Область техники
Изобретение относится к таким средствам управления стационарными объектами или транспортными средствами, которые могут быть использованы и при ограниченной подвижности плеча, предплечья и кисти руки оператора.
Объектами управления являются, преимущественно, бортовые системы летательных аппаратов, управление которыми со значительной амплитудой движения руки или обеих рук пилота или оператора при некоторых условиях полета предпочтительно, а при других условиях нежелательно, затруднено или невозможно.
В число управляемых могут входить множества групп и группы несовпадающих бортовых систем, указанных в описаниях изобретений по патентам US 5992290, RU 2177438, RU 2174485.
Предшествующий уровень техники
Управление без снятия рук с рычагов, в основном, реализует способ А.А.Титова по патенту RU №2137678. Этим способом предусмотрено раскрытие иерархического меню на разные стороны экрана индикатора при нажатии на многофункциональную кнопку и циклический перебор ее функций, обозначенных символами на экране индикатора напротив многофункциональной кнопки, при повторном нажатии на нее. В соответствии с запрограммированной последовательностью действий оператора при исполнении одного действия маркированием определяют следующее действие. Следующее действие определяют путем нажатия кнопки “согласие”, расположенной на рычаге управления, в случае согласия с определенным ранее действием. В случае же несогласия - выбором другого действия путем перемещения подвижного маркера по знакоместам многофункциональных кнопок с помощью нажатия переключателя “перевыбор”, также расположенного на рычаге управления, в стороны (влево, вправо, вверх, вниз), или циклическим перебором функций многофункциональной кнопки нажатием на переключатель “перевыбор” прямо. При запаздывании по выполнению определенного ранее действия подают звуковой сигнал, синхронизированный с миганием подвижного маркера, а в случае ошибочного выполнения действия его блокируют с выдачей сообщения речевым информатором и на экран индикатора о причинах его запрещения.
Предусмотренное изобретением нажатие многофункциональной кнопки на периферии индикатора связано с тем, что оператор снимает руку с рычага управления. Циклический перебор большого числа функций на экране индикатора требует особо высокой концентрации внимания оператора. Как следует из формулы изобретения, способ чреват запаздыванием и ошибками управления. Все это ограничивает возможность использования изобретения.
Управление без снятия рук оператора с рычагов (комплексных органов управления) реализовано полезной моделью RU №24295. Оперативное управление осуществляется многофункциональными кнопочными органами и кнопочными переключателями их функций. Многофункциональные органы и переключатели их функций установлены на комплексных органах управления. При управлении оператор руководствуется видеоинформацией на экране визуального индикатора. Формирование нужных управляющих команд и видеокадров осуществляет ЭВМ, которая связана с органами оперативного управления, визуальным индикатором и органами непосредственного управления систем. ЭВМ снабжена программами, реализующими соответствующие алгоритмы. После отображения на экране визуального индикатора исходной видеоинформации оператор воздействует пальцами рук поочередно на многофункциональный орган и переключатель его функций. Такое воздействие осуществляется до завершения настройки управляемых систем на требуемые варианты их функционирования и режимы работы. При настройке оператор руководствуется видеоинформацией об изменяемых положениях и функциях многофункциональных органов управления. Полезная модель №24295 не предусматривает альтернативного - по желанию оператора - чередования оперативного управления и управления посредством пультовых органов.
Раскрытие изобретения
Изобретение решает задачу повышения надежности, удобства и комфортности управления за счет обеспечения возможности выборочного контролируемого воздействия оператором или пилотом на средства управления систем посредством многофункциональных органов оперативного управления на комплексных органах управления при незначительной амплитуде движения рук оператора или пилота либо посредством органов неоперативного управления, расположенных вне комплексных органов на пультах рабочих мест пилота или оператора.
Система управления содержит один или два комплексных органа управления, установленные, соответственно, под кисть одной из рук или кисти обеих рук оператора или пилота при незначительной амплитуде движения руки или обеих рук. На комплексных органах управления установлен, по меньшей мере, один многофункциональный тактильный орган оперативного управления и, по меньшей мере, один тактильный переключатель для оперативной перемены функций многофункциональных тактильных органа или органов. Тактильный означает осязательный (словарь иностранных слов. М.: Русский язык, 1989). Каждый многофункциональный тактильный орган и тактильный переключатель установлен с возможностью воздействия на него пальцами руки оператора или пилота, находящейся на комплексном органе управления, для опосредствованного воздействия на средства непосредственного управления систем, расположенные вне рабочего места оператора или пилота. Система содержит также визуальный индикатор в виде дисплея или иного средства отображения видеоинформации, расположенный в поле зрения оператора или пилота, и цифровую электронно-вычислительную машину (ЭВМ) со средствами формирования видеокадров графической, словесной, цифровой, световой или цветной информации. Цифровая ЭВМ электрически связана с:
- многофункциональными тактильными органом или органами,
- тактильными переключателем или переключателями,
- визуальным индикатором,
- средствами непосредственного управления бортовых систем, реализующими команды на изменение вариантов функционирования и режимов работы систем через их соответствующие вычислительно-логические элементы, электрически связанные с пультовыми тактильными органами неоперативного управления,
и снабжена программным обеспечением для:
- формирования и передачи на средства непосредственного управления систем управляющих команд задания начального состояния вариантов их функционирования и режимов работы,
- перемены функций многофункциональных тактильных органа или органов вследствие воздействия оператором или пилотом на тактильные переключатель или переключатели,
- формирования и передачи на средства непосредственного управления систем команд, определенных воздействием оператора на многофункциональные тактильные орган или органы,
- формирования команд для передачи на визуальный индикатор:
схематических изображения или изображений многофункциональных тактильных органа или органов со словесной, цифровой, световой или цветной видеоинформацией о возможных функциях этих органа или органов, в том числе определенных воздействием оператора или пилота на тактильные переключатель или переключатели,
словесной, цифровой, световой или цветной видеоинформации о реализуемых вариантах функционирования или режимах работы управляемых систем, определенных воздействием оператора на многофункциональные тактильные орган или органы либо на пультовые органы неоперативного управления этих систем,
- словесной, цифровой, световой или цветной видеоинформации о функциях многофункциональных тактильных органа или органов, подлежащих реализации вследствие передачи управляющих сигналов на средства непосредственного управления систем.
Согласно способу управления поддерживают или изменяют варианты функционирования или режимы работы управляемых систем тактильным воздействием на органы, расположенные на одном или двух комплексных органах управления под кисти, соответственно, одной или обеих рук оператора или пилота при незначительной амплитуде движения соответствующих руки или рук. Тем самым опосредствованно воздействуют на средства непосредственного управления систем, расположенные вне рабочего места оператора или пилота. Для указанного воздействия используют:
- по меньшей мере, один многофункциональный тактильный орган, установленный на комплексном органе управления,
- по меньшей мере, один тактильный переключатель функций многофункциональных тактильных органа или органов, установленный на комплексном органе управления,
- визуальный индикатор, расположенный в поле зрения оператора или пилота,
- цифровую электронно-вычислительную машину (ЭВМ) со средствами формирования видеокадров графической, словесной, цифровой, световой или цветной видеоинформации. При этом цифровая ЭВМ электрически связана с:
- многофункциональными тактильными органом или органами,
- тактильными переключателем или переключателями,
- визуальным индикатором,
- средствами непосредственного управления бортовых систем, реализующими команды на изменение вариантов функционирования и режимов работы систем через их соответствующие вычислительно-логические элементы, электрически связанные с пультовыми тактильными органами неоперативного управления,
- формирования и передачи на средства непосредственного управления систем управляющих команд начальных вариантов функционирования и режимов работы управляемых систем,
- перемены функций многофункциональных тактильных органа или органов вследствие воздействия оператором или пилотом на тактильные переключатель или переключатели,
- формирования и передачи на средства непосредственного управления систем управляющих команд, определенных воздействием оператора или пилота на многофункциональные тактильные орган или органы,
- формирования и передачи на визуальный индикатор:
схематических изображения или изображений многофункциональных тактильных органа или органов со словесной, цифровой, световой или цветной видеоинформацией о возможных функциях этих органа или органов, в том числе определенных воздействием оператора или пилота на тактильные переключатель или переключатели,
- словесной, цифровой, световой или цветной видеоинформации о реализуемых вариантах функционирования или режимах работы управляемых систем, определенных воздействием оператора на многофункциональные тактильные орган или органы либо на пультовые органы неоперативного управления этих систем,
- словесной, цифровой, световой или цветной видеоинформации о функциях многофункциональных тактильных органа или органов, подлежащих реализации вследствие передачи управляющих сигналов на средства непосредственного управления систем.
После отображения на визуальном индикаторе схематических изображения или изображений многофункциональных тактильного органа или органов со словесной, цифровой, световой или цветной видеоинформацией о возможных, в том числе заданных или реализуемых, функциях этих органа или органов при определении задачи или ситуации управления, вариантов функционирования и режимов работы управляемых систем поочередно воздействуют пальцами одной или обеих рук оператора или пилота на, по меньшей мере, один тактильный переключатель и, по меньшей мере, один многофункциональный тактильный орган до завершения настройки управляемых систем на требуемые варианты их функционирования или режимы работы, руководствуясь при этом графической, словесной, цифровой, световой или цветной видеоинформацией о положении и функциях многофункциональных тактильных органа или органов.
При неоперативном управлении бортовыми системами посредством пультовых органов ЭВМ формирует команды и сигналы, идентичные командам и сигналам соответствующих пультовых органов управления.
Объектом управления могут быть бортовые системы летательного аппарата, а комплексными органами управления - рычаг управления летательным аппаратом и рычаг управления его движителем на рабочем месте пилота. Оперативное управление бортовыми системами осуществляют в процессе контроля пилотом летательного аппарата положения летательного аппарата или режима работы его движителя воздействием через комплексные орган или органы - рычаги управления летательным аппаратом или его движителем - на соответствующие задатчики, расположенные на этих рычагах.
Тактильный переключатель может быть предназначен для перемены функций:
на выбор множества групп несовпадающих управляемых систем,
на выбор групп несовпадающих управляемых систем,
на выбор очереди тактильного воздействия,
на выбор ситуации управления системами,
на выбор варианта функционирования или режима работы управляемых систем,
на сочетание выбора ситуации управления системой с выбором ее варианта функционирования или режима работы,
После отображения на визуальном индикаторе схематических изображения или изображений многофункциональных тактильного органа или органов со словесной, цифровой, световой или цветной видеоинформацией о реализуемых функциях этих органа или органов можно воздействовать на тактильный переключатель для перемены функций многофункциональных органа или органов при выборе множества групп систем несовпадающих управляемых систем.
Любой из тактильных органов и переключателей может быть выполнен двух- или более позиционным с кнопочными или иными тактильно чувствительными элементами.
Система управления может включать в себя многофункциональный видеоиндикатор отображения рабочего состояния управляемых систем. При этом цифровая электронно-вычислительная машина снабжена программным обеспечением для формирования команд вызова на экран этого индикатора отображения рабочего состояния управляемых систем.
Цифровая электронно-вычислительная машина может быть снабжена программным обеспечением для формирования и передачи на экран видеоиндикатора словесной информации о реализуемых функциях пультовых органов неоперативного управления, расположенных на периферийном обрамлении видеоиндикатора.
Используя пультовые органы не оперативного управления системами и соответствующее программное обеспечение цифровой электронно-вычислительной машины, формируют и передают на экран видеоиндикатора словесную информацию о функциях пультовых органов, реализуемых при управлении системой, информация о работе которой представлена на экране видеоиндикатора. Информационное взаимодействие цифровой ЭВМ и управляемых систем организовано таким образом, что массив команд, определяющих варианты функционирования и режимы работы этих систем, модифицируется под воздействием не только многофункциональных органов оперативного управления, но и под действием пультовых органов неоперативного управления, например кнопочного обрамления экрана видеоиндикатора. Команды на изменение вариантов функционирования или режимов работы управляемых систем, формируемые в вычислительно-логических элементах средств непосредственного управления систем вследствие воздействия пилота или оператора на пультовые органы неоперативного управления, пересылаются в цифровую ЭВМ. Выходной массив исполняемых команд цифровой ЭВМ всегда, в том числе и в начальный момент, заполняется в результате пересылки из ЭВМ данных, сформированных в ее массивах исполняемых команд, относящихся к конкретным управляемым системам.
При необходимости перехода в процессе оперативного управления системой группы несовпадающих управляемых систем одного из множеств к управлению системой группы несовпадающих управляемых систем другого множества осуществляют тактильное воздействие на тактильный переключатель для перемены функций многофункциональных тактильных органа или органов на выбор множества несовпадающих управляемых систем, контролируя при этом осуществленный выбор по изменению видеоинформации на экране визуального индикатора.
При необходимости в процессе оперативного управления системой одной из групп несовпадающих управляемых систем к управлению системой другой группы несовпадающих управляемых систем того же множества осуществляют тактильное воздействие на тактильный переключатель для перемены функций многофункциональных тактильных органа или органов на выбор группы несовпадающих управляемых систем, контролируя при этом осуществленный выбор по изменению видеоинформации на экране визуального индикатора.
После появления на экране визуального индикатора видеоинформации о возможных задачах управления системами может быть осуществлен выбор задачи управления системами. Для этого воздействуют пальцем руки оператора или пилота на многофункциональный тактильный орган управления, контролируя при этом осуществленный выбор по изменению видеоинформации на экране визуального индикатора.
После появления на экране визуального индикатора видеоинформации о неэкстренной задаче управления системами возможно соответствующее изменение функций многофункциональных тактильных органа или органов. Для этого воздействуют пальцем руки оператора или пилота на один из тактильных переключателей для изменения функций этих органов и контролируют осуществленное воздействие по изменению видеоинформации на экране визуального индикатора.
После появления на экране визуального индикатора видеоинформации о возможных ситуациях управления системами при решении конкретной задачи управления, характеризующихся соответствующими управляемыми системами, варианты функционирования или режимы работы которых нужно изменить, можно осуществить выбор одной из ситуаций управления. Для этого воздействуют пальцем руки оператора или пилота на тактильный переключатель для перемены функций многофункциональных тактильных органа или органов управления системами и контролируют осуществленный выбор по изменению видеоинформации на экране визуального индикатора.
После появления на экране визуального индикатора видеоинформации о реализуемых варианте функционирования и режиме работы управляемой системы в конкретной ситуации управления при решении конкретной задачи управления можно осуществить требуемое изменение варианта функционирования или режима работы этой системы. Для этого воздействуют пальцем руки оператора или водителя на многофункциональный тактильный орган управления и контролируют осуществленное изменение варианта функционирования или режима работы управляемой системы по изменению видеоинформации на экране визуального индикатора.
Описанные система и способ управления характеризуются движениями плеча, предплечья и кисти руки, воздействующими на многофункциональный тактильный орган управления или на тактильный переключатель функций этого органа, с незначительными амплитудами без отрыва от комплексного органа управления. Видеоинформация на экране визуального индикатора достаточна для принятия решений, адекватных изменению условий эксплуатации управляемых систем, и контроля этих решений.
Краткое описание чертежей
В дальнейшем изобретение поясняется конкретными примерами его выполнения со ссылками на прилагаемые чертежи, на которых изображено следующее.
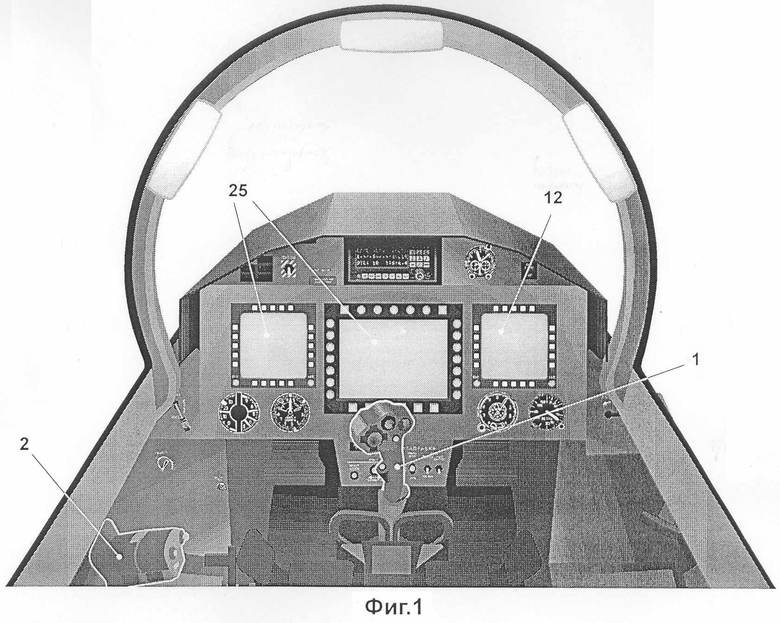
Фигура 1 - общий вид кабины летательного аппарата с рабочего места пилота.
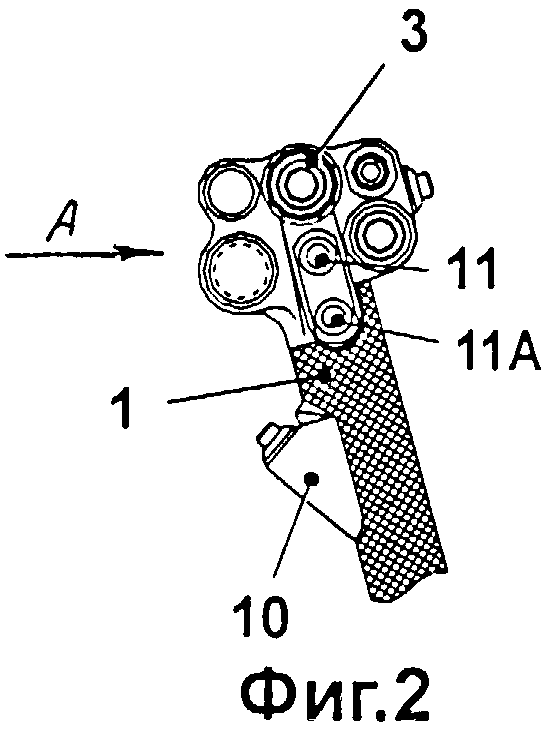
Фигура 2 - рукоятка рычага управления летательным аппаратом.
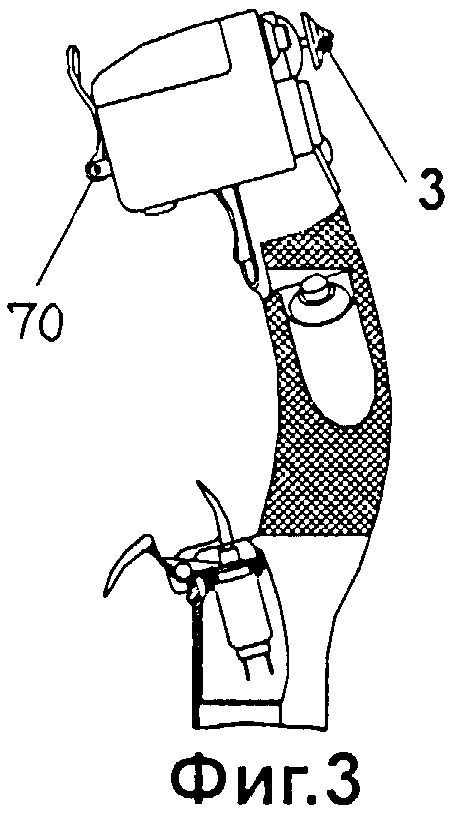
Фигура 3 - вид А фигуры 2.
Фигура 4 - рукоятка рычага управления движителем.
Фигура 5 - вид Б фигуры 3.
Фигура 6 - структурно-логическая схема оперативного управлении одной из групп бортовых систем.
Фигура 7 - структурно-логическая схема выбора группы оперативно управляемых бортовых систем.
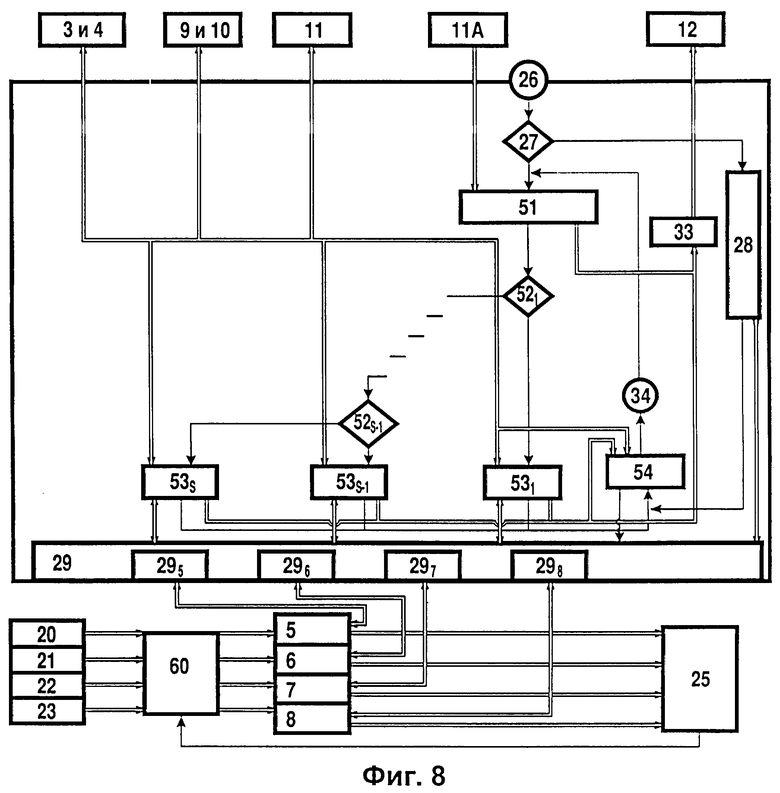
Фигура 8 - структурно-логическая схема выбора множества групп оперативно управляемых бортовых систем.
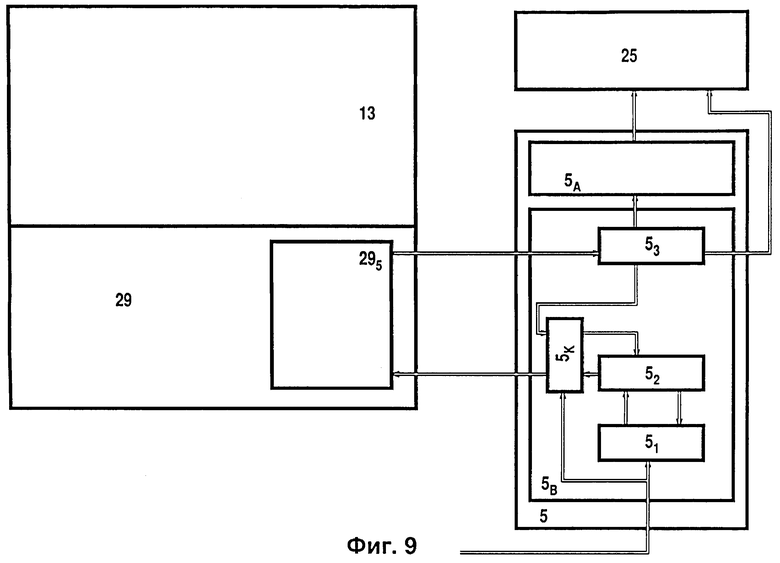
Фигура 9 - структурно-логическая схема связей управляемой бортовой системы с ЭВМ, видеоиндикатором и пультовыми органами неоперативного управления.
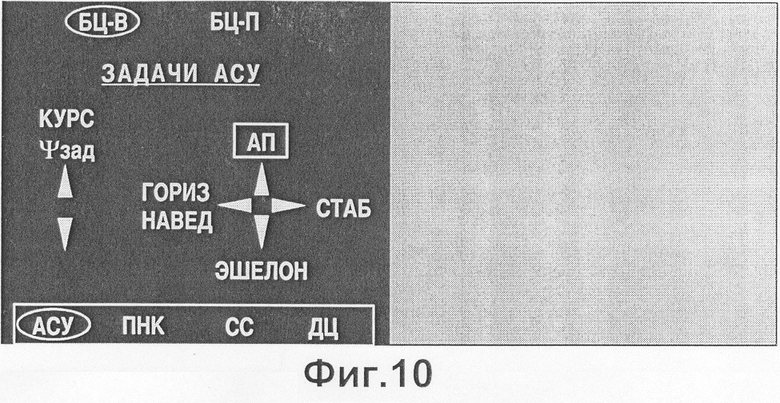
Фигура 10 - видеокадр выбора задачи управления при использовании средств автоматического управления.
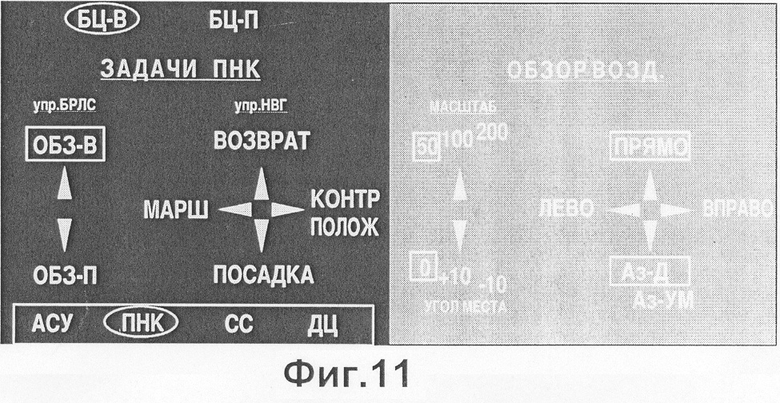
Фигура 11 - видеокадр выбора задачи управления пилотажно-навигационным комплексом.
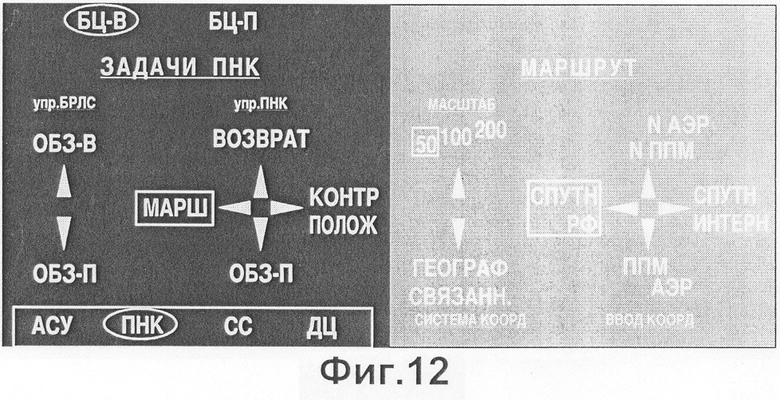
Фигура 12 - видеокадр выбора ситуации управления бортовой станцией для радиолокационного обзора воздуха.
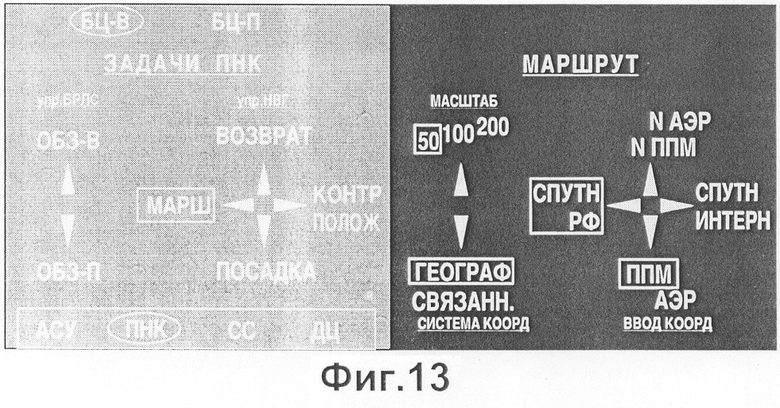
Фигура 13 - видеокадр выбора ситуации управления изменением маршрута.
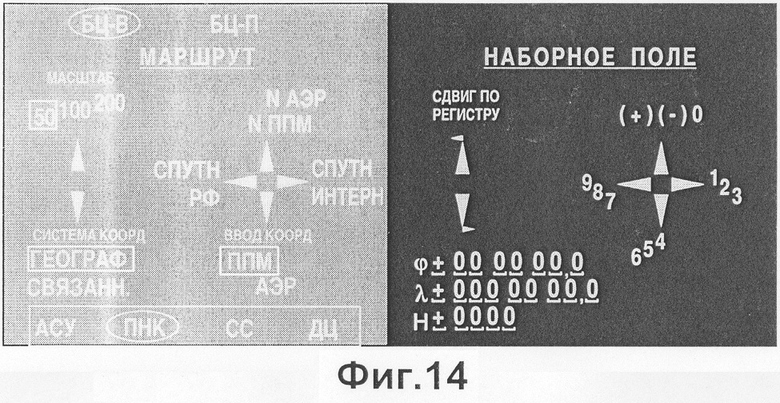
Фигура 14 - видеокадр задания координат промежуточного пункта маршрута.
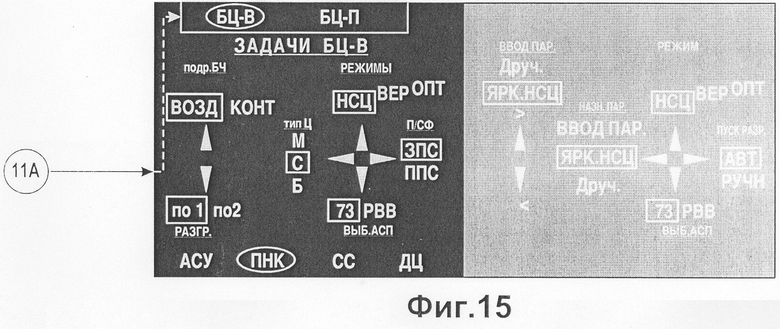
Фигура 15 - видеокадр выбора множества групп оперативно управляемых бортовых систем.
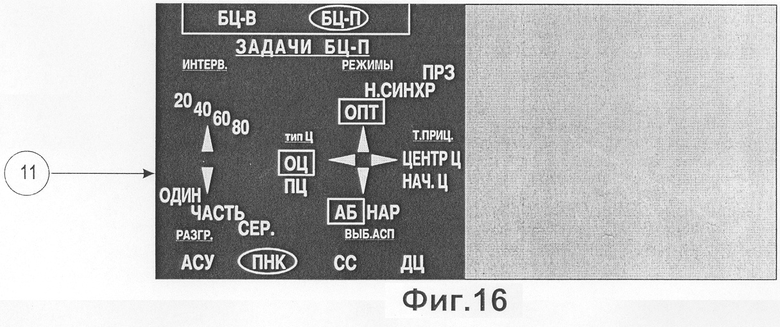
Фигура 16 - видеокадр выбора группы оперативно управляемых бортовых систем в множестве групп экстренного вызова.
Фигура 17 - видеокадр повторного задания координат промежуточного пункта маршрута.
Варианты осуществления изобретений
Далее описаны возможные варианты реализации изобретения применительно к летательному аппарату. Управляемые бортовые системы летательного аппарата входят в состав групп несовпадающих систем. Группы несовпадающих бортовых систем, в свою очередь, входят в состав множеств групп указанных систем экстренного и не экстренного вызова. Каждое множество включает в себя несколько групп несовпадающих бортовых систем. При управлении каждой из групп систем решается соответствующая группа задач.
Система содержит комплексные органы управления в виде рукояток 1 и 2, установленные на рабочем месте пилота. Рукоятка 1 является частью рычага управления летательным аппаратом (РУС), а рукоятка 2 частью рычага управления реактивными двигателями (РУД) движителем летательного аппарата. На рабочем месте другого оператора, например второго пилота или штурмана летательного аппарата, могут быть установлены иные комплексные органы управления (не показаны). Рукоятки 1 и 2 установлены под кисти рук пилота (или второго пилота) с возможностью воздействия на них пальцами при незначительной амплитуде движения рук. Рукоятки 1 и 2 установлены с возможностью воздействия ими на задатчики (не показаны) изменения положения летательного аппарата и изменения режима работы его движителя (не показан).
На рукоятке 1 установлен многофункциональный четырехкнопочный тактильный орган 3, а на рукоятке 2 - многофункциональный двухкнопочный тактильный орган 4. Аналогичные многофункциональные органы могут быть установлены на комплексных органах управления оператора. Многофункциональные тактильные органы 3 и 4 установлены с возможностью воздействия на них пальцами рук пилота для опосредствованного воздействия на средства непосредственного управления бортовых систем, например, 5, 6, 7, 8. Средства непосредственного управления бортовых систем 5, 6, 7, 8 расположены вне рабочих мест оператора и пилота. На рукоятке 1 установлен тактильный (кнопочный) переключатель 9 для перемены функций многофункциональных тактильных органов 3 и 4. На рукоятке 1 установлен тактильный (кнопочный) переключатель 10 для перемены других функций тех же органов 3 и 4. На рукоятке 1 установлены также дополнительные тактильные переключатели 11А и 11. Переключатель 11А предназначен для перемены функций органов 3 и 4 при выборе множества групп систем экстренного или не экстренного вызова. Переключатель 11 предназначен для перемены функций органов 3 и 4 при выборе группы не совпадающих управляемых систем в множестве. Каждый из тактильных переключателей установлен с возможностью воздействия на него пальцем руки пилота или оператора при незначительной амплитуде ее движения. Рукоятки 1 и 2 являются комплексными органами, поскольку они служат для управления как соответствующими задатчиками, так и бортовыми системами летательного аппарата посредством органов 3, 4, переключателей 9, 10, 11, 11А и других кнопок, показанных на фигурах с 1 по 5, в том числе кнопка - гашетка 70.
Визуальный индикатор 12 в виде дисплея или иного средства отображения видеоинформации расположен в поле зрения пилота. Цифровая электронно-вычислительная машина (ЭВМ) 13 предназначена для оперативного управления бортовыми системами, например 5, 6, 7, 8, посредством многофункциональных органов 3 и 4 и переключателей 9, 10, 11, 11А. ЭВМ 13 выполнена со средствами формирования видео кадров графической, словесной, цифровой, световой или цветной видеоинформации и электрически связана с:
- многофункциональными органами 3 и 4,
- переключателями 9, 10 и 11, 11А,
- визуальным индикатором 12,
- средствами непосредственного управления бортовых систем, реализующими команды на изменение вариантов функционирования и режимов работы систем через их соответствующие вычислительно-логические элементы, электрически связанные с пультовыми тактильными органами неоперативного управления.
ЭВМ 13 снабжена программным обеспечением для:
- формирования управляющих команд начального состояния, вариантов функционирования и режимов работы управляемых бортовых систем,
- перемены функций органов 3 и 4 вследствие воздействия оператора или пилота на переключатели 9, 10, 11, 11А,
- передачи на индикатор 12 схематических изображений органов 3 и 4 со словесной, цифровой, световой или цветной видеоинформацией о возможных функциях этих органов, в том числе определенных воздействием оператора или пилота на переключатели 9, 10, 11, 11А,
- передачи на индикатор 12 словесной, цифровой, световой или цветной видеоинформации о реализуемых вариантах функционирования или режимах работы управляемых систем,
- формирования команд для передачи на индикатор 12 словесной, цифровой, световой или цветной видеоинформации о функциях органов 3 или 4, подлежащих реализации вследствие передачи управляющих сигналов на средства непосредственного управления бортовых систем,
- формирования и передачи на средства непосредственного управления бортовых систем управляющих сигналов, определенных воздействием водителя на органы 3 и 4.
Вне рабочих мест оператора и пилота расположены органы управления бортовыми системами прямого действия (не показаны). Органы управления прямого действия предназначены для, например, предполетного задания параметров предполагаемых пункта посадки и маршрута полета, ограничения предельных режимов полета и задания других параметров или режимов, корректировка которых в полете не предусмотрена.
Для неоперативного управления бортовыми системами предназначены кнопочные пультовые органы. Пультовые органы 20, 21, 22, 23 расположены на периферии видеоиндикатора 25 и могут быть использованы для неоперативного управления той бортовой системой, видеоинформация о работе которой выводится на экран индикатора 25. Пультовые органы управления доступны для воздействия на них рук оператора или пилота с отрывом их от комплексных органов управления, в том числе рукояток 1 и 2. Пультовые органы предназначены как для задания начальных вариантов функционирования и режимов работы управляемых систем, так и для изменения вариантов функционирования и режимов работы этих систем.
Средства оперативного и неоперативного управления бортовыми системами могут быть использованы альтернативно с чередованием их использования в процессе одного полета - от взлета до посадки. При оперативном управлении пилот воздействует на органы 3, 4, 9, 10, 11А и 11 без отрыва рук от комплексных органов 1 и 2, а при неоперативном управлении - на пультовые органы с отрывом руки от соответствующего комплексного органа. Как при оперативном, так и при неоперативном управлении пилот получает информацию о работе управляемых систем на экране многофункционального индикатора 25. Команды вызова на экран индикатора соответствующих изображений формируются пультовыми органами управления или ЭВМ 13 вследствие воздействия пилота или оператора на органы управления 3 и 4. На экране индикатора 25 отображаются также параметры полета: скорость, курс, углы атаки и крена и прочее.
К средствам оперативного управления бортовыми системами кроме многофункциональных органов 3 и 4, переключателей 9, 10 11, 11А, индикатора 12 относятся и неаппаратные блоки, формируемые ЭВМ 13. Такими неаппаратными блоками являются:
блок 26 “начало работы”,
блок 27 “заданы ли начальные варианты функционирования и режимы работы бортовых систем?”,
блок 28 формирования управляющих команд, соответствующих начальным вариантам функционирования и режимам работы бортовых систем,
блок 29, являющийся выходным массивом хранения и модификации управляющих команд на средства непосредственного управления бортовых систем и вызова на экран индикатора 25 отображения их рабочего состояния,
I блоков 29i, каждый из которых является выходным массивом хранения и модификации управляющих команд на средство непосредственного управления i-ой бортовой системы и вызова на экран индикатора 25 отображения ее рабочего состояния,
блок 30 формирования команд перехода к процедуре определения задачи управления системами, в том числе, если задача единственная, или управления работой систем при решении определенной задачи,
блок 31 “следует ли обратиться к процедуре определения задачи управления системами?”,
блок 32 формирования базового видеокадра задач управления системами и выбор задачи управления с присвоением ей номера от 1 до Z,
блок 33, являющийся выходным массивом индикации видеокадров,
блок 34 - “продолжение работы”,
Z-1 блоков 35z “равен ли z номер выбранной задачи управления?”,
Z блоков 36z “являются ли начальные варианты функционирования и режимы работы управляемых систем в z-ой задаче управления системами базовыми для всех ситуаций управления?”,
Z блоков 37z формирования управляющих команд задания базовых вариантов функционирования и режимов работы управляемых систем во всех ситуациях управления при решении z-ой задачи,
Z блоков 38z формирования видеокадров возможных и реализуемой ситуаций управления системами в выбранной или единственной задаче управления, присвоения номера j каждой ситуации управления от 1 до J и выбора ситуации управления,
J-1 блоков 39zj “равен ли j номер ситуации управления при решении z-ой задачи управления?”,
Z*J блоков 40zj формирования управляющих команд, соответствующих вариантам функционирования и режимам работы управляемых систем в j-ой ситуации управления при решении z-ой задачи управления,
блок 51 формирования видеокадра выбора множества групп несовпадающих управляемых систем, в том числе групп систем экстренного или не экстренного вызова, с присвоением каждому из этих множеств номера от 1 до S и выбора одного из этих множеств для управления,
S-1 блоков 52s “равен ли s номер множества групп управляемых систем?”
S блоков 53s оперативного управления множеством s групп несовпадающих управляемых систем,
блок 41 формирования видеокадра групп несовпадающих управляемых систем с присвоением каждой из этих групп номера от 1 до Q и выбора одной из этих групп для управления,
Q-1 блоков 42q “равен ли q номер группы управляемых систем?”,
Q блоков 43q оперативного управления группой q несовпадающих управляемых систем.
В каждый из блоков 43 входят соответствующие им блоки с 30 по 40, кроме блоков 33 и 34, а в каждый из блоков 53 входят соответствующие им блоки с 41 по 43.
Число групп несовпадающих управляемых систем в множествах и число несовпадающих управляемых систем в группах различно. При оперативном управлении различными множествами и группами несовпадающих управляемых систем число и содержание задач управления различны. При решении в процессе оперативного управления бортовыми системами разных задач число и содержание ситуаций управления также различны. Поэтому одинаковое обозначение на фигурах 6, 7, 8, 9 и в тексте индексов неаппаратных блоков, соответствующих ситуациям управления при решении различных задач в разных множествах или группах систем условно и вызвано нецелесообразностью усложнять такие обозначения. По тем же причинам условно и совпадение индексов блоков, соответствующих задачам управления различными множествами групп и группами систем.
Программным обеспечением ЭВМ 13 предусмотрено формирование в блоке 29 блоков 29i - выходных массивов хранения и модификации управляющих команд на средства непосредственного управления конкретных альтернативно управляемых систем и вызова на экран индикатора 25 отображения их рабочего состояния. Одним из таких блоков является блок 295. Возможность чередования оперативного и неоперативного управления бортовыми системами в процессе одного полета достигнута программным обеспечением ЭВМ 13 и структурой альтернативно управляемых бортовых систем, а также особенностями связей ЭВМ 13 и управляемых систем между собой и с пультовыми органами управления. Бортовая система 5, в качестве примера одной из альтернативно управляемых систем, содержит средство непосредственного управления, включающее в себя исполнительный блок 5А и вычислительно-логический блок 5В. В свою очередь, блок 5В включает в себя:
блок 51 штатного алгоритма изменения вариантов функционирования и режимов работы системы 5,
блок 52 информации о текущем состоянии функционирования и режиме работы системы 5,
блок 53 информации о вариантах функционирования и режимах работы системы 5,
блок 5К - ключ блокировки входных и выходных сигналов.
Выход ЭВМ 13, соответствующий выходу блока 295 соединен со входом блока 53. Вход ЭВМ 13, соответствующий входу блока 295, соединен с выходом блока 52. Индикатор 25 подключен к блоку 53 непосредственно и через блок 5А. Пультовые органы 20, 21, 22, 23 неоперативного управления подключены через блок 60 коммутации сигналов к блоку 51 и управляющему входу блока 5К. Управляющий вход блока 60 связан с индикатором 25. Через блок 5К связаны блок 52 с блоком 295 и выход блока 53 со входом блока 51. Вход и выход блока 51 связаны с выходом и входом блока 52. Информация, формируемая блоком 53, и информации о вариантах функционирования и режимах работы системы 5, определенная в блоке 295, идентичны. Блок 5к блокирует поступление информации из блока 53 в блок 52 на время окончания модификации информации в блоке 52 и ее передачи в блок 295. Ключ блока 5к замкнут в отношении связи от блока 53 в блок 52 и разомкнут в части связи от блока 52 в блок 295 при отсутствии воздействия на пультовые органы группы 20 и наоборот. Массив команд, определяющих варианты функционирования и режимы работы этих систем в блоке 29, модифицируется под воздействием не только органов 3 и 4, но и под действием пультовых органов с 20 по 23, например, кнопочного обрамления экрана видеоиндикатора 25. Команды на изменение вариантов функционирования или режимов работы систем с 5-ой по 8-ю, формируемые в вычислительно-логических элементах, например в блоке 5В системы 5, вследствие воздействия пилота или оператора на пультовые органы неоперативного управления, пересылаются в, например, блок 295 блока 29. Выходной массив исполняемых команд цифровой ЭВМ всегда, в том числе и в начальный момент, заполняется в результате пересылки из ЭВМ данных, сформированных в ее массивах исполняемых команд, относящихся к конкретным управляемым системам.
При подаче питания описываемая система приводится в состояние готовности к функционированию в режиме как оперативного, так и неоперативного управления. Первоначально блок 27 выдает сигнал “нет”, включая в работу блок 28. Управляющие команды задания начальных вариантов функционирования и режимов работы всех оперативно управляемых бортовых систем через блок 29 поступают в средства непосредственного управления систем, например, их бортовые цифровые вычислительные машины (БЦВМ) и электроприводы исполнительных механизмов. По сигналу срабатывания блока 28 блок 34 выдает сигнал продолжения работы на вход блока 27, который выдает сигнал “да”, приводя систему в состояние готовности к оперативному управлению бортовыми системами. При наличии нескольких множеств групп или нескольких групп несовпадающих управляемых бортовых систем в единственном множестве групп положительный сигнал блока 27 включает в работу блок 41 или 51, соответственно. Если все оперативно управляемые системы входят в единственную группу, включается блок 30 и затем блок 31. При этом возможно наличие единственной задачи управления системами, вследствие чего выбор задачи управления не требуется и блок 32 единственной задаче управления автоматически присваивает номер 1, информация о чем поступает в блок 30. Если единственная задача управления является экстренной, по сигналу “нет” блока 31 в работу включаются блоки 35, 36, 37 и 38. Если же множеств групп или групп в единственном множестве больше единицы, включение блоков 30 происходит после выбора оператором или пилотом соответствующих множества и группы несовпадающих оперативно управляемых систем.
При срабатывании блока 27 на экране индикатора 12 появляется либо видеокадр, например фигуры 10, если предусмотрено оперативное управление более одного множества групп систем, либо видеокадр подобной или другой фигуры с обозначением групп систем без распределения их по множествам, если предусмотрено оперативное управление групп систем одного множества. В процессе оперативного управления бортовой системой одного из множеств групп систем при необходимости перехода к управлению бортовой системой другого множества групп систем осуществляют тактильное воздействие на тактильный переключатель 11А, вследствие чего на экране индикатора 12 также появляется такой видеокадр, как на фигуре 10. Пилот, руководствуясь видеоинформацией, передаваемой блоком 51 через блок 33 на экран индикатора 12, выбирает, воздействуя на переключатель 11А, множество групп систем, подлежащее управлению. В частности, это могут быть множества групп систем экстренного или не экстренного вызова. При воздействии на переключатель 11А, через блоки 52 команда блока 51 на осуществление оперативного управления выбранным множеством групп систем проходит в блоки 53.
Далее, пилот выбирает группу оперативно управляемых бортовых систем в начале работы или в процессе оперативного управления бортовой системой одной из групп при необходимости перехода к управлению бортовой системой другой группы того же множества. Для этого осуществляют тактильное воздействие на тактильный переключатель 11. Пилот, руководствуясь видеоинформацией, передаваемой блоком 41 через блок 33 на экран индикатора 12, выбирает, воздействуя на переключатель 11, группу систем, подлежащую оперативному управлению. При воздействии на переключатель 11 через блоки 42 команда блока 41 на осуществление оперативного управления выбранной группой систем проходит в блоки 43, включая в каждом из них блок 30.
В результате, во всех перечисленных выше случаях описываемая система управления подготовлена как к оперативному режиму управления бортовыми системами посредством органов 3 и 4 и переключателей 9, 10, так и к неоперативному режиму управлению ими посредством пультовых органов управления с возможностью чередования оперативного и неоперативного режимов управления.
Поскольку задача управления системами не определена, после срабатывания блока 30 блок 31 выдает сигнал “да”, включая в работу блок 32. Руководствуясь видеоинформацией, передаваемой блоком 32 через блок 33 на экран индикатора 12, пилот выбирает задачу управления системами множества или группы, воздействуя на орган 3 или 4. При этом формируется соответствующая видеоинформация о перемене функций органов 3 и 4 на экране индикатора 12, передается информация о выборе задачи управления на блок 30 и проходит сигнал на формирование блоком 34 сигнала продолжения работы. Если выбранная или единственная задача управления системами множества или группы не является экстренной, пилот, руководствуясь видеоинформацией на экране индикатора 12, подтверждает выбранную или единственную задачу управления системами, воздействуя на переключатель 9 или 10. При этом формируется соответствующая видеоинформация о перемене функций органов 3 и 4 на экране индикатора 12 и через блоки 31, 35, 36 и 37 включается в работу один из блоков 38. В задействованный блок 38 поступает информация из блока 29 о начальных и базовых вариантах функционирования и режимах работы бортовых систем всех множеств групп во всех возможных ситуациях управления при решении данной задачи. Этот блок 38 формирует и передает через блок 33 на экран индикатора 12 видеоинформацию о возможных ситуациях управления системами при выполнении выбранной или единственной задачи управления. Руководствуясь этой видеоинформацией, водитель выбирает ситуацию управления, характеризующуюся управляемой системой или управляемыми системами множества групп, вариант функционирования или режим работы которой или которых нужно изменить. Выбор достигается воздействием пилота на переключатель 9 или 10. При этом на экран индикатора 12 через блок 33 проходит видеоинформация о выбранной ситуации управления, а через блок или блоки 39 на один из блоков 40 сигнал на его включение в работу. В задействованный блок 40 поступает информация из блока 29 о начальных и возможных вариантах функционирования и режимах работы систем в выбранной ситуации управления при решении данной задачи управления. Исходя из видеоинформации, представленной на экране индикатора 12, о решаемой задаче и ситуации управления системами, пилот устанавливает требуемый вариант функционирования или режим работы соответствующей системы, воздействуя на орган или органы 3 и 4. Вследствие такого воздействия пилота, нужные команды формируются и через блок 29 поступают в соответствующую систему. При этом формируются соответствующие видеокадры с видеоинформацией, поступающей на экран индикатора 12, и сигнал в блок 34 на продолжение работы. При необходимости изменения варианта функционирования или режима работы другой управляемой системы той же группы в процессе решения той же задачи, тем же блоком 38 выбирают иную ситуацию управления и производят требуемую настройку этой системы, воздействуя органом 3 или 4 на другой блок 40.
Используя пультовые органы неоперативного управления системами, расположенные на обрамлении видеоиндикатора 25, и соответствующее программное обеспечение ЭВМ 13, формируют и передают на экран видеоиндикатора 25 словесную информацию о функциях пультовых органов, реализуемых при управлении системой, информация о работе которой представлена на экране видеоиндикатора. Далее изложены некоторые возможные случаи оперативного управления бортовыми системами.
В конкретном описываемом исполнении изобретения к множеству групп несовпадающих систем и системами не экстренного вызова относятся:
- Самолетные системы (СС) в составе:
- средства механизации,
- средства связи с наземными пунктами управления,
- система тушения пожара,
- светотехника,
- управления шасси,
- очистка стекла фонаря.
- Пилотажно-навигационный комплекс (ПНК) в составе:
- инерциальная система,
- радиолокационная система ближней навигации,
- спутниковая навигационная система,
- карта местности.
- Бортовая цифровая вычислительная машина (БЦВМ), обрабатывающая сигналы всех систем комплекса бортового оборудования.
- Бортовая радиолокационная станция (БРЛС) разведки метеорологической обстановки по маршруту полета и обзора земной поверхности.
- Средства автоматического управления самолетом (АСУ).
- Средства поражения дальней цели (ДЦ).
К множеству несовпадающих бортовых систем экстренного вызова относятся системы, функционирующие при, например, тренировке экипажей летательных аппаратов в групповых боевых действиях и в стрельбе авиационными средствами поражения (АСП) по ближним (визуально видимым) целям, расположенным в воздухе (БЦ-В) и на поверхности (БЦ-П).
В процессе полета с использованием средств автоматического управления (АСУ) самолетом на экране индикатора 12 индицируется видеокадр, представленный на фигуре 10. На левом полукадре в нижней части приведены обозначения множества групп систем не экстренного вызова, а в верхней части - обозначения множества групп систем - экстренного вызова. Группа БЦ-В вверху выделена световым эллипсом в качестве приоритетной. Множество групп внизу и группа АСУ в нем выделены, соответственно, световыми прямоугольником и эллипсом, указывая, что эти множество и группа выбраны для оперативного управления. В средней части видеокадра представлены схематические изображения многофункциональных органов управления: справа - четырехкнопочного органа 3, а слева - двухкнопочного органа 4 со словесным указанием их функций, соответствующим различным задачам управления системами группы АСУ.
В процессе полета с использованием средств автоматического управления (АСУ) самолетом оператор или пилот может счесть необходимым получить информацию о метеорологической обстановке по маршруту полета. Для этого нужно сменить группу оперативно управляемых систем с АСУ на ПНК. Воздействуя на кнопку переключателя 11, оператор или пилот вызывает на экран индикатора 12 видеокадр, представленный на фигуре 11. В нижней части левого полукадра видеокадра фигуры 11 обозначение “ПНК” выделено световым эллипсом. В верхней части левого полукадра, выделенной контрастным темным цветом, указаны функции органов 3 и 4, соответствующие различным задачам управления группой систем ПНК. Эти функции являются для органов 3 и 4 рабочими. При нажатии какой-либо кнопки органа 3 или 4 задействуется его функция, указанная напротив соответствующего схематического изображения на видеокадре. Контрастная темная окраска полукадра предназначена для информирования пилота о том, что указанные на нем функции органов 3 и 4 являются рабочими функциями органов. В качестве базовой - предполагаемой первоочередной - задачи управления группой систем ПНК световым прямоугольником на левом “рабочем” полукадре обозначением “МАРШ” выделена задача задания маршрута полета. На правом - “нерабочем” полукадре, окрашенном в неконтрастный светлый тон, указаны возможные функции органов 3 и 4, относящиеся к различным ситуациям управления при задании маршрута полета. Эти функции станут рабочими функциями органов 3 и 4 в том случае, если водитель нажатием кнопки переключателя 10 соответственно изменит их функции, “перекрасив” полукадры видеокадра так, как это показано на фигуре 13.
Поскольку пилоту необходима информация о метеорологической обстановке по маршруту полета, он должен выбрать другую задачу. Нажав верхнюю кнопку органа 4, водитель выбирает задачу управления БРЛС “ОБЗ-В”. При этом световое обрамление обозначения “МАРШ” соответствующей функции органа 4 гаснет и на экране индикатора 12 вместо видеокадра фигуры 11 появляется видеокадр фигуры 12. На его левом полукадре указаны те же рабочие функции органов 3 и 4, что и на левом полукадре видеокадра фигуры 11, но, в отличие от последнего, световым прямоугольником обрамлено обозначение соответствующей функции органов 3 и 4 при решении задачи обзора воздуха бортовой радиолокационной станцией. В качестве базовых изначально заданных вариантов функционирования и режимов работы на правом полукадре фигуры 12 отмечены световыми прямоугольниками функции:
- “прямо” в части направления зоны обзора;
- “АЗ-Д” в части вида развертки;
- “50 км” в части масштаба по дальности;
- “0” в части угла обзора.
Если бы эти функции, обрамленные световыми прямоугольниками, не были определены изначально в качестве наиболее вероятных, оператор или пилот мог бы задать их или другие функции органов 3 и 4 нажатием соответствующих кнопок органов 3 и 4 после нажатия кнопки переключателя 10. Нажатием кнопки переключателя 10 оператор или пилот изменяет функции органов 3 и 4 таким образом, что рабочими становятся их функции, указанные на правом полукадре видеокадра фигуры 12. Вследствие этого реализуются команды управления бортовой радиолокационной станцией, соответствующие указанным выше параметрам зоны обзора, масштаба по дальности, вида развертки и угла обзора, и на экране многофункционального индикатора 25 появляется соответствующее изображение метеорологической обстановки по маршруту полета.
В связи с обнаруженной грозой, препятствующей продолжению полета по ранее выбранному маршруту, пилот должен изменить маршрут. Для этого он может сменить очередную навигационную точку: аэродром (АЭР) или промежуточный пункт маршрута (ППМ). Изменение может быть произведено сменой известного номера такого пункта или заданием его координат, если такой пункт не был заранее запрограммирован. Для изменения маршрута полета пилот нажатием кнопки переключателя 10 восстанавливает функции органов 3 и 4, указанные на левом полукадре видеокадра фигуры 12, и нажимает левую кнопку органа 3. Вследствие этого на экране индикатора 12 возникает видеокадр фигуры 11. Далее нажатием кнопки переключателя 10 пилот изменяет функции органов 3 и 4 на предусмотренные правым полукадром фигуры 13. Нажатием нижней кнопки органа 3 пилот задействует его функцию “ввод координат ППМ”, контролируя это действие по возникновению светового прямоугольника, обрамляющего задействованную функцию на правом полукадре видеокадра фигуры 13. Затем нажатием кнопки переключателя 9 пилот меняет функции органов 3 и 4 на предусмотренные правым полукадром видеокадра фигуры 14 и задает числовые координаты широты ϕ, долготы λ, и высоты Н.
Если вводимый параметр знакопеременен, в его разрядной сетке присутствует знаковый разряд. Первоначально знаковому разряду присвоен знак “+”, а цифровым разрядам всех параметров - цифра “0”. На экране индикатора 12 индицируется световой маркер текущего вводимого параметра, расположенный под вводимым в текущий момент разрядом. Маркер перемещается вдоль разрядной сетки параметра в зависимости от нажатия на верхнюю или нижнюю кнопку органа 4. Первоначально маркер занимает положение под первым разрядом (знаковым или старшим) вводимого числового параметра. Переход на ввод следующего по порядку разряда этого параметра осуществляется нажатием нижней кнопки органа 4. Переход на ввод старшего разряда следующего параметра производится с младшего (последнего) разряда предыдущего параметра нажатием той же нижней кнопки органа 4. Нажатие нижней кнопки органа 4 с последнего разряда последнего параметра переводит маркер под старший разряд первого параметра. При нажатии верхней кнопки органа 4 маркер перемещается от младших разрядов к старшим. Когда маркер находится под некоторым разрядом вводимого параметра, то, воздействуя на соответствующую кнопку органа 3, меняют индицируемый в этом разряде символ на знак числа в знаковом разряде или цифру в цифровом разряде. После установки нужного знака или цифры и воздействуя на орган 4, в этом разряде остается последний заданный перед переходом к следующему разряду символ.
При повторном обращении к любому разряду в случае необходимости изменения символа до воздействия на орган 3 в нем индицируется ранее введенный символ. Поскольку вид представления и разрядная сетка вводимого параметра известны заранее, задание размерности вводимого параметра, например градусов, минут, секунд, а также запятой, отделяющей целую часть от дробной, не требуется. Пересылка введенных параметров из ЭВМ 13 в БЦВМ пилотажно-навигационного комплекса через блок 29 производится нажатием верхней кнопки органа 4 при крайнем левом положении маркера. Аналогично могут быть введены числовые значения параметров любого другого типа.
В дальнейшем, пилот нажатием кнопок переключателей 9 и 10 изменяет функции органов 3 и 4 на предусмотренные правым полукадром видеокадра фигуры 12 и нажатием соответствующих кнопок этих органов задает режим работы БРЛС, необходимый для требуемой разведки метеорологической обстановки по маршруту полета. При отсутствии препятствий для полета к ранее заданному конечному пункту назначения пилот нажатием кнопок переключателей 9 и 10 изменяет функции органов 3 и 4 на предусмотренные видеокадром фигуры 14 и корректирует маршрут полета воздействием на соответствующие кнопки этих органов, используемых для ввода номера очередного ППМ.
В связи с корректировкой маршрута полета возможна необходимость связаться с наземными диспетчерскими службами. В этом случае пилот может нажатием кнопки переключателя вызвать на экран индикатора видеокадр группы бортовых систем СС с последующим управлением системами этой группы посредством переключателей 9 и 10 и органов 3 и 4.
В процессе оперативного управления системой группы ПНК у экипажа летательного аппарата, в связи с полетным заданием, может возникнуть необходимость применения АСП по визуально видимым наземным целям. Для этого нужно сменить множество групп оперативно управляемых систем с ПНК на множество, включающее в себя группу БЦ-П. Воздействуя на кнопку переключателя 11А, пилот вызывает на экран индикатора 12 видеокадр, представленный на фигуре 15. На левом полукадре видеокадра фигуры 15 в верхней части приведены обозначения групп бортовых систем множества групп экстренного вызова, а в нижней части - обозначения групп систем множества групп не экстренного вызова. В качестве приоритетных световыми эллипсами выделены: в верхней части группа систем БЦ-В, а в нижней ПНК. В средней части левого рабочего и правого нерабочего полукадров приведены схематические изображения многофункциональных органов 3 и 4 с указанием: на левом полукадре - задач, решаемых группой систем БЦ-В в первую очередь, а на правом полукадре - функций этих органов, соответствующих дополнительным задачам систем группы БЦ-В. Воздействуя на переключатель 11А, пилот выделяет рамкой светового прямоугольника в качестве рабочего множество групп бортовых систем экстренного вызова. Для перехода от управления выделенной группой БЦ-В к управлению бортовой системой группы БЦ-П того же множества пилот воздействует на тактильный переключатель 11, вследствие чего на экране индикатора 12 появляется видеокадр фигуры 16. В верхней части левого полукадра фигуры 16 световым прямоугольником выделено множество групп систем экстренного вызова, а в нем группа систем БЦ-П. В средней части этого полукадра приведены схематические изображения органов 3 и 4 с обозначением их функций, соответствующих задачам, решаемым группой систем БЦ-П. Световыми прямоугольниками выделены приоритетно решаемые задачи. Далее пилот, чередуя воздействие на органы 3 и 4, реализует требуемое управление системами группы БЦ-П. После выполнения прицеливания по визуально видимой наземной цели пилот для выполнения сброса АБ или пуска ПАР нажимает кнопку 70 на комплексном органе 1.
После выполнения задач, связанных с управлением системами группы БЦ-П, пилот возвращается к управлению множеством групп систем не экстренного вызова воздействием на переключатель 11А с появлением на экране индикатора 12 видеокадра фигуры 17, то есть возвращается к той задаче управления, которая была определена перед сменой множеств групп управляемых бортовых систем.
Очевидно, что специалисты, используя другие известные устройства и средства, могут создать помимо описанных иные системы и способы, реализующие патентуемые изобретения в соответствии с приведенной далее формулой изобретения и возможными эквивалентами включенных в нее признаков.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПЕРАТИВНОГО УПРАВЛЕНИЯ ОБОРУДОВАНИЕМ ПОДВИЖНОГО ОБЪЕКТА | 2021 |
|
RU2773989C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ КРУГЛОСУТОЧНОГО ДЕЙСТВИЯ, КОМПЛЕКС РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЕМЫЙ НА ДАННОМ ВЕРТОЛЕТЕ | 2008 |
|
RU2360836C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МНОГОФУНКЦИОНАЛЬНЫМ ИНДИКАТОРОМ | 2002 |
|
RU2235355C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2022 |
|
RU2791341C1 |
| Корпоративный телемедицинский комплекс для предупреждения эпидемических чрезвычайных ситуаций | 2020 |
|
RU2735400C1 |
| СПОСОБ УПРАВЛЕНИЯ БОРТОВЫМ ОБОРУДОВАНИЕМ МНОГОФУНКЦИОНАЛЬНОГО ОДНОМЕСТНОГО БОЕВОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2828758C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ТЯЖЕЛЫЙ ТРАНСПОРТНЫЙ ВЕРТОЛЕТ КРУГЛОСУТОЧНОГО ДЕЙСТВИЯ, КОМПЛЕКС БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ, ИСПОЛЬЗУЕМЫЙ НА ДАННОМ ВЕРТОЛЕТЕ | 2013 |
|
RU2524276C1 |
| СИСТЕМА АВТОМАТИЗАЦИИ РАБОТЫ ЛЕТНОГО ЭКИПАЖА | 2017 |
|
RU2732646C2 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2551267C1 |
| КОРАБЕЛЬНАЯ ИНТЕГРИРОВАННАЯ МОСТИКОВАЯ СИСТЕМА | 2010 |
|
RU2453909C1 |





Группа изобретений относится к технике управления стационарными объектами и транспортными средствами при ограниченной подвижности плеча, предплечья и кисти руки оператора. Варианты функционирования и режимы работы управляемых систем изменяют воздействием на многофункциональные тактильные органы. Многофункциональные органы расположены на комплексных органах управления под кистями рук оператора. Амплитуда движения рук при этом незначительна. На комплексных органах установлены также переключатели для перемены функций многофункциональных тактильных органов. ЭВМ формирует команды на средства непосредственного управления системами, расположенные вне рабочего места оператора. Средства непосредственного управления бортовыми системами через их соответствующие вычислительно-логические элементы электрически связаны с пультовыми тактильными органами неоперативного управления. После отображения на визуальном индикаторе схематических изображений многофункциональных органов с видеоинформацией о возможных функциях этих органов при определении задачи или ситуации управления, вариантов функционирования и режимов работы управляемых систем поочередно воздействуют пальцами рук оператора на тактильные переключатели и многофункциональные тактильные органы до завершения настройки управляемых систем на требуемые варианты их функционирования и режимы работы. При этом руководствуются видеоинформацией об изменяемых положении и функциях многофункциональных тактильных органов. Группа изобретений повышает надежность, удобство и комфортность управления. 2 с. и 19 з.п. ф-лы, 17 ил.
| АВТОМАТИЗИРОВАННЫЙ СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ БОРТОВЫМ КОМПЛЕКСОМ И СИСТЕМАМИ ЛА | 1998 |
|
RU2137678C1 |
| Сушилка для фруктов, овощей и т.п. | 1928 |
|
SU24295A1 |
| АВИАЦИОННЫЙ КОМПЛЕКС ДЛЯ ГРУППОВЫХ ДЕЙСТВИЙ МНОГОФУНКЦИОНАЛЬНЫХ САМОЛЕТОВ | 2000 |
|
RU2177438C1 |
| US 5992290 A, 30.11.1999 | |||
| US 6128554 A, 03.10.2000. | |||

