Предлагаемое изобретение относится к области медицины, в частности к способам механотерапевтического восстановления функции суставов.
Известен способ восстановления функции локтевого сустава механотерапией, описанный в ряде источников - патентах РФ №№ 2016556 и 2240749, книге Повреждения локтевого сустава при занятиях спортом. - М.: Лесар-арт, 2000 г., стр.157. Основными существенными признаками данного способа, присущими всем аналогам, каждый из которых может быть принят за прототип, является задание реверсивных движений в суставе так, что движение сгиба-разгиба суставных концов происходит в одной плоскости (в одном направлении). Разница между аналогами состоит лишь в реализации привода. Общими существенными признаками прототипа, совпадающими с предлагаемым техническим решением, являются реверсивные относительные движения сгиба-разгиба суставных концов.
Эффективность восстановления функции суставов механотерапией тем выше, чем меньше сокращение мышц-стабилизаторов сустава. За счет расслабления мышц во время пассивного движения значительно снижается взаимодавление суставных поверхностей. Снижение указанного давления в свою очередь обуславливает меньшее сокращение мышц-стабилизаторов сустава. Указанная причинно-следственная связь может быть названа механо-биологической системой с положительной обратной связью. Восстановление суставов известным способом, особенно с использованием обратной связи, дает положительные результаты. Однако, как показали исследования на програмно-аппаратном комплексе "Радуга-ЦИТО", описанном в патенте РФ №2240749 "Шарнирно-дистракционный аппарат с системой контроля и настройки", наименьшие нагрузки на околосуставные мышцы локтевого сустава достигаются при движении локтевой кости не в одной плоскости, а по винтовой траектории, т.е. биомеханическая ось взаимного перемещения суставных концов при сгибе-разгибе перемещается по сложной пространственной траектории. Следствием несовпадения механической и биомеханической оси сгиба-разгиба сустава является возникновение болевых ощущений, что безусловно сказываются на диапазоне углов сгиба разгиба, интенсивности работы на аппарате, а значит и на времени восстановления сустава.
Предлагаемым изобретением решается техническая задача снижения внутрисуставного давления в суставе за счет реализации биомеханической траектории движения, что позволит ускорить время и качество его восстановления.
Для достижения названного технического результата в способе восстановления функции суставов, включающем реверсивные относительные движения сгиба-разгиба сегментов сустава, одновременно с относительным движением сгиба-разгиба на угол α осуществляют поворот подвижного сегмента сустава относительно его продольной оси на угол γ, а также отклонение свободного конца подвижного сегмента сустава относительно плоскости сгиба-разгиба суставных концов на угол β, определяемые исходя из условий
γ=arctg(ε/c·sinα), β=arctg(ε/c·cosα),
где ε - эксцентриситет и c - межцентровое расстояние - характерные биометрические параметры блоковидного тела сустава.
Отличительными признаками предложенного способа являются следующие: одновременно с относительным движением сгиба-разгиба на угол α осуществляют поворот подвижного сегмента сустава относительно его продольной оси на угол γ, а также отклонение свободного конца подвижного сегмента сустава относительно плоскости сгиба-разгиба суставных концов на угол β, определяемые исходя из условий
γ=arctg(ε/c·sinα), β=arctg(ε/c·cosα),
где ε - эксцентриситет и c - межцентровое расстояние - характерные биометрические параметры блоковидного тела сустава.
При этом биометрические параметры ε и с могут быть определены различными способами, в том числе рентгенографией здорового сустава пациента. Как показали исследования, углы α и β в зависимости от вышеперечисленных параметров составляют: γ (угол пронации-супинации) находится в пределах от 7 до 15° при α=90° до 0° при α=180° (полный разгиб); β (вальгусный угол) находится в пределах от 0° при α=90° и от 7 до 15° при α=180° (полный разгиб).
За счет введения данных дополнительных движений (вращения и отклонения) существенно снижается взаимодействие суставных поверхностей, заключенных в общую капсулу. Это объясняется тем, что плечелоктевой сустав находится между поверхностью блока плечевой кости и блоковидной вырезкой локтевой кости и является винтообразным суставом. В этой же капсуле находится плечелучевой сустав и проксимальный лучелоктевой сустав. Было установлено, что движение плечелоктевого сустава по винтовой траектории предусмотрено природой именно с целью уменьшения взаимного давления суставных поверхностей.
Реализация данного способа восстановления функции суставов механотерапией возможна как применением любого из известных трехстепенных приводов, использующих, например, карданный подвес (параллельное соединение звеньев) или последовательное соединение звеньев, так и применением одностепенного привода, но при условии организации сложного трехстепенного относительного движения суставных концов в шарнире.
Благодаря наличию указанных отличительных признаков в совокупности с известными (указанными в ограничительной части формулы) достигается следующий технический результат - за счет задания трех указанных движений предельно уменьшается взаимодействие суставных поверхностей. Это в свою очередь уменьшает мышечные напряжения при разгибании и сгибании, тем самым позволяя увеличить безболевой объем движений в суставе, а значит время и полноценность его восстановления. Поскольку же указанные трехкомпонентные движения полностью контролируемы и не выходят за рамки, установленные биомеханическими параметрами сустава, то исключается возможность возникновения нестабильности в суставе.
В результате поиска по источникам патентной и научно-технической информации совокупность признаков, характеризующая предложенный способ для восстановления функции суставов, не была обнаружена. Таким образом, предлагаемый способ соответствует критерию охраноспособности "новое".
На основании сравнительного анализа предложенного способа с известным уровнем техники по источникам научно-технической и патентной литературы можно утверждать, что между совокупностью признаков, в том числе и отличительных, и выполняемых ими функций и достигаемых целей имеется неочевидная причинно-следственная связь. На основании вышеизложенного можно сделать вывод о том, что техническое решение не следует явным образом из уровня техники и, следовательно, соответствует критерию охраноспособности "изобретательский уровень".
Предложенное техническое решение может найти применение при восстановлении функций локтевых суставов с использованием любых, как чрескостных, так и мягких (манжетных) механотерапевтических устройств неподвижной фиксации и, следовательно, соответствует критерию охраноспособности "промышленно применимо".
Предлагаемое техническое решение поясняется фиг.1-4.
На фиг.1 изображен локтевой сустав при сгибе (α=90°) и при полном разгибе (α=180°).
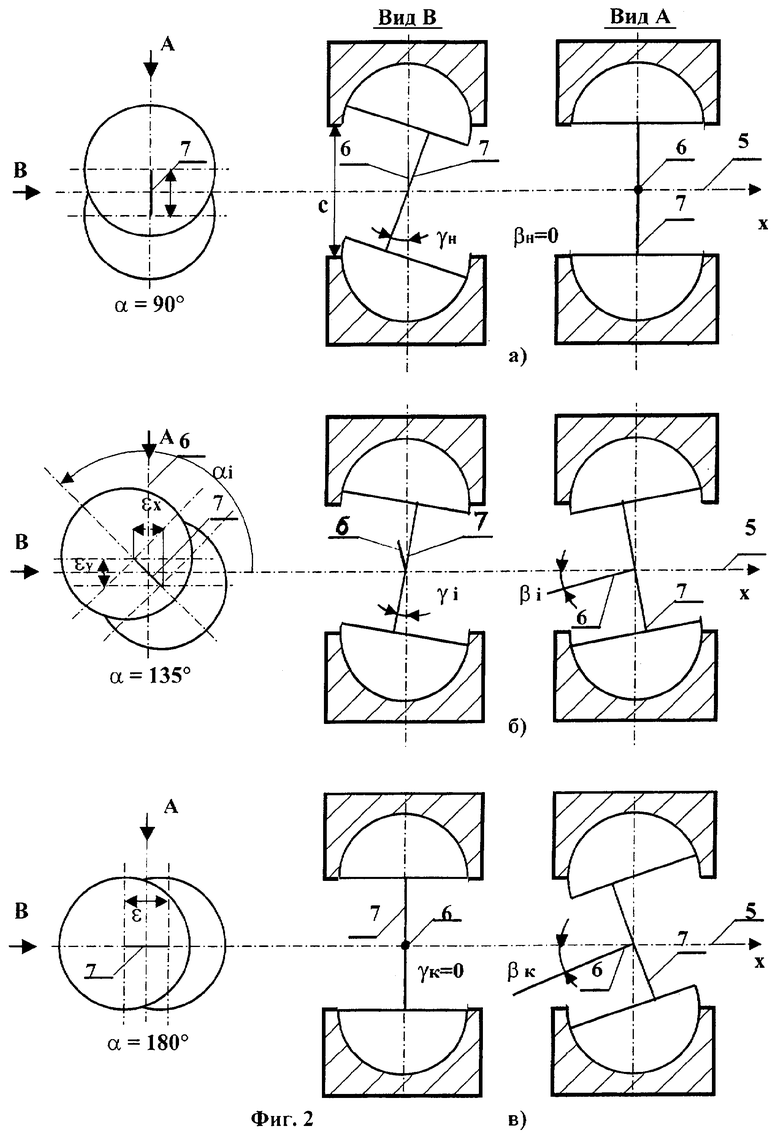
На фиг.2 изображена идеализированная модель плечелоктевого сустава.
На фиг.3 изображен аппарат для восстановления функции суставов, в котором применяется одностепенной привод, а шарнир выполнен с возможностью реализации пространственного (трехстепенного) движения в суставе.
На фиг.4 изображен регулятор эксцентриситета трехстепенного шарнира.
Изображенный на фиг.1 плечелоктевой сустав состоит из блока плечевой кости 1, плечевой кости 2, локтевой кости 3, лучевой кости 4.
На фиг.2 обозначены 1 - длинная ось 5 плечевой кости 2, длинная ось 6 локтевой кости 3, поперечная ось 7 локтевой кости и показано:
а) взаимное положение осей 5, 6, 7 при α=90°,
б) взаимное положение осей 5, 6, 7 при α=135°,
в) взаимное положение осей 5, 6, 7 при α=180°.
Модель плечелоктевого сустава соответствует реальному биологическому суставу, если углы α, β, γ модели в каждой их комбинаций соответствуют углу сгиба, углу пронации-супинации и углу отведения-приведения биологического сустава соответственно.
Из геометрических построений фиг.1 и фиг.2 следует, что для крайних углов α, равных 90° и 180°, вышеприведенное условие выполняется, если обеспечивается равенство соотношений
где εм, εc, ε и См, Сс, С - соответственно эксцентриситет и межцентровое расстояние для модели сустава и для сустава. Если показать, что при выполнении условия (1) выполняется вышеприведенное равенство углов при всех углах α, то число К из (1) является коэффициентом подобия для моделей локтевого сустава любых размеров.
Из рассмотрения фиг.2 следует, что при разгибе в модели плечелоктевого сустава происходит одновременный поворот длинной и поперечной осей сустава. При этом поперечная ось (вид В) поворачивается на угол γ вокруг длинной оси (пронация-супинация) и длинная ось, поворачиваясь по α, одновременно поворачивается на угол β (отведения-приведения) - вид А.
Таким образом, качественная картинка модели соответствует биомеханическому движению.
Из геометрических построений фиг.2 следуют соотношения для модели:

где γo=γ (при α=90°; βк=β) при α=180°.
Для углов αi≠90° и αi≠180° можно записать разложив ε на εx и εy.

Тогда для любого угла αi можно записать
 и
и 

Полученные соотношения (4) для модели справедливы для биомеханического сустава, если движение в биомеханическом суставе по закону (4) будет сопровождаться наименьшими взаимными нагрузками между сегментами сустава, точнее, если сила, действующая вдоль оси 7 (назовем ее Fz) и момент вращения или момент ротации (назовем его Мх) будут минимальны.
Указанные измерения были проведены на установке "Радуга-ЦИТО", описанной в патенте РФ № 2240749.
Установка содержит подвижную и неподвижную фермы, которые жестко чрезкостно соединяются с локтевой и плечевой костью. Между собой фермы соединены многокомпонентными тензовесами. В подвижной ферме имеется возможность регулировать углы γ и β.
В ЦИТО им. Н.Н.Приорова проведены следующие измерения. При повороте на угол αi, настраивались углы γi и βi по показаниям тензовесов так, что Fz=0 и Мх=0. Построенные зависимости γi(α) и βi(α) с достаточной точностью соответствуют формулам (4). Вышеприведенные измерения подтверждают необходимость движения в локтевом суставе по траектории, описанной формулой (4) с целью обеспечения минимальных взаимных давлений между сегментами сустава.
Изображенный на фиг.3 аппарат для восстановления функции суставов механотерапией содержит неподвижную 8 и подвижную 9 платформы, на которых неподвижно закреплены устройства, фиксирующие сегменты конечностей (в данном случае фермы) - неподвижная (опорная) ферма 10 и подвижная (поворотная) ферма 11, каждая из которых состоит из пары скоб 12, соединенных между собой шпильками 13. Скобы 12 оснащены спицедержателями 14 для закрепления проведенных через фрагменты конечности спиц 15. Платформы 8 и 9 соединены между собой посредством шаровых шарниров 16, которые состоят из жестко соединенных с неподвижной платформой 8 шаровых опор 17, и жестко соединенных с подвижной платформой 9 полу шаров 18. Платформа 9 соединена с полушарами 18 осями 19, которые образуют с центрами полушаров 18 эксцентриситет ε/2. Вальгусный угол в диапазоне от 7° до 15° регулируется при помощи изменения эксцентриситета следующим механизмом. В полушаре 18 (фиг.4) выполнен Т-образный паз, в котором при помощи регулировочного винта 20 ходит Т-образное основание 21 оси 19. Винт 20 соединен с основанием 21 посредством расположенного в пазу основания 21 подшипника 22, зафиксированного пружинной шайбой 23.
Вышеописанный аппарат работает следующим образом.
При операции на пациента устанавливаются неподвижная 10 и подвижная 11 фермы, которые затем фиксируются относительно друг друга жестко или шарнирно с фиксацией дистрактором. Перед началом работы на предложенном аппарате производится настройка эксцентриситета шарниров. Для этого определяется вальгусный угол β пациента путем замера данного угла на здоровом суставе. Общий эксцентриситет ε определяется по формуле ε=с·tgβ, где с - расстояние между центрами подвижных частей шарниров, β - вальгусный угол сустава, а эксцентриситет каждого шарнира соответственно равен ε/2. Его настройка производится путем вращения регулировочных винтов 20, благодаря чему основание 21 оси 19 перемещается внутри Т-образного паза в полушаре 18. После установки соответствующего данному больному эксцентриситета ферма 10 закрепляется на неподвижной платформе 8, а ферма 11 на подвижной платформе 9, после чего фермы 10 и 11 рассоединяются между собой. Затем начинают производить циклические движения для восстановления формы и функции сустава. При этом благодаря эксцентриситету ось 19 взаимного вращения платформ 8 и 9 совершает сложные движения, которые характеризуются при полном разгибе вальгусным углом β, равным в зависимости от физиологических особенностей пациента значению, находящемуся в диапазоне от 7° до 15°. При сгибе данный угол уменьшается до нулевого значения в согнутом суставе 0. Движение платформ 8 и 9 может осуществляться как усилиями самого больного, так и посредством электропривода.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТ ДЛЯ ВОССТАНОВЛЕНИЯ ФУНКЦИИ СУСТАВОВ МЕХАНОТЕРАПИЕЙ | 2005 |
|
RU2277894C1 |
| ЭНДОПРОТЕЗ ЛОКТЕВОГО СУСТАВА | 2004 |
|
RU2264196C1 |
| ЭНДОПРОТЕЗ ЛОКТЕВОГО СУСТАВА | 2004 |
|
RU2264195C1 |
| МОДУЛЬНОЕ ОРТОПЕДИЧЕСКОЕ КРЕСЛО-ТРЕНАЖЕР | 2009 |
|
RU2423961C2 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ФУНКЦИИ СУСТАВОВ МЕХАНОТЕРАПИЕЙ | 2002 |
|
RU2214212C1 |
| СПОСОБ УДЛИНЕНИЯ БЕДРЕННОЙ КОСТИ С ОДНОВРЕМЕННЫМ ВОССТАНОВЛЕНИЕМ БИОМЕХАНИЧЕСКОЙ ОСИ КОНЕЧНОСТИ | 2010 |
|
RU2441617C1 |
| СПОСОБ РЕПОЗИЦИОНИРОВАНИЯ БИОМЕХАНИЧЕСКОЙ ОСИ КОНЕЧНОСТИ ПРИ ЭЛЛИПСОВИДНОЙ ДЕФОРМАЦИИ ГОЛОВКИ БЕДРЕННОЙ КОСТИ | 2006 |
|
RU2326616C2 |
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ КОКСАРТРОЗА ПРИ ДЕФОРМАЦИИ ГОЛОВКИ БЕДРА | 1999 |
|
RU2192196C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФУНКЦИИ ЛОКТЕВОГО СУСТАВА | 2000 |
|
RU2198613C2 |
| СПОСОБ СКЕЛЕТНОГО ВЫТЯЖЕНИЯ ПРИ ПЕРЕЛОМАХ ДЛИННЫХ КОСТЕЙ НИЖНИХ КОНЕЧНОСТЕЙ | 1999 |
|
RU2202300C2 |


Изобретение относится к области медицины, в частности к способам механотерапевтического восстановления функции суставов. Сущность способа: включает реверсивные относительные движения сгиба-разгиба сегментов сустава, одновременно с относительным движением сгиба-разгиба на угол α осуществляют поворот подвижного сегмента сустава относительно его продольной оси на угол γ, а также отклонение свободного конца подвижного сегмента сустава относительно плоскости сгиба-разгиба суставных концов на угол β, определяемые исходя из условий γ=arctg(ε/c·sinα), β=arctg(ε/c·cosα), где ε - эксцентриситет и с - межцентровое расстояние - характерные биометрические параметры блоковидного тела сустава. Способ обеспечивает создание условий для восстановления движений в суставе. 4 ил.
Способ восстановления функции суставов механотерапией, включающий реверсивные относительные движения сгиба-разгиба сегментов сустава, отличающийся тем, что одновременно с относительным движением сгиба-разгиба на угол α осуществляют поворот подвижного сегмента сустава относительно его продольной оси на угол γ, а также отклонение свободного конца подвижного сегмента сустава относительно плоскости сгиба-разгиба суставных концов на угол β, определяемые исходя из условий
γ=arctg(ε/c·Sinα), β=arctg(ε/c·Cosα),
где ε - эксцентриситет и с - межцентровое расстояние - характерные биометрические параметры блоковидного тела сустава.
| ШАРНИРНО-ДИСТРАКЦИОННЫЙ АППАРАТ С СИСТЕМОЙ КОНТРОЛЯ И НАСТРОЙКИ | 2003 |
|
RU2240749C1 |
| Устройство для указания направления электрического тока | 1931 |
|
SU24923A1 |
| Повреждение локтевого сустава при занятиях спортом | |||
| М.: Лесар-арт, 2000, 157 | |||
| LYLE j Micheli et all | |||
| The sport MEDICINE BIBLE, С-Петербург, Дэвид Мэтлок, 1997, 80-91. | |||

