα, где с - расстояние между центрами подвижных частей шарниров, а α - вальгусный угол сустава. Изобретение позволяет ускорить время и повысить качество восстановления суставов. 1 з.п. ф-лы, 2 ил.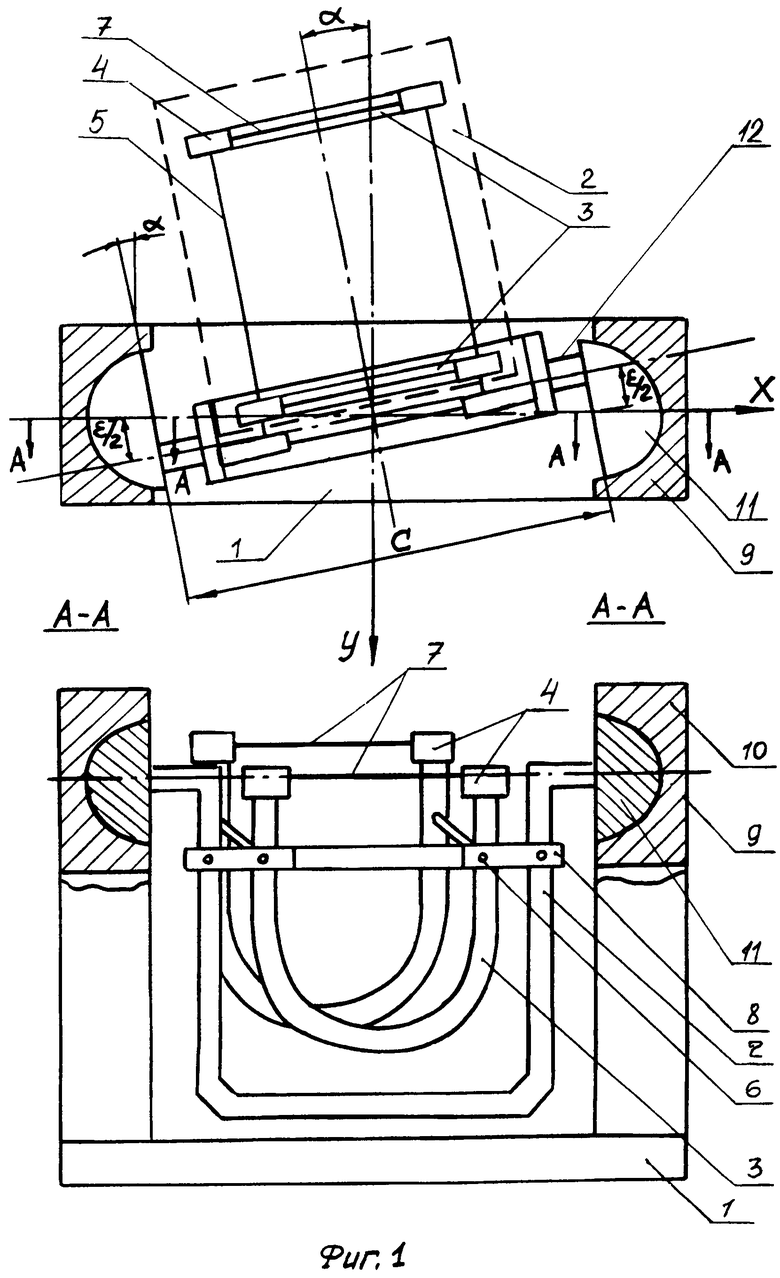
| ШАРНИРНО-ДИСТРАКЦИОННЫЙ АППАРАТ С СИСТЕМОЙ КОНТРОЛЯ И НАСТРОЙКИ | 2003 |
|
RU2240749C1 |
| ВОЛКОВ М.В., ОГАНЕСЯН О.В | |||
| Восстановление формы и функции суставов и костей, Москва, Медицина, 1986, с.40-41 | |||
| US 5399147 А, 21.03.1995 | |||
| US 6217532 A, 17.04.2001 | |||
| US 4727860 A, 01.03.1988. | |||

